HWScan00252
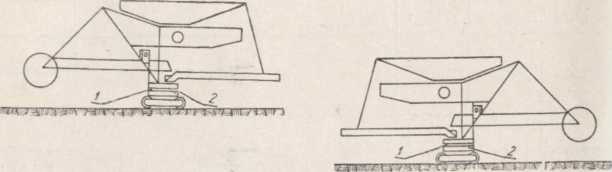
podpartego o płaszczyznę poziomą wynoszą a = arc sin (sin a cos /?), przy czym kąt /? jest kątem pomiędzy prostopadłą do boku AC a bokiem trójkąta podporowego. Wzdłuż każdego boku trójkąta podporowego przewiduje się zastosowanie poziomujących wag automatycznych, których zasadę wyjaśnia rys. 8.4.
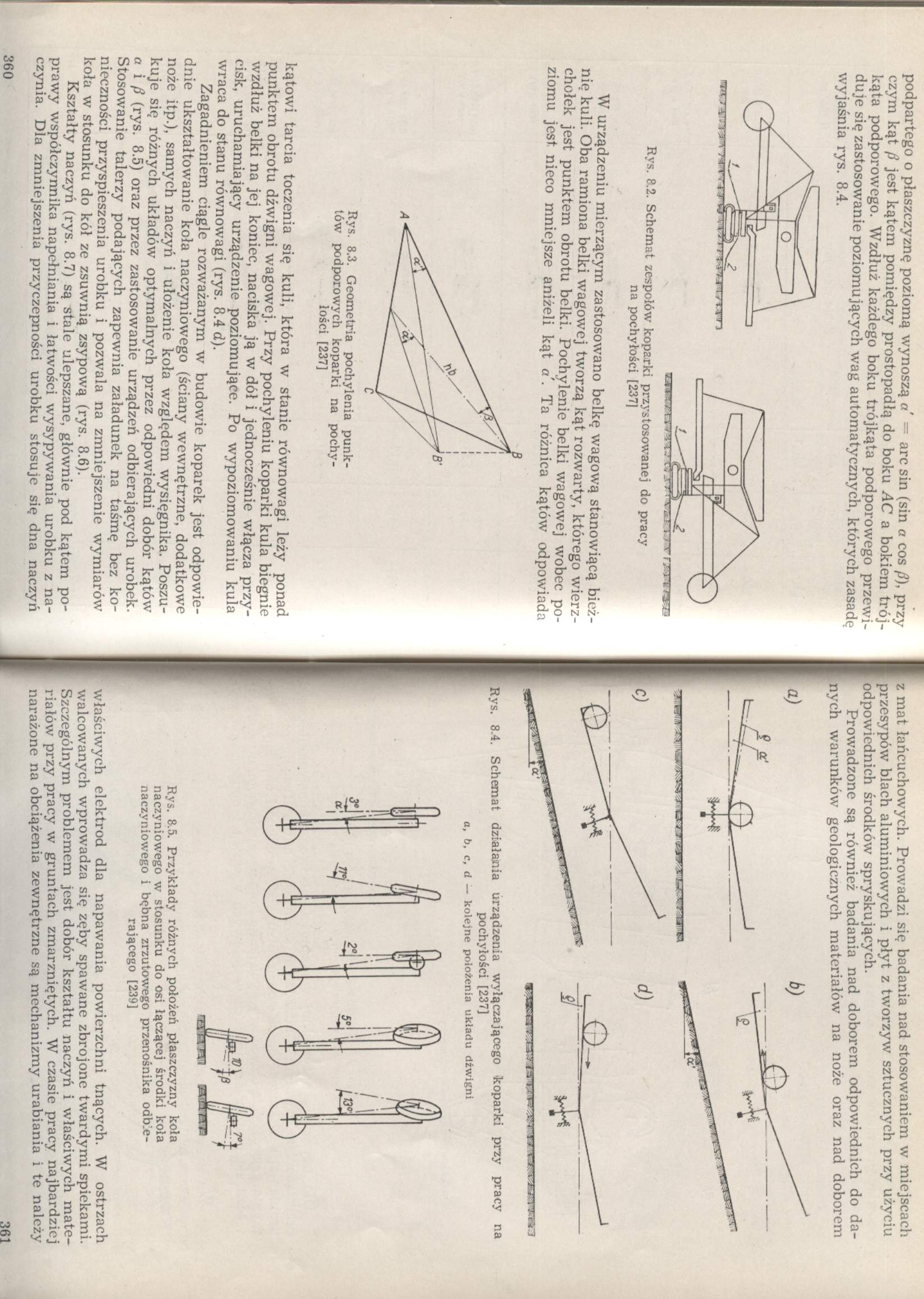
Rys. 8.2. Schemat zespołów koparki przystosowanej do pracy na pochyłości [237]
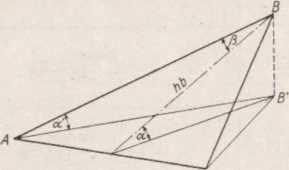
W urządzeniu mierzącym zastosowano belkę wagową stanowiącą bieżnię kuli. Oba ramiona belki wagowcj tworzą kąt rozwarty, którego wierzchołek jest punktem obrotu belki. Pochylenie belki wagowej wobec poziomu jest nieco mniejsze aniżeli kąt a. Ta różnica kątów odpowiada
C
Rys. 8.3. Geometria pochylenia punktów podporowych koparki na pochyłości [237]
kątowi tarcia toczenia się kuli, która w stanie równowagi leży ponad punktem obrotu dźwigni wagowej. Przy pochyleniu koparki kula biegnie wzdłuż belki na jej koniec, naciska ją w dół i jednocześnie włącza przycisk, uruchamiający urządzenie poziomujące. Po wypoziomowaniu kula wraca do stanu równowagi (rys. 8.4 d).
Zagadnieniem ciągle rozważanym w budowie koparek jest odpowiednie ukształtowanie koła naczyniowego (ściany wewnętrzne, dodatkowe noże itp.), samych naczyń i ułożenie koła względem wysięgnika. Poszukuje się różnych układów optymalnych przez odpowiedni dobór kątów a i /? (rys. 8.5) oraz przez zastosowanie urządzeń odbierających urobek. Stosowanie talerzy podających zapewnia załadunek na taśmę bez konieczności przyspieszenia urobku i pozwala na zmniejszenie wymiarów koła w stosunku do kół ze zsuwnią zsypową (rys. 8.6).
Kształty naczyń (rys. 8.7) są stale ulepszane, głównie pod kątem poprawy współczynnika napełniania i łatwości wysypywania urobku z naczynia. Dla zmniejszenia przyczepności urobku stosuje się dna naczyń
z mat łańcuchowych. Prowadzi się badania nad stosowaniem w miejscach przesypów blach aluminiowych i płyt z tworzyw sztucznych przy użyciu odpowiednich środków spryskujących.
Prowadzone są również badania nad doborem odpowiednich do danych warunków geologicznych materiałów na noże oraz nad doborem
Rys. 8.4. Schemat działania urządzenia wyłączającego koparki przy pracy na
pochyłości [237]
a, b, c, d — kolejne położenia układu dźwigni
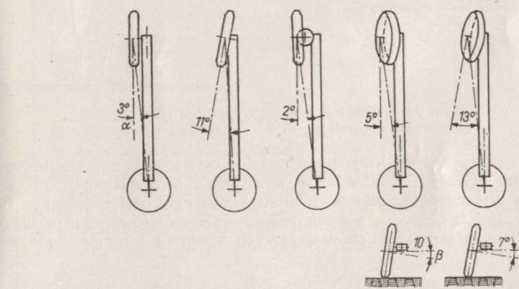
Rys. 8.5. Przykłady różnych położeń płaszczyzny koła naczyniowego w stosunku do osi łączącej środki koła naczyniowego i bębna zrzutowego przenośnika odbierającego [239]
właściwych elektrod dla napawania powierzchni tnących. W ostrzach walcowanych wprowadza się zęby spawane zbrojone twardymi spiekami. Szczególnym problemem jest dobór kształtu naczyń i właściwych materiałów przy pracy w gruntach zmarzniętych. W czasie pracy najbardziej narażone na obciążenia zewnętrzne są mechanizmy urabiania i te należy
361
Wyszukiwarka
Podobne podstrony:
test 2 Długość astronomiczna jest kątem pomiędzy płaszczyzną umownego południka zerowego a: Szerokoś
gf2 Rozdział 2lim x—-0lim x—-0 sinax _ a_ bx b arc sin<2x _ a_
HWScan00240 a poręcze odpowiednio na przesuwną siłę skupioną poziomą, wynoszącą 30 kG. Wpływ tych si
4. Naszkicować wykresy funkcji: 4.1. y = arc sin x, 4.2. y = arc tg x, 4.3. y = arc cos x. 4.4. y
Scan10117 gdzie: ZB wzór (5.52), tg ot„ a,, = arc tg- cos p„ kąt przyporu na kole podziałowym, (37/,
mechanika162 Przemieszczenie poziome tarczy 3 xf(t) = -u(t) = - — / sin «p = -0,6/sin(«p0sin(ii/) An
169 § 1. Pochodna i jej obliczanie 9° Funkcje kołowe (cykłometryczne). Rozpatrzmy funkcję y=arc sin
24 VIII. Funkcja pierwotna (całka nieoznaczona) (c) f arc sin * dx — x arc sin x— fxrfarcsinx = xarc
FizykaII266�01 260 w stosunku AB: AC — 1: sin a, gdzie « jest kątem nachylenia promieni do onćj płas
P1111259 24 VIII. Funkcja pierwotna (całka nieoznaczona) (c) J arc sin x dx = a arc sin x— f x d arc
108 natomiast kierunek wektora gradientu względem południka: (5.6) T-arc cos^Ł=arc sin g
więcej podobnych podstron