1484605281
14
2.3. Łańcuchy kinematyczne 2.3.1. Podziały
O łańcuchu kinematycznym lub układzie kinematycznym mówimy wtedy, gdy szereg członów jest połączonych ruchowo (tworzy ze sobą pary kinematyczne). Kilka przykładów łańcuchów kinematycznych przedstawiono na rys. 11.
W zależności od ich budowy wyróżnia się łańcuchy:
- otwarte (rys. 1 la) i zamknięte (rys. 1 lb, c, d),
- płaskie (rys. 1 la, b, c) i przestrzenne (rys. 1 ld),
- jednokonturowe (rys. 1 lb, d) i wielokonturowe (rys. 1 lc).
Można też uwzględnić ich właściwości ruchowe. Stosownie do tego można dzielić łańcuchy na trzy grupy (rys. 12): ruchliwe, mieszane, nieruchliwe.
W praktyce wykorzystuje się najczęściej układy kinematyczne ruchliwe. Dzieli się je zwykle na: jednobieżne i niejednobieżne.
Układy kinematyczne jednobieżne charakteryzują się tym, że wszystkie człony układu realizują jednoznacznie określone ruchy względem pozostałych członów. Przykładem takiego układu jednobieżnego jest układ korbowo-wodzikowy (rys. 13a). Przy zadanym ruchu obrotowym korby 2 pozostałe człony 3 i 4 realizują ruchy jednoznacznie określone. Przykładem układu niejednobieżnego jest układ pięcioprzegubowy (rys. 13b) z jednym napędem przyłożonym do członu 2. Tu ruch jednego członu czynnego (2) nie wymusza jednoznacznych ruchów pozostałych członów (3,4 i 5). Efekt taki uzyska się przez wymuszenie dodatkowo np. ruchu członu 5. Pojęcia te zostaną jeszcze wykorzystane w kolejnych rozdziałach. Na ogół jednobieżność układu można uzyskać przez dobranie każdorazowo odpowiedniej liczby napędów. W budowie maszyn dominującą grupę stanowią układy jednobieżne.
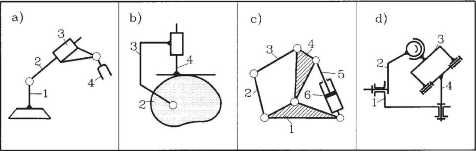
Rys. 11. Przykłady łańcuchów kinematycznych: a) otwarty, b), c), d) zamknięte, a), b), c) płaskie, d) przestrzenny
Wyszukiwarka
Podobne podstrony:
59217 małpi łańcuch Przecytuj lub ikopluj te mofpki Prxydod«q <• «i»
0000036(1) go fragmentu łańcucha skrobi lub glikogenu. Pomimo, że reakcja fosforolizy jest odwracaln
3tom098 3. SIECI ELEKTROENERGETYCZNE 198 Zależnie od przeznaczenia stosuje się łańcuchy przelotowe l
Alkeny- nienasycone węglowodory łańcuchowe zawierające 1 lub więcej wiązań podwójnych. Atomy węgla
- jednoczlon (s) o układzie osi B0-2 - dwuczłon (s-s lub s-d) o
142 Ewa Malczyk Wartość wskaźnika TBA a, b, c lub A, B, C - różne litery wskazują na statystycznie i
W wierszu 51 wykazuje się kapitał (fundusz) rezerwowy, tworzony z zysku do podziału, z dopłat wspóln
Dziennik Ustaw Nr 263 15412 - Poz. 1572 7. Jeżeli podział nieruchomości rolne
142,143 2 właściwie, np. wymowa mię lub je opuszcza (elizja), należy /. logopedy i wspólnie (lo
Podział stawów, definicja łańcucha kinematycznego Istnieją 3 kryteria podziału stawów: 1. Ze względu
Używając idei topologii, Reuleaux rozpatrywał elementy maszyn jako łańcuch kinematyczny lub układ pa
182.4. Ruchliwość W Ruchliwość łańcucha (układu kinematycznego) lub stopień ruchliwości (W) w sensie
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
SNC00156 OTWARTY ŁAŃCUCH KINEMATYCZNY Końcowe ogniwo (kosc) jest swobodne łączy się tylko z jednym o
więcej podobnych podstron