
Podstawy Automatyki
i Sterowania III
Regulatory PID
Jakość regulacji
Modyfikacje algorytmu PID
Dobór nastaw regulatorów
Samostrojenie regulatorów
2
Regulatory
• Definicja
• Typy
• Schemat blokowy
• Własności
• Dobór typu regulatora
3
Regulator
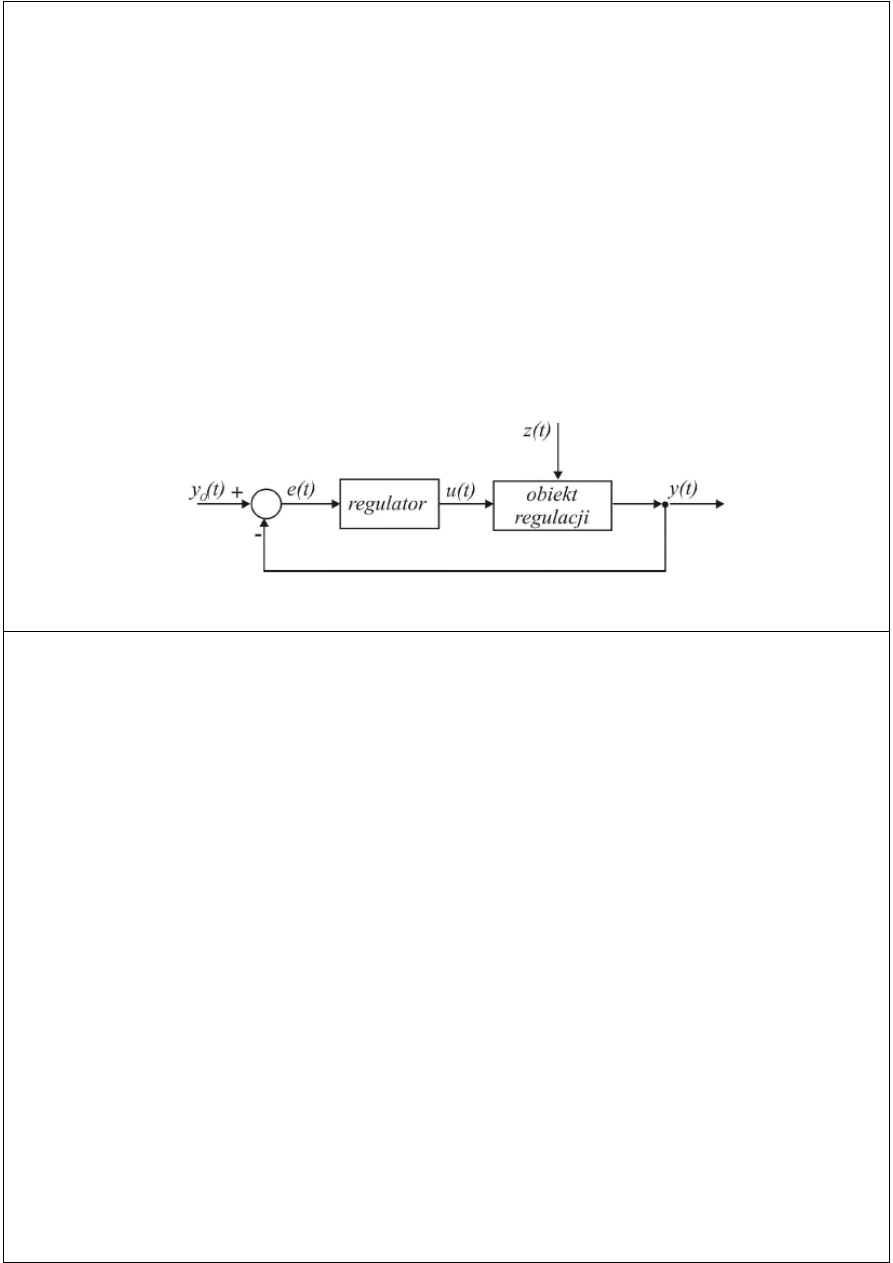
• Regulator - jeden z elementów składających się na obwód
regulacji. Zadanie regulatora polega na wygenerowaniu
odpowiedniego sygnału sterującego, aby obiekt regulowany w jak
najkrótszym czasie osiągał wartość zadaną.
• Regulator służy do doprowadzenia obiektu do żądanego stanu lub
poprawy niekorzystnych cech obiektu regulowanego.
• Regulator może np. poprawić dynamikę obiektu regulowanego
(silnik będzie szybciej osiągał żądaną prędkość). Błędne użycie
może prowadzić do niestabilności obwodu regulacji.
4
Typy regulatorów
• Ciągłego działania:
– P
– PI
– PD
– PID
• Nieciągłego działania
– dwustawne
– trójstawne
– krokowe
– impulsowe
5
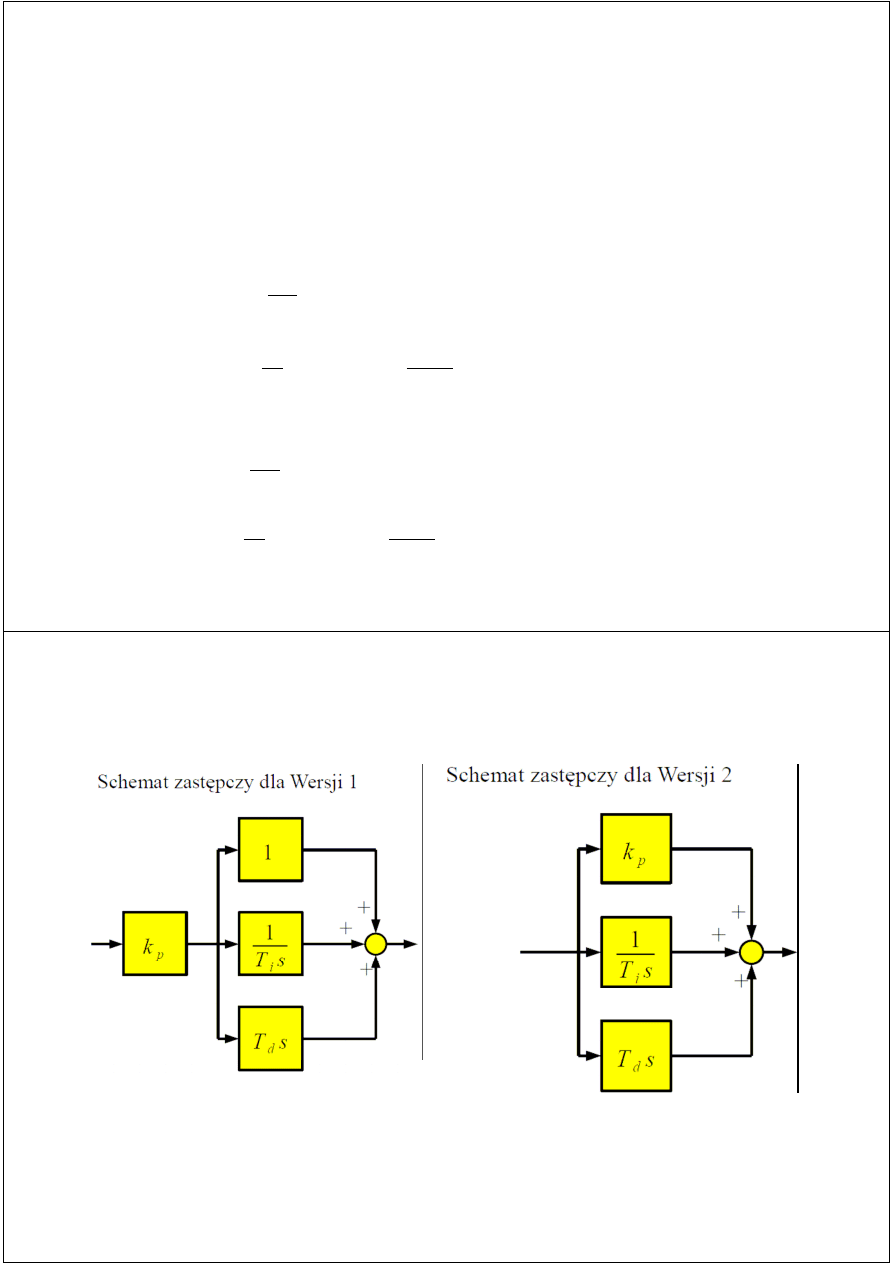
Regulator PID
Regulator jest złożeniem członu proporcjonalnego (P),
całkującego (I) oraz różniczkującego (D). Sygnał wyjściowy
regulatora można opisać wzorem (wersja I lub II):
∫
∫
+
+
=
+
+
=
+
+
=
+
+
=
t
D
I
P
D
I
P
t
D
I
P
D
I
P
dt
t
de
T
d
e
T
k
t
u
s
T
s
T
k
s
R
dt
t
de
T
d
e
T
k
t
u
s
T
s
T
k
s
R
0
0
)
(
)
(
1
)
(
1
)
(
:
II
Wersja
)
(
)
(
1
1
)
(
1
1
)
(
:
I
Wersja
τ
τ
τ
τ
6
Regulator PID – schemat blokowy
7
Własności regulatorów liniowych
Części sygnału wyjściowego z regulatora:
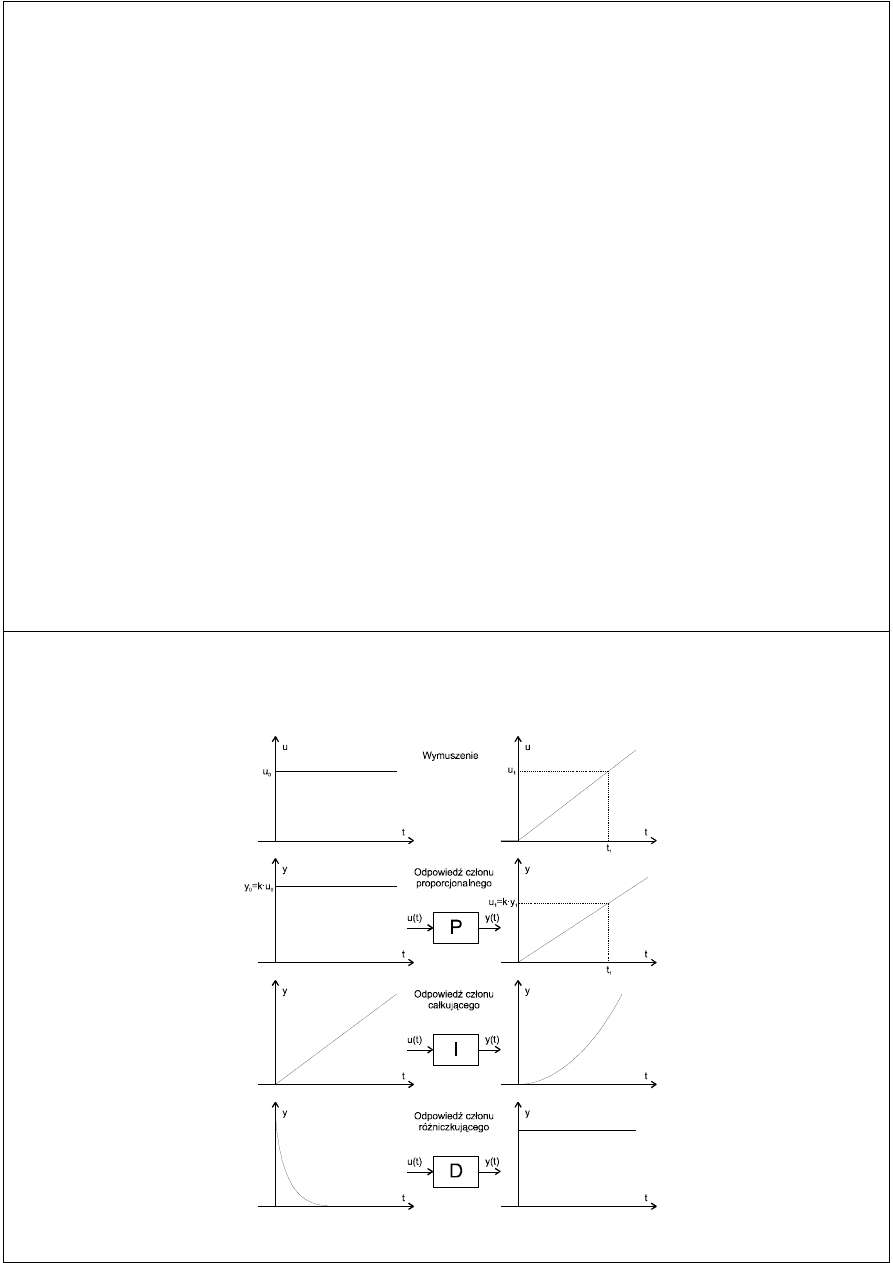
• Składowa proporcjonalna (P) – powoduje zmniejszenie
błędów statycznych, zmniejsza czas regulacji
• Składowa całkująca (I) – całka z sygnału uchybu;
likwiduje całkowicie błędy statyczne, znacznie wydłuża
czas regulacji, może spowodować wyjście poza granicę
stabilności
• Składowa różniczkująca (D) – pochodna z sygnału
uchybu; występuje tylko w stanach przejściowych,
powoduje zmniejszenie czasu regulacji przez
przyspieszenie początkowej fazy procesu przejściowego
• Nastawy regulatora: K
P
, T
I
, T
D
8
Składowe regulatora
9
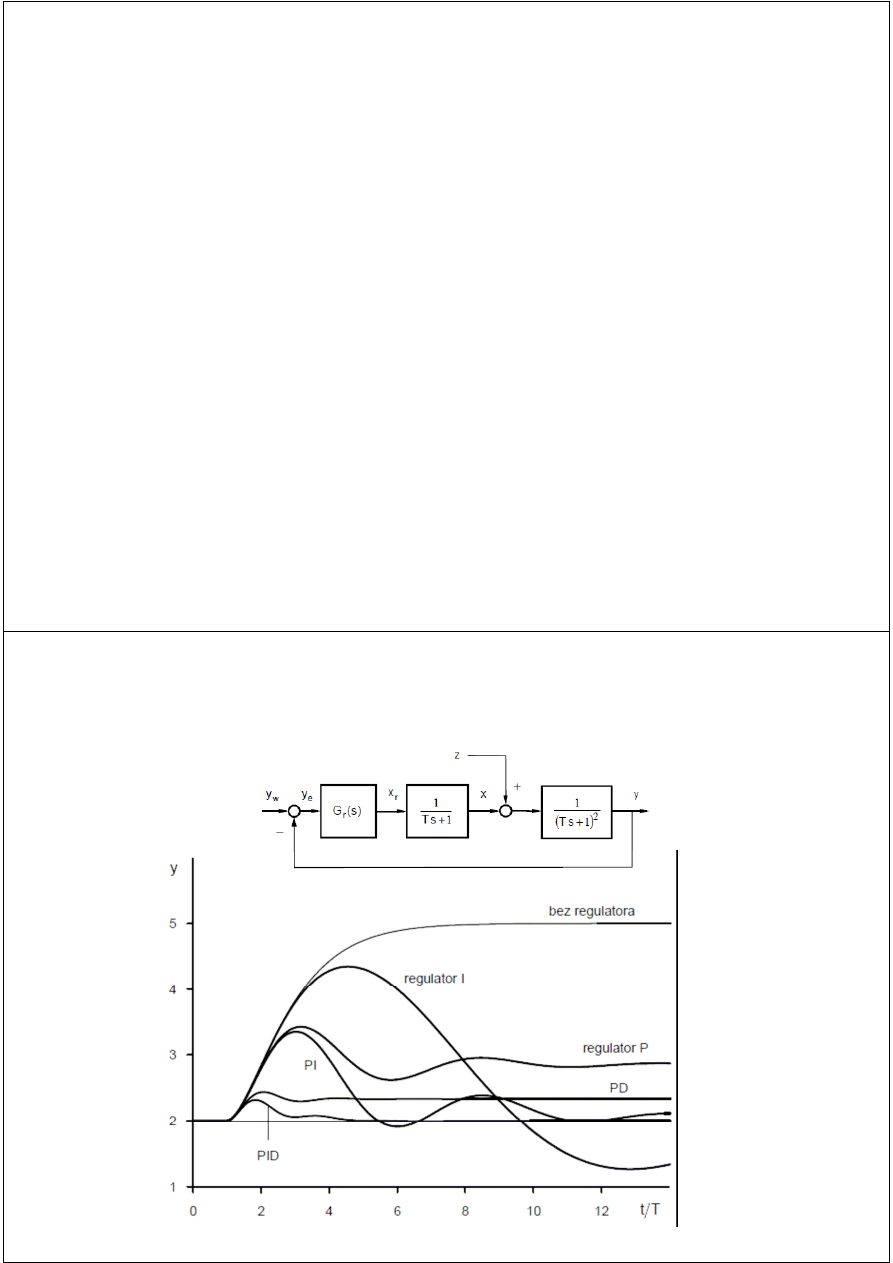
Dobór regulatorów liniowych
• Zmniejszenie błędu statycznego
- regulator typu P
• Likwidacja błędu statycznego, wydłużenie czasu reakcji,
dobra jakość przy zakłóceniach o małych częstotliwościach
- regulator typu PI
• Zmniejszenie błędu statycznego, skrócenie czasu reakcji,
gorsza jakość przy mniejszych częstotliwościach,
wzmocnienie szumów przetwornika pomiarowego
- regulator typu PD
• Likwidacja błędu statycznego, skrócenie czasu reakcji
- regulator typu PID
10
Efekt działania regulatorów
11
Orientacyjny dobór regulatorów
W przypadku obiektów statycznych można posłużyć się stosunkiem
zastępczego czasu opóźnienia do zastępczej stałej czasowej:
• T
0
/ T < 0,1 – obiekt łatwy do regulacji – może być zastosowana
regulacja dwustawna,
• 0,1 < T
0
/ T < 0,2 – obiekt nieco trudniejszy – dla obiektów o
niewielkich zmianach obciążenia można stosować regulację
dwustawną z korekcją w sprzężeniu zwrotnym, w innych
przypadkach należy stosować regulatory ciągłe PI lub PID,
• 0,2 < T
0
/ T < 0,7 – obiekty trudne do regulacji – należy stosować
regulatory ciągłe lub krokowe PI lub PID,
• 0,7 < T
0
/ T – obiekty bardzo trudne do regulacji - stosuje się
regulatory impulsowe lub regulatory specjalne (z predyktorami).
12
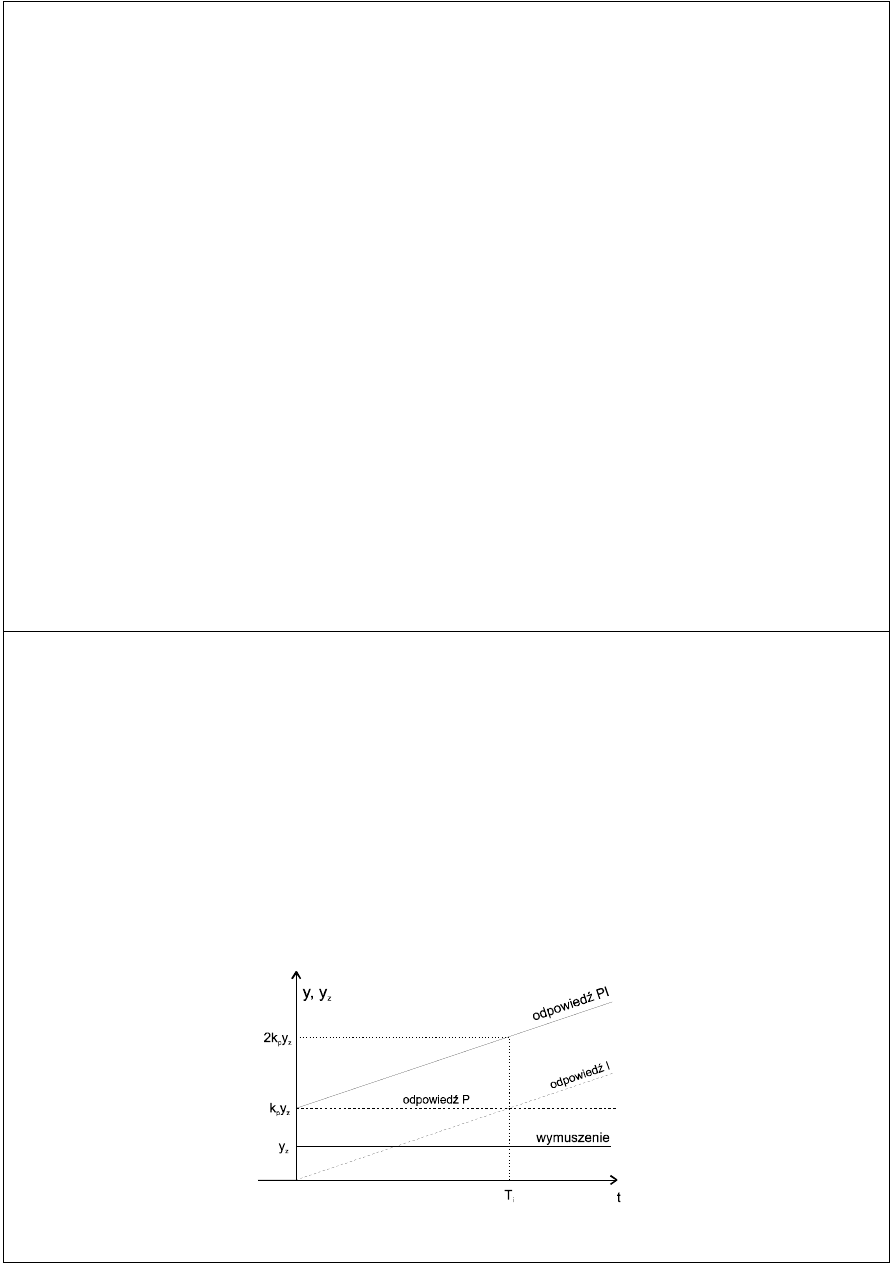
Czas zdwojenia
• Czas zdwojenia (T
I
) określa szybkość zmian sygnału wyjściowego
przy stałej wartości sygnału uchybu; jest to czas, po którym sygnał
wyjściowy regulatora PI osiąga (po wymuszeniu skokowym)
dwukrotnie większą wartość niż miałoby to miejsce w regulatorze
typu P. Liczbowo czas zdwojenia jest równy stałej czasowej
całkowania członu całkującego. Im dłuższy czas zdwojenia
ustawiony na regulatorze, tym słabsze jest działanie akcji
całkującej. Nastawienie na regulatorze czasu zdwojenia równego
∞ jest równoznaczne z wyłączeniem akcji całkującej.
13
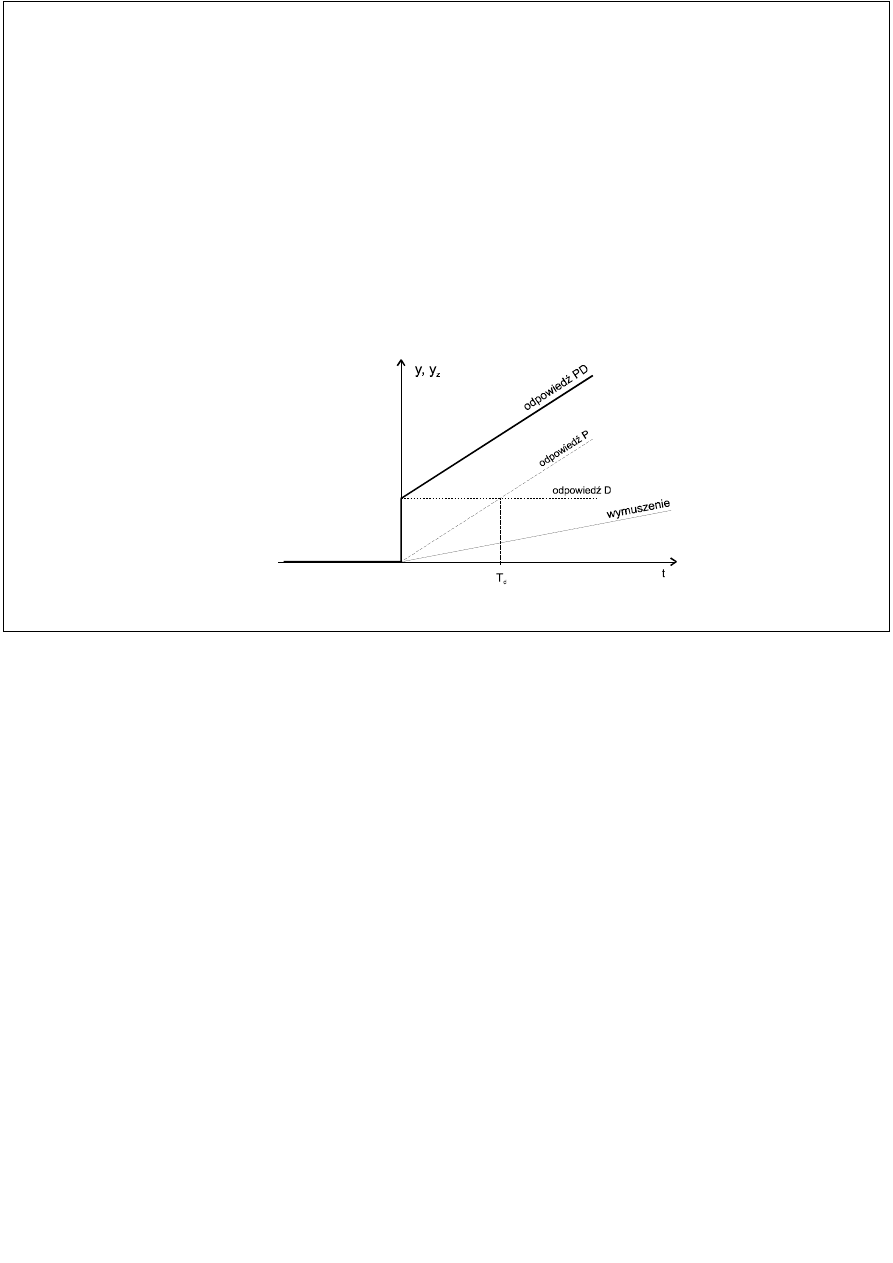
Czas wyprzedzenia
• Czas wyprzedzenia (T
D
) określa właściwości różniczkujące
regulatora i jest liczbowo równy stałej czasowej różniczkowania.
Różniczkowanie powoduje wprowadzenie do sygnału
wyjściowego regulatora składnika proporcjonalnego do szybkości
zmian uchybu, więc w przypadku stałej szybkości zmian uchybu
sygnał wyjściowy regulatora ulega jak gdyby wyprzedzeniu w
stosunku do składnika proporcjonalnego w sygnale regulatora. Im
dłuższy czas wyprzedzenia, tym intensywniejsze jest działanie
akcji różniczkującej regulatora. Nastawienie czasu różniczkowania
na wartość 0 jest równoznaczne z wyłączeniem akcji
różniczkującej.
Wyszukiwarka
Podobne podstrony:
01 aeid 3052 Nieznany (2)
NLP Magazine 01 id 320421 Nieznany
I CKN 316 01 1 id 208193 Nieznany
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
domowe2 01 id 140222 Nieznany
CHORZOW1 TRAGEDIA 28 01 2006 id Nieznany
01 Uprawnienia w budownictwieid Nieznany
Genetyczna regulacja embriogene Nieznany
Cwiczenie 01 id 98935 Nieznany
HUR2006 01 id 207254 Nieznany
01 przedmowa zg6kmxuegzl2pilvqx Nieznany (2)
712[06] S1 01 Rozpoznawanie mat Nieznany
01 Wprowadzenieid 2669 Nieznany
gazeta prawna 25 01 2005 (1382) Nieznany
01 Niezgodnaid 2863 Nieznany
05 Dobor nastaw regulatora w ko Nieznany (2)
714[01] Z1 01 Dobieranie materi Nieznany (2)
01 2id 2523 Nieznany (2)
więcej podobnych podstron