Untitled 38
76 11A / . \\ , <h *»a '
zmst =
xl
x2
x3
x4
x5
x6
x7
x8
x9
xlO
/lin_pn/el_linii4/Integrator /lin_pn/el_linii/Integrator /lin_pn/el_linii/Integrator1 /lin_pn/e l_lini.il / Integrator 1 /lin_pn/el_liniil/Integrator /lin_pn/el_linii2/Integrator1 /Iin_pn/el_linii2/Integrator /Iin_pn/el_linii3/Integrator1 /lin_pn/el_linii3/Integrator /lin_pn/el_linii4/Integrator1
wynika, że w kolejności są to następujące zmienne41: x3, x4, x6, x8, xlO.
Powinno to potwierdzić poniższe polecenie, zlecające pokazanie na przykład 40-go wiersza macierzy zmiennych stanu:
» x (1, : )
Columns 1 through 7
1.7982 1.9426 0.0631 0.0579
1.8898 0.0481 1.8459
Columns 8 through 10
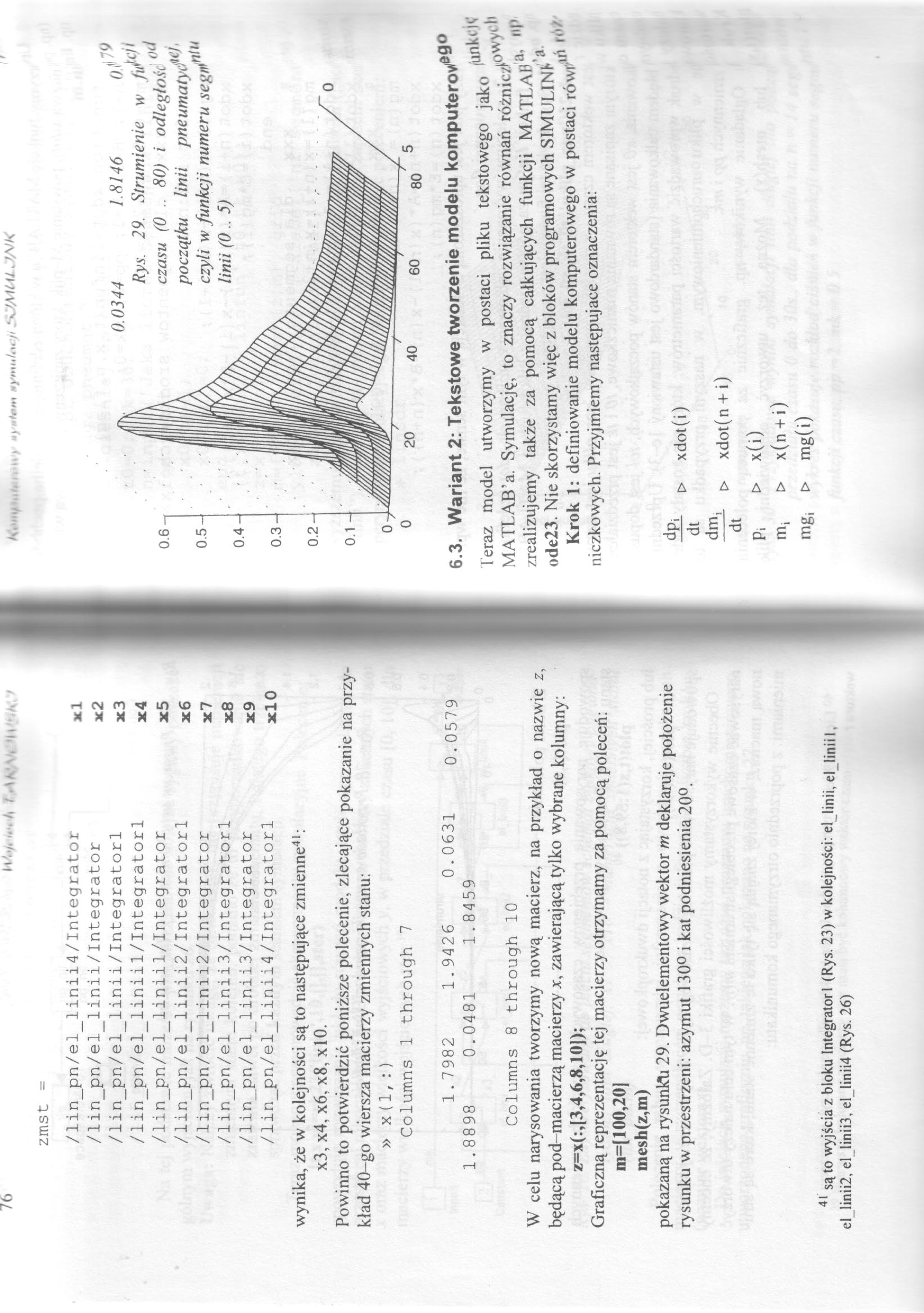
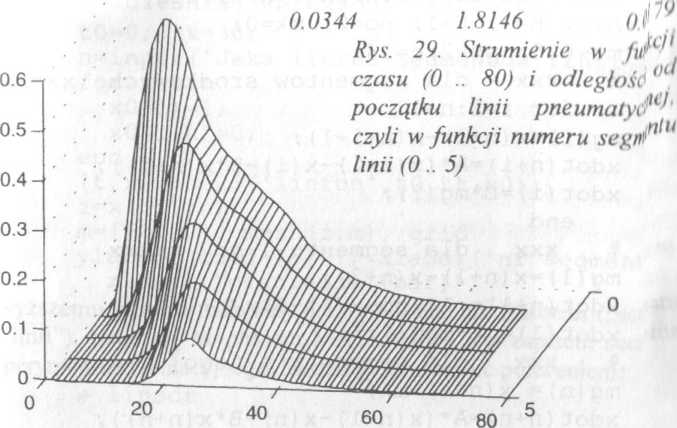
W celu narysowania tworzymy nową macierz, na przykład o nazwie z, będącą pod-macierzą macierzy zawierającą tylko wybrane kolumny: z=x(:,[3,4,6,8,10j);
Graficzną reprezentację tej macierzy otrzymamy za pomocą poleceń: m=[100,201 mesh(z,m)
pokazaną na rysunlćU 29. Dwuelementowy wektor m deklaruje położenie rysunku w przestrzeni: azymut 130° i kat podniesienia 20°.
41 są to wyjścia z bloku Integrator 1 (Rys. 23) w kolejności: el linii, el linii I. el linii2, el Iinii3, el linii4 (Rys. 26)
6.3. Wariant 2: Tekstowe tworzenie modelu komputerov/9°
Teraz model utworzymy w postaci pliku tekstowego jako |Lin^ ^ MATLAETa. Symulację, to znaczy rozwiązanie równań różnic/}0WV' zrealizujemy także za pomocą całkujących funkcji MATLAiłf’ ode23. Nie skorzystamy więc z bloków programowych SIMULINT 3 Krok 1: definiowanie modelu komputerowego w postaci rów/11 " -niczkowych. Przyjmiemy następujące oznaczenia:
|
dpi dt |
o |
xdot(i) |
|
dm, dt P, |
> |
xdot(n + i) |
|
t> |
x(i) | |
|
mi |
> |
x(n + i) |
|
mgi |
> |
mg(i) |
Wyszukiwarka
Podobne podstrony:
7. Rozważmy zmienne Y, XI, X2, X3, X4, X5, X6. Wiadomo, że Xl=2+X4, X4=2X5. Który
Untitled 37 / T 1tv« /v ‘li ł/ /lin_pn/el_liniil/Integrator
Rozwiązywanie zadań optymalizacji 109 - równościowe liniowe xl+x2+x3-10 = 0 ,
img341 (4) Tablica 135 B A yj y 3 y 4 Xl 1 3 5 8 x2 -2 3 3 5 x3 7 -1 1 0 103.
Untitled Scanned 26 - 52 - y - ♦. x2 + x3 • x4 = X1 + x2 + x3 • x4 = - *! + *2 + x
o; xl*x2+xl*x3 l+x2) * (xl+-x3) •’(x2-kx3) xl+x2+x3= f "i orawa d e
dd (22) 41 41 = o (4.10) a(x 1 + x2 + x3 + x4) + 6(1 + 1 +1 + 1) - &nbs
10478250?1689389228465s73544355843340941 o X1 X2 X3 X4 FT-13 FT-14 FT-15 V1 V2 V3 FT-16 FT-17 V4 V5
img428 (3) Podobnie lim (x4 - 3x2 + x -1) = lim X—>+oo X—>+oo X2 X3 X4 = +00
Funkcja malejaca FUNKCJA MALEJĄCA A x>J,x1<x2<x3<x4<xs; y, > y2 > y3 > y* &g
y = (*! + x2 + x3) * (x4 + xa + x2) * (x3 + x4 + x3) * (x7 + x2) * (x3 + x4 + x3 + x2) y = (x3 + x2
więcej podobnych podstron