8265159842
Autoreferat pracy doktorskiej wewnętrzny magnesu). W wyniku analizy silnika otrzymano wartości siły znamionowej mniejsze niż w prototypie nr 1. Dlatego też, wyniki uzyskane dla tego prototypu porównano jedynie z wynikami dla modelu A66 o najmniejszej wartości maksymalnej siły zaczepowej, (tabela 5.1, rys. 5.4). Modyfikacja kształtu przekładki ferromagnetycznej w biegniku pozwala wprawdzie na niemal 4-krotne zmniejszenie siły zaczepowej, jednakże kosztem siły znamionowej, która maleje około 2-krotnie.
6. Tubowy silnik synchroniczny - obliczenia wielowariantowe
Podczas zasilania impulsami prostokątnymi (praca krokowa), praca badanego silnika liniowego w charakterze precyzyjnego pozycjonera nie jest możliwa. W celu osiągnięcia dokładności rzędu kilkudziesięciu mikrometrów konieczne jest zasilenie wielofazowe. Wówczas pozycjoner ten pracuje jako silnik liniowy synchroniczny. Przykładowo, dla rozważanego w niniejszej pracy silnika rozpatrywano zasilanie ze źródła prądu sinusoidalnego 5-fazowego. Ponieważ przy pracy synchronicznej dużym problem są zmiany siły ciągu wraz ze zmianą położenia biegnika (rys. 6.2a), to przeanalizowano wpływ zmian geometrii silnika na siłę znamionową ciągu oraz na wartość współczynnika pulsacji siły. Zmianom podlegały te same wymiary, co w przypadku pracy krokowej silnika (rozdz. 5).
Założono 5-fazowe zasilanie sygnałem prądowym sinusoidalnym o amplitudzie Im = 8 A. W porównaniu z pracą krokową wyznaczono dodatkowo wartość minimalną siły znamionowej i obliczono współczynnik pulsacji siły wpui, który zdefiniowano jako

gdzie FNmax> ^Nmin i ^nav to kolejno wartość maksymalna, minimalna i średnia siły znamionowej ciągu dla suwu biegnika w zakresie jednej podziałki biegunowej tp.
Podobnie jak dla silnika krokowego, także w przypadku pracy synchronicznej wprowadzono pomocnicze oznaczenia modeli obliczeniowych. Model Cxx oznacza silnik o najmniejszych pulsacjach siły znamionowej, gdzie xx to kolejno numer rozdziału i podrozdziału rozprawy doktorskiej zawierającego obliczenia dotyczące konkretnej zmiany geometrii. Model Dxx to z kolei silnik o największej wartości siły znamionowej dla danej zmiany geometrii.
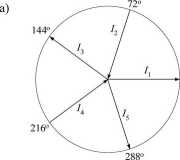

Rys. 6.1. Zasilanie 5-fazowe sinusoidalne silnika: a) gwiazda prądów, b) przebieg czasowy prądów w poszczególnych fazach dla częstotliwości f=5 Hz
- 16-
Wyszukiwarka
Podobne podstrony:
Autoreferat pracy doktorskiej Tabela 4.1. Wymiary prototypu nr 1 silnika Wymiar Wartość
Autoreferat pracy doktorskiej Tabela 5.1. Porównanie prototypu nr 1 z modelami otrzymanymi z oblicze
Autoreferat pracy doktorskiej wpul jest praktycznie stała. W tabeli 6.1 zamieszczono wartości sił i
Autoreferat pracy doktorskiej z kolei uzyskanie korzystnego stosunku siły ciągu do masy silnika. Cec
Autoreferat pracy doktorskiej1. Wprowadzenie Silniki liniowe służą do generacji ruchu postępowego be
Autoreferat pracy doktorskiej widoczne jest nasycanie się obwodu magnetycznego stojana w obszarze bl
Autoreferat pracy doktorskiej Dotyczy to zarówno znamionowej siły ciągu, jak i zaczepowej. Podobnie
Autoreferat pracy doktorskiej tej siły występują dla zakresu grubości jarzma 1,5=2,5 mm, natomiast
Autoreferat pracy doktorskiej Ze względu na ułożenie segmentów stojana względem biegnika, gwiazda
Autoreferat pracy doktorskiej Najbardziej korzystna wartość tego współczynnika wynosi wpul = 0,065 i
Autoreferat pracy doktorskiej nie powoduje zwiększenia wartości siły ciągu. Stąd w tabeli 6.1 zamies
Autoreferat pracy doktorskiej Spis treści 1.
Autoreferat pracy doktorskiej konstrukcja osiowo-symetryczna cechuje się najlepszym wykorzystaniem
Autoreferat pracy doktorskiej płasko-prostopadłym [99], co pociąga za sobą znaczne skrócenie czasu
Autoreferat pracy doktorskiej Indukcyjność statyczną obliczono jako iloraz strumienia skojarzonego z
Autoreferat pracy doktorskiej Powyższe równania zostały wyprowadzone przy założeniu wymuszenia
Autoreferat pracy doktorskieja) Mieszany warunek brzegowy
3.5. Wyniki sił wewnętrznych. Wyniki odczytano z programu komputerowego [9]. Otrzymano: Wartości sil
10. Podsumowanie Całość przeprowadzonych w ramach niniejszej pracy doktorskiej badań z zakresu anali
więcej podobnych podstron