HPIM0876
'
'
,, 4 śj.*« inmimroiwi*
|ako układy Urtowaw uhon ninm
tatóHgencji jest wyitlna luka fiinkcjonalna, którą powinno wypełnić posiwienie i rozwiązanie problemu optymalizacji.
Mną l kooctpąji układu sterowania moi być zastąpienie układu cyfro* wągb praąt warstwową sieć neuronową, u także zastosowanie sterowania opartego na teorii zbiorów rozmytych (ang, fiuty awtmł). Zagadnienia te omówiono w dałszęj cząfci podnośnika,
9.4. S'uvi neuronowe jako układy sterowania mchem robotów
MA Budowa sieci neuronowych
I możliwych biooicmych rozwiązań układów sterowania robota jest •stąpienie algorytmu sterowania przez, sstuczną siW neunmmi, zbudowaną I elementów neuropodobnych (perceptronów) [39, 51, 52, 93, 94), zwaną tez siecią ncurotułną.
Rm&rł* mruouYt (niwo*) jest układem baał/o złożonym. Najczęściej pr.włstawta stę «jak\> komórkę z witającymi kilkoma dendrymini i aksonem nkońctoaym kilkoma synapsami (lyą, 9,2),
()KfUinui kuraurti, i - jądro taw*ił>»c.
I - IBM | • 1|Hm| i i »)MpM
p tseczywisiosci komórka nerwowa ma kilka tysięcy dendrytów. a z in* i\m ntwroimi kontaktuje |R poprze/ mil Miny połączeń. Powierzchnia neuronu km |m| pan błoną. |||m m aa Sn około miliona tiw. młmi>-|M| c\ M odpowiedzialnych za utrzyma*
H aa wcwwęmoK) srane bkmy potencjału -70 mV względem otoczenia Od* mpowywamc” j«i'» sodu | wnętrza komórki. • wpust* IM «■»* przebiegać ciągle, gdyż błona komórko** prowadzącemu do zniwe*
u uuX,/0ny do komórki powoduje zmianę jej Hanu elektrycznego. następnie wzdłuż aksonu. Dzieje się to jednak nic w wyniku
przewodnictwu elektrycznego, u prze/ ekspansję lokalnych zmian stanu elektrycznego błony komórkowej. Zmiany potencjału błony są skutkiem jej zmiennej przepuszczalności dla jonów sodowych i potasowych. Po przejściu impulsu błona powruca do normalnego stanu. Dojście impulsu do synapsy (połączenia akson*dcndryt lub dendryt z inną komórką) powoduje uwolnienie z komórki pobudzającej ncurotrnnsmitcra, który z kolei jest przyczyną pobudzenia komórki odbicrująccj impuls. Neuroiransmiler to związek chemiczny przekazujący informację między neuronami. Pobudzenie neuronu odbierającego sygnał jest tym większe, im więcej ncurotrnnsmitcra wydzieli się z kolbki synaptycznej komórki pobudzającej. Łączne pobudzenie komórki nerwowej jest sumą pobudzeń na wszystkich połączeniach synaptycznych. Fakt ten ma bardzo duże znaczenie przy tworzeniu modelu neuronu i jest podstawą teorii sztucznych sieci neuronowych.
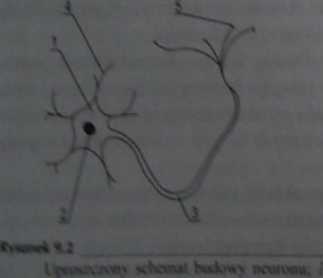
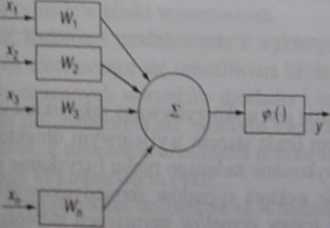
W praktyce do budowy sztucznych sieci neuronowych przyjmuje się model neuronu w postaci pokazanej na rys. 9.3.
Kywwti) ___
Model neuronu
'V modelu tym zmianę wagi synaptycznej iMłV“ neuronu Br pode® przejścia z chwili j do/ + |, która zależy' od jego stanu V onz stanu wejścia nr. analizuje się wg wzoru
CM)
Zmodyfikowana waga
W procesie samoocanua. opisanym powyższym modelem. modyfikacja podlegają tylko wagi tych połączeń, które są aktywne w emm pobodaoma ko* morki. <Ww w. te neuron « upływem czasu staje ssę coraz bmśmą podamy na to wymuszenie, które uaktywnia go tąc^kaj.
Neurony tworzą skć. czyli układ nerwowy. poncw totoaey tofcŚ
neu r ono w jest w stanic realizowwe funkcje rhmilinryrtwMr db gnmhi Mk
Wyszukiwarka
Podobne podstrony:
Wyróżnia się następujące układy sieci: - TN-S, w którym stosowany jest oddzielny
- układy logiczne sekwencyjne, których zadaniem jest realizacja przebiegu procesu
76 (70) 3.4.3. Układy równań II stopnia z parametrem Układy równań, z których jedno równanie jest co
pgk2 Specjalizowano układy VLSI 397 Kolejnym blokiem jest blok współpracy z monitorem. Blok ten zape
DSC07344 106 Układy równań liniowych wyróżnionych kolumn jest równa liczbie wierszy, które pozostały
strukturze prawa pracy układy nie tylko że nie jest sprzeczny z Konstytucją, co więcej- został uznan
2.4. UKŁADY BEZSZYNOWE — niezawodność pracy stacji jest większa niż stacji
MG!35 Mierzą one siły dokładniej niż układy poprzednie. Sygnał z tych przetworników jest podawany n
HPIM0846 li Układy iłomioiowu
HPIM0850 ? Układy Budowa pmtwonuJtt obaHottodinpulsowego (NŃfcahainfc / - żarówka. >T Tr »y.przy
HPIM0857 7. Układy stfosoiyc/ne Schemat blokowy układu wizyjnego robotów Rysunek 7.23 Ąmji) Rysunek
HPIM0858 7-6. Układy n*wrytz/w ‘b/wM i Mmi* 7. Układy senyyyc/ne Ultradźwiękowe mierniki odległości
więcej podobnych podstron