DSC05322
Htbrcne zagodmerua geodezji w epoce GPS
współpracuje z oprogramowaniem TRJMFEC Plus. Działanie programu W A VE omówimy nieco szerzej. W algotytmie W A VE można wyodrębnić następujące etapy:
1. Wyznaczenie składowych mierzonego wektora na podstawie opracowania różnicowych obserwacji pseudobdległoścL
2. Włączenie składowych wektora i wszystkich informacji statystycznych, pochodzących z różnicowego rozwiązania kodowego jako wyjściowych informacji dla opracowania 'szerokiej ścieżki' podwójnych różnic pomiarów (azowych (zob. [6.2.7]).
3. Na podstawie wyrównania kombinacji ‘szerokiej ścieżki* pomiarów fazowych i formalnej analizy statystycznej wyników rozpoczyna się proces ustalania zakresu (granic) zbioru poszukiwań niejednoznaczności ‘szerokiej ścieżki*.
4. Wyświetla się wyznaczoną wartość całkowitej liczby cykli fazowych ‘szerokiej ścieżki', jeśli tylko było możliwe statystyczne wyróżnienie takiej wartości spośród innych rozwiązań.
5. W przypadku pozytywnego wyniku poszukiwań liczby N w procedurze 'szerokiej ścieżki' rozpoczyna się poszukiwanie odpowiedniej niejednoznaczności dla 'wąskiej ścieżki'. Wykorzystanie zależności parzystości i nieparzystości pomiędzy niejednoznacznościami ‘szerokiej ścieżki' i ‘wąskiej ścieżki’ umożliwia podwojenie długości fali ‘wąskiej ścieżki’ do około 21 cm, co znacznie zmniejsza liczbę kombinacji w czasie poszukiwań, a tym samym zwiększa efektywność algorytmu.
6. Przeprowadzenie testów statystycznych, mających na celu sprawdzenie poprawności wyznaczenia nieoznaczoności fazowej ‘wąskiej ścieżki'.
7. Po uzyskaniu poprawnych (sprawdzonych) wartości niejednoznaczności fazowych dla obu ścieżek: ‘szerokiej' i ‘wąskiej’ następuje wyznaczenie optymalnych składowych wektora za pomocą kombinacji liniowych ‘wąskiej ścieżki’ w przypadku krótkich wektorów, lub za pomocą kombinacji liniowych ‘wolnych od wpływów jonosfery’ (iono-free) dla wektorów długich.
Rapid Stolic jest nieco inną metodą tych samych szybkich pomiarów statycznych. Wymagania stawiane odbiornikom GPS są w przypadku Rapid Static takie same, jak w FastStatic. Mamy również cztery wielkości obserwowane, tzn. pomiary fazowe na obu częstotliwościach i pomiary kodowe kodów P i CJA. Różnice obu procedur tkwią głównie w różnych podejściach do wyznaczania całkowitej liczby cykli fazowych. W procedurze Rapid Static stosuje się, oprócz wyżej wspomnianych algorytmów AFM, LSAST, tzw. algorytm FARA (Fast Ambiguity Resolulion Approach). Procedura Rapid Static jest związana z kartą komputerową GPSCard™, która stanowi - wraz ze specjalną anteną - odbiornik GPS kanadyjskiej firmy NovAtel (zob. [6.2.3]). Oprogramowanie metody Rapid Static weszło na rynek w pierwszej połowie roku 1992 (tochapelle i Ul, 1992).
Wybaczanie całkowitej Uczbf cykli fazowych w procesie obserwacji
Zanim przejdziemy do omówienia metod kinematycznych, wyjaśnimy, na czym polegają obserwacyjne metody wyznaczania liczby cykli fazowych. Czynności pomiarowe z tym związane z reguły poprzedzają właściwe obserwacje częściowo-kinematyczne i kinematyczne.
Podstawowe, a jednocześnie najprostsze podejścia obserwacyjne do wyznaczenia liczby cykli fazowych są stosowane w metodach częściowokinematycznych i polegają na wykonaniu pewnych specjalnych obserwacji:
- wykonanie pomiarów na znanej bazie,
— wykonanie pomiarów z zamianą anten (antenna swap).
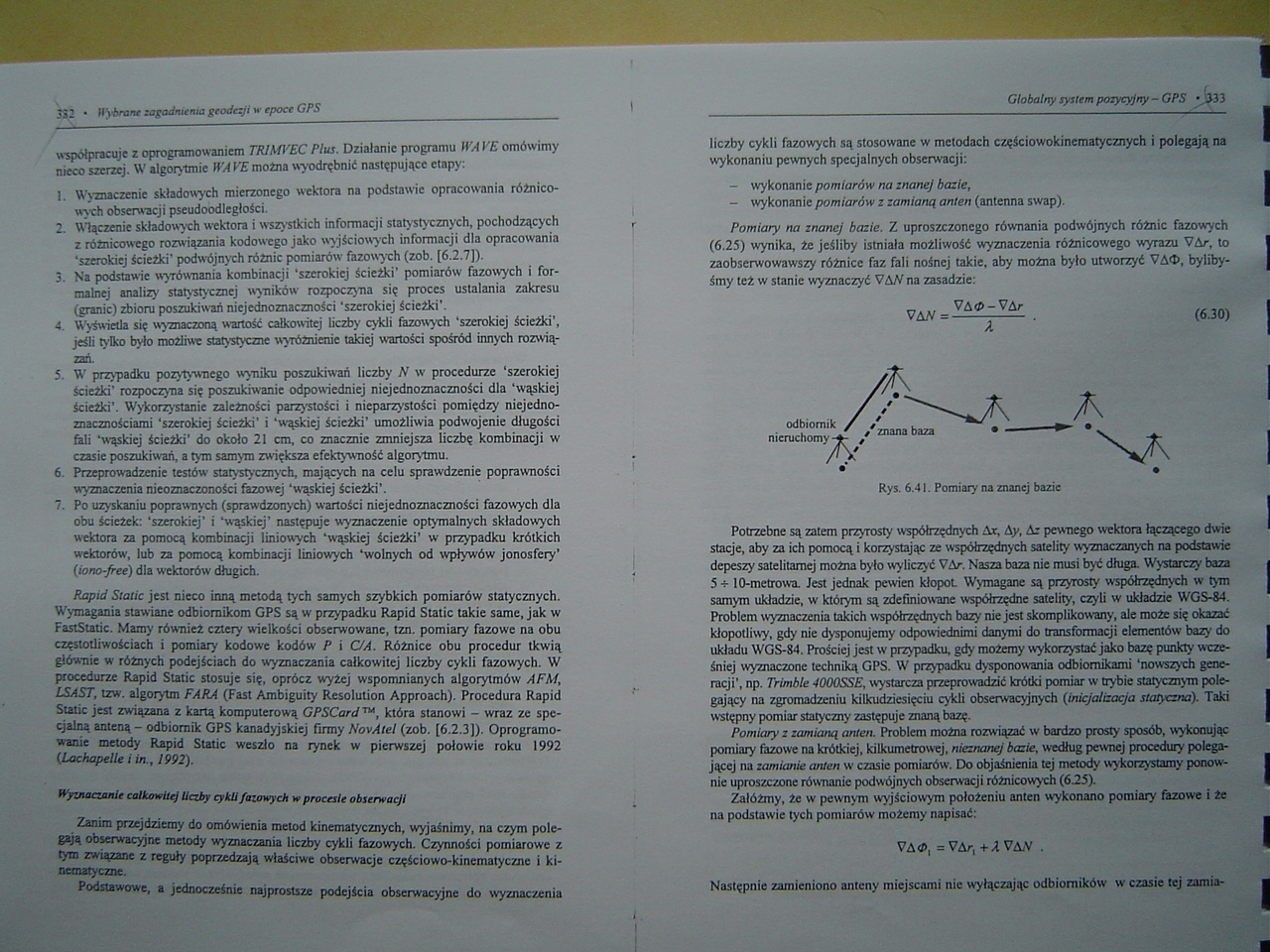
Pomiary na znanej bazie. Z uproszczonego równania podwójnych różnic fazowych (6.25) wynika, że jeśliby istniała możliwość wyznaczenia różnicowego wyrazu VAr, to zaobserwowawszy różnice faz fali nośnej takie, aby można było utworzyć VAO, bylibyśmy też w stanie wyznaczyć VAiV na zasadzie:
. (6-30)
A

Rys. 6.41. Pomiaiy na znanej bazie
Potrzebne są zatem przyrosty współrzędnych Az, Ay. Ar pewnego wektora łączącego dwie stacje, aby za ich pomocą i korzystając ze współrzędnych satelity wyznaczanych na podstawie depeszy satelitarnej można było wyliczyć VAr. Nasza baza nie musi być długa. Wystarczy baza 5 + 10-mctrowa. Jest jednak pewien kłopot. Wymagane są przyrosty współrzędnych w tym samym układzie, w którym są zdefiniowane współrzędne satelity, czyli w układzie WGS-84. Problem wyznaczenia takich współrzędnych bazy nie jest skomplikowany, ale może się okazać kłopotliwy, gdy nie dysponujemy odpowiednimi danymi do transformacji elementów bazy do układu WGS-84. Prościej jest w przypadku, gdy możemy wykorzystać jako bazę punkty wcześniej wyznaczone techniką GPS. W przypadku dysponowania odbiornikami 'nowszych generacji’, np. Trimble 4000SSE, wystarcza przeprowadzić krótki pomiar w trybie statycznym polegający na zgromadzeniu kilkudziesięciu cykli obserwacyjnych {inicjalizacja statyczna). Taki wstępny pomiar statyczny zastępuje znaną bazę.
Pomiary z zamianą anten. Problem można rozwiązać w bardzo prosty sposób, wykonując pomiary fazowe na krótkiej, kilkumetrowej, nieznanej bazie, według pewnej procedury polegającej na zamianie anten w czasie pomiarów. Do objaśnienia tej metody wykorzystamy ponownie uproszczone równanie podwójnych obserwacji różnicowych (625).
Załóżmy, że w pewnym wyjściowym położeniu anten wykonano pomioty fazowe i że na podstawie tych pomiarów możemy napisać:
VAd>, = VĄr| +2 VAJV .
Następnie zamieniono anteny miejscami nie wyłączając odbiorników w czasie tej zamia-
Wyszukiwarka
Podobne podstrony:
DSC05313 • HSóranr zagadnienia geodezji w epoce GPS dla pseudoodległości. Należy zauważyć, że w tym
DSC05316 Wittom zagadnienia geodezji w epoce GPS przy czym -40.3 jest pewną stałą, zaś (TEC) - TotoI
DSC05319 3^<T • Wybrane zagadnienia geodezji w epoce GPS Przytoczymy niżej pewne charakterystyki
DSC05328 3*4 • łtytazrw zagadnienia geodezji w epoce GPS Złożoność problemu ukazała się w całej kras
DSC05324 5j6 • Wybrane zagadnienia geodezji w epoce GPS Powyższe błędy średnic są podawane pracz wię
DSC05312 304 • U )ł>n>ne zcgaJnwua geodezji w epoce GPS - poprawki jooosfery
DSC05315 314 • liytaimr zagadnienia geodezji w epoce GPS ni H4 = 40136 +148.72(7*-237J6)m, H, • llOO
DSC05318 334 * ffyitrone zagadnienia geodezji w epoce GPS wersji tego podejścia (ISAST) poszukuje si
DSC05320 ■■■■■■■■■■■■i 328 * Wybrane zagadnienia geodezji w epoce GPS Na rysunku 6.38
DSC05321 3 5fk • Wybrane zagadnienia geodezji w epoce GPS Podajemy wartości odnoszące się do klasycz
DSC05325 3m • HSłwif zagadnienia geodezji w epoce GPS nych satelitów przez obydwa odbiorniki była ja
DSC05326 340 • Wyfcrcw zagadnienia geodezji w epoce GPS gdy się zatrzymują, wynosi wspomnianą wyżej
DSC05329 - 346 • Wybrane zagadnienia geodezji w epoce GPS porządek w nagłówkach rekordów, pominięte
DSC05323 • tfyram zafodwnia ftodezji w epoce GPS oy, a potem wykonano znów pomiary fazowe do tych sa
Zdjęcie 0117 346 • Wybrane zagadnienia geodezji w epoce GPS porządek w nagłówkach rekordów, pominięt
DSC05314 ?0S • Wybrane zsgadmema geodezji * epoce GTS tworząc różnicę dwóch wzorów o postaci (6.18),
DSC05327 342 * Hyóranr zagadnienia geodezji w epoce GrS (multipath) i odbicia sygnałów pochodzących
więcej podobnych podstron