273 (13)
14. Żegluga w warunkach zakłóceń zewnętrznych 273
3. Namiary |°]
NR
NM
NK
NŻ 4 KK
4 KK,
4 KK,* NR,
8
d
5V
cp
cp,
a
P
y = a + p s{k/2)
Namiar rzeczywisty (lnie bearing)
Namiar magnetyczny (magnetic bearing)
Namiar kompasowy (compass bearing)
(kompasu magnetycznego)
Namiar żyrokompasowy (gyro bearing)
Namiar względny (relative bearing)
(kąt kursowy)
Radarowy namiar względny (relalive radar bearing) (radarowy kąt kursowy)
Poprawiony kąt kursowy (corrected relative bearing) Rzeczywisty namiar radarowy {true tradar bearing)
4. Poprawki urządzeń nawigacyjnych
Dewiacja kompasu magnetycznego (deviation)
Deklinacja magnetyczna (magnetic rariation)
Poprawka prędkościowa żyrokompasu (speed error correction)
Całkowita poprawka kompasu magnetycznego (compass error correction)
Całkowita poprawka żyrokompasu (gyro error correction) Poprawka na dryf (leeway correction)
Poprawka na prąd (correction for current)
Poprawka na całkowity znos (leeway and current correction angle)
Poprawka na radiodewiację (radiodeeiation)
Poprawka loksodromiczna (ha!f-convergency)


f

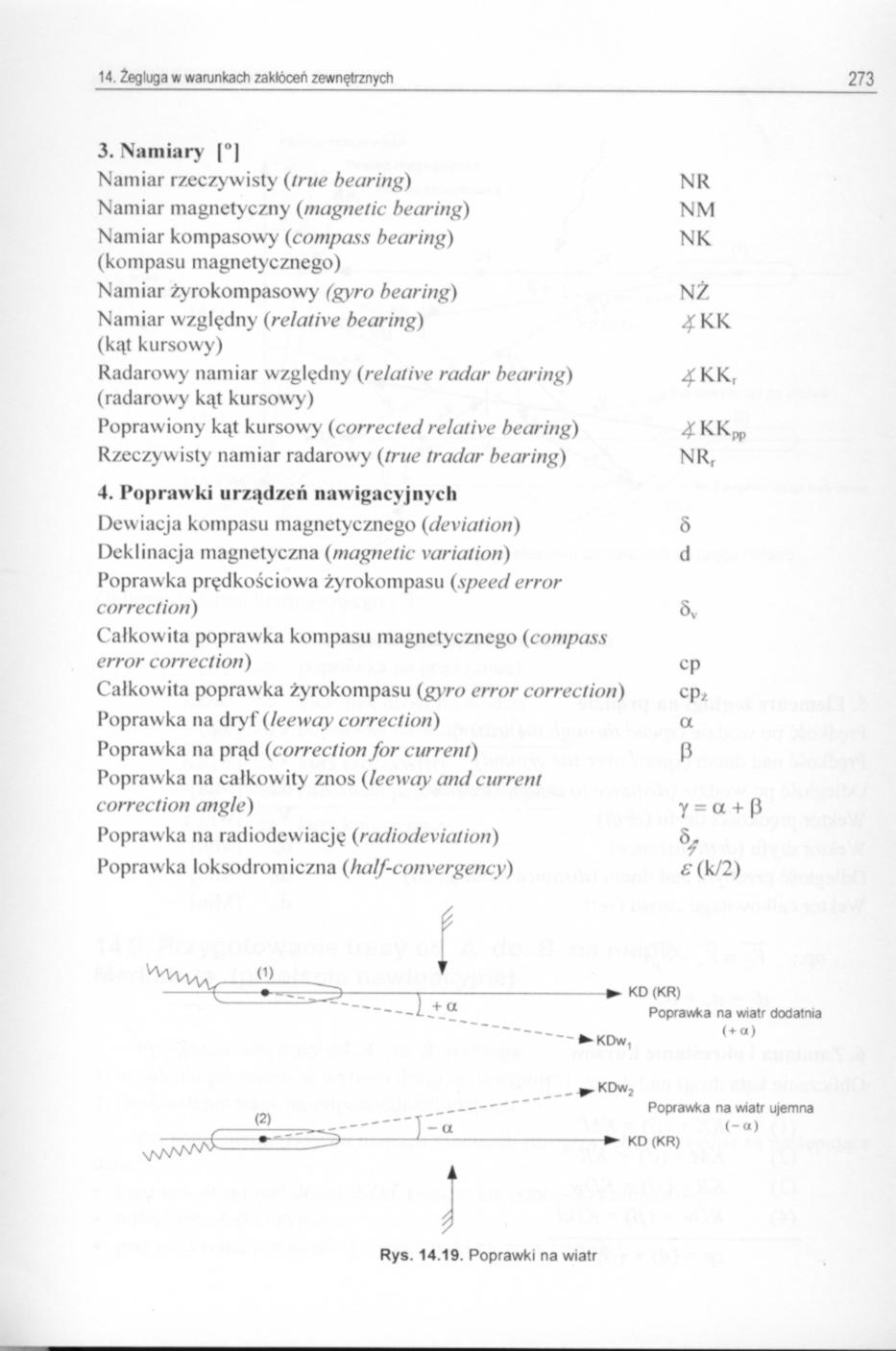
► KO (KR)
Poprawka na wiatr dodatnia
(♦a)
■ KDw
__ ^ KDw,
(2)
Poprawka na wiatr ujemna
(-a)
-► KO (KR)
Rys. 14.19. Poprawki na wiatr
Wyszukiwarka
Podobne podstrony:
269 (13) 14 Żegluga w warunkach zakłóceń zewnętrznych 269 Przeciwdziałanie zewnętrznym zakłóceniom w
271 (12) 14. Żegluga w warunkach zakłóceń zewnętrznych 271Na rysunku 14.17 pokazano zmiany poprawek
259 (11) 14 Żegluga w warunkach zakłóceń zewnętrznych 259 Rys. 14.2. Układ środków bocznego oporu wo
261 (12) 14 Żegluga w warunkach zakłóceń zewnętrznych 261 Jedna z metod praktycznych polega na oceni
263 (12) 14 Żegluga w warunkach zakłóceń zewnętrznych 263 Inny. niżej podany wzór empiryczny nie ma
265 (12) 14 Żegluga w warunkach zakłóceń zewnętrznych 265 Sposób konstrukcji na mapie tego wariantu
267 (13) 14. Żegluga w warunkach zakiocen zewnętrznych 267 Po przekształceniu uzyskamy zależność na
275 (12) 14.2egluga w warunkach zakłóceń zewnętrznych 275 Północ rzeczywista Rys. 14.21. Przykład ru
258 (15) 14. ŻEGLUGA W WARUNKACH ZAKŁÓCEŃZEWNĘTRZNYCH 14.1. Wpływ wiatru na statek Statek, jako obie
277 (19) Żołądek 277 Mięśniówka żołądka, warstwa zewnętrzna - widok od przodu. 13 14 Mięśniówka
Rysunek 13 Kształt kajaku w programie COMSOL. Rysunek 14 Ustalenie warunków początkowych.
3(17) &. . yt Rys. 13.14. Tcnsometr o wymiarach zewnętrznych 9,8 x 4.6 mm. Czujnik przykle
Nowy 3 2 Ryc. 21.13. Precesja momentu magnetycznego //. Energia Ryc. 21.14. Precesje momentów pędu w
17. MODELE MATERIAŁÓW W wykładach numer 13 i 14 zostały omówione równania fizyczne dla materiału
więcej podobnych podstron