8265159838
Autoreferat pracy doktorskiej widoczne jest nasycanie się obwodu magnetycznego stojana w obszarze bliskim szczeliny powietrznej. W przypadku pracy synchronicznej rozkład pola jest znacząco odmienny (rys. 4.5). Zasilane są wszystkie uzwojenia prądem sinusoidalnie zmiennym. Jak opisano w rozdz. 4.4 rozprawy doktorskiej, przy położeniu neutralnym biegnika i znamionowym kącie obciążenia największemu nasyceniu ulegają segmenty skrajny lewy i drugi od prawej. W pozostałych segmentach wartość indukcji magnetycznej jest znacznie mniejsza.
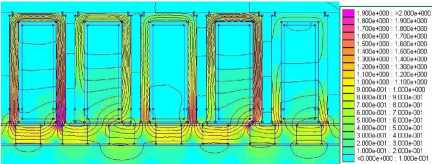
Rys. 4.5. Linie sił pola w prototypie nr 1 przy położeniu neutralnym biegnika i kącie
znamionowym obciążenia (Im—8 A)
5. Obliczenia wielowariantowe silnika krokowego
W projektowaniu maszyn elektrycznych dąży się do otrzymania możliwie najlepszych parametrów pracy (np. moment obrotowy, siła ciągu, prędkość itp.) przy minimalnym zużyciu materiałów stosowanych do ich produkcji. W tym celu najczęściej wykorzystuje się algorytmy optymalizacji. Podejście takie w większości przypadków nie daje informacji pośrednich o tym, jak poszczególne zmiany wpływają na parametry maszyny, co jest ważne z punktu widzenia projektanta. W związku z tym, w większości przypadków wykonuje się obliczenia wielowariantowe, w których bada się wpływ zmian, co najwyżej kilku parametrów, na wybrane charakterystyki maszyny.
W niniejszej pracy przedstawiono obliczenia wielowariantowe dotyczące zmian w konstrukcji silnika liniowego tubowego z magnesami trwałymi w obrębie stojana i biegnika. Obliczenia wykonano dla dwóch rodzajów pracy silnika: krokowej i synchronicznej. W przypadku pracy krokowej przyjęto dwa możliwe stany zasilania pojedynczej fazy: brak prądu oraz prąd znamionowy 7N=8 A. Zarówno w przypadku braku zasilania, jak i przy zasilaniu znamionowym, rozważano charakterystyki siły w funkcji przemieszczenia biegnika dla zakresu położeń od 0 do 15 mm (długość podziałki biegunowej). Wyznaczono wartość maksymalną i średnią siły znamionowej oraz zaczepowej.
Celem uporządkowania wyników obliczeń wprowadzono dodatkowe oznaczenia dla modeli obliczeniowych. Dla pracy krokowej, w każdym podpunkcie dotyczącym zmiany wymiaru geometrycznego, jako model Axx oznaczono silnik o najmniejszej wartości maksymalnej siły zaczepowej (otrzymanej w ramach danych obliczeń przy założeniu braku zasilania silnika), gdzie xx oznacza kolejno numer rozdziału i podrozdziału rozprawy doktorskiej z opisem danej modyfikacji konstrukcji (np. model A62 oznacza, że zmiany w geometrii silnika zostały opisane w rozdziale 6.2). Jako model Bxx oznaczono silnik o największej maksymalnej wartości siły ciągu.
W prezentowanych obliczeniach wartość maksymalna siły oznacza największą wartość bezwzględną siły magnetycznej, otrzymaną z obliczeń dla zakresu suwu biegnika od 0 do rp.
- 12-
Wyszukiwarka
Podobne podstrony:
Autoreferat pracy doktorskiej wpul jest praktycznie stała. W tabeli 6.1 zamieszczono wartości sił i
Autoreferat pracy doktorskiej Najbardziej korzystna wartość tego współczynnika wynosi wpul = 0,065 i
Autoreferat pracy doktorskiej konstrukcja osiowo-symetryczna cechuje się najlepszym wykorzystaniem
Autoreferat pracy doktorskiej z kolei uzyskanie korzystnego stosunku siły ciągu do masy silnika. Cec
Autoreferat pracy doktorskiej Tabela 4.1. Wymiary prototypu nr 1 silnika Wymiar Wartość
Autoreferat pracy doktorskiej Dotyczy to zarówno znamionowej siły ciągu, jak i zaczepowej. Podobnie
Autoreferat pracy doktorskiej tej siły występują dla zakresu grubości jarzma 1,5=2,5 mm, natomiast
Autoreferat pracy doktorskiej Tabela 5.1. Porównanie prototypu nr 1 z modelami otrzymanymi z oblicze
Autoreferat pracy doktorskiej wewnętrzny magnesu). W wyniku analizy silnika otrzymano wartości siły
Autoreferat pracy doktorskiej Ze względu na ułożenie segmentów stojana względem biegnika, gwiazda
Autoreferat pracy doktorskiej nie powoduje zwiększenia wartości siły ciągu. Stąd w tabeli 6.1 zamies
Autoreferat pracy doktorskiej Spis treści 1.
Autoreferat pracy doktorskiej1. Wprowadzenie Silniki liniowe służą do generacji ruchu postępowego be
Autoreferat pracy doktorskiej płasko-prostopadłym [99], co pociąga za sobą znaczne skrócenie czasu
Autoreferat pracy doktorskiej Indukcyjność statyczną obliczono jako iloraz strumienia skojarzonego z
Autoreferat pracy doktorskiej Powyższe równania zostały wyprowadzone przy założeniu wymuszenia
Autoreferat pracy doktorskieja) Mieszany warunek brzegowy
Józef Wilbik, por. [V. 1]. Kolejna obrona pracy doktorskiej, Jana Antosika, odbywa się już 6 marca 1
więcej podobnych podstron