426 (11)
426 11. Straty mocy i sprawność maszyn prądu przemiennego
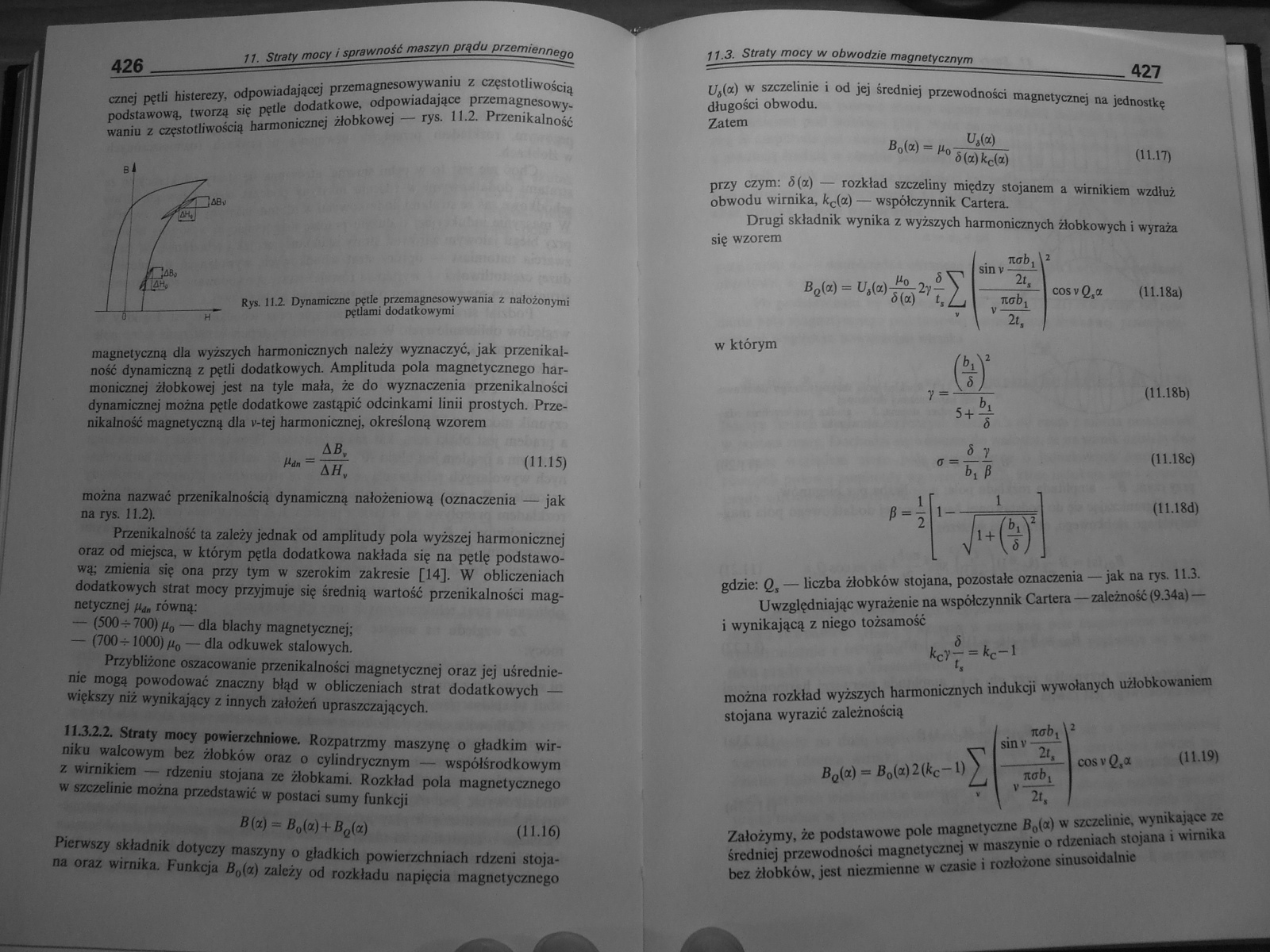
cznej pętli histerezy, odpowiadającej przemagnesowywaniu z częstotliwością podstawową, tworzą się pętle dodatkowe, odpowiadające przemagnesowy-waniu z częstotliwością harmonicznej żłobkowej — rys. 11.2. Przenikalność
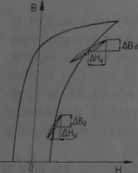
Rys. 11.2. Dynamiczne pętle przcmagnesowywania z nałożonymi pętlami dodatkowymi
magnetyczną dla wyższych harmonicznych należy wyznaczyć, jak przenikalność dynamiczną z pętli dodatkowych. Amplituda pola magnetycznego harmonicznej żłobkowej jest na tyle mała, że do wyznaczenia przenikalności dynamicznej można pętle dodatkowe zastąpić odcinkami linii prostych. Przenikalność magnetyczną dla v-tej harmonicznej, określoną wzorem

(11.15)
można nazwać pizenikalnością dynamiczną nałożeniową (oznaczenia — jak na rys. 11.2).
Przenikalność ta zależy jednak od amplitudy pola wyższej harmonicznej oraz od miejsca, w którym pętla dodatkowa nakłada się na pętlę podstawową; zmienia się ona przy tym w szerokim zakresie [14]. W obliczeniach dodatkowych strat mocy przyjmuje się średnią wartość przenikalności magnetycznej równą;
— (500-^ 700) /t„ — dla blachy magnetycznej;
— (700 -4-1000) fi0 — dla odkuwek stalowych.
Przybliżone oszacowanie przenikalności magnetycznej oraz jej uśrednienie mogą powodować znaczny błąd w obliczeniach strat dodatkowych — większy niż wynikający z innych założeń upraszczających.
fl J.2.2. Straty mocy powierzchniowe. Rozpatrzmy maszynę o gładkim wirniku walcowym bez żłobków oraz o cylindrycznym — współśrodkowym z wirnikiem — rdzeniu stojana ze żłobkami. Rozkład pola magnetycznego w szczelinie można przedstawić w postaci sumy funkcji
(11.16)
B(cc) | B0(a)+B0(a)
Pierwszy składnik dotyczy maszyny o gładkich powierzchniach rdzeni stojana oraz wirnika. Funkcja B0(a) zależy od rozkładu napięcia magnetycznego

11.3. Straty mocy w obwodzie magnetycznym
U4(a) w szczelinie i od jej średniej przewodności magnetycznej na jednostkę długości obwodu.
Zatem
9
przy czym: 5 (a) — rozkład szczeliny między stojanem a wirnikiem wzdłuż obwodu wirnika, kc(a) — współczynnik Cartera.
Drugi składnik wynika z wyższych harmonicznych żłobkowych i wyraża się wzorem
Herb,'
Boto
sin v
2t.
cosvQ,a (11.18a)
w którym
7 =
m
1-
1
(li.l8b)
(11.18c) (11.18d)
gdzie: Q, — liczba bobków stojana, pozostałe oznaczenia — jak na rys. UJ.
Uwzględniając wyrażenie na współczynnik Cartera—zależność (9.34a)— i wynikającą z niego tożsamość
kcT7 = *c-l •*
można rozkład wyższych harmonicznych indukcji wywołanych użłobkowaniem stojana wyrazić zależnością
BJo.) = B0(<x)2(k,
smv
cosvg,«
(IMS)
Założymy, że podstawowe pole magnetyczne fi0(ot) w szczelinie, wynikające ze średniej przewodności magnetycznej w maszynie o rdzeniach stojana i wirnika bez żłobków, jest niezmienne w czasie i rozłożone sinusoidalnie
A
Wyszukiwarka
Podobne podstrony:
420 (9) 420 11. Straty mocy / sprawność maszyn prądu przemiennego turze 9, w 12-m; J — gęstość prądu
422 (10) 422 11. Straty mocy i sprawność maszyn prądu przemiennego rzona przy indukcji Bf i częstotl
424 (9) 424 11. Straty mocy i sprawność maszyn prądu przemiennego Wystarczającą dokładność, potrzebn
428 (11) 428 11. Straty mocy i sprawność maszyn prądu przemiennego przy czym: B — amplituda rozkładu
432 (12) 432 11. Straty mocy i sprawność maszyn prądu przemiennenn ^OrU) = “2 tQrU) Z COS jferW Oktf
436 (11) 436 11. Straty mocy i sprawność maszyn prądu przemiennego Współczynnik k„ nazywany współczy
438 (10) 438 11. Straty mocy i sprawność maszyn prądu przemiennego stratami w maszynie o uzwojeniu ś
440 (10) 440 11. Straty mocy i sprawność maszyn prądu przemiennego W maszynach indukcyjnych o użłobk
442 (11) 442 11 Straty mocy i sprawność maszyn prądu przemiennear, 11.5. Straty mocy w układzie went
444 (20) 11. Straty mocy i sprawność maszyn prądu przemiennego444 W zależności od wymagań projektowy
DSCF1273 434 11. Straty mocy i sprawność maszyn prądu przemiennego straty zaś na powierzchni stojana
418 (11) STRATY MOCY I SPRAWNOŚĆ MASZYN PRĄDU PRZEMIENNEGO11.1. Uwagi ogólne Sprawność maszyny jest
430 (14) 4 30 11. Straty mocy < sprawy** przy czym głębokość wnikania K--J .1
skanuj0017 (148) 261Rys.5.19. Pomiar mocy pobranej z sieci prądu przemiennego trójfazowego za pomocą
1. Wstęp Maszyny indukcyjne są maszynami prądu przemiennego. Następuje w nich przetwarzanie energii
Fundamentalną zasadą działania maszyn prądu przemiennego jest wytwarzanie wirującego pola magnetyczn
290 (23) 290 9. Obliczanie obwodu magnetycznego maszyn prądu przemienne Tablica 9.1. Wielkości oblic
więcej podobnych podstron