DSC05324
5j6 • Wybrane zagadnienia geodezji w epoce GPS
Powyższe błędy średnic są podawane pracz większość producentów odbiorników GPS. Doświadczenia wykazują. Ze z powodzeniem można uzyskać wyniki, których błędy nie przekraczają podanych wartości, jeśli chodzi o wyznaczanie długości i azymutu. W przypadku rótnicy wysokości może się zdarzyć, że podana wartość błędu średniego zostanie nieznacznie przekroczona. Zalety to głównie od zakłóceń troposfcrycznych, które mogą powodować czasami znaczne efekty refrakcyjne.
Gqgłepomiary kinematyczne
Pomiary te odbywają się w czasie ruchu jednego odbiornika, podczas gdy drugi pozostaje nieruchomy. Oprócz nazwy ciągłych pomiarów kinematycznych (continous kine-maric). stosuje się w literaturze jeszcze inne nazwy dla tych pomiarów, takie jak: prawdziwe kinematyczne albo dynamiczne (tnie kinematic, dynamie).
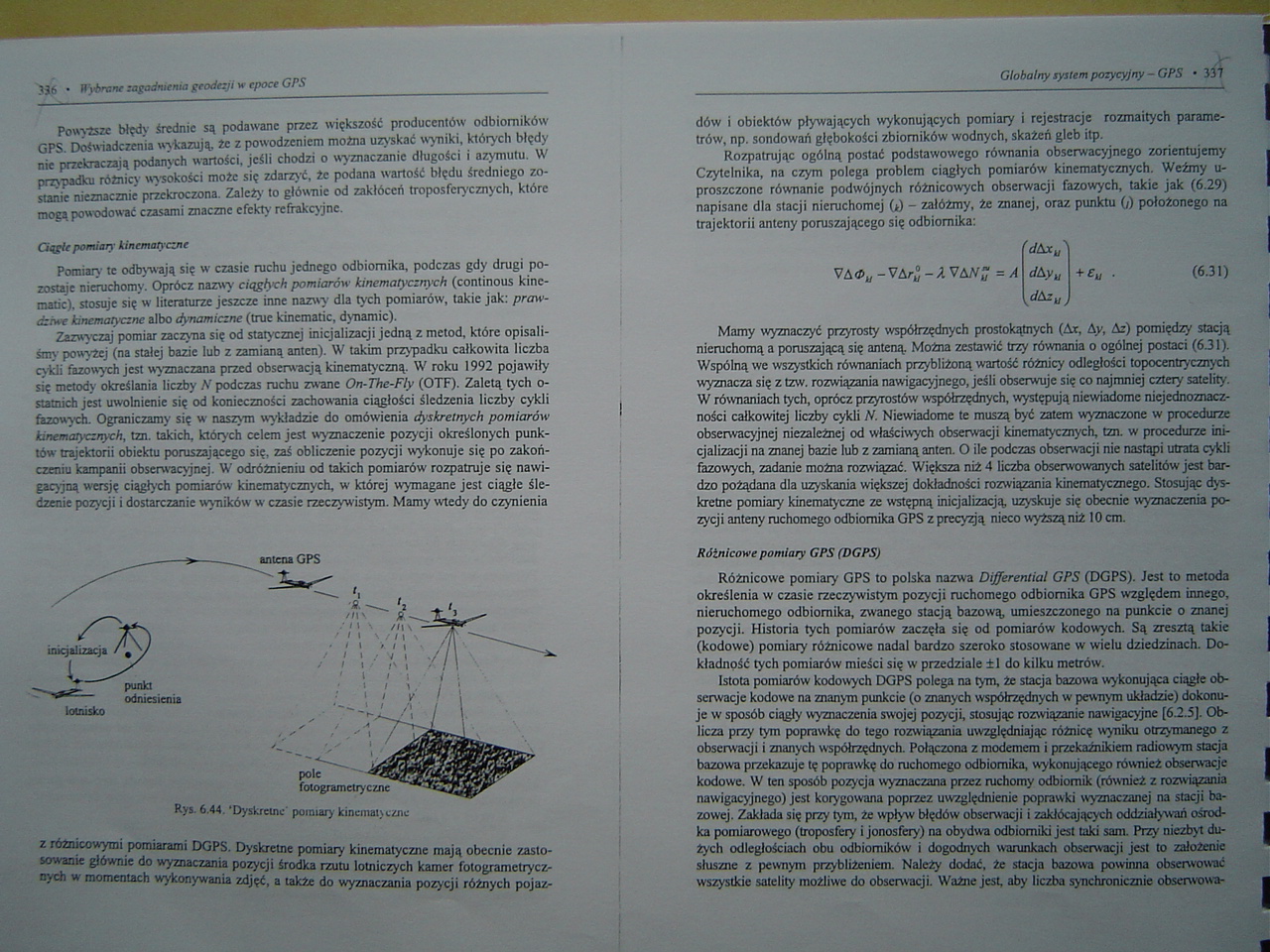
Zazwyczaj pomiar zaczyna się od statycznej inicjalizacji jedną z metod, które opisaliśmy powyżej (na stałej bazie lub z zamianą anten). W takim przypadku całkowita liczba cykli fazowych jest wyznaczana przed obserwacją kinematyczną. W roku 1992 pojawiły się metody określania liczby N podczas ruchu zwane On-The-Fty (OTF). Zaletą tych o-statnich jest uwolnienie się od konieczności zachowania ciągłości śledzenia liczby cykli fazowych. Ograniczamy się w naszym wykładzie do omówienia dyskretnych pomiarów kinematycznych, tzn. takich, których celem jest wyznaczenie pozycji określonych punktów trajektorii obiektu poruszającego się, zaś obliczenie pozycji wykonuje się po zakończeniu kampanii obserwacyjnej. W odróżnieniu od takich pomiarów rozpatruje się nawigacyjną wersję ciągłych pomiarów kinematycznych, w której wymagane jest ciągłe śledzenie pozycji i dostarczanie wyników w czasie rzeczywistym. Mamy wtedy do czynienia

Rys. 6.44. 'Dyskretne* pomiary kinematyczne
z różnicowymi pomiarami DGPS. Dyskretne pomiary kinematyczne mają obecnie zastosowanie głównie do wyznaczania pozycji środka rautu lotniczych kamer fotogrametrycznych w momentach wykonywania zdjęć, a także do wyznaczania pozycji różnych pojazr dów i obiektów pływających wykonujących pomiary i rejestracje rozmaitych parametrów, np. sondowań głębokości zbiorników wodnych, skażeń gleb itp.
Rozpatrując ogólną postać podstawowego równania obserwacyjnego zorientujemy Czytelnika, na czym polega problem ciągłych pomiarów kinematycznych. Weźmy u-proszczone równanie podwójnych różnicowych obserwacji fazowych, takie jak (6.29) napisane dla stacji nieruchomej (*) - załóżmy, że znanej, oraz punktu (/) położonego na trajektorii anteny poruszającego się odbiornika:
VAd>* VA/£ -X = A
(631)
Mamy wyznaczyć przyrosty współrzędnych prostokątnych (Ar, Ay. Ar) pomiędzy stacją nieruchomą a poruszającą się anteną. Można zestawić trzy równania o ogólnej postaci (631). Wspólną we wszystkich równaniach przybliżoną wartość różnicy odległości topocentrycznych wyznacza się z tzw. rozwiązania nawigacyjnego, jeśli obserwuje się co najmniej cztery satelity. W równaniach tych, oprócz przyrostów współrzędnych, występują niewiadome niejednoznaczności całkowitej liczby cykli W. Niewiadome te muszą być zatem wyznaczone w procedurze obserwacyjnej niezależnej od właściwych obserwacji kinematycznych, tzn. w procedurze inicjał izacj i na znanej bazie lub z zamianą anten. O ile podczas obserwacji nie nastąpi utrata cykli fazowych, zadanie można rozwiązać. Większa niż 4 liczba obserwowanych satelitów jest bardzo pożądana dla uzyskania większej dokładności rozwiązania kinematycznego. Stosując dyskretne pomiary kinematyczne ze wstępną inicjał izacją, uzyskuje się obecnie wyznaczenia pozycji anteny ruchomego odbiornika GPS z precyzją nieco wyższą niż 10 cm.
Rótnlcowc pomiary GPS (DGPS)
Różnicowe pomiary GPS to polska nazwa Differential GPS (DGPS). Jest to metoda określenia w czasie rzeczywistym pozycji ruchomego odbiornika GPS względem innego, nieruchomego odbiornika, zwanego stacją bazową, umieszczonego na punkcie o znanej pozycji. Historia tych pomiarów zaczęła się od pomiarów kodowych. Są zresztą takie (kodowe) pomiary różnicowe nadal bardzo szeroko stosowane w wielu dziedzinach. Do-kładnpść tych pomiarów mieści się w przedziale ±1 do kilku metrów.
Istota pomiarów kodowych DGPS polega na tym, że stacja bazowa wykonująca ciągłe obserwacje kodowe na znanym punkcie (o znanych współrzędnych w pewnym układzie) dokonuje w sposób ciągły wyznaczenia swojej pozycji, stosując rozwiązanie nawigacyjne (6.2.5). Oblicza przy tym poprawkę do tego rozwiązania uwzględniając różnicę wyniku otrzymanego z obserwacji i znanych współrzędnych. Połączona z modemem i przekaźnikiem radiowym stacja bazowa przekazuje tę poprawkę do ruchomego odbiornika, wykonującego również obserwacje kodowe. W ten sposób pozycja wyznaczana przez ruchomy odbiornik (również z rozwiązania nawigacyjnego) jest korygowana poprzez uwzględnienie poprawki wyznaczanej na stacji bazowej. Zakłada się przy tym, że wpływ błędów obserwacji i zakłócających oddziaływań ośrodka pomiarowego (troposfery i jonosfery) na obydwa odbiorniki jest taki sam. Przy niezbyt dużych odległościach obu odbiorników i dogodnych warunkach obserwacji jest to założenie słuszne z pewnym przybliżeniem. Należy dodać, że stacja bazowa powinna obserwować wszystkie satelity możliwe do obserwacji. Ważne jest, aby liczba synchronicznie obserwowa-
Wyszukiwarka
Podobne podstrony:
DSC05320 ■■■■■■■■■■■■i 328 * Wybrane zagadnienia geodezji w epoce GPS Na rysunku 6.38
DSC05321 3 5fk • Wybrane zagadnienia geodezji w epoce GPS Podajemy wartości odnoszące się do klasycz
DSC05329 - 346 • Wybrane zagadnienia geodezji w epoce GPS porządek w nagłówkach rekordów, pominięte
DSC05319 3^<T • Wybrane zagadnienia geodezji w epoce GPS Przytoczymy niżej pewne charakterystyki
DSC05315 314 • liytaimr zagadnienia geodezji w epoce GPS ni H4 = 40136 +148.72(7*-237J6)m, H, • llOO
DSC05318 334 * ffyitrone zagadnienia geodezji w epoce GPS wersji tego podejścia (ISAST) poszukuje si
DSC05325 3m • HSłwif zagadnienia geodezji w epoce GPS nych satelitów przez obydwa odbiorniki była ja
DSC05326 340 • Wyfcrcw zagadnienia geodezji w epoce GPS gdy się zatrzymują, wynosi wspomnianą wyżej
Zdjęcie 0117 346 • Wybrane zagadnienia geodezji w epoce GPS porządek w nagłówkach rekordów, pominięt
DSC05313 • HSóranr zagadnienia geodezji w epoce GPS dla pseudoodległości. Należy zauważyć, że w tym
DSC05316 Wittom zagadnienia geodezji w epoce GPS przy czym -40.3 jest pewną stałą, zaś (TEC) - TotoI
DSC05328 3*4 • łtytazrw zagadnienia geodezji w epoce GPS Złożoność problemu ukazała się w całej kras
DSC05312 304 • U )ł>n>ne zcgaJnwua geodezji w epoce GPS - poprawki jooosfery
DSC05314 ?0S • Wybrane zsgadmema geodezji * epoce GTS tworząc różnicę dwóch wzorów o postaci (6.18),
DSC05327 342 * Hyóranr zagadnienia geodezji w epoce GrS (multipath) i odbicia sygnałów pochodzących
DSC05322 Htbrcne zagodmerua geodezji w epoce GPS współpracuje z oprogramowaniem TRJMFEC Plus. Działa
35 (311) 2. WYBRANE ZAGADNIENIA Z GEODEZYJNYCH POMIARÓW REALIZACYJNYCH 2.1. WPROWADZENIE Geodezyjna
więcej podobnych podstron