7270841574
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO ROBOTA 8
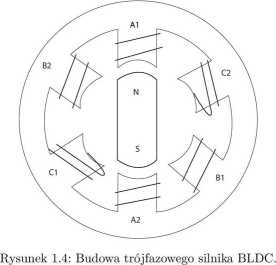
zację oznaczymy symbolami + i —, to opisaną sekwencję ruchów, powodującą obrót zgodnie ze wskazówkami zegara można zapisać w postaci:A+,B+,A-,B-. Jeżeli chcielibyśmy obrócić wirnik przeciwnie do poprzedniego ruchu, to należałoby wykonać sekwencję ruchów A+,B-,A-,B+.Do tego typu sterowania można wykorzystać np. załączane/wyłączane cyklicznie tranzystory (rysunek 1.5). Jeżeli zasililibyśmy jednocześnie dwa uzwojenia, uzyskalibyśmy
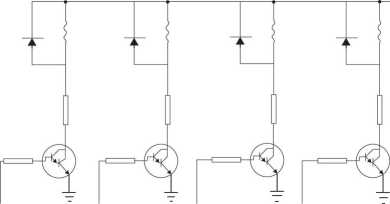
Rysunek 1.5: Unipolarny sterownik silnika krokowego.
sterowanie pełnokrokowe. Zaletą tego typu sterowania jest dwukrotnie większy moment
Wyszukiwarka
Podobne podstrony:
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ćwiczenie i. właściwości dynamiczne elektrycznego zespołu NAPĘDOWEGO ROBOTA Jednocześnie zachodzą
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
Ćwiczenie 1Właściwości dynamiczne elektrycznego zespołu napędowego robota Rysunek 1.1: Stanowisko
Ćwiczenie 2Właściwości dynamiczne pneumatycznego zespołu napędowego robota2.1 Cel
Elektronika w sterowaniu zespołów napędowych Semestr Rodzaj zajęć Liczba godzin Liczba punktów
DSC00499 (13) Wyznaczanie ładunku właściwego Jj ełektronu Vvm*g***iJ* do ćwiczenia uvlkości opisując
1 (368) Instytut Systemów Inżynierii Elektrycznej ZESPÓŁ SYSTEMÓW POMIAROWYCH Ćwiczenie 10Pomiary en
więcej podobnych podstron