66603 str006
II)
>*,<), co, jak się okazuje, pozwala wyeliminować błąd mdi i u li śli pracujemy przy jednym położeniu koła — wpływ błędu indeksu należy uwzględnić i wartość kąta wyznaczyć ze związków (1.4) albo (1.5).
Zauważmy też, że kąta pionowego a nie należy utożsamiać z odczytami koła pionowego /.rektyfikowanego (R,. R,,), bądź niezrektyfikowanego (C)L, O,,) ani z kątami ar, obliczonymi z odczytów.
Pomiar kąta pionowego przeprowadza się w sposób następujący:
I. Nad znakiem pomiarowym centrujemy teodolit.
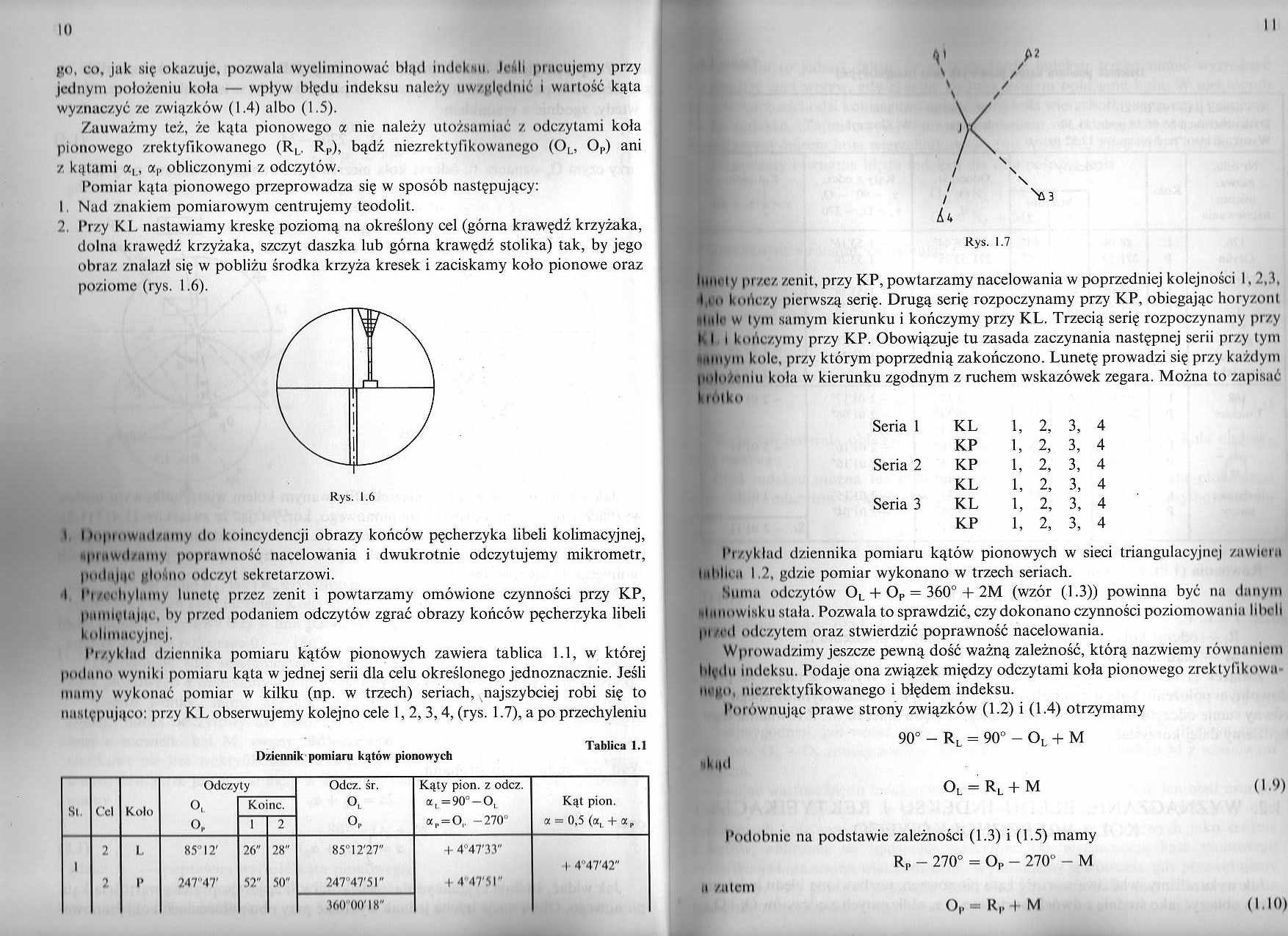
Przy KL nastawiamy kreskę poziomą na określony cel (górna krawędź krzyżaka, dolna krawędź krzyżaka, szczyt daszka lub górna krawędź stolika) tak, by jego obraz znalazł się w pobliżu środka krzyża kresek i zaciskamy koło pionowe oraz poziome (rys. 1.6).
Rys. 1.6
' I *iąuM\viid/iimv do koincydencji obrazy końców pęcherzyka libeli kolimacyjnej, <ipiuwd/nmv poprawność nacelowania i dwukrotnie odczytujemy mikrometr, podii|i|i głośno odczyt sekretarzowi.
I Pi ti 11 v lei my lunetę przez zenit i powtarzamy omówione czynności przy KP, p umęlajin . by przed podaniem odczytów zgrać obrazy końców pęcherzyka libeli I olimncyjnej.
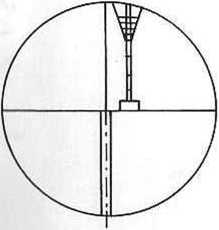
Pi/yklml dziennika pomiaru kątów pionowych zawiera tablica 1.1, w której podano wyniki pomiaru kąta w jednej serii dla celu określonego jednoznacznie. Jeśli mamy wykonać pomiar w kilku (np. w trzech) seriach, najszybciej robi się to następująco: przy K L obserwujemy kolejno cele 1,2,3,4, (rys. 1.7),apo przechyleniu
Dziennik pomiaru kątów pionowych
Tablica 1.1
|
Odczyty |
Odcz. śr. |
Kąty pion. z odcz. |
Kąt pion. | |||||
|
Si. |
Cci |
Kolo |
o, |
Koinc. |
oL |
a,=90° —0, | ||
|
o„ |
1 |
2 |
o„ |
<x,. = 0„ -270 |
a = 0.5 (a, + ap | |||
|
1 |
2 |
L |
85" 12' |
26" |
28" |
85°12'27'' |
+ 4 "47'33" |
1 4"47'42" |
|
2 |
l> |
247"47' |
52" |
50'' |
247 47'5I" |
+ 4"47'5P | ||
|
1600018" | ||||||||
Rys. 1.7
lutu i v prze/, zenit, przy KP, powtarzamy nacelowania w poprzedniej kolejności 1,2,.', I,i n Kończy pierwszą serię. Drugą serię rozpoczynamy przy KP, obiegając horyzont tlili w tym samym kierunku i kończymy przy KL. Trzecią serię rozpoczynamy przy I I i kończymy przy KP. Obowiązuje tu zasada zaczynania następnej serii przy tym imyin kole, przy którym poprzednią zakończono. Lunetę prowadzi się przy każdym |m<|i i/i-niu kola w kierunku zgodnym z ruchem wskazówek zegara. Można to zapisać k lotko
|
Seria 1 |
KL |
1, |
2, |
3, |
4 |
|
KP |
1, |
2, |
3, |
4 | |
|
Seria 2 |
KP |
1, |
2, |
3, |
4 |
|
KL |
1, |
2, |
3, |
4 | |
|
Seria 3 |
KL |
1, |
2, |
3, |
4 |
|
KP |
1, |
2, |
3, |
4 |
Przykład dziennika pomiaru kątów pionowych w sieci triangulacyjnej zawiei a tablica 1.2, gdzie pomiar wykonano w trzech seriach.
Suma odczytów 0L + Op = 360° + 2M (wzór (1.3)) powinna być na danym iimowisku stała. Pozwala to sprawdzić, czy dokonano czynności poziomowania lii m-Ii pi i d odczytem oraz stwierdzić poprawność nacelowania.
Wprowadzimy jeszcze pewną dość ważną zależność, którą nazwiemy równaniem błędu indeksu. Podaje ona związek między odczytami koła pionowego zrektylikowa In pi*, niezrektyfikowanego i błędem indeksu.
Porównując prawe strony związków (1.2) i (1.4) otrzymamy
90° - RL = 90° - Ol + M
fikt|d
Ol = Rl + M (1.9)
Podobnie na podstawie zależności (1.3) i (1.5) mamy
RP - 270° = Op - 270° - M
a zatem
O,, « Rp I M < I 10)
Wyszukiwarka
Podobne podstrony:
programowanie str 1 t bardzo fany a co najważniejsze rodzimej produkcji soft do programowania ATMe
II. Co topi się wiosną? ( kra, smalec, lód, ołów, śnieg) 12. Wymień zasady zachowa
o Biodostępność i bioaktywność - wiele testowanych środków, jak się okazuje, nie przechodzi
Występuje niby to jako partner gry, niewinny (niewinność to jak się okazuje częsta maska kata) i uda
2. Reguły działania Jak się okazuje, inżynieria socjalna posiada szeroki wachlarz zasad, gotowych
CCF20090831�102 180 Świadomość nięty — jak się okazuje — przy spokojnej jedności samego przedmiotu;
Najpopularniejsze zajęcia na UTW (w%) Jak się okazuje, wykłady są nie tylko najczęściej praktykowaną
e-BIULETYN 3/2004 Prof. dr hab. Witold Kwaśnicki Jak się okazuje, w przypadku banków wirtualnych duż
Sędzia wchodzi do pokoju Mak-Yksa wraz z nieznajomym mężczyzną- jak się okazuje jest to Szeliga- ast
DSCF0516 63 OCENA RÓŻNIC INDYWIDUALNYCH W ZAKRESIE EMPATII procesu. Jak się okazuje, rozróżnienia te
Jakość obsługi klienta w logistyce zwrotnej 211 jakim są odpady. Jak się okazuje, w Polsce istnieje
IMAG0775 (4) XLIII Do tych wielkich marzycieli .należał, jak się okazują, i Her-bart. Taką jest w et
74309 skanuj0002 (333) 102 PoltMMhlW. SgpśfaacjS’ 3.1.1. Praca i płace Najczęstszym, a jak się okazu
więcej podobnych podstron