zadKasa
Egzamin z Teorii Sterowania Zadania rachunkowe (gr. B) 8 02 2006r
UWAGI OGÓLNE: Kolor atramentu musi być zdecydowanie ciemniejszy od kratek na kartce Tok liczenia powinien byc jednoznaczny opatrzony zwartym komentarzem Wskazane oznaczanie wszystkich podstawień poprzez stosowanie numeracji wzorów lub innych sSwnhAu Jeśli kolejne kroki liczenia me następują po sobie w kolejnych wierszach należy to Osoby nie pracujące samodzielnie będą wypraszane z sali. czyc<
ZAD.1.
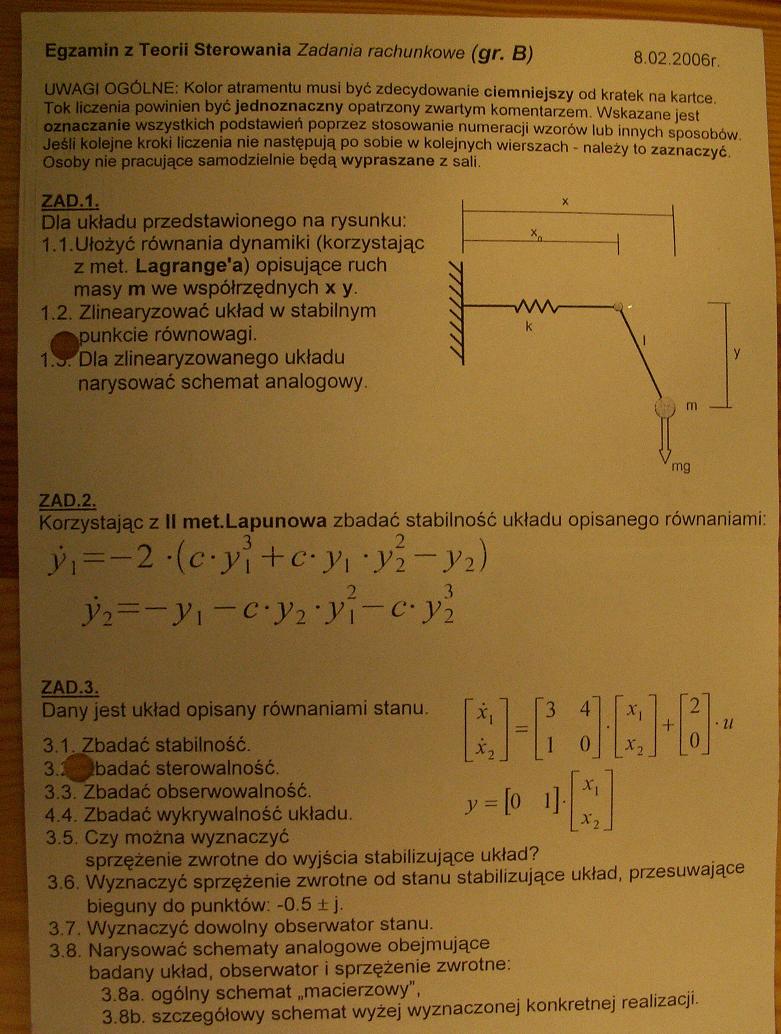
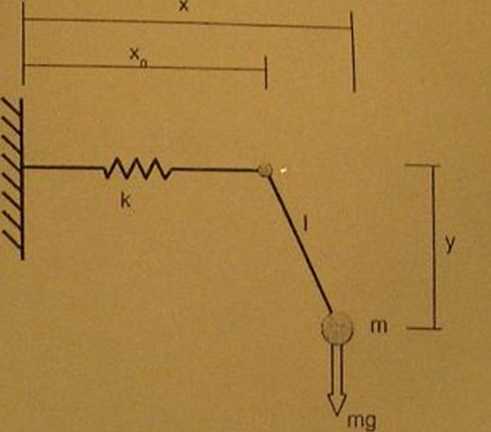
Dla układu przedstawionego na rysunku:
1.1. Ułożyć równania dynamiki (korzystając z met. Lagrange'a) opisujące ruch masy m we współrzędnych x y.
1.2. Zlinearyzować układ w stabilnym
f punkcie równowagi.
Dla zlinearyzowanego układu narysować schemat analogowy.
ZAD.2.
Korzystając z II met.Lapunowa zbadać stabilność układu opisanego równaniami:
y\=~2 -(c-y] +c-y, •y~2-y2)
y2=-y
c'y2-y\-c'y\
ZAD.3.
|
X1 |
'3 4 |
X\ |
~2 | |||
|
1 |
• | |||||
|
M. |
J 0 |
X 2 |
0 |
u
Lx2 J
Dany jest układ opisany równaniami stanu
3.1. Zbadać stabilność.
3.j^jJbadać sterowalność.
= [0 O*
y
3.3. Zbadać obserwowalność.
4.4. Zbadać wykrywalność układu.
3.5. Czy można wyznaczyć sprzężenie zwrotne do wyjścia stabilizujące układ?
3 6. Wyznaczyć sprzężenie zwrotne od stanu stabilizujące układ, przesuwające
bieguny do punktów: -0.5 ± j.
3.7. Wyznaczyć dowolny obserwator stanu.
3.8. Narysować schematy analogowe obejmujące badany układ, obserwator i sprzężenie zwrotne:
3.8a. ogólny schemat „macierzowy", „
3.8b. szczegółowy schemat wyżej wyznaczonej konkretnej res
Wyszukiwarka
Podobne podstrony:
1529819Y103225096568922598529 o EGZAMIN Z TEORII SYSTEMÓW -ZADANIA 7.02.2014. PROSZĘ UWAŻNIE PRZECZY
image2 1 jpeg Tematy egzaminacyjne z Teorii Sterowania) Część II (materiał sem VII) 1. &
EGZAMIN 08(20) Zadanie 69. Piaseczno, 02.03.2008 r. FAKTURA VAT 131/03/08 Oryginał. Kep»* SPRZEDAWCA
Egzamin z Teorii Systemów (zadania) 7 II 05 Egzamin z Teorii Systemów - Część I (zadania) - 7 lutego
8457606695592 IMGp39 Egzamin z Teorii Sterowania 2 lutego, 201 Or. /as;td: wszystk
Uwagi ogolne (sterownik skanera) Podręcznik ekranowy > Przewodnik skanowania > Uwagi ogólne (s
teoria systemow egzamin 02 2004 Egzamin z Teorii Systemów 09 lutego 2004r. Uwaga: •
Kraków, 3.02.2010 Egzamin z Teorii sygnałów - I termin Zadanie 1 Wyznacz rozwinięcie sygnału x(t)
image3 1 jpeg Tematy egzaminu poprawkowego z Teorii Sterowania Część I (materiał sem VI) 1.
img087tc1 Egzamin z teorii miary i całki. Semestr IV. Rok ak. 2006/07. Zadanie 1. (a) &n
więcej podobnych podstron