7270841576
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO ROBOTA 10
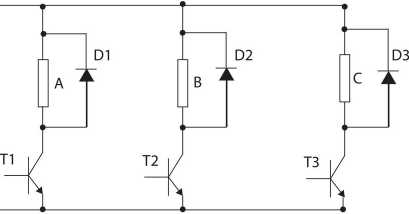
Rysunek 1.6: Sterowanie unipolarne silnika BLDC.
o
o-
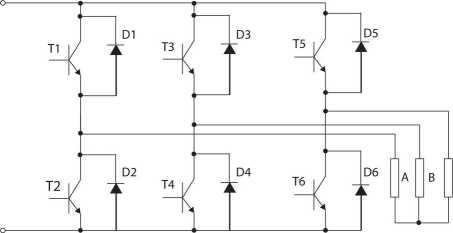
Rysunek 1.7: Sterowanie bipolarne silnika BLDC
Na potrzeby laboratorium zostały zaprojektowane i wykonane sterowniki niskopoziomo-we oparte o procesor ATmega8A. Sterowniki są w stanie wyświetlać wybrane parametry na wyświetlaczu alfanumerycznym, jak również wysyłać dane do komputera na port szeregowy, z wykorzystaniem adaptera USB-UART. Sterowniki są wyposażone w 3 wejścia do pomiaru sygnałów analogowych, jak również 2 wejścia przerwań zewnętrznych. Programowanie następuje z wykorzystaniem złącza ISP. Każdy ze sterowników umożliwia również podłączenie
Wyszukiwarka
Podobne podstrony:
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ćwiczenie i. właściwości dynamiczne elektrycznego zespołu NAPĘDOWEGO ROBOTA Jednocześnie zachodzą
ĆWICZENIE 1. WŁAŚCIWOŚCI DYNAMICZNE ELEKTRYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
ĆWICZENIE 2. WŁAŚCIWOŚCI DYNAMICZNE PNEUMATYCZNEGO ZESPOŁU NAPĘDOWEGO
Ćwiczenie 1Właściwości dynamiczne elektrycznego zespołu napędowego robota Rysunek 1.1: Stanowisko
Ćwiczenie 2Właściwości dynamiczne pneumatycznego zespołu napędowego robota2.1 Cel
Elektronika w sterowaniu zespołów napędowych Semestr Rodzaj zajęć Liczba godzin Liczba punktów
DSC00499 (13) Wyznaczanie ładunku właściwego Jj ełektronu Vvm*g***iJ* do ćwiczenia uvlkości opisując
1 (368) Instytut Systemów Inżynierii Elektrycznej ZESPÓŁ SYSTEMÓW POMIAROWYCH Ćwiczenie 10Pomiary en
więcej podobnych podstron