Roboty przemysłowe egzamin 0
Efiboty. przemysłową- Egzmm26JJlJQ12X2 pyiarna. 45 minuti a
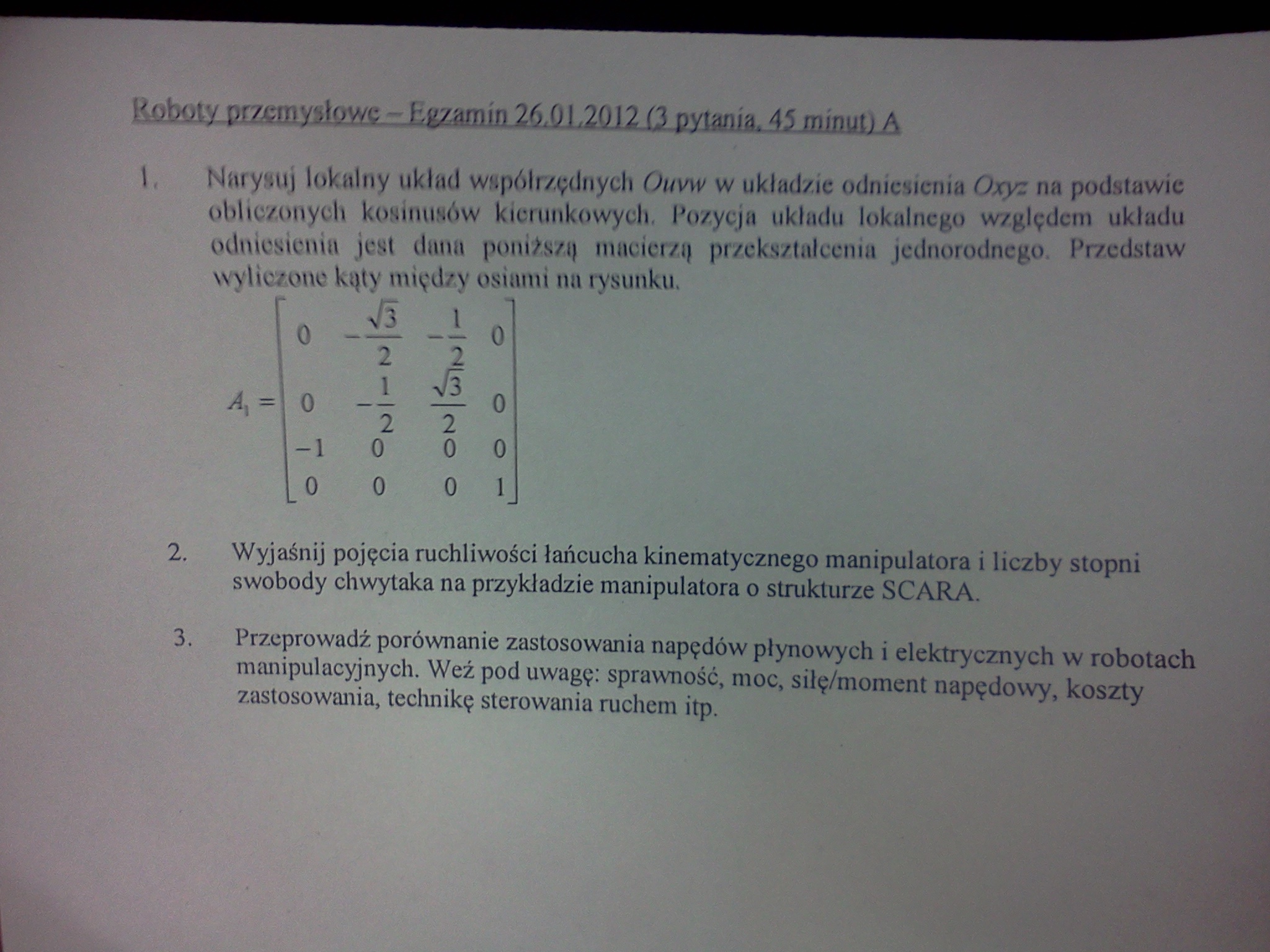
1, Nftryauj lokalny układ współrzędnych Ouvw w układ/ic odniesienia Oxyz na podstawie obliczonych leosinUSÓW kierunkowych. Pozycja układu lokalnego względem układu odniesienia jest dana poniźszi) macicrzi| przekształcenia jednorodnego. Przedstaw wyliczone kąty między osiami na rysunku.
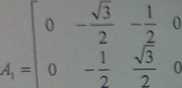
-10 0 0 0 0 0 1_
2. Wyjaśnij pojęcia ruchliwości łańcucha kinematycznego manipulatora i liczby stopni swobody chwytaka na przykładzie manipulatora o strukturze SCARA.
3. Przeprowadź porównanie zastosowania napędów płynowych i elektrycznych w robotach manipulacyjnych. Weź pod uwagę: sprawność, moc, siłę/moment napędowy, koszty zastosowania, technikę sterowania ruchem itp.
Wyszukiwarka
Podobne podstrony:
IMAG0112 (10) Roboty przemysłowe - Egzamin 26.01.2012 (3 pytania. 45 minuta B Narysuj lokalny układ
Roboty przemysłowe egzaminy Roboty przemysłowe - Egzamin 11.02.2010 (5 pytań, 60 minut) 1. &nb
Egzamin Roboty przemysłowe 24.01*2013 L Zapisz macierz przekształcenia jednorodnego, która wyraża
Roboty przemysłowe w automatyzacji odlewmctwa ciśnieniowego. Nr 11. s. 472. Ruch cen metali przemysł
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
79517 Slajd77 (9) Definicje: Mobilne roboty przemysłowe-autonomiczneprzyjmują postaćzrobotyzowanei j
Przykłady konstrukcji robotów przemysłowych 1. Wstęp Robotyka przemysłowa zajmuje się zagadnieniami
Roboty przemysłowe jako narzędzia Interpretacja systemowa różnych form pracy ludzkiej Od niepamiętny
Laboratorium Podstaw Robotyki jest wyposażone w dwa roboty przemysłowo-ednkacyjne typ L2, produkcji
2.2. Parametry opisujące manipulatory i roboty Manipulatory i roboty przemysłowe najczęściej posiada
POLITECHNIKA ŚLĄSKA MECHATRONIKA Kierunek Mechatronika S robotyka przemysłowa i
więcej podobnych podstron