skanowanie0004
180
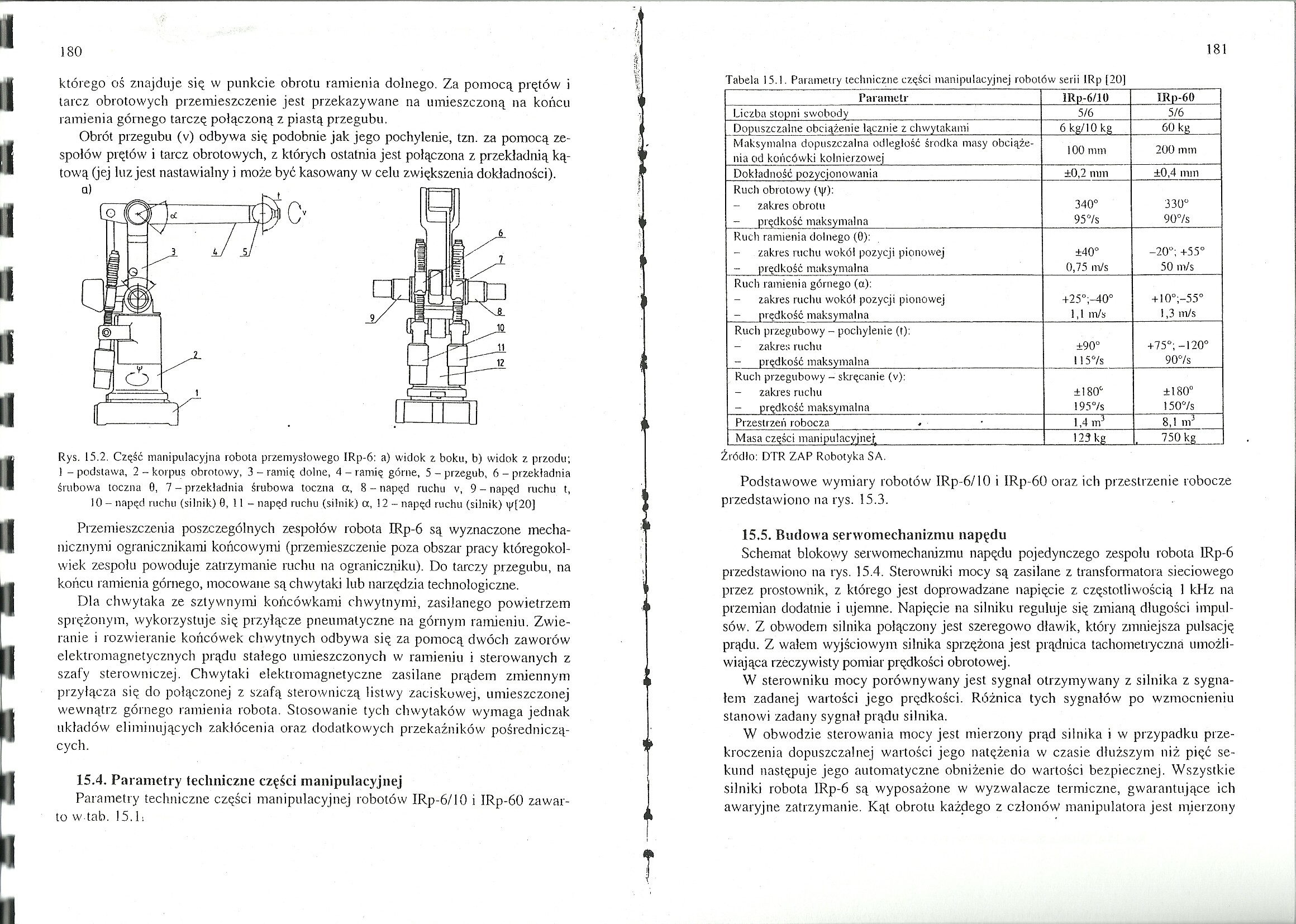
którego oś znajduje się w punkcie obrotu ramienia dolnego. Za pomocą prętów i tarcz obrotowych przemieszczenie jest przekazywane na umieszczoną na końcu ramienia górnego tarczę połączoną z piastą przegubu.
Obrót przegubu (v) odbywa się podobnie jak jego pochylenie, tzn. za pomocą zespołów prętów i tarcz obrotowych, z których ostatnia jest połączona z przekładnią kątową (jej luz jest nastawialny i może być kasowany w celu zwiększenia dokładności).
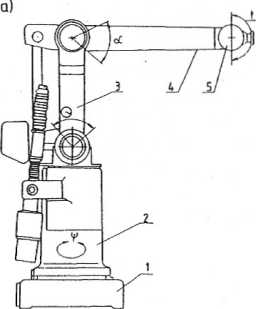
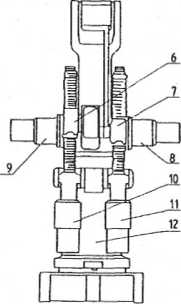
Rys. 15.2. Część manipulacyjna robota przemysłowego IRp-6: a) widok z boku, b) widok z przodu; 1 - podstawa, 2 - korpus obrotowy, 3 - ramię dolne, 4 - ramię górne, 5 - przegub, 6 - przekładnia śrubowa toczna 0, 7 - przekładnia śrubowa toczna a, 8 - napęd ruchu v, 9 - napęd ruchu t, 10 - napęd ruchu (silnik) 0,11 — napęd ruchu (silnik) a, 12 — napęd ruchu (silnik) \j/{20]
Przemieszczenia poszczególnych zespołów robota IRp-6 są wyznaczone mechanicznymi ogranicznikami końcowymi (przemieszczenie poza obszar pracy któregokolwiek zespołu powoduje zatrzymanie ruchu na ograniczniku). Do tarczy przegubu, na końcu ramienia górnego, mocowane są chwytaki lub narzędzia technologiczne.
Dla chwytaka ze sztywnymi końcówkami chwytnymi, zasilanego powietrzem sprężonym, wykorzystuje się przyłącze pneumatyczne na górnym ramieniu. Zwieranie i rozwieranie końcówek chwytnych odbywa się za pomocą dwóch zaworów elektromagnetycznych prądu stałego umieszczonych w ramieniu i sterowanych z szafy sterowniczej. Chwytaki elektromagnetyczne zasilane prądem zmiennym przyłącza się do połączonej z szafą sterowniczą listwy zaciskowej, umieszczonej wewnątrz górnego ramienia robota. Stosowanie tych chwytaków wymaga jednak układów eliminujących zakłócenia oraz dodatkowych przekaźników pośredniczących.
15.4. Parametry techniczne części manipulacyjnej
Parametry techniczne części manipulacyjnej robotów IRp-6/10 i IRp-60 zawarto w tab. 15.1:
Tabela 15.1. Parametry techniczne części manipulacyjnej robolów serii IRp [20]
|
Parametr |
IRp-6/10 |
IRp-60 |
|
Liczba stopni swobody |
5/6 |
5/6 |
|
Dopuszczalne obciążenie łącznie z chwytakami |
6kg/IOkg |
60 kg |
|
Maksymalna dopuszczalna odległość środka masy obciążenia od końcówki kołnierzowej |
100 mm |
200 mm |
|
Dokładność pozycjonowania |
±0,2 mm |
±0,4 mm |
|
Ruch obrotowy (y): zakres obrotu |
340° |
330° |
|
- prędkość maksymalna |
95°/s |
90°/s |
|
Ruch ramienia dolnego (0): zakres mchu wokół pozycji pionowej |
±40° |
-20°; +55° |
|
prędkość maksymalna |
0,75 m/s |
50 m/s |
|
Ruch ramienia górnego (a): zakres mchu wokół pozycji pionowej |
+25°;-40° |
+!0°;-55° |
|
prędkość maksymalna |
1,1 m/s |
1,3 m/s |
|
Ruch przegubowy - pochylenie (t): - zakres mchu |
±90° |
+75°; -120° |
|
- prędkość maksymalna |
1157s |
907s |
|
Ruch przegubowy - skręcanie (v): zakres ruchu |
±180Ł |
±180° |
|
- prędkość maksymalna |
195°/s |
1507s |
|
Przestrzeń robocza • |
1,4 m5 |
8,1 m3 |
|
Masa części manipulacyjnej. |
__ |
1. 750 kg |
Źródło: DTR ZAP Robotyka SA.
Podstawowe wymiary robotów IRp-6/10 i IRp-60 oraz ich przestrzenie robocze przedstawiono na rys. 15.3.
15.5. Budowa serwomechanizmu napędu
Schemat blokowy serwomechanizmu napędu pojedynczego zespołu robota IRp-6 przedstawiono na rys. 15.4. Sterowniki mocy są zasilane z transformatora sieciowego przez prostownik, z którego jest doprowadzane napięcie z częstotliwością 1 kHz na przemian dodatnie i ujemne. Napięcie na silniku reguluje się zmianą długości impulsów. Z obwodem silnika połączony jest szeregowo dławik, który zmniejsza pulsację prądu. Z wałem wyjściowym silnika sprzężona jest prądnica tachometryczna umożliwiająca rzeczywisty pomiar prędkości obrotowej.
W sterowniku mocy porównywany jest sygnał otrzymywany z silnika z sygnałem zadanej wartości jego prędkości. Różnica tych sygnałów po wzmocnieniu stanowi zadany sygnał prądu silnika.
W obwodzie sterowania mocy jest mierzony prąd silnika i w przypadku przekroczenia dopuszczalnej wartości jego natężenia w czasie dłuższym niż pięć sekund następuje jego automatyczne obniżenie do wartości bezpiecznej. Wszystkie silniki robota IRp-6 są wyposażone w wyzwalacze termiczne, gwarantujące ich awaryjne zatrzymanie. Kąt obrotu każdego z członów manipulatora jest mierzony
Wyszukiwarka
Podobne podstrony:
MGW10 80 którego oś znajduje się w punkcie obrotu ramienia dolnego. Za pomocą prętów i tarcz obroto
skanuj0057 (32) mi SU Początkowy ruch przypomina T te, ale jest krótszy. Znajdując się w punkcie (a)
skanuj0057 (32) mi SU Początkowy ruch przypomina T te, ale jest krótszy. Znajdując się w punkcie (a)
r18 duchową. Fizycznie punkt równowagi znajduje się w punkcie ciężkości ciała, to jest w okolicach p
skanowanie0080 Wstęp W książeczce tej znajdują się zabawy logopedyczne usprawniające narządy mowy. P
r18 duchową. Fizycznie punkt równowagi znajduje się w punkcie ciężkości ciała, to jest w okolicach p
w środku elipsoidy lub kuli, oś z pokrywa się z osią obrotu elipsoidy, oś x leży w płaszczyźnie wybr
Położenie punktu M znajdującego się w punkcie A opisujemy wektorem r r =/(, -,) Prędkość punktu w m
81994 r18 duchową. Fizycznie punkt równowagi znajduje się w punkcie ciężkości ciała, to jest w okoli
083a 6FormacjeFORMACJE JEDNODNIOWE Luki Luka powstaje w dniu, którego minimum znajduje się powyżej m
58 S. Jewtuchowicz strumień, którego źródła znajdują się na południowym stoku najwyższej części
powodu rosną ceny) Jeśli gospodarka kraju znajduje się w punkcie A to działania powodujące wzrost po
Parametry kinematyczne Położenie Wektor, ktorego początek znajduje się w początku układu
więcej podobnych podstron