440 (10)
440 11. Straty mocy i sprawność maszyn prądu przemiennego
W maszynach indukcyjnych o użłobkowanej powierzchni, zarówno rdzenia stojana, jak i wirnika, cały strumień wirującego pola magnetycznego w szczelinie pozostaje wprawdzie praktycznie stały, ale w poszczególnych zębach mogą występować duże lokalne pulsacje strumienia. Częstotliwość / tych pulsacji wyznacza się ze wzoru

(11.48)
przy czym n — prędkość obrotowa rdzeni względem siebie w obr/min.
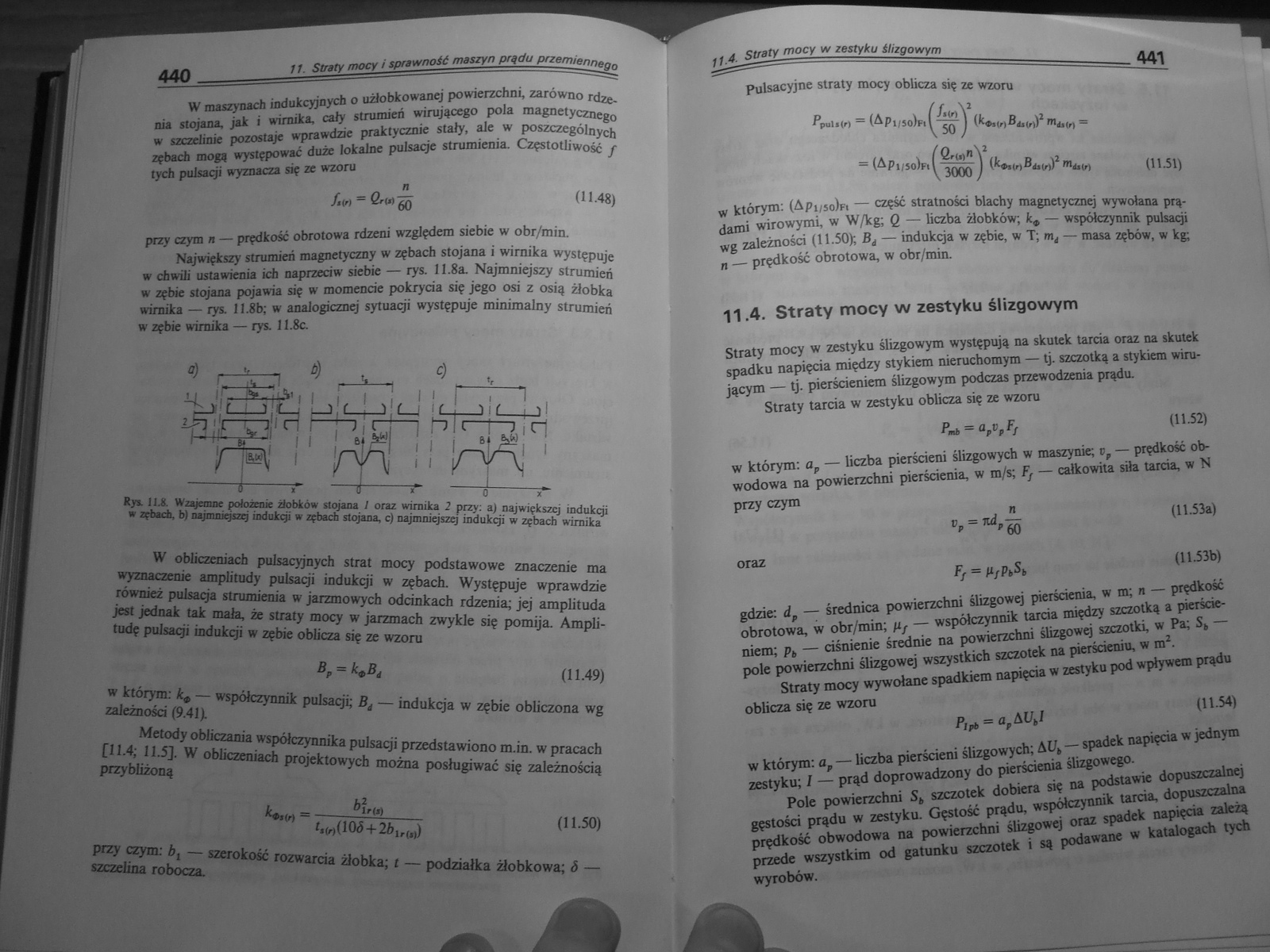
Największy strumień magnetyczny w zębach stojana i wirnika występuje w chwili ustawienia ich naprzeciw siebie — rys. 11.8a. Najmniejszy strumień w zębie stojana pojawia się w momencie pokrycia się jego osi z osią żłobka wirnika — rys. 11.8b; w analogicznej sytuacji występuje minimalny strumień w zębie wirnika — rys. 11.8c
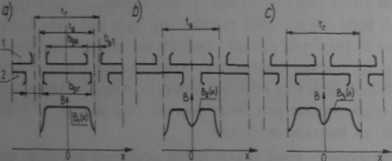
w zębach, b) najmnigpg indukcji w zębach stojana, c) najmniejszej indukcji w zębach wirnika
Ry*. 11.8. Wzajemne położenie żłobków stojana i oraz wirnika 2 przy: a) największej indukcji
W obliczeniach pulsacyjnych strat mocy podstawowe znaczenie ma wyznaczenie amplitudy pulsacji indukcji w zębach. Występuje wprawdzie również pulsacja strumienia w jarzmowych odcinkach rdzenia; jej amplituda jest jednak tak mała, że straty mocy w jarzmach zwykle się pomija. Amplitudę pulsacji indukcji w zębie oblicza się ze wzoru

(11.49)
w którym: fc* — współczynnik pulsacji; Bd — indukcja w zębie obliczona wg zależności (9.41).
Metody obliczania współczynnika pulsacji przedstawiono m.in. w pracach [11.4; 11-53- W obliczeniach projektowych można posługiwać się zależnością przybliżoną

Pfe ttW(10ó + 2ł>ir((i)
(11.50)
przy czym: bt — szerokość rozwarcia żłobka; t — podziałka żłobkowa; S — «7r7fJina robocza.
Pulsacyjne straty mocy oblicza się ze wzoru
Ppull(r) = (k«»(r)BiiCrł) m*lin ~
= (Api/sojn(k®*w®<*w)2 w*m
w którym: (Apł/S0)Pl — część stratnośd Wachy magnetycznej wywołana prądami wirowymi, w W/kg; Q — liczba żłobków, k9 — współczynnik pulsacji wg zależności (11.50); Bd — indukcja w zębie, w T; md masa zębów, w kg; n — prędkość obrotowa, w obr/min.
11.4. Straty mocy w zestyku ślizgowym
Straty mocy w zestyku ślizgowym występują na skutek tarcia oraz na skutek spadku napięcia między stykiem nieruchomym — tj. szczotką a stykiem wirującym — tj. pierścieniem ślizgowym podczas przewodzenia prądu.
Straty tarcia w zestyku oblicza się ze wzoru
P«* = a,o,F/ (H-52)
w którym: ar — liczba pierścieni ślizgowych w maszynie; vf — prędkość obwodowa na powierzchni pierścienia, w m/s; Ff — całkowita siła tarcia, w N przy czym
v, = nd,£ Ul-53a>
oraz
Ff = M/PkSs (H-53b)
gdzie: dp — średnica powierzchni ślizgowej pierścienia, w m; n — prędkość obrotowa, w obr/min; nf — współczynnik tarcia między szczotką a pierścieniem; p* — ciśnienie średnie na powierzchni ślizgowej szczotki, w Pa; Sh — pole powierzchni ślizgowej wszystkich szczotek na pierścieniu, w m2.
Straty mocy wywołane spadkiem napięcia w zestyku pod wpływem prądu oblicza się ze wzoru
P,*=.a,Aiy (11.54)
w którym: ar — liczba pierścieni ślizgowych; AU* — spadek napięcia w jednym zestyku; / — prąd doprowadzony do pierścienia ślizgowego.
Pole powierzchni S* szczotek dobiera się na podstawie dopuszczalnej gęstości prądu w zestyku. Gęstość prądu, współczynnik tarcia, dopuszczalna prędkość obwodowa na powierzchni ślizgowej oraz spadek napięcia przede wszystkim od gatunku szczotek i są podawane w katalogach tych wyrobów.
Wyszukiwarka
Podobne podstrony:
422 (10) 422 11. Straty mocy i sprawność maszyn prądu przemiennego rzona przy indukcji Bf i częstotl
438 (10) 438 11. Straty mocy i sprawność maszyn prądu przemiennego stratami w maszynie o uzwojeniu ś
420 (9) 420 11. Straty mocy / sprawność maszyn prądu przemiennego turze 9, w 12-m; J — gęstość prądu
424 (9) 424 11. Straty mocy i sprawność maszyn prądu przemiennego Wystarczającą dokładność, potrzebn
426 (11) 426 11. Straty mocy i sprawność maszyn prądu przemiennego cznej pętli histerezy, odpowiadaj
428 (11) 428 11. Straty mocy i sprawność maszyn prądu przemiennego przy czym: B — amplituda rozkładu
432 (12) 432 11. Straty mocy i sprawność maszyn prądu przemiennenn ^OrU) = “2 tQrU) Z COS jferW Oktf
436 (11) 436 11. Straty mocy i sprawność maszyn prądu przemiennego Współczynnik k„ nazywany współczy
442 (11) 442 11 Straty mocy i sprawność maszyn prądu przemiennear, 11.5. Straty mocy w układzie went
444 (20) 11. Straty mocy i sprawność maszyn prądu przemiennego444 W zależności od wymagań projektowy
DSCF1273 434 11. Straty mocy i sprawność maszyn prądu przemiennego straty zaś na powierzchni stojana
418 (11) STRATY MOCY I SPRAWNOŚĆ MASZYN PRĄDU PRZEMIENNEGO11.1. Uwagi ogólne Sprawność maszyny jest
430 (14) 4 30 11. Straty mocy < sprawy** przy czym głębokość wnikania K--J .1
Związek mocy i momentu w maszynie indukcyjnej 13.Związek mocv i momentu w maszynie indukcyjnej: Moc
skanuj0017 (148) 261Rys.5.19. Pomiar mocy pobranej z sieci prądu przemiennego trójfazowego za pomocą
DSC00644 (10) R S T Schemat blokowy układu serwona pęd owego prądu przemiennego z silnikiem
16182 skanuj0016 (159) 260 Rys.5.17. Pomiar mocy pobranej z sieci prądu przemiennego trójfazowego za
więcej podobnych podstron