8265159845
Autoreferat pracy doktorskiej
Najbardziej korzystna wartość tego współczynnika wynosi wpul = 0,065 i jest osiągana dla wm =3 mm oraz Rri =3 mm (tabela 6.1, model C73). Generalnie w celu otrzymania małych wartości pulsacji siły należy stosować magnesy o szerokości wm = 3^6mm. Jednakże, w tym zakresie wymiarów nie można osiągnąć największych możliwych wartości siły. Kompromisem może być w tym przypadku stosowanie magnesów o szerokości i promieniu wewnętrznym w przybliżeniu równym szerokości pierścieni ferromagnetycznych.
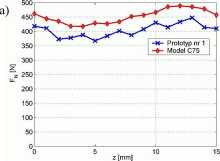
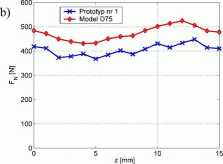
Rys. 6.6. Charakterystyka siły w funkcji położenia dla znamionowego kąta obciążenia silnika synchronicznego: a) porównanie prototypu nr 1 z modelem C75, b) porównanie prototypu nr 1 z modelem D75
Poprzez zmianę kształtu zębów stojana można uzyskać zarówno zmniejszenie współczynnika pulsacji siły (model C75, rys. 6.6a), jak również zwiększenie wartości siły ciągu (model D75, rys. 6.6b). W przypadku modelu C75 uzyskano około 25% zmniejszenie współczynnika pulsacji (tabela 6.1) przy jednoczesnym blisko 10% wzroście wartości siły ciągu. Poszerzenie końcówek zębów stojana (tabela 6.1, model D75) pozwala z kolei na blisko 20% zwiększenie siły bez pogorszenia współczynnika pulsacji.
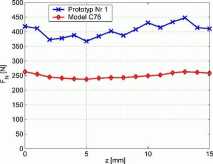
Rys. 6.7. Zależność siły od położenia biegnika dla prototypu nr 1 oraz modelu C76 (znamionowy kąt obciążenia dla silnika synchronicznego)
Zakres zmian kształtu pierścieni ferromagnetycznych w biegniku był taki sam, jak dla pracy krokowej silnika (rozdz. 5, rys. 5.Id). Także tutaj, ze względu na dużą liczbę zmiennych parametrów, spośród analizowanych przypadków wybrano model o najmniejszym współczynniku pulsacji. Żadna z rozważanych modyfikacji pierścienia ferromagnetycznego
- 19-
Wyszukiwarka
Podobne podstrony:
Autoreferat pracy doktorskiej z kolei uzyskanie korzystnego stosunku siły ciągu do masy silnika. Cec
Autoreferat pracy doktorskiej Tabela 4.1. Wymiary prototypu nr 1 silnika Wymiar Wartość
Autoreferat pracy doktorskiej wewnętrzny magnesu). W wyniku analizy silnika otrzymano wartości siły
Autoreferat pracy doktorskiej wpul jest praktycznie stała. W tabeli 6.1 zamieszczono wartości sił i
Autoreferat pracy doktorskiej nie powoduje zwiększenia wartości siły ciągu. Stąd w tabeli 6.1 zamies
Autoreferat pracy doktorskiej widoczne jest nasycanie się obwodu magnetycznego stojana w obszarze bl
Autoreferat pracy doktorskiej Dotyczy to zarówno znamionowej siły ciągu, jak i zaczepowej. Podobnie
Autoreferat pracy doktorskiej tej siły występują dla zakresu grubości jarzma 1,5=2,5 mm, natomiast
Autoreferat pracy doktorskiej Tabela 5.1. Porównanie prototypu nr 1 z modelami otrzymanymi z oblicze
Autoreferat pracy doktorskiej Ze względu na ułożenie segmentów stojana względem biegnika, gwiazda
Autoreferat pracy doktorskiej Spis treści 1.
Autoreferat pracy doktorskiej1. Wprowadzenie Silniki liniowe służą do generacji ruchu postępowego be
Autoreferat pracy doktorskiej konstrukcja osiowo-symetryczna cechuje się najlepszym wykorzystaniem
Autoreferat pracy doktorskiej płasko-prostopadłym [99], co pociąga za sobą znaczne skrócenie czasu
Autoreferat pracy doktorskiej Indukcyjność statyczną obliczono jako iloraz strumienia skojarzonego z
Autoreferat pracy doktorskiej Powyższe równania zostały wyprowadzone przy założeniu wymuszenia
Autoreferat pracy doktorskieja) Mieszany warunek brzegowy
więcej podobnych podstron