ISD strona 3
&
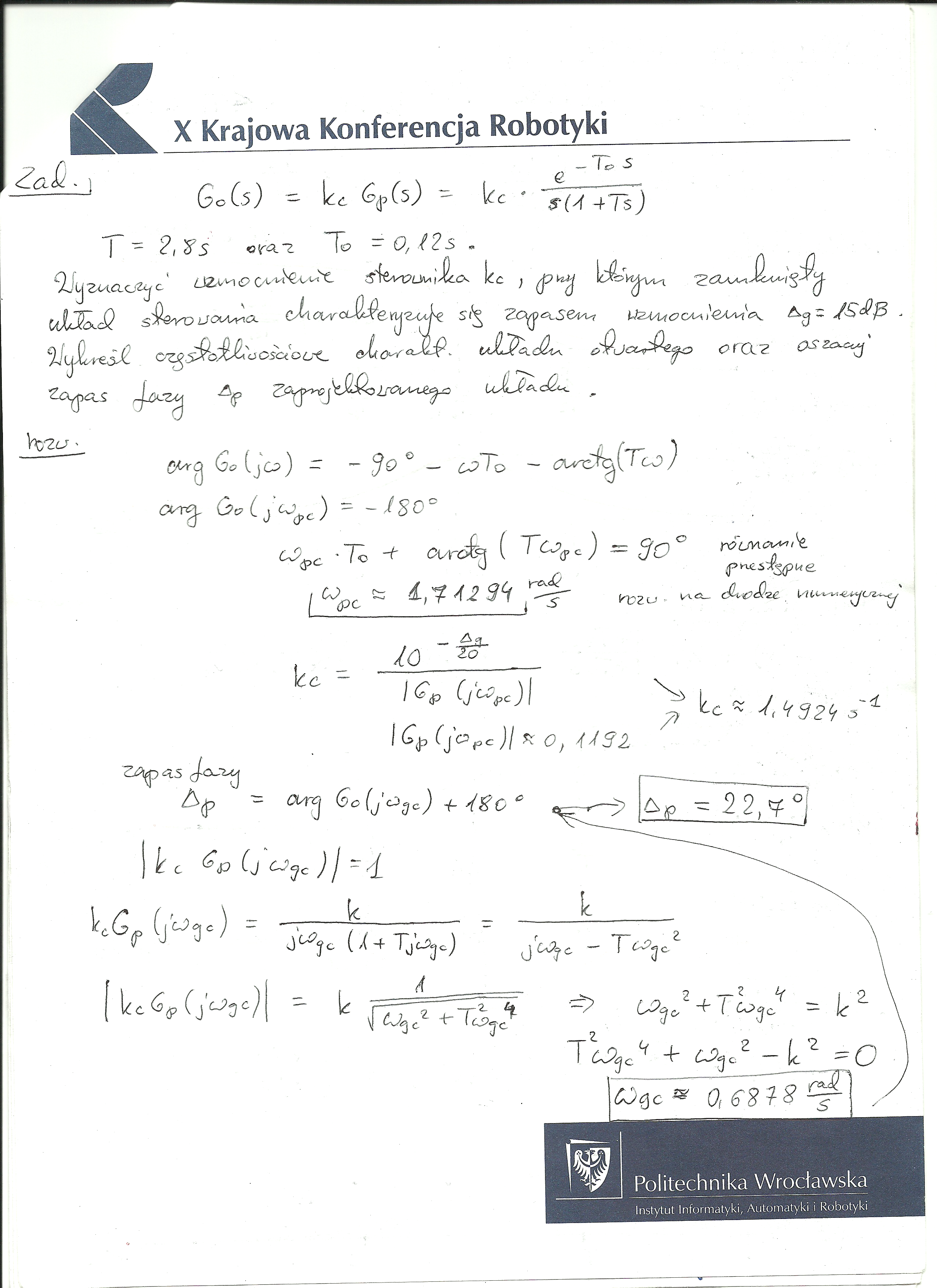
X Krajowa Konferencja Robotyki
Gai -
5
- K c - 4 / § J
1 ~ 21 S To - 0, 12S ~
{^J(j2x<aoZ^c‘ lSŁ^O 0^0^^ T^c>lma'\ALck lec )
VtJL-$ó^cQ O CKAsrt<x dl (Asy clMTź
WoWw, '^ćśLaa*^.
oOSdC(j<_ OMO^
1

(f ^
Sl^ 'ZC^^SCą^i iZzA/l4C?GO\?<ZtOć\. Ag ; j
uAJTdAu^ JcoTi^o OfOCZ OS&z-c^j
h/z
6/
ć^g <o<? (jc?) - - Jo ° — 4j>To - ćtu^£^(Tco/
^ b*LA^&c) = -^S0O
6^c -7^ + O^A ( 1 -Go0 rounc^n^t
g f^ś^spue.
e^4-i£?c02
, CJ I (PC
i,%A2 SH
£ U ■■ ó^l&ó/tzc i-A?
Ć-
t ~ -£3-
/0
/ ^<p 0 <C^«pcj|
7'
kćf(j'u3‘' -
JU??Ł T^) jC^c - T^g 7
~~ A 2,


Politechnika Wrocławska
Instytut Informatyki, Automatyki i Robotyki
Wyszukiwarka
Podobne podstrony:
ISD strona 1 r * X Krajowa Konferencja Robotykiz2fj ę aHs c^cjC1 ?***: JT o*. &g
ISD strona 5 & X Krajowa Konferencja Robotyki G(p (s) - 5((-łs)(<?+5) **)
ISD wykreślanie linii pierwiastkowych strona 3 X Krajowa Konferencja Robotyki la 5Hoicx llwu ffWuCj
ISD wykreślanie linii pierwiastkowych strona 7 X Krajowa Konferencja Robotyki fty - C5Ł-f s)0Z+5-f-
ISD wykreślanie linii pierwiastkowych strona 9 V K X Krajowa Konferencja Robotyki i ^ &
ISD wyznaczanie charakterystyki Bodego strona 3 ^ X Krajowa Konferencja Robotyki t*j S^I^Ic£k. QAJAf
ISD charakterystyka Nyquista strona 1 /STX Krajowa Konferencja Robotyki OAr« Xo leo >0 OwcX<Ą
ISD charakterystyka Nyquista strona 3 STX Krajowa Konferencja Robotykis Łioj2o^ ofi^ro^eM <kj cti
ISD wykreślanie linii pierwiastkowych strona 1 KX Krajowa Konferencja Robotyki Uvixi /pl Wci I CU j
ISD wykreślanie linii pierwiastkowych strona 5 STX Krajowa Konferencja Robotyki b) ■ GL = O.Tj %Jtj
ISD wyznaczanie charakterystyki Bodego strona 1 2MO-UZCKAJ^tGis) X Krajowa Konferencja Robotyki cLa^
Obraz9�2 X Krajowa Konferencja Robotyki W/i — Ic ? eC-tf = l G(s) -RCs) - Y(s) == /( . ^ -
13723 Obraz8�2 X Krajowa Konferencja Robotyki lllMl fVOcS^tHoU^^A (Z) CjdL
73286 Obraz8�4 X Krajowa Konferencja Robotyki Zo.^oaa)x_ i- 5Jy2MO.cetjc
75556 Obraz8�8 STX Krajowa Konferencja Robotyki iAAOcJUL. lX^a£eAA^e z-dbasic ^cJkiiLibvli) (ył^ArcJ
więcej podobnych podstron