|
Skład grupy : 1-Bogusław Żukowski 2-Krzysztof Szczeciak 3-Abdrzej Kamiński 4-Arkadiusz Galant 5-Marcin Wysocki
|
Studia dzienne Rok 3 Semestr 6 Rok akademicki 1997/98 |
LABORATORIUM NAPĘDU ELEKTRYCZNEGO |
|
|
Grupa 1 Piątek 915 |
Temat: Badanie silnika obcowzbudnego prądu stałego |
OCENA : |
Data ćwiczenia : 1998-02-27 |
zasilanego z nawrotnego prostownika sterowanego. |
PODPIS : |
Cel ćwiczenia:
Celem ćwiczenia jest zapoznanie się z budową i właściwościami regulacyjnymi układu napędowego z silnikiem obcowzbudnym prądu stałego , zasilanego z tyrystorowego prostownika nawrotnego , oraz wyznaczenie charakterystyk mechanicznych i regulacyjnych układu.
Przedmiot badań:
Przedmiotem badań jest silnik obcowzbudny prądu stałego - PZBb
Numer fabryczny : 467008
Moc znamionowa : 1,5 [kW]
Napięcie znamionowe : 220 [V]
Częstotliwość : 50 [Hz]
Znamionowy prąd twornika : 8,7 [A]
Znamionowy prąd wzbudzenia : 0,4 [A]
Prędkość obrotowa znamionowa : 1450 [obr/min]
Przebieg ćwiczenia:
1) Zapoznanie się z budową i układem sterowania nawrotnego prostownika tyrystorowego
2) Pomiary statycznych charakterystyk elektromechanicznych :
a) , podczas biegu jałowego , czyli
przy , obciążeniu rezystancją - dla trzech różnych wartości prędkości obrotowej oraz napięć twornika , z tym że , dwie wartości dla jednego kierunku wirowania , a pozostała trzecia dla wirowania w przeciwnym kierunku.
Schemat układu pomiarowego przedstawiam na rysunku 1 (załącznik 1). Układy napędowy z nawrotnym prostownikiem sterowanym pracuje w zamkniętym układzie regulacji automatycznej , z ujemnym sprzężeniem prędkościowym oraz z ograniczeniem prądowym.
Tabele i obliczenia :
a) Pomiar
Charakterystyka elektromechaniczna , biegu jałowego , czyli
Pomiar
Napięcie twornika U = 200 [V]
Prędkość obrotowa = 1450 [obr/min]
Napięcie twornika U = 140 [V]
Prędkość obrotowa = 1000 [obr/min]
Napięcie twornika U = -180 [V]
Prędkość obrotowa = -1250 [obr/min]
Sposób przeliczenia obr/min na rad/s :
1 obrót - 2π
1450 - X na przykład :
Przeliczanie prądu twornika z działek na ampery
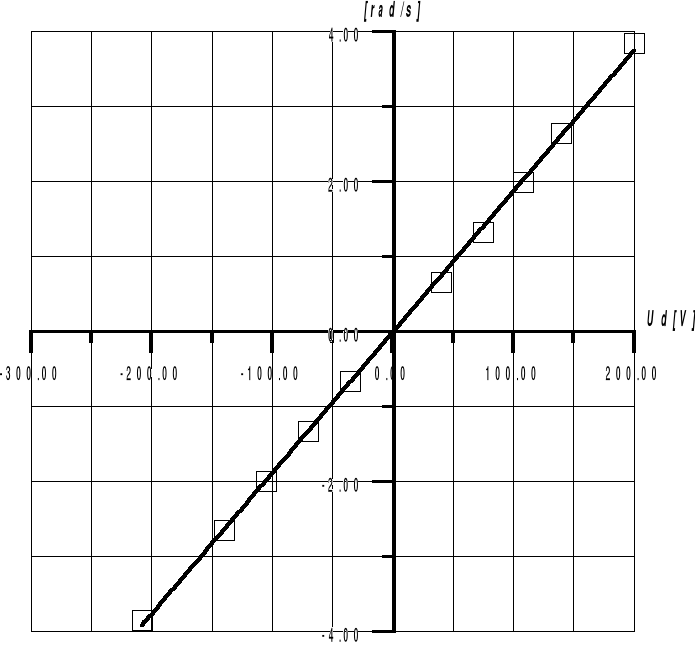
Charakterystyka elektromechaniczna przy ,
Wnioski :
Współczesne układy napędowe wymagają często dokładnej regulacji prędkości kątowej lub momentu obrotowego w szerokich granicach.
W układach napędowych prądu stałego najbardziej korzystna jest regulacja przez zmianę napięcia twornika. Dotychczas stosowano układy Leonarda lub wzmacniacze magnetyczne , obecnie stosuje się układy półprzewodnikowe zawierające - tyrystory i tranzystory mocy. Układy te mają wiele zalet:
-dużą dokładność oraz płynny i szeroki zakres regulacji prędkości kątowej,
-małe stałe czasowe układu regulacji oraz małe gabaryty i niewielką masę,
-mała moc sterowania
-dużą sprawność układu, trwałość , ekonomiczność ( małe koszta użytkowania i konserwacji )
Układy z prostownikami sterowanymi mają również wady :
-mały współczynnik mocy przy dużym kącie wysterowania tyrystorów,
-istnienie pulsacji prądu i napięcia wyprostowanego , co wymaga stosowania urządzeń wygładzających,
-małą przeciążalność prądową i napięciową przekształtnika,
-przy realizowaniu szybko działających układów nawrotnych konieczne jest stosowanie dwóch przekształtników,
-wprowadzenie wyższych harmonicznych do sieci zasilającej ( generacja zakłóceń ).
Prostowniki sterowane umożliwiają hamowanie odzyskowe silnika obcowzbudnego oraz rozruch przez zmianę napięcia twornika. Od prostowników tyrystorowych , zasilających układy napędowe prądu stałego wymaga się zwykle zapewnienia następujących parametrów:
a) wartość średnia napięcia wyprostowanego Ud nie powinna zależeć od zmian napięcia sieci zasilającej oraz od zmian i charakteru obciążenia,
b) układ sterowania powinien zapewniać stałą wartość prądu , niezależnie od zmian wartości napięcia zasilającego i obciążenia , w stanie ustalonym oraz podczas rozruchu i hamowania.
Zmianę wartości napięcia na wyjściu prostownika uzyskuje się przez zmianę kąta wysterowania α tyrystora. W razie braku indukcyjności w obwodzie głównym graniczna wartość kąta wysterowania zaworu wynosi αk = 60o. Dla kątów wysterowania α > αk płynie w obwodzie prąd przerywany. Tętniący charakter prądu wyprostowanego ma ujemny wpływ na pracę silnika. Tętnienia powodują wahania momentu obrotowego silnika oraz straty na prądy wirowe. Dlatego włącza się w obwód silnika dodatkową indukcyjność ( dławik ) , która powoduje zmniejszenie tętnień oraz ciągłe przewodzenie prądów dla kąta α > αk .
Przewodzenie tyrystorów w jednym kierunku stwarza konieczność wykonania układu rewersyjnego w napędach , w których wymagana jest zmiana kierunku wirowania. Nawrót silnika w układach z prostownikami sterowanymi może być realizowany jedną z trzech metod przez zmianę:
kierunku strumienia biegunów głównych,
biegunowości napięcia twornika , w wyniku przełączenia układu zasilania
biegunowości napięcia wyjściowego twornika , przy wykorzystaniu dwóch układów prostowników sterowanych
Układ ze zmianą biegunowości napięcia twornika pozwala na skrócenie czasu nawrotu , jednak nie mniej niż o 0,1s. Wynika on z konieczności dokonania odpowiednich czynności w układzie , między innymi zwiększenia kąta wysterowania tyrystorów α a więc zmniejszenia wartości średniej napięcia wyprostowanego. W przypadku napędu , od którego wymaga się bardzo szybkiego czasu nawrotu lub szybkiego przejścia z pracy silnikowej na hamowanie , przy tym samym kierunku wirowania , twornik silnika zasila się z układu dwóch przekształtników , z których każdy ma inną polaryzację napięcia. Jeden z prostowników zasila silnik , drugi zaś jest wyłączony lub przygotowany do pracy inwertorowej. Warunkiem uzyskania pracy inwertorowej jest zapewnienie ( pod wpływem SEM twornika ) przepływu prądu w obwodzie twornika zgodnie z kierunkiem przewodzenia zaworów przekształtnika. Uzyskuje się zwrot energii do sieci.
Wyszukiwarka
Podobne podstrony:
LABORATORIUM-NAPĘDÓW ELEK, Naped, UK˙AD DO REGULACJI PR˙DKO˙CI OBROTOWEJ
LABORATORIUM-NAPĘDÓW ELEK, aut nap 1, Politechnika Wrocławska
LABORATORIUM-NAPĘDÓW ELEK, Hamowanie, POLITECHNIKA
LABORATORIUM-NAPĘDÓW ELEK, napedy 1, POLITECHNIKA
LABORATORIUM-NAPĘDÓW ELEK, Napęd 3, CEL ĆWICZENIA
Program zajęć ED, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła, L
EDi4 2-lista 2004, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła,
złożenie, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP5
EDi4 2-lista 2003, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła,
HP2 sprawko, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP2
wzory2(1), SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP5
Program zajęć EZ, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła, L
niezbędneminimum, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP6
Sterowanie proporcjonalne, studja, 5 semestr, Laboratorium napędów hydraulicznych i pneumatycznych
Test 2003 Grupa I, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła,
HP2 grupa Bb, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP2
instrukcja hp2, studja, 5 semestr, Laboratorium napędów hydraulicznych i pneumatycznych, hp2
HP2 grupa B, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP2
wzory(1), SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP5
więcej podobnych podstron