2tom327

9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 656
Regulator mocy biernej baterii kondensatorów składa się zwykle z trzech członów: pomiarowego, zwłoczncgo i wykonawczego.
Człon pomiarowy mierzy wielkość przyjętą za zasadę działania regulatora i porównuje ją z wartością nastawioną. Po jej przekroczeniu przesyła impuls do członu zwłoczncgo.
Zadaniem członu zwlocznego jest uniknięcie zbędnych łączeń stopni baterii przy krótkotrwałych zmianach wielkości mierzonej oraz umożliwienie rozładowania wyłączonego stopnia baterii przed jego ponownym załączeniem. Zwłoka może trwać od kilku sekund do kilku minut.
Człon wykonawczy wysyła impuls powodujący zadziałanie wyłącznika (lub stycznika) baterii i załączenie lub wyłączenie jednego lub więcej stopni baterii wg przyjętej zasady łączeniowej.
Aby uniknąć tzw. pompowania, czyli wielokrotnego załączania lub wyłączania baterii przy oscylowaniu wartości wielkości mierzonej wokół wartości nastawionej, wysyłanie impulsu do łącznika następuje przy innej wartości po przekraczaniu jej w górę (tv(j), a innej
po przekraczaniu jej w' dół (w4). Różnica wh—jest zw'ana strefą nieczułości (lub nie-dzialania) regulatora. Stanowi ona stały parametr regulatora albo może być nastawiana.
W regulatorze reagującym na dwie wielkości, wielkość dodatkowa (zwykle napięcie lub czas) staje się nadrzędna, tzn. jeśli napięcie sieci jest wyższe od nastawionego na regulatorze, to załączenie baterii kondensatorów nie nastąpi mimo, że np. współczynnik mocy jest mniejszy od w artości zadanej.
Bateria regulowana jest podzielona na kilka członów (zwykle 3 9) o jednakowej lub różnej mocy. Łączenie członów odbywa się wg określonych zasad łączeniowych, np. 1:1:1, 1:2:2, 1:2:4 (liczby odpowiadają względnym mocom stopni), co umożliwia uzyskanie odpowiednio 3, 5 i 7 stopni mocy baterii. Według zasady 1:2:4 (przy czym Q2 — 2Q,; Qz = 42,) przy 3 członach baterii można uzyskać 7 stopni jej mocy od Ql do27 skokami co 2i-
9.4.3. Rodzaje regulatorów mocy baterii kondensatorów
Pierwsze regulatory mocy baterii kondensatorów miały mechaniczne człony zwłoczne i wykonawcze. Impulsy z członu pomiarowego (proporcjonalne do nastawionej wielkości — najczęściej cos<p) uruchamiały nawrotny silniczek synchroniczny, który — poprzez wałek z krzywkami — powodował otwieranie lub zamykanie styków rtęciowych, sterujących działaniem styczników poszczególnych członów baterii. Zegar sterujący regulatora powodował wyłączenie baterii, np. w nocy.
W latach osiemdziesiątych zaczęto stosować regulatory elektroniczne, np. eBR, przeznaczone do sieci o symetrycznym obciążeniu. Regulator taki miał 6-e9 stopni regulacji; wielkością nastawianą był cos<pM w zakresie 0,85-e- 1,0; czas zadziałania (wyczekiwania) wynosił 4, 40 lub 240 s, zaś szereg łączeniowy mocy stopni 1:1:1, 1:2:2 lub 1:2:4.
Obecnie stosuje się regulatory elektroniczne nowej generacji, w których czynności pomiaru, regulacji, sterowania i informacji są realizowane przez mikroprocesor.
Regulatory takie można stosować w sieciach trójfazowych trój- i czteroprzewodowych. Wielkością nastawianą może być tgę>, cosip, Isiiup, czas lub napięcie. Liczba stopni regulacji wynosi od 3 do 12, czas zadziałania od 1 s. Bywają wyposażone w zegar sterujący pracą baterii, blokadę uniemożliwiającą załączenie danego stopnia baterii przed jego rozładowaniem (ważne przy szybkich zmianach obciążenia biernego), sygnalizację dźwiękową lub optyczną w przypadku wzrostu napięcia ponad określoną wartość. Stan każdego członu baterii (załączenie lub wyłączenie) sygnalizują diody luminesccncyjne. Wskaźnik cyfrowy informuje o aktualnej wartości wielkości nastawionej. Regulator może współpracować z komputerem dla prowadzenia odpowiedniej statystyki. Regulatory tego typu są produkowane również w kraju.
9.5. Statyczne urządzenia do nadążnej kompensacji mocy biernej
9.5.1. Wiadomości wstępne
W statycznych kompensatorach mocy biernej zmiany parametrów kompensatorów realizuje się bezstykowo za pomocą aparatury energoelektronicznej.
Kompensatory przeznaczone do współpracy z odbiornikami wywołującymi duże i szybkozmienne obciążenia bierne dzieli się na układy o działaniu symetrycznym i niesymetrycznym. Układy o działaniu niesymetrycznym umożliwiają symetryzację prądów źródła oraz kompensację składowej symetrycznej zgodnej prądu biernego.
Zadaniem nadążnych kompensatorów obciążeń biernych jest zmniejszenie mocy pozornej pobieranej ze źródła oraz ograniczenie wahań napięcia wywołanych zmiennym w czasie obciążeniem biernym. Spośród wielu rozwiązań kompensatorów zastosowanie w przemyśle znalazły układy omówione w p. 9.5.2...9.5.5.
9.5.2. Kompensator ze stałą baterią kondensatorów i zwartym przez indukcyjność prostownikiem tyrystorowym
Na rysunku 9.7 przedstawiono uproszczony schemat statycznego kompensatora nadąż-nego, w którym do pojemnościowego prądu biernego stałych baterii kondensatorów dodaje się indukcyjny prąd bierny pobierany przez zwarty dławikiem Ld dwunastopul-sowy prostownik tyrystorowy. Dławik Ld zapewnia ciągłość prądu wyprostowanego.
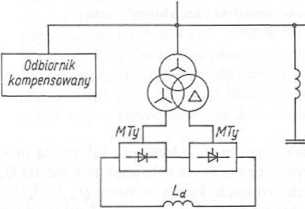
Rys. 9.7. Uproszczony schemat uniwersalnego kompensatora ze stałą baterią kondensatorów i zwartym przez dławik Ld 12-pulsowym prostownikiem tyrystorowym
Przy ciągłym prądzie wyprostowanym Jednakowych wartościach napięć zasilających oba mostki tyrystorowe MTy i jednakowych kątach opóźnienia wyzwalania tyrystorów obu mostków, prąd uzwojenia pierwotnego transformatora zawiera harmoniczne rzędu n = 1 +12k, przy czym k = 0; 2; 3;... — o względnej wartości IJI, < Mn. Podstawowa harmoniczna tego prądu, w każdej fazie, jest przesunięta w stosunku do napięcia fazowego o kąt bliski it/2.
Wartość prądu biernego jest regulowana przez zmianę średniej wartości napięcia wyprostowanego zwartego dławikiem prostownika. Napięcie to jest bardzo niskie, ze względu na małą rezystancję dławika. Regulacja napięcia odbywa się przez nieznaczne zmiany kąta opóźnienia wyzwalania tyrystorów w otoczeniu kąta a s; rt/2.
42 Poradnik inżyniera elektryka tom 2
Wyszukiwarka
Podobne podstrony:
2tom322 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 646 Rys. 9.4. Struktura regulatora RSS silnika syn
2tom326 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 654 Baterie na napięcie 6 i 10 kV mają zwykle jedn
2tom320 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 642 Zasilanie silnika przez dławik zwarciowy i spo
2tom321 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 644 Rys. 9.3. Przykładowe przebiegi prądu i napięc
2tom323 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 6489.3.2. Przebiegi łączeniowe baterii samotnych i
2tom324 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 650 Jeśli natomiast warunki te nie są spełnione, t
2tom325 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 652 Moce baterii kondensatorów nn w procentach moc
2tom328 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 658 Moc bierna kompensatora przy podstawowej harmo
2tom329 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ przez wartość amplitudową. Na rysunku 9.9 przedsta
2tom333 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 668 taki układ nazywa się filtrem, a poszczególne
2tom315 Urządzenia do kompensacji mocy biernej doc. dr inż. Zbigniew Bialkiewicz (p. 9.3.9.4,9.6 — b
2tom316 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 634 Moce te mogą być reprezentowane geometrycznie
2tom317 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 636 Z zależności (9.27) wynika, że odbiornik jedno
2tom318 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 638 W energetyce współczynnik mocy w układach trój
2tom319 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 640 gdzie: = —-^(Gab+Gbc + Gca) tg<P„. V3 przy
2tom330 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 662 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 662
2tom331 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 664 Susceptancje fazowe mogą być mierzone w każdej
2tom332 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 666 Ponieważ odkształcenie napięcia jest zwykle sp
2tom334 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 6709.6.6. Dławiki rezonansowe filtrów i ich podsta
więcej podobnych podstron