HPIM0764

2. Definicje i klasyfikacja robotów przemysłowych
M4 TEMATYKA
— wyznaczenie potrzebnych współrzędnych stanu obiektu jest
wane prostymi środkami, bez uciekania się do złożonych algoryt-^l rozpoznawania obrazów i analizy sytuacji.
Oczekuje się, że jeszcze w tym stuleciu będą stosowane roboty prze- ! słowe trzeciej generacji, zdolne do samodzielnego rozwiązywania zadań w wi cesie produkcji. Roboty tej generacji będą wyposażone w dużą liczbę czujnjf£| oraz złożony system sterowania, koordynujący pracę kilku ramion (kilku roki tów). Roboty takie są już badane w laboratoriach i prezentowane na wielu i i prozach technicznych. Roboty adaptacyjne będą zdolne do przyjmowania I człowieka poleceń wydawanych w formie słownej. Zbiór prognozowanych §sj ściwości robotów przemysłowych trzeciej generacji jest podany w tabl. 2.1., || Roboty III generacji charakteryzować się będą więc pewnymi j« 1 lektualnymi możliwościami aktualizowania programu pracy w zmieniających
Pa.
warunkach. Wyposażenie robotów w analizatory wzroku, słuchu i czucia 1 liwi rozpoznawanie przedmiotów w przestrzeni, która została zapamiętana mięci robota.
Niederliński [63] tak charakteryzuje dalsze generacje robotów: „RoW generacji II/III (dwa i pół) i III są wyposażone w zdolności rozpoznania zlo^l nych kształtów i klasyfikacji złożonych sytuacji, a ich system sterowania ma*:] zadanie między innymi wyposażenie ich w umiejętność radzenia sobie w syki acjach zawierających elementy nieokreśloności i nowości. Jest to możliwe (gj razie w bardzo ograniczonym zakresie), dzięki dużemu zwiększeniu mocy obij. i czeniowej sterujących je komputerów w porównaniu z robotami generacji |l| mimo bardzo podobnego wyposażenia w kamery telewizyjne i przetwornik i dotykowe”.
Szybki rozwój metod sztucznej inteligencji oraz wzrost mocy obliczenia wej komputerów w ostatnim dziesięcioleciu pozwalają optymistycznie patrzeć na wiele dotychczas zupełnie fantastycznych bądź nieekonomicznych zastosow* robotów inteligentnych. Niektóre z tych zastosowań będą omówione w dziewij. ' tym i dziesiątym rozdziale podręcznika.
2.2.4. Klasyfikacja robotów ze względu na liczbę stopni swobody i rodzaj napędu
Współczesne roboty przemysłowe mają dużą liczbę stopni swobody (z reguł; 5-5-7): każdemu z tych stopni, tzn. każdej parze kinematycznej, odpowiada od-dzielny zespół napędowy. Aby zrealizować konkretną operację technologiczni lub manipulacyjną, należy sterować grupą elementów wykonawczych. W zależ- -ności od rodzaju energii do wprawiania w ruch mechanizmów robota rozróżni j się napędy: pneumatyczne, hydrauliczne (precyzyjniej elektrohydrauliczne) i da-ych upnKzczpna.klasyfikację pokazano na rys. 2.5. Dokładną klasy f^T*Tltf^»y^fe1fe]rtiyclj4/rŁO^łach przemysłowych przedstawiono w slir i Oziatepodręc/nika.
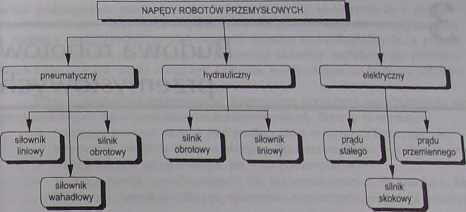
Rysunek 2.5______________
Klasyfikacja robotów ze wzglądu na rodzaj stosowanego napędu
Obecnie większość robotów jest wyposażona w napędy elektryczne i tylko w nielicznych robotach przemysłowych jest stosowany napęd pneumatyczny lub hydrauliczny. Należy podkreślić, że napędy elektryczne charakteryzują się stosunkowo dużą całkowitą sprawnością przetwarzania energii i dlatego są obecnie powszechnie stosowane w robotyce.
2.2.5. Klasyfikacja robotów ze względu na inne kryteria
W pracy [61] są również inne klasyfikacje robotów w zależności od innych kryteriów podziału. Według kryterium przeznaczenia można wyróżnić roboty do celów:
- przemysłowych,
- naukowych i szkoleniowych,
- badawczych pod wodą, w przestrzeni kosmicznej,
- medycznych,
- specjalnych i inspekcyjnych, np. do walki z terrorystami,
- do innych zadań.
Wyszukiwarka
Podobne podstrony:
HPIM0760 2. Definicje i klasyfikacja robotów przemysłowych Według Moreckicgo [62] „robot to urządzen
HPIM0762 MATEMATYKA 2.2. Klasyfikacja robotów przemysłowych Ze względu na rozwiązania kinematyczne r
HPIM0759 <k> l^ca Ic zr*Qf,Definicje i klasyfikacja robotów przemysłowych L2.1. Definicje pods
Definicje i klasyfikacja robotów przemysłowych 1. Definicje podstawowe Do dalszych rozważań pizyjęto
P1080191 (2) 2Definicje i klasyfikacja robotów przemysłowych2.1. Definicje podstawowe Do dalszych ro
P1080192 (2) 2. Definicje i klasyfikacja robolów przemysłowych 2.2.1. Klasyfikacja robotów ze względ
P1080193 2. Definicje i klasyfikacja robotów przemysłowych względem podstawy. Konfiguracja cylindryc
P1080196 2. Definicje i klasyfikacja robotów przemysłowych Rysunek 2^_______ Klasyfikacja robotów ze
więcej podobnych podstron