67203 instalacje095
72
SIEROWANIE SILNIKÓW SKOKOWYCH
= O
3.2. STEROWANIE BIPOLARNE J UNIPOLARNE...
73
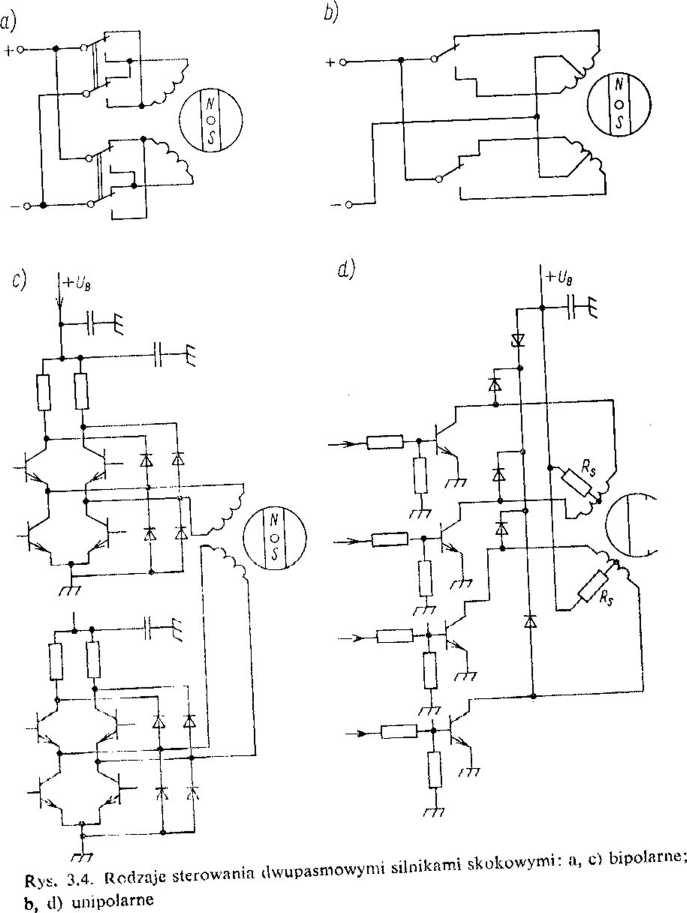
3.4c, d zaś — schematy połączeń tranzystorowej końcówki mocy przy sterowaniu bipolarnym (c) i unipolarnym (d). W pierwszym przypadku wymagane jest zastosowanie ośmiu tranzystorów mocy (dwa mostki typu H), a w drugim przypadku — tylko czterech tranzystorów mocy. Widoczne na rys. 3.4d rezystory Rs ograniczające czas narastania prądu mają istotne znaczenie dla pracy silnika, co będzie dalej wyjaśnione.
Zaletą sterowania bipolarnego jest dobre wykorzystanie momentu obrotowego dzięki temu, że cale uzwojenie jest w stanie prądowym po otrzymaniu impulsu. Wadą jest to, że zapewnienie przeciwnego zwrotu prądu w uzwojeniu wymaga aż ośmiu tranzystorów, przez co sposób ten jest bardziej kosztowny.
Zaletą wariantu unipolarnego jest prostszy układ połączeń i mniejsza liczba tranzystorów, wadą zaś to, że jednocześnie pracuje tylko połowa uzwojenia, a zatem nie wytwarza się moment obrotowy o pełnej wartości.
Od przyjętego rodzaju sterowania (bipolarne lub unipolarne) oraz od zastosowanego układu ograniczania prądu (rezystorowe lub elektroniczne) zależy przebieg charakterystyki momentu w funkcji częstotliwości skoków. Krzywe takie (/-f-4 na rys. 3.5) przedstawił H. Sax [53]. Widoczna na rysunku 3.5 oscylacja momentu (krzywa 4) jest związana ze zjawis-
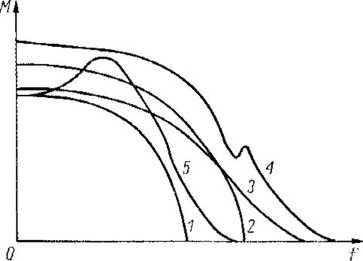
Rys. 3.5. Charakterystyki dwupasmowego silnika skokowego przy różnych rodzajach sterowania
1 — sterowanie unipolarne z rezystorem ograniczającym Rx; 2 — sterowanie bipolarne z rezystorem ograniczającym Iis\ 3 — sterowanie unipolarne, elektroniczne ograniczanie czasu narastania prądu; 4 — sterowanie bipolarne, elektroniczne ograniczanie czasu narastania prądu; 5 — sterowanie unipolarne z dodatkową rezystancją i pojemnością
Wyszukiwarka
Podobne podstrony:
3.2 Algorytmy sterowania silnikami skokowymi Sterowanie silników bipolarnych, jak i unipolarnych moż
instalacje071 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26 Zasada działania silnika skokowego
instalacje072 2. KONSTRUKCJA l WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 28 Rys. 2.5. Rozkład momentu statyczne
instalacje074 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 32 janie kilkupasmowe uzwojenie steruj
instalacje079 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 42 mieszką metali ziem rzadkich ma tec
instalacje089 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 60 Mogą być stosowane trzy rodzaje uk
instalacje090 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 62 Praca półskokowa w silnikach pięcio
instalacje091 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 64 że jedno z nich musi być łewoskrętn
instalacje119 121 4. TEORIA SILNIKA SKOKOWEGO Na stabilność pracy silnika skokowego ma wpływ współcz
instalacje134 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 148 Rys. 5.5. Szkic konstrukcyjny silnika sko
instalacje136 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 152 Rys. 5.9. Krzywe optymalnych wartości wym
instalacje138 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 156 Rys. 5.11. Szkic wymiarowy pięciopasmoweg
więcej podobnych podstron