7270841578
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO ROBOTA 12
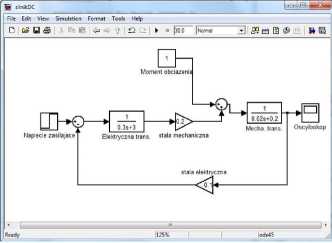
Rysunek 1.9: Schemat zamodelowanego silnika w Simulinku w środowisku Ma-tlab/Simulink
1.6 Przykładowe zadania dodatkowe
1. Jak zmienia się dynamika napędu w zależności od charakteru momentu obciążenia dla silników krokowych? Czy przy jakichś parametrach obciążenia obserwuje się niepokojące zachowania silnika np. w postaci przeskakiwania kroków? Zaobserwować to zjawisko i wyjaśnić przyczyny.
2. Zbadać który z silników: krokowy czy BLDC zachowuje się lepiej przy małych prędkościach obrotowych.
3. Dla dowolnego silnika (DC, BLDC, krokowego) przetestować różnice w sterowaniu, przy zastosowaniu różnego rodzaju regulatorów. Dla silników DC i krokowego program można napisać w języku C lub Matlabie. Dla silnika BLDC program piszemy w Pythonie.
Wyszukiwarka
Podobne podstrony:
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ćwiczenie i. właściwości dynamiczne elektrycznego zespołu NAPĘDOWEGO ROBOTA Jednocześnie zachodzą
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
Ćwiczenie 1Właściwości dynamiczne elektrycznego zespołu napędowego robota Rysunek 1.1: Stanowisko
Ćwiczenie 2Właściwości dynamiczne pneumatycznego zespołu napędowego robota2.1 Cel
Elektronika w sterowaniu zespołów napędowych Semestr Rodzaj zajęć Liczba godzin Liczba punktów
DSC00499 (13) Wyznaczanie ładunku właściwego Jj ełektronu Vvm*g***iJ* do ćwiczenia uvlkości opisując
1 (368) Instytut Systemów Inżynierii Elektrycznej ZESPÓŁ SYSTEMÓW POMIAROWYCH Ćwiczenie 10Pomiary en
więcej podobnych podstron