instalacje119
121

4. TEORIA SILNIKA SKOKOWEGO
Na stabilność pracy silnika skokowego ma wpływ współczynnik tarcia lepkiego zastosowanej cieczy i wartość momentu bezwładności tłumika, których badaniem zajęto się w pracy [70], .i
Cechami ujemnymi tłumienia z zastosowaniem cieczy są: dodatkowe straty mocy występujące przy wszystkich prędkościach oraz możli- | wości ubytku cieczy tłumiącej. i
Pożądana wartość bezwładności zewnętrznego tłumika mechanice | nego zależy od wielu czynników, do których należą (rys. 4.14): bezwład- | ność silnika; bezwładność obciążenia odniesionego do wału silnika; tar- 1 cie obciążenia; rodzaj zastosowanego sprzęgła silnik-obciążenie; pożądana I intensywność tłumienia. Według publikacji [69] w większości przypadków M bezwładność tłumika powinna być 1,5 — 4 razy większa od bezwładności ą całego układu odniesionej do wału silnika. ''W
4.3.3. Tłumienie elektromagnetyczne 1
Tłumienie elektromagnetyczne można stosować zarówno w przy- j
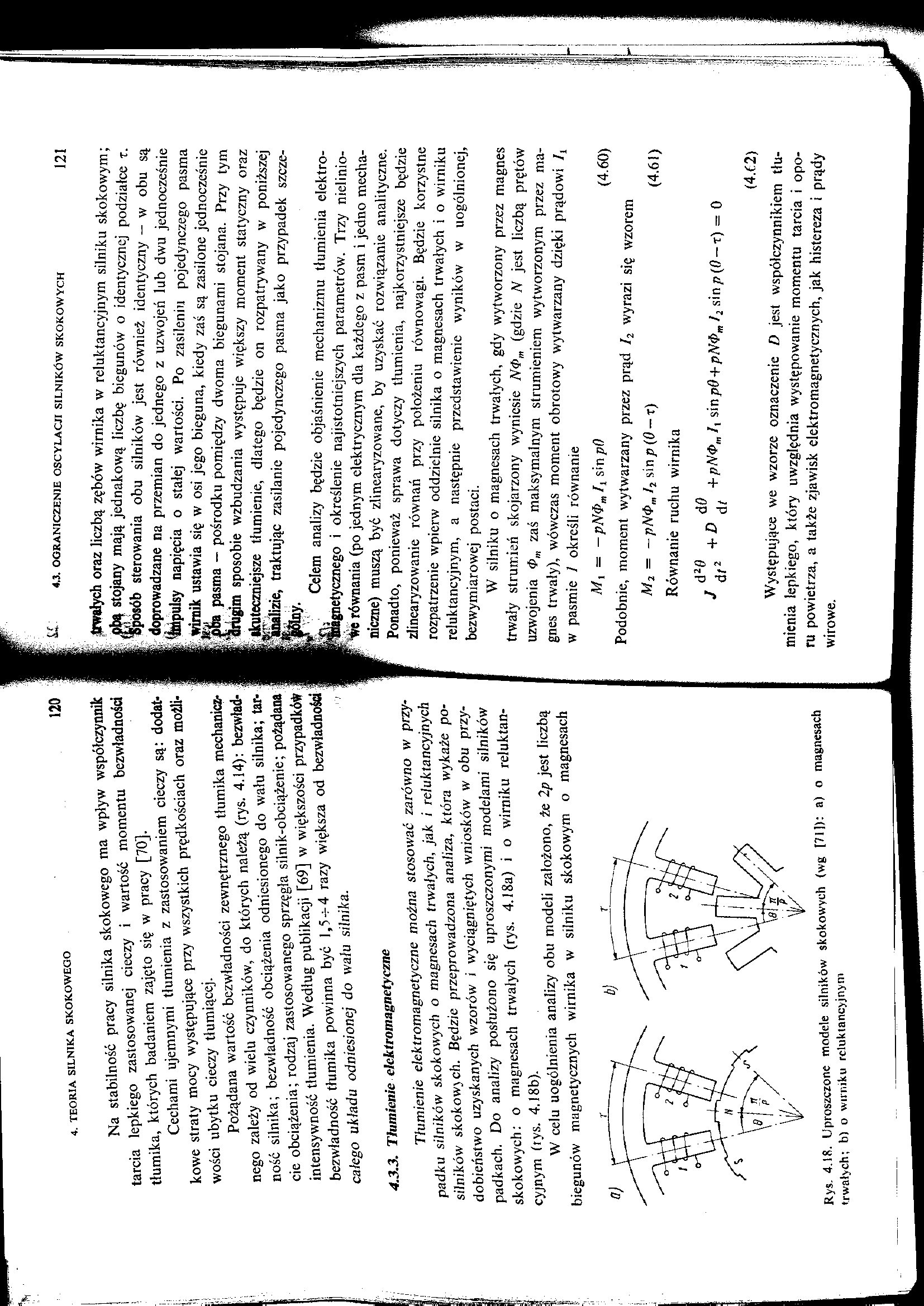
pad ku silników skokowych o magnesach trwałych, jak i reluktancyjnych j silników skokowych. Będzie przeprowadzona analiza, która wykaże po- I dobieństwo uzyskanych wzorów i wyciągniętych wniosków w obu przy- »p padkach. Do analizy posłużono się uproszczonymi modełami silników I skokowych: o magnesach trwałych (rys. 4.18a) i o wirniku reluktan- I cyjnym (rys. 4.18b). I
W celu uogólnienia analizy obu modeli założono, że 2p jest liczbą |
biegunów magnetycznych wirnika w silniku skokowym o magnesach f
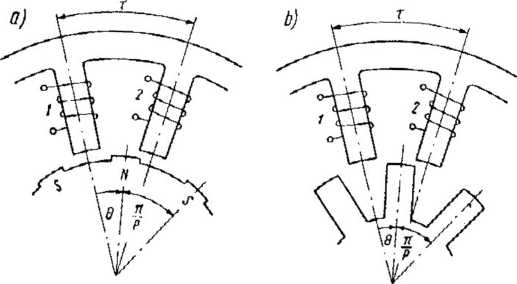
Rys. 4.18. Uproszczone modele silników skokowych (wg [71]): a) o magnesach trwałych; b) o wirniku rcluktancyjnym
Lf
4.3. OGRANICZENIE OSCYLACJI SILNIKÓW SKOKOWYCH
121
$młych oraz liczbą zębów wirnika w reluktancyjnym silniku skokowym; obą stojany mają jednakową liczbę biegunów o identycznej podziałce r. Sposób sterowania obu silników jest również identyczny — w obu są doprowadzane na przemian do jednego z uzwojeń lub dwu jednocześnie %dpulsy napięcia o stałej wartości. Po zasileniu pojedynczego pasma wirnik ustawia się w osi jego bieguna, kiedy zaś są zasilone jednocześnie |pba pasma — pośrodku pomiędzy dwoma biegunami stojana. Przy tym ydrugim sposobie wzbudzania występuje większy moment statyczny oraz jjikuteczniejsze tłumienie, dlatego będzie on rozpatrywany w poniższej alizie, traktując zasilanie pojedynczego pasma jako przypadek szczepy-
Celem analizy będzie objaśnienie mechanizmu tłumienia elektro-ignetycznego i określenie najistotniejszych parametrów. Trzy nielinio-równania (po jednym elektrycznym dla każdego z pasm i jedno mechaniczne) muszą być zlinearyzowane, by uzyskać rozwiązanie analityczne. Ponadto, ponieważ sprawa dotyczy tłumienia, najkorzystniejsze będzie zlinearyzowanie równań przy położeniu równowagi. Będzie korzystne rozpatrzenie wpierw oddzielnie silnika o magnesach trwałych i o wirniku reluktancyjnym, a następnie przedstawienie wyników w uogólnionej, bezwymiarowej postaci.
W silniku o magnesach trwałych, gdy wytworzony przez magnes trwały strumień skojarzony wyniesie N<P,„ (gdzie N jest liczbą prętów uzwojenia <Pm zaś maksymalnym strumieniem wytworzonym przez magnes trwały), wówczas moment obrotowy wytwarzany dzięki prądowi JL w paśmie 1 określi równanie
Mi — -pN^mIls\r\pO (4.60)
Podobnie, moment wytwarzany przez prąd I2 wyrazi się wzorem
M2 = ~pN4>mI2 sin/>(0-T) (4.61)
Równanie ruchu wirnika d20 d0
J dt2 dt JrpN<p"'Ix s™pO + pN4>„f2 sinp(0~r) = 0
(4.(2)
Występujące we wzorze oznaczenie D jest współczynnikiem tłumienia lepkiego, który uwzględnia występowanie momentu tarcia i oporu powietrza, a także zjawisk elektromagnetycznych, jak histereza i prądy wirowe.
Wyszukiwarka
Podobne podstrony:
instalacje119 121 4. TEORIA SILNIKA SKOKOWEGO Na stabilność pracy silnika skokowego ma wpływ współcz
g4 Efdrt ten może się utrzymywać nawet przez dziesięć łat. Czy na p<*str/cg*nic Niebie ma wpływ
spełnione oraz ze względu na fakt czy upływ czasu ma wpływ na kształt, rozmiar i wielkość świadczeni
. Na pfzebieg których z poniższych reakcji ma wpływ pH roztworu ■ 2Fe3+ + 3J-^ J2 +
WYKŁAD 2 enzymy cz 1 (26) WPŁYW TEMPERATURY NA SZYBKOSC REAKCJI ENZYMATYCZNE A Temperatura ma wpł
PYT3 3 57. Na które parametry ma wpływ współczynnik kucia (uderzenia) w obliczenia
Środowisko oddziaływuje na rodzinę tak jak rodzina ma wpływ na środowisko bliższe lub dalsze. 1.
70 Dorota Sosnowska jabłkowych. Na przebieg procesu enzymatycznego brunatnienia ma wpływ wiele czynn
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
74324 instalacje107 4. TEORIA SILNIKÓW SKOKOWYCH 96 kreskowany pomiędzy krzywymi A i B nazywa się ob
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
instalacje115 4. TEORIA SILNIKÓW SKOKOWYCH 112 Moc maksymalna występuje kiedy /? = 0, punktem pracy
14130 instalacje113 4. TEORIA SILNIKÓW SKOKOWYCH 108 pokazanego na rys. 4.7, na którym dla uproszcze
więcej podobnych podstron