419
9.5. ZASTOSOWANIA SYSTEMU MIKROPROCESOROWEGO 419
Sposób rozwiązania określonego problemu sterowania zależy od inwencji konstruktora formułującego algorytm i program sterujący, od których w znacznym stopniu zależy również wyposażenie sprzętowe systemu.
Jak już wspomniano, niemal wszystkie obecnie budowane urządzenia energoelektroniczne są wyposażone w mikroprocesorowe systemy sterujące, przy czym istnieją tendencje unifikacji sprzętowej. W zakresie oprogramowania (ang. software) obserwuje się natomiast ciągły rozwój, zmierzający do lepszego wykorzystania sprzętu, zwiększenia dokładności i niezawodności pracy.
Jako przykład jednej z możliwych realizacji sterowania napędu z napięciowym przemiennikiem częstotliwości zostanie przytoczone rozwiązanie z procesorem sygnałowym (Motorola 56000) zaprojektowane w Norwegian Institute of Technologie [114] (rys. 9.5 i 9.6).
Zmierzone wartości napięć przewodowych (uab, ubc) oraz prądów fazowych (;ias, ibs) są próbkowane przez przetwornik analogowo-cyfrowy. Strumień stojana, częstotliwość poślizgu i prędkość obrotowa wirnika są obliczane z ww. wielkości zmiennych. Regulacja prędkości i strumienia jest prowadzona w dwufazowym układzie współrzędnych p-q.
Regulator PI generuje wartość odniesienia w torze regulacji napięcia (strumienia) w układzie współrzędnych p-q i jest ona następnie transformowana do układu współrzędnych oc-jS. Modulator wartości impulsów wykorzystujący wektor przestrzenny napięcia określa dwa sterujące niezerowe wektory, odpowiednio do sygnałów napięcia we współrzędnych a-/?. Informacje te są wprowadzane do licznika programowanego, generującego sygnały sterujące łącznikami falownika. Jako łączniki zostały zastosowane tranzystory BJT o znamionowej częstotliwości przełączeń 2 kHz. Okres przełączeń PWM wybrano równy 250 ps, tzn. odpowiadający połowie częstotliwości znamionowej tranzystorów.
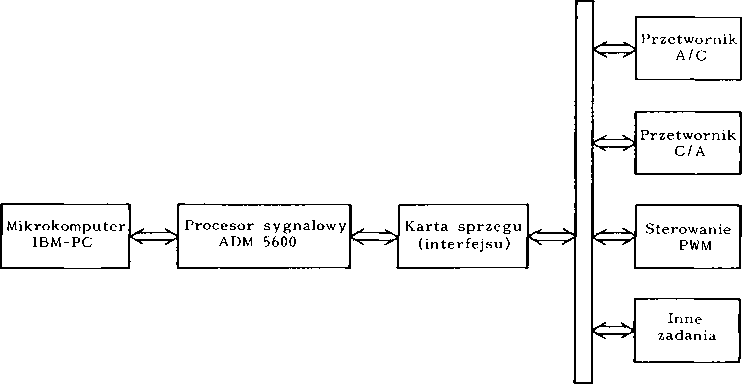
Rys. 9.6. Struktura systemu z procesorem sygnałowym Zaczerpnięto z [114]
27*
Wyszukiwarka
Podobne podstrony:
9.5. ZASTOSOWANIA SYSTEMU MIKROPROCESOROWEGO 421 Strumień magnetyczny silnika jest określany przez c
?egna?ek 0 ISO cyjiKj jest rozwiązanie określonego problemu, a metody dramy - oddziaływanie na emocj
Zastosowanie nowoczesnych metod TI do rozwiązywania codziennych problemów Podaje kilka przykładów
Scan14 (3) • sposób rozwiązywania, aby problemy te przezwyciężyć jest potrzebna możliwie ścisła i sz
skanuj0013 (365) sposób rozwiązać swych problemów w dotychczasowych ramach odniesienia. Cohen wprowa
Skan 141011 (8) zróżnicowanie zaleceń dotyczących rozwiązania określonego problemu.Kierunek
Wymyślanie rozwiązań do rozwiązania określonych problemów to proces heurystyczny który przebiega wed
Scan14 (3) • sposób rozwiązywania, aby problemy te przezwyciężyć jest potrzebna możliwie ścisła i sz
2009-04-19ALGORYTM Algorytm, dokładny przepis podający sposób rozwiązania określonego zadania w
Algorytm Przepis na rozwiązanie określonego problemu za pomocą prostych czynności wykonywanych w
Władysław Kobyliński Poszukując sposobów rozwiązania tego problemu coraz częściej odwoływano się do
DSC06384 (4) nającego do rozwiązania określonego problemu naukowego2 6. Bardzo uproszczoną definicję
074 pcx 74 Bezprzewodowe sieci komputerowe cym sposobem rozwiązania tego problemu jest tworzenie sie
Poszukiwanie informacji przydatnych w rozwiązywaniu określonego problemu: • Uwaga
3 Rozwiązywanie problemów Ta część zawiera sposoby rozwiązywania typowych problemów ze skanerem oraz
Proces biznesowy Wikipedia: „Seria powiązanych ze sobą kroków, które rozwiązują określony problem lu
więcej podobnych podstron