Dokument Dokument
Cezary Spechł - System GPS
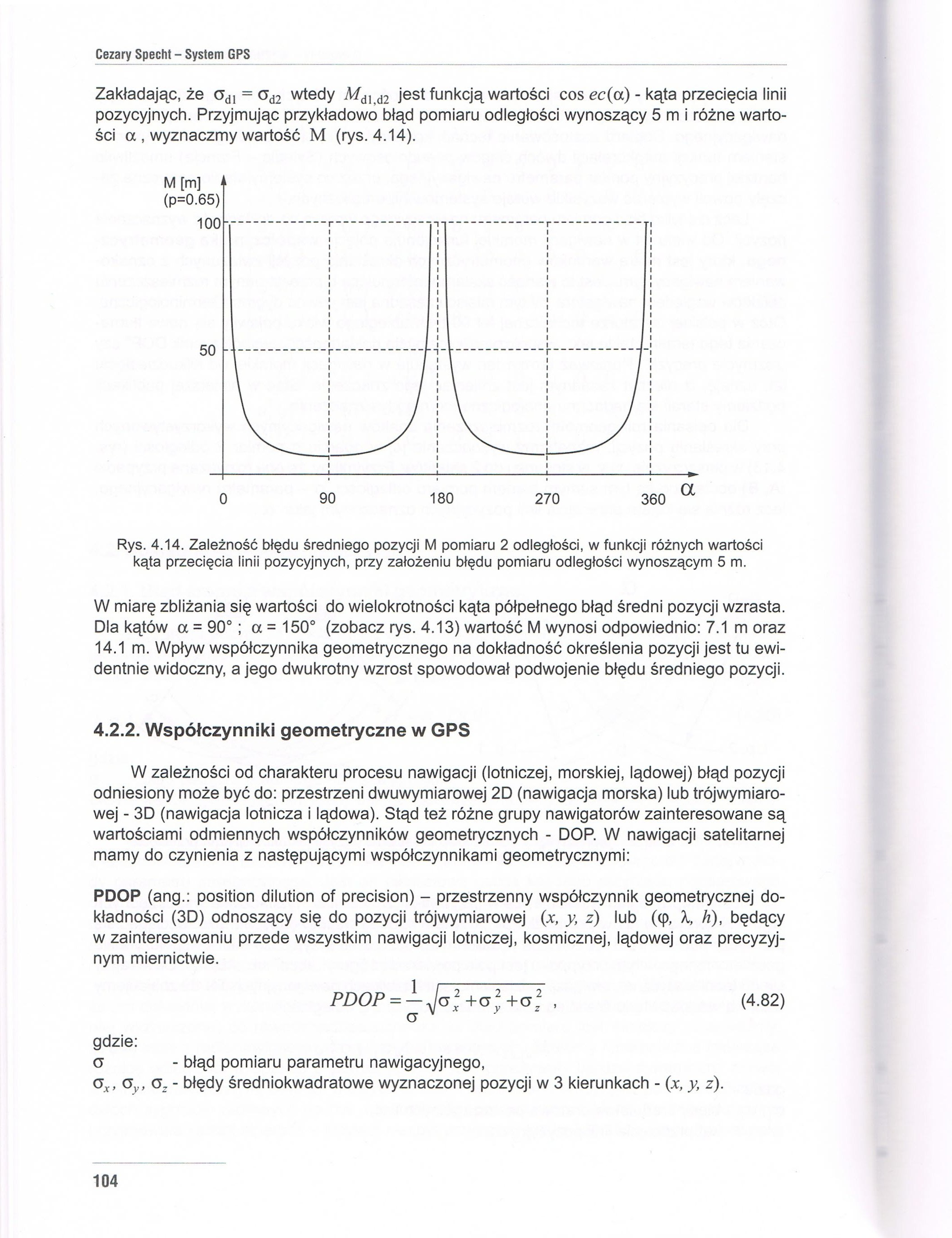
Zakładając, że crdl = od2 wtedy Mdl d2 jest funkcją wartości cos ec(a) - kąta przecięcia linii pozycyjnych. Przyjmując przykładowo błąd pomiaru odległości wynoszący 5 m i różne wartości a , wyznaczmy wartość M (rys. 4.14).
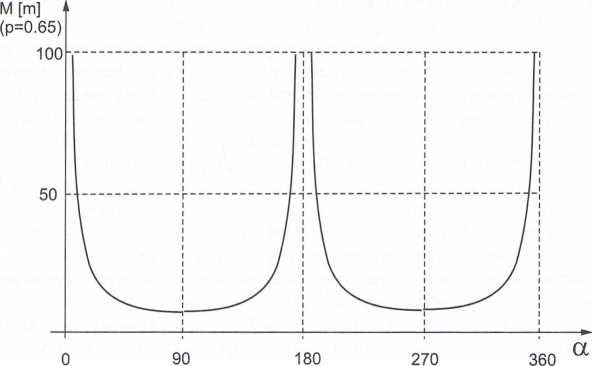
Rys. 4.14. Zależność błędu średniego pozycji M pomiaru 2 odległości, w funkcji różnych wartości kąta przecięcia linii pozycyjnych, przy założeniu błędu pomiaru odległości wynoszącym 5 m.
W miarę zbliżania się wartości do wielokrotności kąta półpełnego błąd średni pozycji wzrasta. Dla kątów a = 90°; a = 150° (zobacz rys. 4.13) wartość M wynosi odpowiednio: 7.1 m oraz 14.1 m. Wpływ współczynnika geometrycznego na dokładność określenia pozycji jest tu ewidentnie widoczny, a jego dwukrotny wzrost spowodował podwojenie błędu średniego pozycji.
4.2.2. Współczynniki geometryczne w GPS
W zależności od charakteru procesu nawigacji (lotniczej, morskiej, lądowej) błąd pozycji odniesiony może być do: przestrzeni dwuwymiarowej 2D (nawigacja morska) lub trójwymiarowej - 3D (nawigacja lotnicza i lądowa). Stąd też różne grupy nawigatorów zainteresowane są wartościami odmiennych współczynników geometrycznych - DOP. W nawigacji satelitarnej mamy do czynienia z następującymi współczynnikami geometrycznymi:
PDOP (ang.: position dilution of precision) - przestrzenny współczynnik geometrycznej dokładności (3D) odnoszący się do pozycji trójwymiarowej (x, y, z) lub (cp, X, h), będący w zainteresowaniu przede wszystkim nawigacji lotniczej, kosmicznej, lądowej oraz precyzyjnym miernictwie.
PDOP = -7a>a;+az2 , (4.82)
a v
gdzie:
a - błąd pomiaru parametru nawigacyjnego,
ax, ay, a2 - błędy średniokwadratowe wyznaczonej pozycji w 3 kierunkach - (x, y, z).
104
Wyszukiwarka
Podobne podstrony:
Kryptografia klasyczna tekst jawny Cezary Główna zasada bezpieczeństwa: Zakładamy, że
Pienią^ i ceny zwi^ok-tirzy-Gzyiiowy Zakładając, że popyt na realne zasoby pieniądza jest stały, to
Zakładając, że popyt na realne zasoby pieniądza jest stały, to wzrost nominalnej wartości pieniądza
Teoria rzeczywistego konfliktu interesów - zakłada, że uprzedzenia powstają wtedy, kiedy różne grapy
dokumenty436 3 (^>bhczyć wskazania woltomierza przy częstotliwościach /a))f= 0 Hz, b) f= 50 Hz.
SIWE Uwaga Studenci, rewolucja w dokumentacji toku studiów Z duża przyjemnością informujemy, że nasz
Zakres funkcjonalny systemów informatycznych Typowy model (np. MIT’90) zakłada, że technologia
skanowanie0006 15 □ Druga strategia zakłada, że systematyka jest nauką praktyczną
Scan20 128. Zapis w dokumencie przewozowym: „Przewóz zgodny z 1.1.4.2.1” oznacza,
Strategia SQUEEZE Strategia SQUEEZE zakłada, że wydajność systemu produkcyjnego jest ograniczona
59407 Scan20 128. Zapis w dokumencie przewozowym: „Przewóz zgodny z 1.1.4.2.1” ozn
Obraz (89 Anilina. Dokumentacja dopuszczalnych wielkości narażenia zawodowego uznano, że w praktyce
P1010113 arkusz oceny okresowej pracownika, dokument stosowany powszechnie w systemach -> ocen ok
więcej podobnych podstron