1
1.
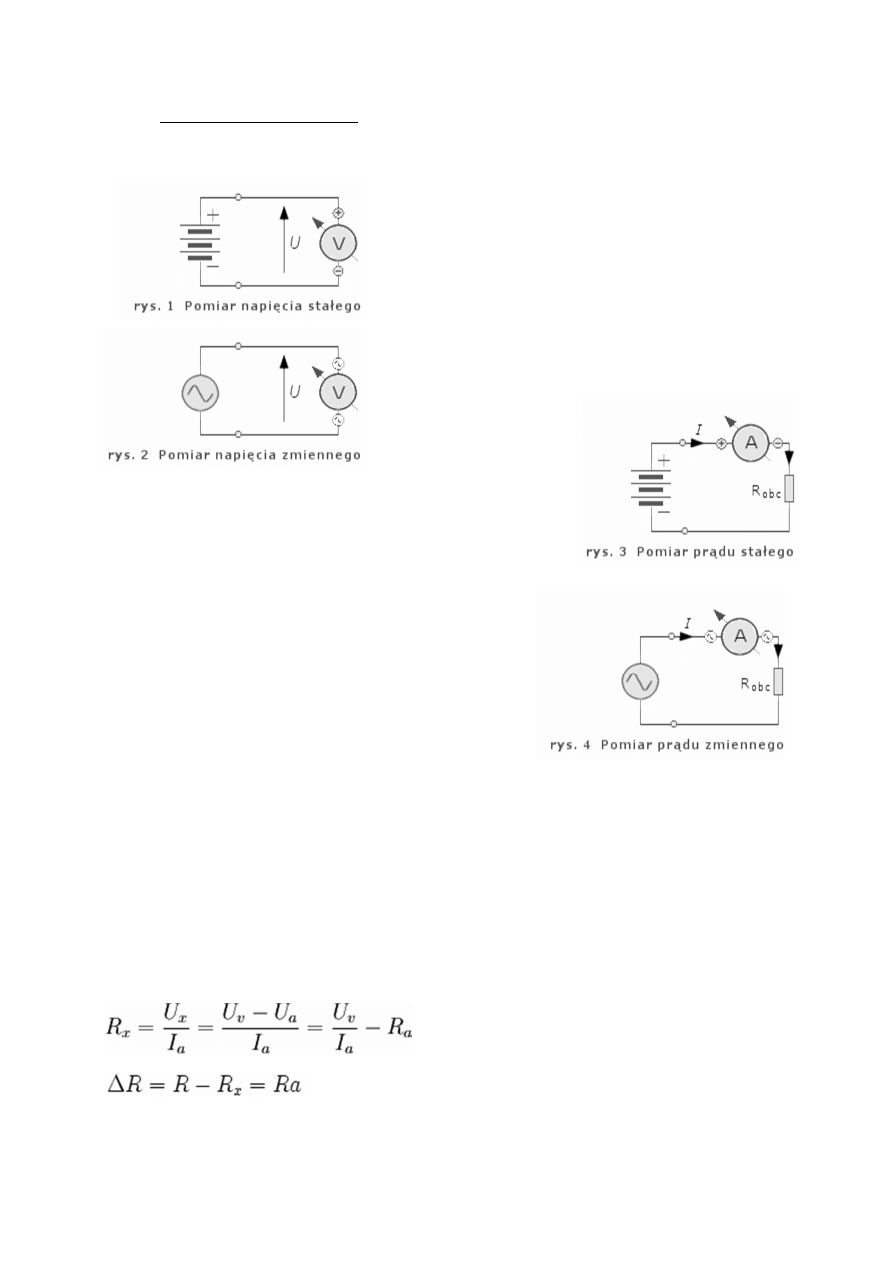
Pomiar napięcia i prądu stałego
Zaczniemy od woltomierza. Woltomierz wpinamy do układu równolegle. Takie włączenie wynika z konstrukcji
tego miernika. W podstawowy skład każdego woltomierza wchodzą: amperomierz i opornik dodatkowy Rd -
szeregowy. Amperomierz (ustrój) ma zazwyczaj małą oporność wewnętrzną (im mniejszy prąd jest wymagany
do pełnego wychylenia miernika, tym większa jest oporność cewki
ustroju - używa się cieńszego drutu do jej nawinięcia), aby wywołać
jego pełne wychylenie należy spowodować przepływ prądu o
wartości maksymalnej dla danego typu ustroju np. 100uA.
Przepływający prąd, wytwarza pewien spadek napięcia na cewce
ustroju. Aby można było dokonywać pomiaru większych napięć od
wartości spadku napięcia na ustroju, musimy szeregowo z
amperomierzem włączyć opornik dodatkowy. Pomiar odbywa się
poprzez wyznaczenie natężenia prądu płynącego przez woltomierz,
który charakteryzuje się znaczną opornością wewnętrzną.
A
teraz
amperomierz
-
włączamy go do układu zawsze
szeregowo.
Podstawowa
konstrukcja zawiera w sobie
dwa
elementy,
ustrój
pomiarowy i opornik równoległy Rb, zwany potocznie bocznikiem. Zasada
pracy opiera się na podstawowym prawie (I prawo Kirchhoffa) algebraicznej
sumy prądów wypływających z węzła i sumy prądów dopływających do
węzła. Wynika że, przy pomiarze dużych prądów, znacznie przekraczających
wartość prądu potrzebnego do wychylenia ustroju, znaczna jego część musi
przepływać przez opornik Rb. Działanie amperomierza opiera się na
pomiarach
efektów
elektromagnetycznych,
cieplnych
itp.,
wywołanych przepływającym prądem. Włącza się go szeregowo do
obwodu elektrycznego, w związku, z czym istotną cechą jest jego
niewielka oporność wewnętrzna, nie wpływająca na wartość
mierzonego prądu. Amperomierze klasyfikuje się ze względu na:
rodzaj mierzonego prądu (amperomierze prądu stałego i
przemiennego - te ostatnie mierzą wartość skuteczną, rzadziej
średnią), wartość mierzonego prądu (mikro-, miliamperomierze lub
kiloamperomierze - duży zakres pomiaru uzyskuje się przez
zastosowanie boczników lub przekładników prądowych w
przypadku prądu zmiennego), konstrukcję (np. magnetoelektryczny, elektromagnetyczny, cieplny), rodzaj
wskazań (analogowy, cyfrowy).
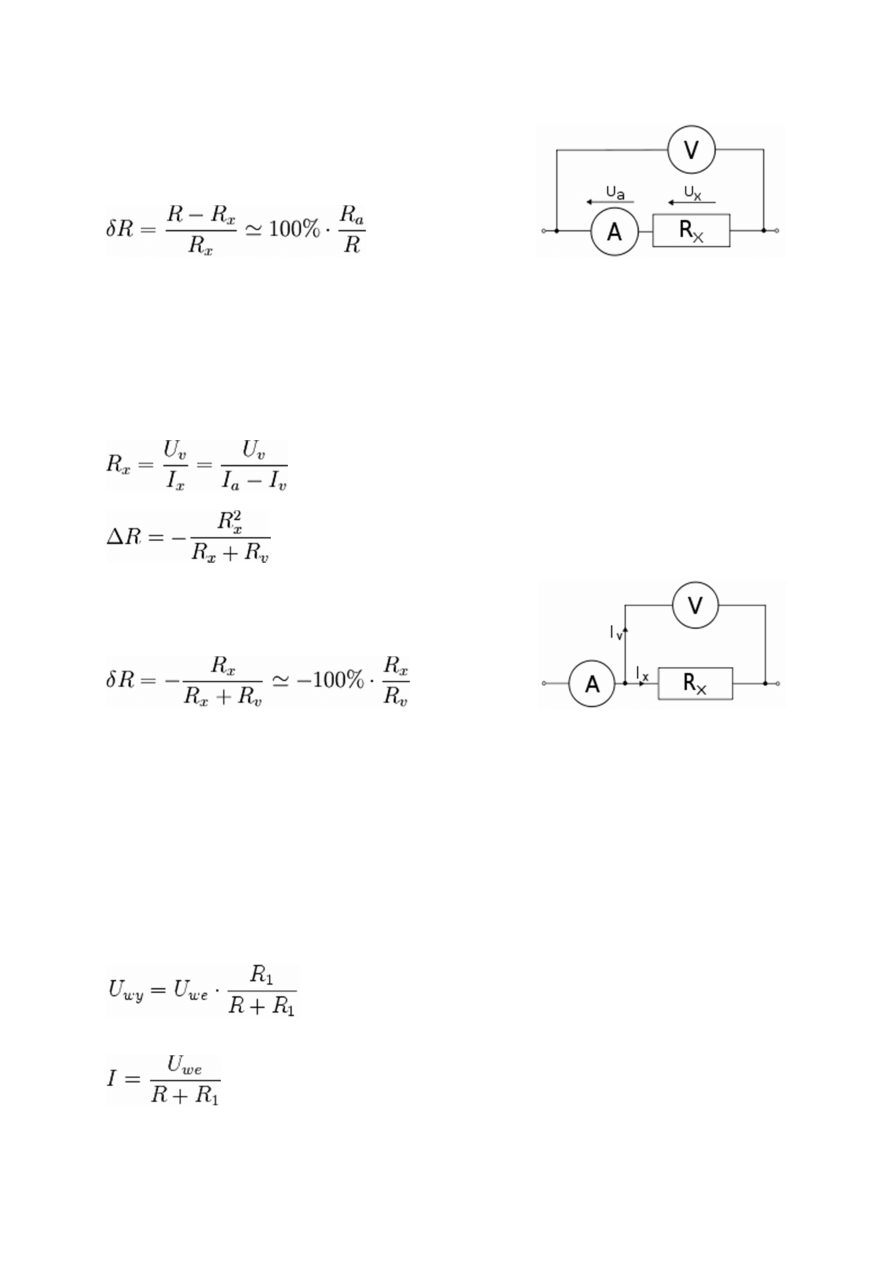
Pomiar rezystancji metodą techniczną, układ poprawnego napięcia i popranego prądu
Poprawny pomiar prądu jest jednym z pośrednich sposobów wyznaczenia rezystancji. Sposób ten stosowany
jest przy pomiarach dużych oporności, gdyż w takim przypadku dołączenie amperomierza (którego rezystancja
wewnętrzna Ra << Rx oraz Ra dąży do 0) w takim układzie wprowadzi niezmiernie małe odchylenia wartości
pomiarowej prądu - pominie prądy płynące przez woltomierz.
Polega on na dokonaniu pomiaru z pomocą woltomierza i amperomierza włączonych do układu w taki sposób,
że dokonujemy pomiaru prądu "rzeczywistego" przepływającego przez opornik, a jedynym zakłóceniem jest to,
że woltomierz wskazuje napięcie odkładające się nie tylko na rezystorze ale i na amperomierzu. Dlatego też,
wykorzystując prawo Ohma, musimy uwzględnić że napięcie Ux rezystora zależy od dwóch wartości - napięcia
Uv odłożonego na woltomierzu i napięcia Ua odłożonego na amperomierzu:
Systematyczny błąd względny wniesiony do wartości pomiaru przez włączenie mierników do obwodu:
2
Systematyczny błąd bezwzględny wniesiony do wartości pomiaru przez włączenie mierników do obwodu:
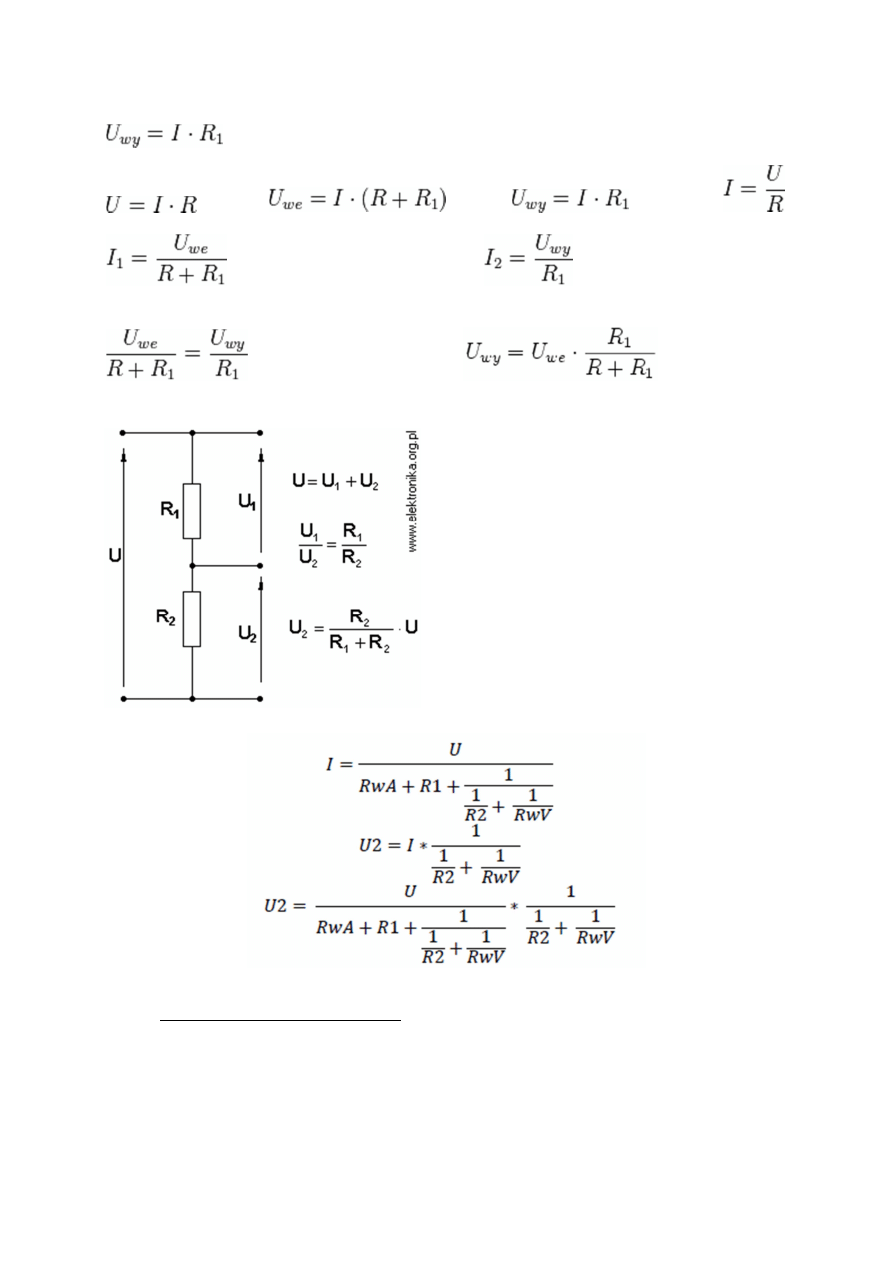
Poprawny pomiar napięcia jest jednym z pośrednich sposobów wyznaczenia rezystancji. Sposób ten stosowany
jest prz pomiarach małych rezystancji, gdyż dołączenie woltomierza (którego rezystancja wewnętrzna Rv >> Rx
oraz Rv dąży do nieskończoności) w tym układzie wprowadzi pomijalnie małe odchylenia wartości pomiarowej -
pominie napięcia odłożone na amperomierzu.
Polega on na dokonaniu pomiaru z pomocą woltomierza i amperomierza włączonych do układu w taki sposób,
że dokonujemy pomiaru napięcia "rzeczywistego" odkładającego się na oporniku, a jedynym zakłóceniem jest
to, że amperomierz wskazuje prąd przepływający nie tylko przez rezystor ale i upływający na woltomierzu.
Dlatego też, wykorzystując prawo Ohma, musimy uwzględnić że prąd Ix przepływający przez rezystor zależy od
dwóch wartości - prądu Ix płynącego przez rezystor i prądu Iv płynącego przez woltomierz:
Systematyczny błąd bezwzględny wniesiony do wartości pomiaru przez włączenie mierników do obwodu:
Systematyczny błąd względny wniesiony do wartości pomiaru przez włączenie mierników do obwodu:
Pozostaje jeszcze do omówienia zasada pomiaru prądu przez multimetry cyfrowe. Młodzi adepci elektroniki
zadadzą pewnie pytanie w rodzaju: "...przecież tam nie ma ustroju pomiarowego, to jak rozdzieli się prąd?" I
tutaj dotykamy sedna pomiaru. Jak wiemy w większości multimetrów operujemy napięciem na wejściu
przetwornika pomiarowego np. popularnej kostki 7107 (min. zakres napięcia wejściowego to 200mV). Jak
zatem dokonywany jest pomiar prądu? Poprzez pomiar spadku napięcia na opornikach dodatkowych. Prąd
wejściowy przetwornika jest tak mały, że praktycznie pomijalny, jeżeli do wejścia przetwornika dopniemy
równolegle rezystor o znanej wartości to przepływający przez niego prąd wywoła na nim spadek napięcia, który
zmierzymy naszym przetwornikiem.
Dzielnik napięciowy (wyprowadzenie wzoru), wpływ rezystancji wew. woltomierza i amperomierza na
działanie dzielnika (wyprowadzenie wzoru)
Dzielnik napięcia jest specjalnym szeregowym połączeniem dwóch lub więcej pasywnych elementów
elektrycznych, np. oporników. Napięcie wyjściowe nieobciążonego dzielnika zasilanego jest zawsze mniejsze od
napięcia zasilania i zależy tylko od stosunku wartości użytych oporników oraz wartości napięcia wejściowego:
Wynika to z faktu, że natężenie prądu elektrycznego płynącego przez nieobciążony dzielnik napięcia ma wartość
taką samą dla obu elementów:
3
natomiast spadek napięcia na oporniku R1 wynosi:
Wyprowadzenie głównego wzoru Uwy przy użyciu powyższych informacji można przeprowadzić następująco:
/
/
/
/
Natężenie jest takie samo, przy założeniu, że dzielnik napięcia nie jest obciążony: I1 = I2
/
Lub
Metodę poprawnego prądu stosujemy wtedy, kiedy
mierzy opornik ma spodziewany opór kilka rzędów
mniejszy niż opór wewnętrzny podłączonego do
równolegle woltomierza. Wtedy można przyjąć wyniki za
dokładne bez dokonywania w obliczeń, które w bardziej
skomplikowanych układach mogłyby być trudne do
wykonania.
Metodę poprawnego napięcia stosujemy wtedy, kiedy
mierzony opornik ma spodziewany opór kilka rzędów
większy
niż
opór
wewnętrzny
zastosowanego
amperomierza. Tylko wtedy można przyjąć dokonane
pomiary jako prawdziwe z dobrą dokładnością bez
dokonywania obliczeń.
Obliczenia dla dzielnika napięcia z uwzględnieniem
rezystancji
przyrządów
pomiarowych
wyglądają
następująco:
2.
Pomiar napięcia i prądu przemiennego
Budowa i działanie analogowego woltomierza i amperomierza dla prądu przemiennego
Definicja wartości max., skutecznej, amplitudy, Vp-p, wyjaśnić pojęcie „True RMS”
Napięcie skuteczne jest to takie napięcie, które równe jest stałemu napięciu przyłożonemu do danego oporu,
które powoduje wydzielanie się na tym oporze takiej samej energii. Dla napięcia sinusoidalnego o wartości
maksymalnej równej U0 napięcie skuteczne Usk wynosi:
4
Amplituda to największe wychylenie z położenia równowagi.
Napięcie Vp-p (pik-pik) to napięcie mierzone od szczytu do szczytu.
Mierniki elektryczne podają zwykle wartość skuteczną sygnału (nie maksymalną!). W prostszych rozwiązaniach
jest ona wyliczana z zależności a poprawny wynik otrzymywany jest jedynie dla przebiegów sinusoidalnych.
Mierniki lepszej klasy pozwalaja na pomiar wartości skutecznej przebiegów odkształconych. Obliczają ją z
zależności. Mierniki takie są opisane jako "true RMS", czyli że mierzą rzeczywistą ("prawdziwą") wartość
skuteczną i są dużo droższe.
Działanie prostownika jednopołówkowego
Prostownikiem jednopołówkowym nazywamy taki prostownik, w którym po procesie prostowania pozostają
tylko te części przebiegu, które są jednego znaku a części przeciwnego znaku pozostają wyeliminowane.
Najprostszym prostownikiem jest pojedyncza dioda prostownicza wpięta w układ napięcia przemiennego.
Pomimo prostoty takiego układu jest on bardzo rzadko stosowany z uwagi na występowanie dużego tętnienia
napięcia wyjściowego. Dodatkowo, energia dostarczana przez źródło wykorzystywana jest tylko przez pół
okresu - podczas drugiej połowy okresu napięcie jest po prostu blokowane i prąd w układzie nie płynie.
3.
System pomiarowy z komputerem
Interfejs RS232C – podstawowe informacje
Standard RS-232 opisuje sposób połączenia urządzeń DTE (ang. Data Terminal Equipment) tj. urządzeń
końcowych danych (np. komputer) oraz urządzeń DCE (ang. Data Communication Equipment), czyli urządzeń
komunikacji danych (np. modem). Standard określa nazwy styków złącza oraz przypisane im sygnały a także
specyfikację elektryczną obwodów wewnętrznych. Standard ten definiuje normy wtyczek i kabli portów
szeregowych typu COM. Standard RS-232 (ang. Recommended Standard) opracowano w 1962 roku na zlecenie
amerykańskiego stowarzyszenia producentów urządzeń elektronicznych w celu ujednolicenia parametrów
sygnałów i konstrukcji urządzeń zdolnych do wymiany danych cyfrowych za pomocą sieci telefonicznej.
RS-232 jest magistralą komunikacyjną przeznaczoną do szeregowej transmisji danych. Najbardziej popularna
wersja tego standardu, RS-232C pozwala na transfer na odległość nie przekraczającą 15 m z szybkością
maksymalną 20 kbit/s. W architekturze PC standardowo przewidziano istnienie 4 portów COM oznaczanych
odpowiednio COM1-COM4. Specjalizowane karty rozszerzeń pozwalały na podłączenie znacznie większej ilości
portów RS-232, jednak nie były one standardowo obsługiwane przez MS-DOS i wymagały specjalistycznego
oprogramowania. W przypadku komputerów PC porty RS-232 początkowo obsługiwane były przez układy 8250
(PC, XT), później 16450 (AT, 80386, pierwsze i486), następnie przez zintegrowane z płytą główną 16550A.
Układy te są ze sobą wstecznie zgodne, jednak kolejne wersje posiadają coraz większy bufor FIFO. Kość 16550A
posiada standardowo bufor 2x 16b. Zwiększenie długości kolejki FIFO skutkowało obniżeniem częstotliwości
przerwań generowanych przez port przy przesyłaniu danych. Na potrzeby zastosowań profesjonalnych (np.
równoczesna obsługa wielu szybkich modemów w systemach typu BBS) stosowano często specjalizowane karty
RS-232 z jeszcze większymi buforami (np. 16650 czy karty procesorowe). Znane były rozwiązania pozwalające
na podłączenie do 1024 urządzeń RS-232, przy zachowaniu pełnej prędkości per port i buforami rzędu 1024
bajty na port. Część kart tego typu pozwalała także na ustawianie wyższego zegara wskutek czego bitrate na
wyjściu układu był wyższy niż ustawienia programowe – przy dużej wielkości kolejki FIFO pozwalało to na
uzyskiwanie wysokich (często niestandardowych – jak w przypadku modemów ZyXel 76800 bps) prędkości.
Spotkać można było na rynku modemy komunikujące się z portem RS-232 z prędkościami do 421 kbit, a nawet
921,6 kbit (np. Yuko, Goramo).
Poziomy napięć dla interfejsu RS232C
Specyfikacja napięcia definiuje "1" logiczną jako napięcie -3V do -15V, zaś "0" to napięcie +3V do +15V. Poziom
napięcia wyjściowego natomiast może przyjmować wartości -12V, -10V, +10V, +12V, zaś napięcie na dowolnym
styku nie może być większe niż +25V i mniejsze niż -25V. Należy zaznaczyć przy tym, że zwarcie dwóch styków
RS-232 teoretycznie nie powoduje jego uszkodzenia. W praktyce ten zapis w specyfikacji nie zawsze jest
przestrzegany.
Linie danych, linie sterujące, logika dodatnia i ujemna (wyjaśnić)
5
4.
Ocena niepewności wyniku pomiaru
Błąd względny, bezwzględny i graniczny wynik pomiaru
W metrologii błędem bezwzględnym nazywa się różnicę pomiędzy wartością zmierzoną x, a wartością dokładną
Błąd względny w metrologii i statystyce to iloraz błędu bezwzględnego i wartości dokładnej x0
gdzie
x – wartość mierzona,
Δx – błąd bezwzględny.
Błąd względny jest bezwymiarowy, najczęściej wyrażany w procentach
Błąd graniczny = błąd względny
Estymacja punktowa i przedziałowa
Estymacja punktowa:
Estymacja przedziałowa:
Niepewność standardowa, łączna całkowita
Niepewność standardowa:
a)
b)
Niepewność łączna:
Niepewność całkowita:
5.
Pomiary oscyloskopowe
Budowa i działanie oscyloskopu analogowego, pomiar napięcia
Oscyloskopem nazywa się urządzenie służące do obserwacji i pomiarów przebiegów oraz wzajemnych
zależności między parami wielkości fizycznych.
Wszystkie oscyloskopy można podzielić na kilka grup: cyfrowe, analogowe, próbkujące, z tzw. lampą
pamiętającą. Głównym elementem budowy oscyloskopu jest lampa oscyloskopowa. Ma ona postać szklanego
naczynia, z którego całkowicie zostało odpompowane powietrze. W skład lampy wchodzą: działo elektronowe,
płytki odchylające, ekran. Celem pracy działa elektronowego jest wytworzenie skolimowanej wiązki
elektronów. Są one emitowane przez rozżarzoną katodę. Katoda otoczona jest w lampie przez cylinder z
metalu, z użyciem którego dzięki zmianie napięcia można regulować natężenie wiązki elektronów. W dalszej
kolejności wiązka elektronów jest przyspieszana i skupiana na ekranie przez układ anod. Katoda, cylinder i
anody to składowe działa elektronowego. Po wyjściu wiązki z obszaru działa elektronowego, można nią
dowolnie sterować. Robi się to najczęściej za pomocą pól elektrycznych. Pola te wytwarzane są w lampie przez
dwa kondensatory płaskie. Te elementy nazywa się płytkami odchylającymi. Możliwe jest również sterowanie
za pomocą pól magnetycznych. Taka sytuacja ma miejsce w lampach kineskopowych. Po przejściu przez obszar
płytek wiązka elektronów dostaje się najpierw do dalszej części lampy o stożkowatym kształcie a w
47
,
3
1
1
∑
=
=
=
n
i
i
X
n
X
254
,
0
)
(
1
1
1
2
=
−
−
=
∑
=
n
i
i
X
X
n
S
α
µ
=
⋅
+
≤
≤
⋅
−
)
(
,
,
n
S
t
X
n
S
t
X
P
k
q
k
q
V
X
X
n
n
S
U
n
i
i
X
A
0678
,
0
)
(
)
1
(
1
2
1
=
⋅
⋅
−
=
=
∑
=
V
g
U
V
U
B
kl
g
00577
.
0
3
01
,
0
3
01
,
0
10
001
,
0
max
=
=
∆
=
=
⋅
=
⋅
=
∆
δ
35
,
0
2
2
=
+
=
B
A
L
U
U
U
63
,
0
810
,
1
)
(
687
,
0
)
(
=
≈
=
⋅
=
C
B
A
L
c
U
w
U
U
U
w
U
α
α
6
konsekwencji pada na ekran. Ekran pokrywa się warstewką substancji fluoryzującej lub fosforyzującej.
Oscyloskop opisywany jest przez: częstotliwość pracy, tzw. czułość napięciową, podstawę czasu. Jeśli celem
pracy z oscylatorem jest zbadanie zależności między dwiema wielkościami fizycznym to należy przyłożyć je do
właściwych płytek odchylających. Oscyloskop jest doskonałym narzędziem do badania prądów zmiennych.
Prądy te cechuje zmienność w czasie zarówno napięcia jak i natężenia. Zmiana dotyczy zarówno wartości jak i
kierunku. Najczęściej spotykane prądy zmienne można opisać za pomocą funkcji sinus. I tak napięcie U
przyjmuje postać:
, a natężenie I równa się:
. Wielkości U oraz I to chwilowe
wartości napięcia i natężenia prądu zmiennego. Natomiast występujące we wzorach U
0
oraz I
0
to szczytowe
maksymalne wartości, jakie mogą osiągać te wielkości. Należy wprowadzić jeszcze dwa pojęcia: napięcia i
natężenia skutecznego.
Natężenie skuteczne I
s
oznacza takie natężenie prądu, którego praca była by taka sama jak praca prądu
zmiennego. Można to wyrazić wzorem:
Podobna zależność istnieje dla napięcia:
W celu zbadania napięcia np. prądu sieciowego najpierw do okładek należy dołączyć źródło prądu stałego,
którego napięcie jest znane. Na ekranie oscyloskopu można wtedy obserwować odchylanie się plamki od
położenia równowagi. Należy dokonać pomiaru tego odchylenia. Następnym krokiem jest odłączenie prądu
stałego i podpięcie w to miejsce źródła prądu zmiennego czyli prądu z sieci. Na ekranie obserwowana jest
pionowa kreska, która odpowiada zmianom napięcia prądu sieciowego. Połowa długości tej kreski równa się
amplitudzie drgań plamki odpowiadającej napięciu szczytowemu. Następnie z proporcjonalności wychylenia
plamki do przyłożonego napięcia można obliczyć napięcie szczytowe. Aby możliwe było porównani przebiegów
czasowych
napięcia
i
natężenia
prądu
zmiennego
konieczne
jest
zastosowanie
oscyloskopu
dwustrumieniowego. Wtedy na ekranie ukazują się niezależnie dwa przebiegi, z których jeden odpowiada
napięciu a drugi natężeniu prądu zmiennego.
Pomiar okresu i częstotliwości
Czytamy ilość działek i mnożymy ich ilość przez wartość podstawy czasowej. Częstotliwość = 1/okres.
Tryb pracy X-Y
Oscyloskopy dwukanałowe są z reguły wyposażone w możliwość takiej konfiguracji sprzętu, że sygnał jednego
toru pomiarowego odpowiada za sterowanie odchylania plamki w pionie, natomiast sygnał drugiego toru
odpowiada za odchylanie plamki w poziomie. Taki tryb pracy oscyloskopu, w którym nie trzeba wyzwalać
podstawy czasu, nazywa się trybem XY. Tryb ten jest przydatny do pomiaru przesunięcia fazowego, przy
pomocy figur Lissajous, a także do liczenia rezystancji dynamicznej oraz odpowiedniego zobrazowania pewnych
charakterystyk zarówno dynamicznych, jak i statycznych elementów elektronicznych.
6.
Komparatory analogowe
Co to jest komparator analogowy – podstawowe parametry
Komparator to element elektroniczny porównujący napięcia na
swoich dwóch wejściach, i ustalający na swoim wyjściu stan
zależny od wyniku tego porównania. Poniżej najczęściej
stosowane oznaczenie komparatora na schematach ideowych:
Na pierwszy rzut oka widzimy zdecydowane podobieństwo do
oznaczenia wzmacniacza operacyjnego. Nie przez przypadek,
gdyż w praktyce to właśnie wzmacniacz operacyjny często służy
jako komparator. Istnieją specjalizowane układy komparatorów
o parametrach specjalizowanych dla tego typu zastosowano.
Kluczowa dla komparatorów parametry to wejściowe napięcie
niezrównoważenia(różnica parametrów pomiędzy wejście
odwracającym(-) a nieodwracającym(+)), szybkość przełączania i
czasami obciążalność wyjścia. Często specjalizowane układy
7
komparatorów mają wyjścia typu „otwarty kolektor”, a więc nie są podciągane do napięcia zasilania, na wyjściu
znajduje się tylko otwarty kolektor tranzystora który emiterem dołączony jest do nóżki ujemnego napięcia
zasilania układu.
Zasada działania komparatora jest bardzo prosta. Mamy dwa wejścia: (+) i (-), i jedno wyjście. Jeśli na wejście
(+) przyłożymy większe napięcie niż na wejście (-), to komparator się przełączy, czyli wystawi na wyjściu stan
wysoki(dla układu z wyjściem które nie jest „otwartym kolektorem”). Odwrotnie jeśli na wejściu (-) będzie
panowało większe napięcie niż na wejściu (+) to komparator wystawi na wyjściu stan niski. Pozostaje jeszcze
pytanie, co się stanie, jeśli na obu wejściach będzie panowało to samo napięcie? Otóż w praktyce mamy wtedy
do czynienia ze stanem nieustalonym. Wyjście komparatora może być tylko w stanie „0” lub „1”, a w przypadku
równych napięć żaden z tych stanów nie odzwierciedla stanu jego wejść. Praktycznie napięcia nigdy nie będą
równe ze względu na różnice wewnętrzne paramentów układu(napięcie niezrównoważenia) i ich zmiany pod
wpływem zmiany stanu wyjścia. Komparator może wtedy zareagować naprzemiennym wystawianiem stanu „0”
i „1” z bardzo dużą częstotliwością, zależną od czasu przełączania danego układu
Mostek rezystancyjny (wyprowadzić wzór)
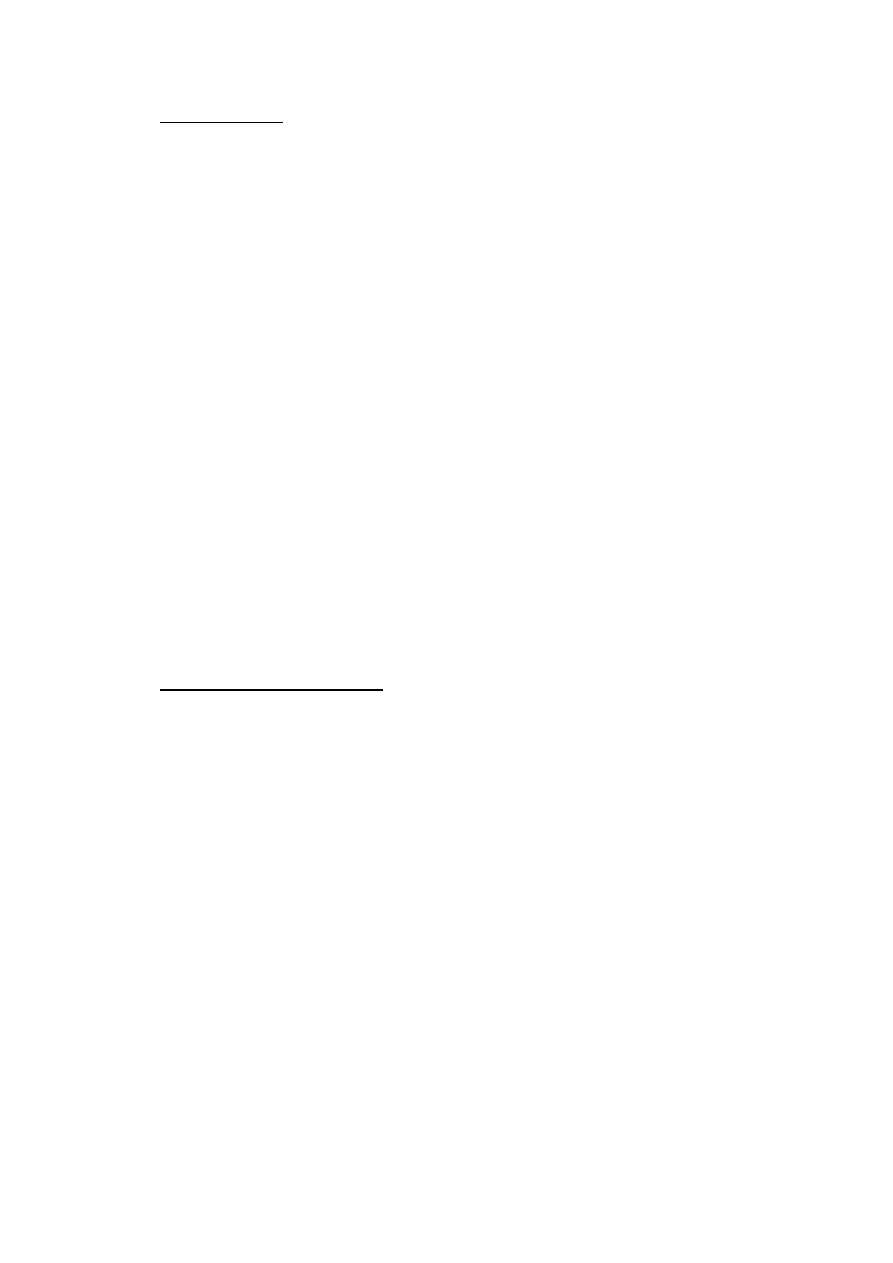
Układ alarmowy z komparatorem i czujnikiem rezystancyjnym
W miejscu R1 włączony
był
fotorezystor.
Zbadaliśmy
działanie
komparatora
dla
różnych wartości Rdeg:
Rdeg
=
50KOhm
–
reakcja na całkowite
zaciemnienie
fotorezystora.
Rdeg
=100KOhm
–
reakcja na całkowite
zaciemnienie
fotorezystora.
Rdeg = 2Kohm – reakcja
na
częściowe
przesłonięcie
ręką
fotorezystora z pewnej
odległości.
Wartości te całkowicie
tłumaczy wartość oporu
fotorezystora
dla
różnych
oświetleń,
które
pomierzyliśmy
wcześniej. Skoro Uref = 2.5V, to wartość przełączająca komparator wynosi również tyle. Napicie takie z
dzielnika zasilanego napięciem 5V uzyskujemy jeśli R1 i Rdeg są sobie równe. Jak zmierzyliśmy, fotorezystor
oświetlony ma opór nieco ponad 1,5KOhm, więc po przesłonięciu ręką możemy oczekiwać zmiany do wartości
dużo większej, a ustawiając wartości Rdeg = 2Kohm przekraczamy ten punkt.
Zbudowaliśmy układ analogiczny jak dla punktu 3, zamiast fotorezystora włączony został termistor.
Wcześniej zmierzyliśmy opór termistora w spoczynku: 46,5KOhm i podgrzanego chuchnięciem: 37,4KOhm.
Widad o wiele mniejszą dynamikę zmian w porównaniu do fotorezystora, i odwrotną ich charakterystykę,
mamy więc niewątpliwie do czynienia z termistorem NTC. Wybraliśmy Rdeg = 41KOhm, obliczone napięcie dla
termistora ogrzanego i chłodnego to odpowiednio: 2,66V i 1,36V, co nie odbiega błędnie od wartości
zmierzonych: 3,02V i 1,41V. Rozrzut wynika z różnego stopnia nagrzania i ochłodzenia podczas pomiarów, i jak
zawsze w takich przypadkach, rozrzutach. Ze względu na odwrotną charakterystykę termistora w porównaniu
do fotorezystora, zmieniliśmy miejscami termistor i opornik dekadowy aby uzyskać tą samą reakcję jak
poprzednio.
8
7.
Oscyloskop cyfrowy
Podstawowe funkcje i porównanie z oscyloskopem analogowym
Oscyloskop jest przyrządem elektronicznym służącym do obserwowania, obrazowania i badania przebiegów
zależności pomiędzy dwiema wielkościami elektrycznymi, bądź innymi wielkościami fizycznymi
reprezentowanymi w postaci elektrycznej. Oscyloskop cyfrowy pobiera poszczególne próbki badanego sygnału,
które równe są wartości chwilowej sygnału w chwili próbkowania, następnie zapamiętuje je w postaci cyfrowej.
Sygnał, który odczytywany jest z pamięci, wyświetlany jest w stabilny sposób na ekranie. Istotne zalety
oscyloskopu cyfrowego to: możliwość zapamiętywania, a następnie przesyłania sygnałów na duże odległości,
możliwość odpowiedniej automatyzacji pomiarowej dla różnorakich parametrów badanego sygnału czy
możliwość prezentacji barwnej wielu różnorakich przebiegów na jednym ekranie wyposażonym w kolorową
lampę oscyloskopową. Dzięki zastosowaniu układów pamięciowych i przetworników analogowo-cyfrowych w
oscyloskopach cyfrowych, lampa oscyloskopowa stała się zbędna i została wyeliminowana przez mniejsze i
bardziej uniwersalne wyświetlacze ciekłokrystaliczne. Oscyloskop, którego my używaliśmy to Tektronix TDS
1002.
Czas narastania, opadania zbocza sygnału prostokątnego (definicja)
Czas narastania RISE TIME – czas, w ciągu którego sygnał wyjściowy układu osiąga (najczęściej) od 10% do 90%
wartości tego sygnału w stanie ustalonym. Jest miarą jakości dynamicznej odpowiedzi skokowej otwartego lub
zamkniętego układu automatyki. Czas opadania – FALL TIME (czas, w czasie którego sygnał elektryczny
przechodzi od 90 % swojego poziomu do 10 %).
Na czym polega kompensacja sondy pasywnej
Podłączając odpowiednio sondę i używając kondensatora nastawnego znajdującego się we wtyczce sondy
kompensujemy sondę. Polega to na dobraniu odpowiedniego kształtu sygnału widocznego na oscyloskopie.
Prawidłowo skompensowana sonda oscyloskopowa powinna zapewniać otrzymywanie dokładnych przebiegów.
Po podłączeniu sondy pomiarowej do wej. oscyloskopu uzyskamy idealny przebieg prostokątny. Najczęściej
regulacji sondy oscyloskopowej dokonuje się trymerem korekcyjnym.
Prawidłowo skompensowana sonda
pomiarowa powinna zapewnić stały współczynnik podziału niezależnie od częstotliwości. Prawidłowo
zestrojona i skompensowana sonda pozwoli uzyskać odpowiednią czułość urządzenia oraz prawidłową
dyskryminację.
8.
Pomiar impedancji wejścia i wyjścia
Co to jest wzmacniacz operacyjny – podstawowe parametry, układ wzmacniacza odwracającego i
nieodwracającego.
Impedancja wejściowa i wyjściowa to obok napięcia niezrównoważenia chyba najważniejsze parametry
charakteryzujące wzmacniacz operacyjny. W idealnym układzie, wejściowa jest nieskończenie wielka,
wyjściowa równa zeru. W praktycznych wzmacniaczach wartości impedancji wejściowej wyraża się przeważnie
w setkach megaomów(w najlepszych układach nawet w gigaomach), a wyjściowa w Ohmach lub dziesiętnych
częściach Ohma. Niespodzianką może być to, iż w pewnej konfiguracji wzmacniacza operacyjnego uzyskujemy
wartość impedancji wejściowej o wiele mniejszą niż sugerowałyby to parametry wejściowe wzmacniacza. W
praktyce, przy pracy z małymi częstotliwościami liczy się przede wszystkim impedancja wejściowa, która przy
konfiguracji odwracającej może być wyraźnie mniejsza od katalogowej(w dalszej części sprawozdania pokażemy
dlaczego), gdyż może nieoczekiwanie wpłynąć na parametry obwodu, np. zmienić charakterystykę
częstotliwościową. Przeważnie nie obciążamy wzmacniaczy bardzo małą impedancją, z wyjątkiem wzmacniaczy
zwanych „driverami”, ale te mają specjalizowaną do tego konstrukcję wyjścia, więc parametr ten gra mniejszą
rolę. Jeśli jednak w grę wchodzą wysokie częstotliwości, konieczne może się okazać dopasowanie impedancji w
celu uniknięcia powstania fali stojącej w obwodzie, a więc konieczna jest znajomość impedancji wejściowej i
wyjściowej wzmacniacza operacyjnego. W praktyce rzadko zachodzi taka potrzeba, gdyż przeważnie przy
wysokich częstotliwościach korzystamy z innych rozwiązać układowych.
Wzmacniacz operacyjny to wielostopniowy, wzmacniacz różnicowy prądu stałego, charakteryzujący się bardzo
dużym różnicowym wzmocnieniem napięciowym rzędu stu kilkudziesięciu decybeli i przeznaczony zwykle do
pracy z zewnętrznym obwodem sprzężenia zwrotnego, który decyduje o głównych właściwościach całego
układu. Wzmacniacz operacyjny jest najbardziej rozpowszechnionym analogowym układem elektronicznym,
realizowanym obecnie w postaci monolitycznych układów scalonych. Wielka uniwersalność, przy jednoczesnym
wykorzystaniu istotnych właściwości układów scalonych, daje możliwość stosowania go w rozmaitych układach,
urządzeniach i systemach elektronicznych, zapewniając masową produkcję, niską cenę i bardzo dobre
parametry użytkowe. Wzmacniacz operacyjny posiada dwa wejścia: odwracające (oznaczane symbolem '-',
9
napięcie na tym wejściu U − ) i nieodwracające (oznaczane symbolem '+', napięcie na tym wejściu U + ), oraz
jedno wyjście (napięcie na wyjściu UO); różnica napięć wejściowych nazywa się napięciem różnicowym (Ud = U
+ − U − ).
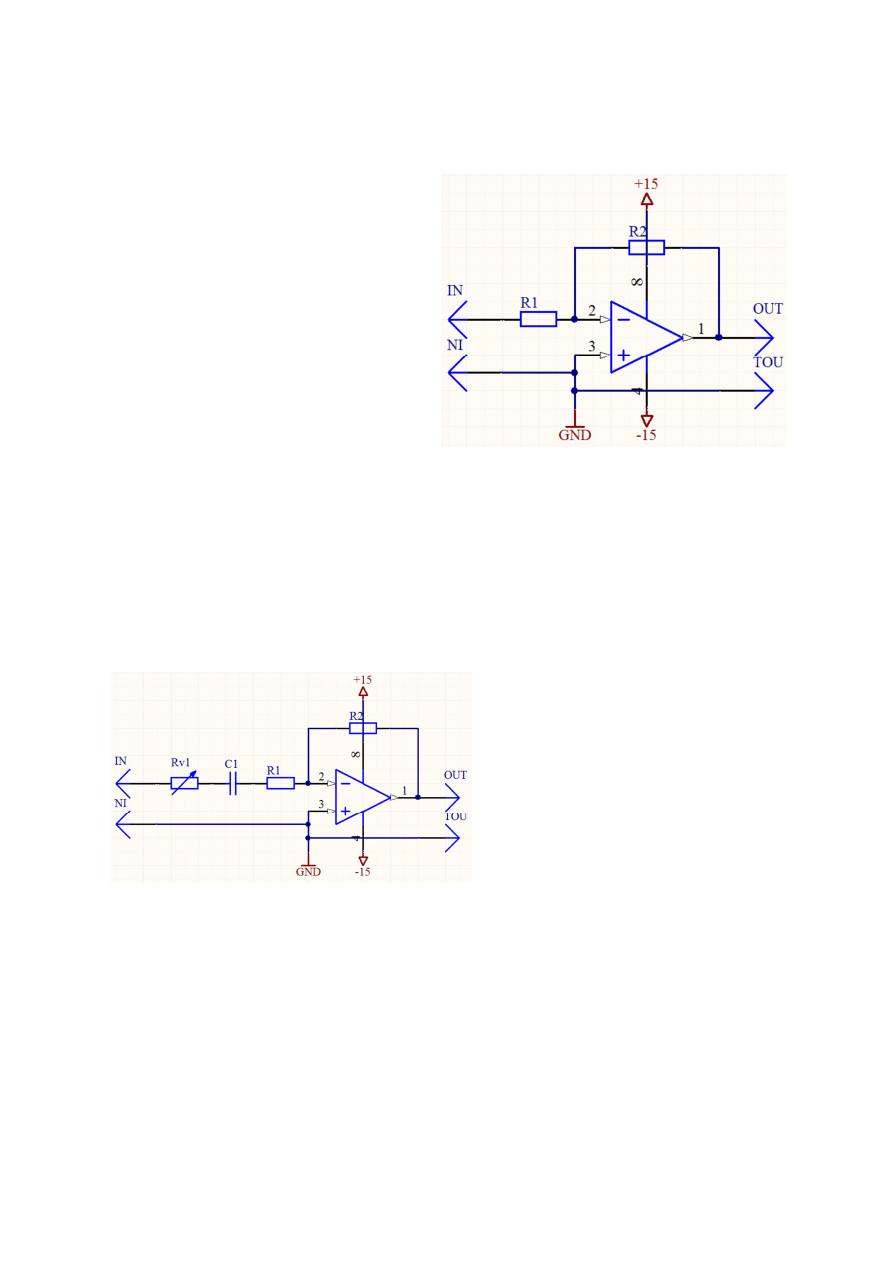
Układ
wzmacniacza
odwracającego.
W
tym
doświadczeni u badaliśmy zachowanie klasycznego
układu odwracającego wzmacniacza operacyjnego.
W tym celu zbudowaliśmy układ jak na rysunku:
Do zacisków IN i NI podłączyliśmy generator
ustawiony na częstotliwość 1Khz i amplitudę ok.
0.05V. Przy wartościach: R1 = 1KOhm, R2 =
10KOhm(opornik dekadowy) wzmocnienie to: ܭݑ=
−ܴ2ܴ1 = 10. Minus w podanych wzorze oznacza
odwrócenie
fazy,
które
obserwujemy
na
oscyloskopie:
Większy sygnał to sygnał wyjściowy, jak widać
faktycznie wzmocnienie jest 10-cio krotne. Zależność
tą sprawdziliśmy również dla napięcia wejściowego
=0,1V.
Pozostaje
nam
jeszcze
wyjaśnić
symetryczność napięcia zasilającego wzmacniacz
operacyjny. Otóż przy takim zasilaniu uzyskujemy bez dodatkowego narzutu układowego symetryczność
względem masy sygnału jaki przetwarza nasz wzmacniacz. Gdyby nie to, zwracając uwagę na to że generator
dostarcza nam przebieg symetryczny względem masy, konieczne byłoby stosowanie układu tzw. sztucznej
masy, inaczej dolna połówka przebiegu byłaby odcięta. Sztuczną masę realizuję się podając w takim przypadku
na wejście odwracające(lub nieodwracające w zależności od wybranego układu) napięcie równe mniej więcej
połowę napięcia zasalania, i blokując kondensatorami na wejściu i wyjściu składową stałą. Często spotykamy
takie konfiguracje np. w układach o zasilaniu bateryjnym i innych gdzie priorytetem jest niski koszt – dodanie
kilku elementów biernych jest tańsze niż dobudowanie ujemnej sekcji zasalania. Trzeba jednak być świadomym
tego, iż układ sztucznej masy wprowadza pewne ograniczenia, którymi nie będziemy się tu zajmowali.
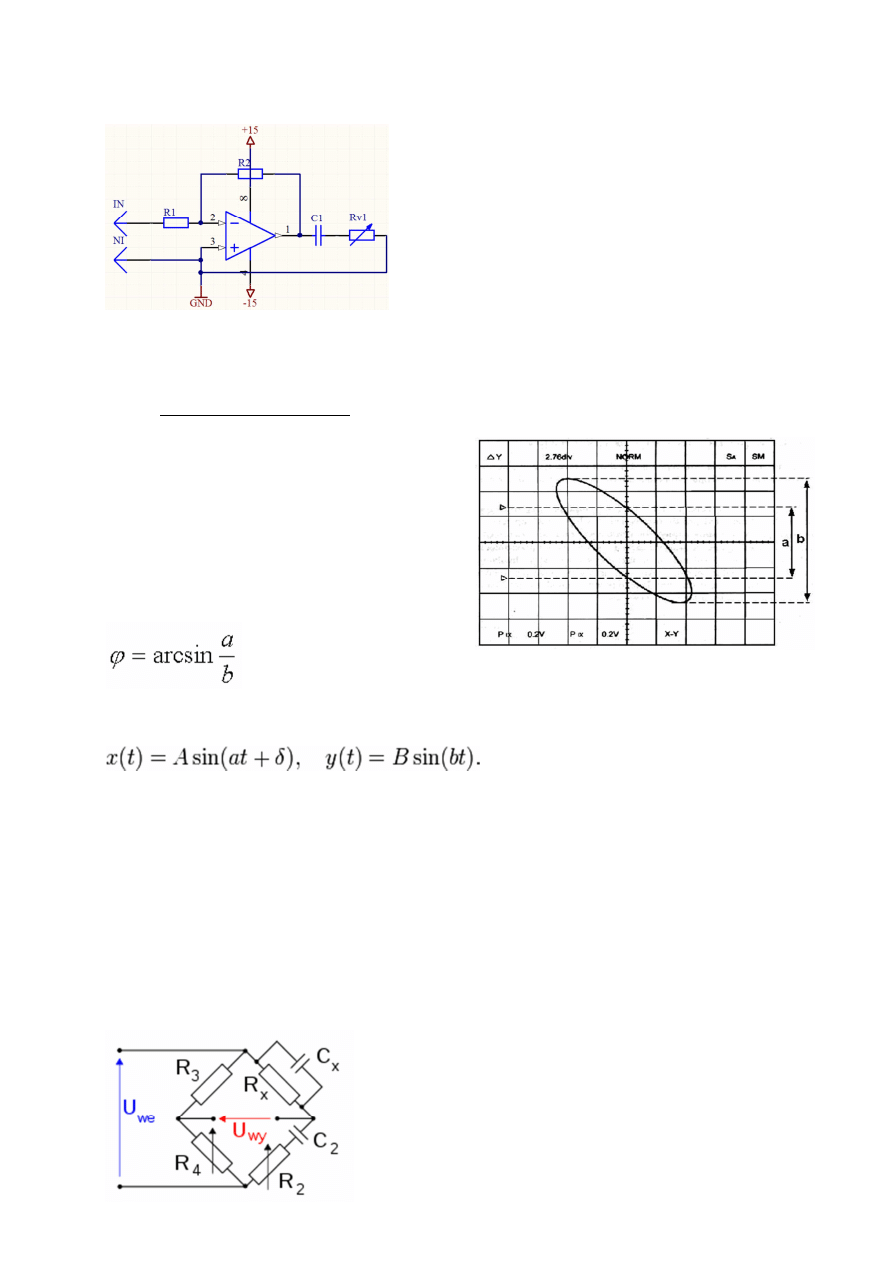
Pomiar impedancji wejścia i wyjścia
Pomiar impedancji wejściowej wzmacniacza
W
celu
realizacji
tego
doświadczenia
wykonaliśmy następujący układ:
Opory R1 i R2 pozostały bez zmian w stosunku
do poprzednich pomiarów, doszedł natomiast C1
mający blokować ewentualną składową stałą, i
opornik
regulowany
Rv1.
Na
wejście
doprowadziliśmy sinusoidalny przebieg 1Khz o
amplitudzie 1V. Regulując nastawami Rv1
obserwowaliśmy sygnał tak, aby doprowadzić do
zmniejszenia
jego
amplitudy
o
połowę.
Uzyskaliśmy to przy oporze Rv1 = 1Kohm, co
przyjmujemy jako impedancje wejściową wzmacniacza wejściowego. Przy takim dopasowaniu – Rwe = Rv1
uzyskujemy
dzielnik
napięcia
który
dzieli
napięcie
wejściowe
równo
na
pół:
ܷݓݕ=ܷݓ݁
*(ܴݓ݁/ܴݓ݁+ܴݒ1)=ܷݓ݁1/2. Należy tu sobie postawić pytanie: skąd tak niska wartość impedancji
wejściowej? Pisaliśmy przecież, iż wzmacniacz operacyjny charakteryzuje się bardzo dużą wartością impedancji
wejściowej. Otóż okazuje się, że źródłem tak niskiej wartości jest tu konfiguracja układu. Policzmy: Patrząc od
strony wejścia odwracającego, płynie tam jakiś prąd i istnieje tam jakieś napięcie. Tak więc: ܴݓ݁=ܷ/ܫ,
ܷ=ܫ
∗ܴ1,ܴݓ݁=ܫܴ1/ܫ=ܴ1. Wszystko jasne – w takiej konfiguracji to opór R1 determinuje impedancję wejściową
układu, a nie impedancja wejściowa samego wzmacniacza operacyjnego. Aby się empirycznie upewnić,
sprawdziliśmy zachowanie dla f = 10KHz. Obserwacja była taka sama jak dla f = 1KHz. ależy tu zadać kolejne
pytanie – po co stosować układ który ma o wiele niższa impedancję wejściową. Tutaj należy zwrócić uwagę na
pewien szczegół – mniejszą, ale dokładnie znaną. Umożliwia to dopasowanie impedancyjne wejścia, co jest
istotnie przy wysokich częstotliwościach, a także zapanowanie nad charakterystykami wejściowymi w
przypadku obwodów o charakterze nieliniowym . Pozorna wada okazuje się wtedy dużą zaletą.
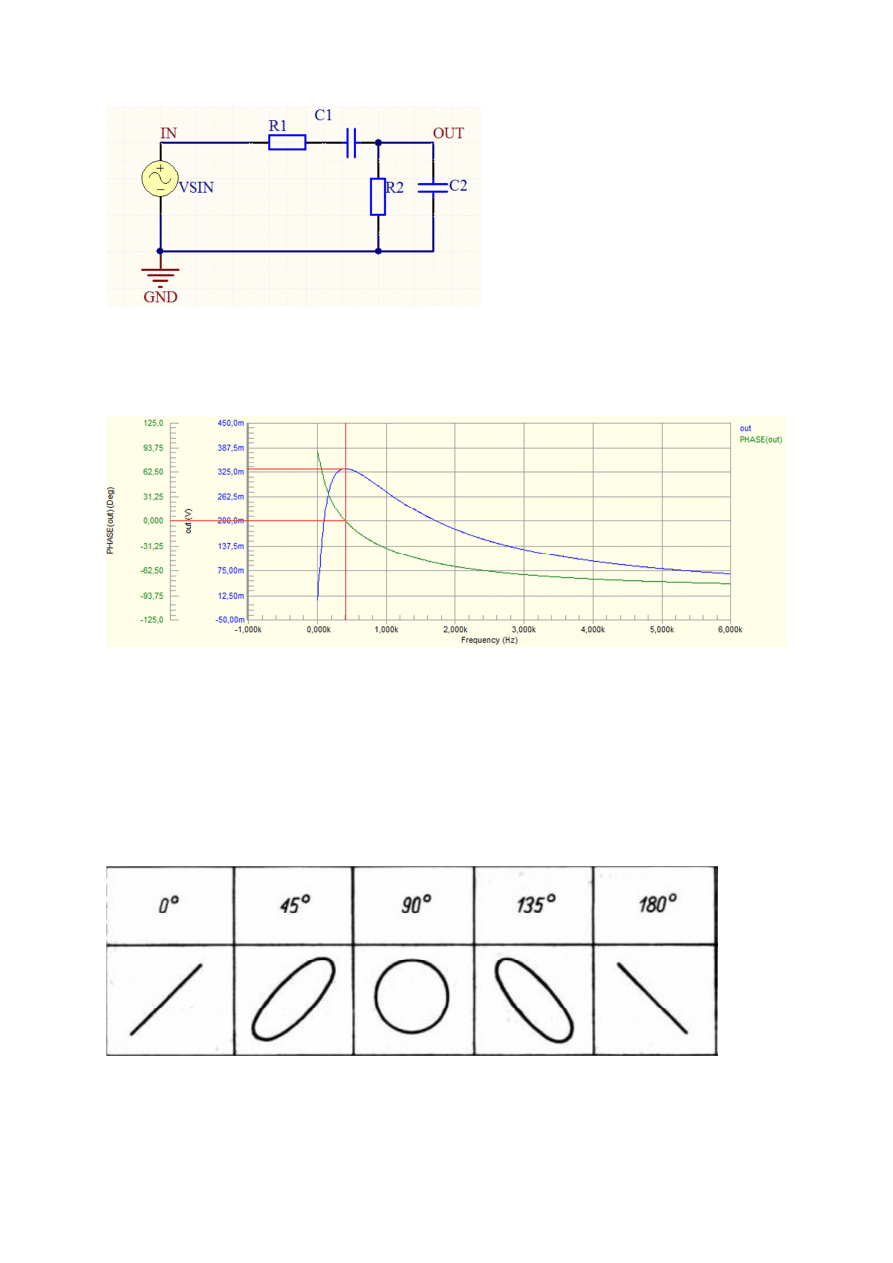
Pomiar impedancji wyjściowej wzmacniacza
10
Aby zrealizować to ćwiczenie podłączyliśmy układ jak na rysunku poniżej:
Wartości R1 i R2 pozostały niezmienione w porównaniu do
poprzednich pomiarów. W tym przypadku stosujemy dzielnik
napięcia na wyjściu, analogicznie jak w poprzednim punkcie,
szukamy wartości Rv1 dla której sygnał zmniejszy swoją
amplitudę o połowę. Ze względu na spodziewaną niską
wartość Rv1 i co za tym idzie stosunkowo duży prąd jaki
popłynie na wyjściu ograniczamy napięcie z generatora do
20mV. Dla f = 1KHz obserwujemy oscyloskop i widzimy
zmniejszenie amplitudy przy Rv1 = 2Ohm. Taka sama
obserwacja następuje przy f = 10KHz, a więc tą wartość
przyjmujemy za impedancję wyjściową wzmacniacza.
Wyprowadzić wzór na moc wydzielaną na obciążeniu Robc dołączonym do źródła napięcia o U o rezystancji
wewnętrznej Rwe. Kiedy na obciążeniu wydzielana jest maksymalna moc
9.
Pomiar przesunięcia fazowego
Metody pomiaru przesunięcia fazowego
Przebiegi pomiędzy którymi należy mierzyć przesunięcie
fazowe podaje się na wejścia X i Y oscyloskopu. Kształt
otrzymanej na ekranie figury będzie zależał od wartości
kąta fazowego j. Gdy przesunięcie fazowe wyniesie 0 lub
180°, wówczas oscyloskop narysuje prostą przechodzącą
przez I i III ćwiartkę układu współrzędnych lub
odpowiednio II i IV ćwiartkę. Przy kącie fazowym równym
90° na ekranie powstanie elipsa symetryczna względem
osi układu współrzędnych. Do pośrednich wartości
przesunięcia fazowego oscyloskop narysuje elipsę o
wymiarach zależnych od wartości
kąta
fazowego
j.
Należy
wyskalować otrzymaną figurę i obliczyć wartość kąta przesunięcia fazowego z
zależności.
Krzywe Lissajouse – jak powstaje obraz na oscyloskopie
Krzywa Lissajous – w matematyce krzywa parametryczna opisująca drgania harmoniczne, dana wzorem:
Nazwy pochodzą od nazwisk Nathaniela Bowditcha, który opisał rodzinę tych krzywych w 1899, oraz Jules'a
Antoine'a Lissajous, który badał je używając do tego drgających kamertonów z umocowanymi do nich
zwierciadełkami. Jedną z metod uzyskiwania krzywych Lissajous jest podanie na wejścia oscyloskopu,
pracującego w trybie XY, dwóch sygnałów sinusoidalnych o częstotliwościach pozostających w stosunku a/b .
Ciekawy efekt uzyskuje się również, gdy stosunek tych częstotliwości jest minimalnie różny od ilorazu dwóch
niskich liczb naturalnych: dzięki płynnej zmianie fazy (parametru δ) uzyskuje się iluzję trójwymiarowego obrotu
krzywej. W najprostszym przypadku, gdy a~b uzyskuje się efekt „obracającej monety”. Krzywe Lissajous
powstają gdy ciało porusza się w płaszczyźnie xy, w taki sposób, że ruch zarówno wzdłuż kierunku x, jaki i
kierunku y jest ruchem harmonicznym. Wykresem zmian współrzędnej x jest jakaś sinusoida, podobnie
wykresem zmian współrzędnej y jest też jakaś sinusoida, ale o innych parametrach. Do określenia jednej
sinusoidy potrzeba 3 parametrów: amplitudy, okresu oraz fazy początkowej. Jeżeli mamy dwie sinusoidy to
należy podać aż 6 parametrów, po 3 dla każdej sinusoidy.
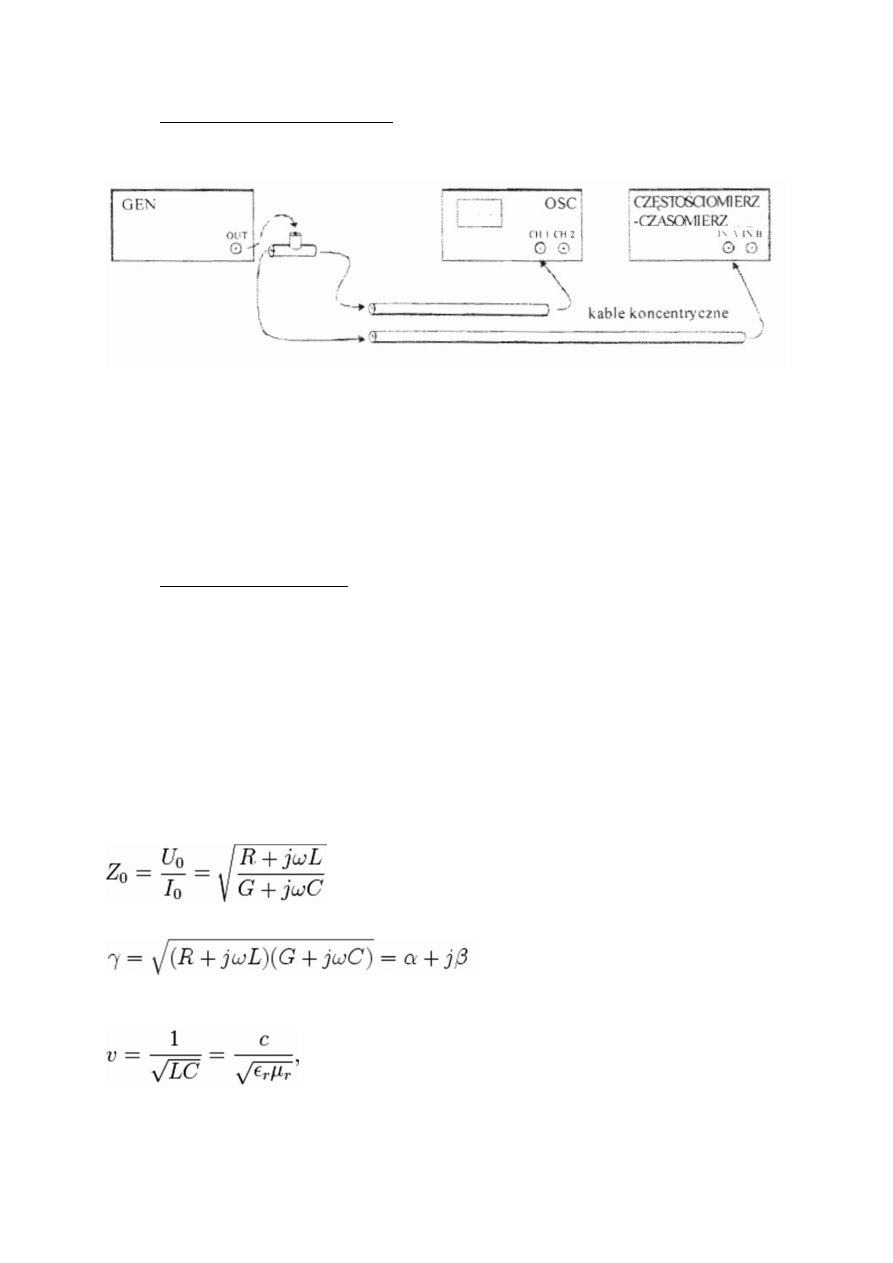
Mostek Wiena – wykres przesunięcia fazowego i tłumienia
Mostek Wiena, z którym to zapoznanie się było celem tego
ćwiczenia to obwód elektroniczny zbudowany z elementów R i C. W
ujęciu z jakim mieliśmy do czynienia w naszych pomiarach składał on
się z dwóch sekcji, w jednej z nich elementy R i C były połączone
równolegle, w drugiej szeregowo, co pokazuje schemat poniżej:
11
Aby nie wgłębiać się niepotrzebnie do opisu czysto teoretycznego, a skupić się na istocie działania mostka, i
jego praktycznych zastosować, posłużymy się tutaj symulacją komputerową tego obwodu, w zakresie
przenoszenia częstotliwości od 0 do 6KHz. Wybór pasma podyktowany jest wartościami elementów jakie
dostaliśmy do naszym pomiarów: kondensator – 10nF, oporniki – 39KOhm. Symulacja fazy i amplitudy sygnału
na wyjściu(zakładając wejściową fazę – 0 stopni, i amplitudę – 1V w całym zakresie symulacji) wygląda
następująco:
Na wykresie zaznaczyliśmy czerwonymi liniami charakterystyczne punkty, które cechują mostek Wiena. Otóż
jak widać, maksymalną amplitudę uzyskaliśmy przy częstotliwości ok. 400Hz, i również w tym punkcie
przesunięcie fazowe wynosiło 0 stopni. Przesunięcie fazy zawiera się pomiędzy +90 i -90 stopni, a amplituda
zarówno na prawo i jak na lewo od podanej częstotliwości szybko maleje. Zauważmy również, iż w punkcje
„rezonansu” amplituda jest równa w przybliżeniu 1/3 amplitudy wejściowej, co wynika wprost z obliczeń
działania mostka znanych z teorii obwodów, w które tutaj nie będziemy wnikali. Takie właściwości sugerują
nam zastosowanie mostka Wiena w dwóch dziedzinach: konstruowania filtrów, i przesuwników fazy, a to
drugie otwiera nam drogę do budowy generatora przebiegu sinusoidalnego. W tym ćwiczeniu zapoznaliśmy się
również z wyzwalaniem oscyloskopu w trybie X-Y, a więc i kanał odchylania poziomego i pionowego był
wysterowany z zewnętrznych sygnałów. Jednym z zastosowań takiego trybu jest pomiar przesunięć fazowych
korzystając z tzw. figur Lissajous. Jeśli częstotliwości na obu wejściach są takie same, a występuje jedynie
różnica faz, uzyskujemy obrazy jak poniżej:
12
10.
Cyfrowy pomiar czasu i częstotliwości
Pomiar częstotliwości i okresu sygnału okresowego
Układ do cyfrowego pomiaru częstotliwości (schemat blokowy)
Błąd dyskretyzacji
Błąd dyskretyzacji — wynikający ze skończonej liczby próbek N przypadającej na okres sygnału. Mniej więcej
oznacza to, że jeśli przebieg który badamy zmieni się w momencie między próbkami to informacja o tej zmianie
jest utracona. Błąd dyskretyzacji występuje w miernikach cyfrowych (jest składnikiem błędu pomiarowego). Aby
go zminimalizować należy ustawić zakres pomiaru na jak najmniejszy np. jak mierzymy napięcie w granicach 6V
i mamy zakresy 10V, 100V i 1000V no to ustawiamy 10V a nie 1000V. Błąd dyskretyzacji pojawia się przy
przybliżaniu wielkości ciągłej wielkością dyskretną i wynika ze skończonej rozdzielczości metody pomiarowej,
np. usiłujesz przybliżyć (lub zmierzyć) 1.25 sekundy wielokrotnością odcinka 0.1s, co może dać ci w wyniku 12
lub 13 [odcinków bazowych]. Czyli prościej rzecz biorąc za mała rozdzielczość by wyłapać różnicę między 1.20 a
1.25s lub 1.25 a 1.30 (zależy od sposobu dyskretyzacji).
11.
Pomiary zjawisk w linii długiej
Co to jest linia długa – charakterystyczne zjawiska
Linia długa – w energetyce, telekomunikacji i elektronice określenie linii transmisyjnej przenoszącej sygnały,
stosowane przede wszystkim w teorii obwodów i technice mikrofal. Linią długą jest każde urządzenie
(pierwotnie linie przewodowe), w którym wymiar długości, porównywalny jest z długością fali przebiegu
elektrycznego rozchodzącego się w urządzeniu. Przykładem linii długich są m.in. kable koncentryczne, czy linia
elektroenergetyczna napowietrzna wysokiego napięcia o znacznej długości (954 km). W technice mikrofal
definiuje się linię długą jako nieskończenie długą linię transmisyjną będącą idealnym odbiornikiem energii. W
praktyce jest to linia transmisyjna o skończonej długości zakończona impedancją dopasowaną.
Linia długa jest charakteryzowana przez następujące parametry:
R - rezystancja jednostkowa linii [Ω/m]
L - indukcyjność jednostkowa linii [H/m]
G - konduktancja jednostkowa linii [S/m]
C - pojemność jednostkowa linii [F/m]
Impedancja falowa linii:
Stała propagacji:
Część rzeczywista α to tzw. stała tłumienia wyr. w [Np/m], podawana też w dB/m zaś część urojona
β=2π/λ=ω/v to stała fazowa wyr. w [rad/m]. ω jest pulsacją Dla linii bezstratnych R=0, G=0, α=0. Prędkość
fazowa fali w linii bezstratnej wynosi:
i jest zawsze mniejsza od prędkości światła w próżni c. Przykłady linii transmisyjnych (linie ciągłe są liniami sił
pola elektrycznego E, zaś przerywane magnetycznego H, εr - względna przenikalność elektryczna i μr - względna
przenikalność magnetyczna ośrodka o charakterze dielektryka lub magnetyka, który w linii pełni rolę izolatora).

13
Do najpopularniejszych należy linia koncentryczna. Ma ona tę zaletę, że linie pól elektrycznego i
magnetycznego zamykają się wewnątrz linii.
Pomiar impedancji linii, pomiar tłumienia
Tłumienie: √(U1/U2) – U1 i U2 są to napięcia, które odczytujemy z oscyloskopu.
Impedancję linii mierzymy za pomocą opornika dekadowego i oscyloskopu. Zmieniamy opór do uzyskania
odpowiednich wartości sygnału w jednej linii.
Co to jest dopasowanie impedancyjne
Z racji tego, że większość linii transmisyjnych można uznać z dobrym przybliżeniem za bezstratne, powyższa
zależność ma kardynalne znaczenie przy obliczaniu parametrów wielu obwodów mikrofalowych działających w
oparciu o teorię linii transmisyjnych. Jak widać impedancja linii zmienia się wraz z odległością od obciążenia
stąd mówi się (w sensie impedancyjnym) o transformacyjnych własnościach linii. Trywialnym przypadkiem, jest
obciążenie linii impedancją ZK = Z0 (przypadek idealnego dopasowania), dla którego w linii nic się nie zmienia i
impedancja wejściowa na całej jej długości wynosi Z0. Można więc powiedzieć, że impedancja
charakterystyczna linii to taka impedancja, że po obciążeniu nią linii prąd, napięcie, a co za tym idzie także
impedancja wejściowa, utrzymują się wzdłuż linii na stałym poziomie. Stan dopasowania linii do obciążenia
oznacza, że energia fali elektromagnetycznej propagującej się w linii w całości przedostaje się do obciążenia. W
każdym innym przypadku mówi się o niedopasowaniu.
12.
Przetwornik analogowo cyfrowy
Charakterystyka przetwornika a/c, kwantowanie, błąd offsetu, błąd wzmocnienia
Przetwornik analogowo-cyfrowy A/C (ang. A/D – analog to digital; ADC – analog to digital converter), to układ
służący do zamiany sygnału analogowego (ciągłego) na reprezentację cyfrową (sygnał cyfrowy). Dzięki temu
możliwe jest przetwarzanie ich w urządzeniach elektronicznych opartych o architekturę zero-jedynkową oraz
gromadzenie na dostosowanych do tej architektury nośnikach danych. Proces ten polega na uproszczeniu
sygnału analogowego do postaci skwantowanej (dyskretnej), czyli zastąpieniu wartości zmieniających się
płynnie do wartości zmieniających się skokowo w odpowiedniej skali (dokładności) odwzorowania.
Przetwarzanie A/C tworzą 3 etapy: próbkowanie, kwantyzacja (dyskretyzacja) i kodowanie. Działanie przeciwne
do wyżej wymienionego wykonuje przetwornik cyfrowo-analogowy C/A. W zastosowaniach metrologii
zdecydowanie największą rolę odgrywa przetwornik A/C z tzw. podwójnym całkowaniem. Zastanówmy się
najpierw, po co w ogóle przechodzenie na cyfrową dziedzinę, i dlaczego jest to obecnie tak popularne. Stosując
dokładne przetworniki A/C, a takim jest bez wątpliwie omawiany tu przetwornik z podwójnym całkowaniem,
uzyskujemy większą dokładność odczytu(łatwiej jest odczytać cyfry z wyświetlacza, niż pozycję wskazówki na
skali) i otwiera się przed nami bardzo szeroka droga komputerowej rejestracji i obróbki zarejestrowanych
pomiarów. Istnieje wiele metod przetwarzania analogowego sygnału pomiarowego na dyskretny. Jedne z nich
cechują się szybkością(pracują w czasie rzeczywistym) i znajdują zastosowanie np. w oscyloskopach cyfrowych i
przetwarzaniu obrazu a także dźwięku. Inne za to charakteryzuje wysoka dokładność, ale też mniejsza szybkość
przetwarzania. Przetwornik z jakim mieliśmy do czynienia należy zdecydowanie do tej drugiej grupy. Co więcej,
jak wykażemy później, czas pomiaru zależy do wielkości mierzonego parametru. Jest to także przetwornik
należący do grupy układów działających na zasadzie metody kompensacyjnej, a więc nie działa w czasie
rzeczywistym. Kluczowym elementem przetwornika jest układ całkujący(integrator), realizowany praktycznie za
pomocą wzmacniacza operacyjnego z włączonym kondensatorem pomiędzy wyjściem a wejściem
nieodwracającym. Za nim jest komparator, który wykrywa przejście przez zero(potrzebne do drugiego
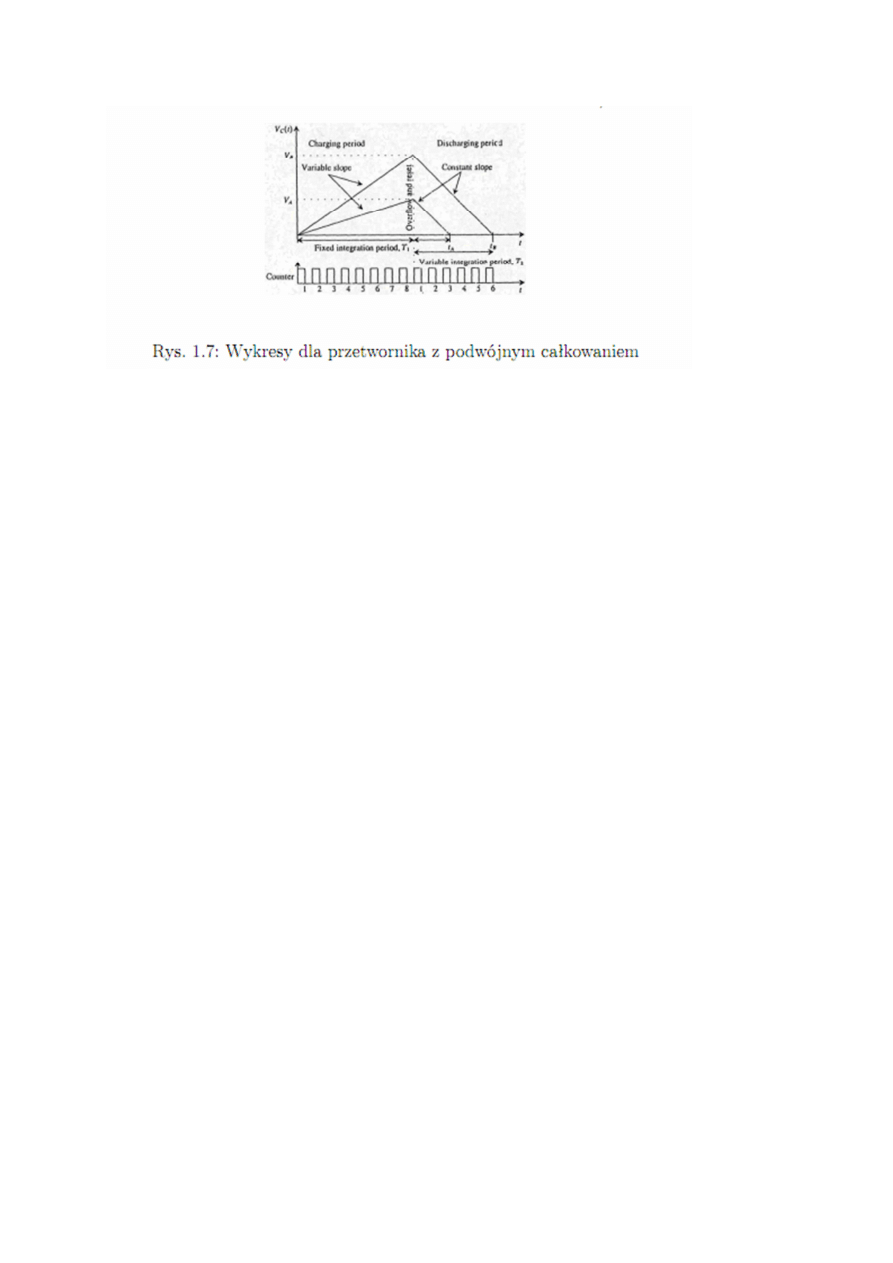
całkowania). Pierwszym etapem, jest całkowanie mierzonego napięcia przez czas równy wielokrotności 20ms.
Wybór czasu nie jest tutaj przypadkowy, gdyż jest to okres napięcia sieci energetycznej w Polsce, przez co w
prosty sposób uniezależniamy się od zakłóceń które mogłoby ono wywołać. Następnie, po przepełnieniu
licznika następuje przełączenie wejścia integratora z mierzonego napięcia, na napięcie referencyjne o
przeciwnej biegunowości. Tym razem zatrzymanie licznika determinowane jest przez komparator(detektor
przejścia przez 0) umieszczony na wyjściu integratora. W tym przypadku ilość zliczonych impulsów odpowiada
mierzonemu napięciu. Dzięki dwóm fazom pomiaru, na jego wynik nie mają wpływu parametry integratora i ich
rozrzut, a jedynie stabilność i dokładność napięcia referencyjnego.
Błąd wzmocnienia to nieliniowość charakterystyki przetwarzania układu przetwornika, natomiast offset to
stałe, powtarzające się odchylenie wartości mierzonej od rzeczywistej o pewną wartość. Zwracamy uwagę na
to, iż po odpowiedniej kalibracji napięcia referencyjnego błąd wynikający z nieliniowości przetwornika może
być w bardzo dużym stopniu zredukowany. Błąd kwantyzacji (zwany również szumem kwantyzacji) zniekształca
ciągły sygnał analogowy, zaokrąglając jego wartości do najbliższych, odpowiadających mu wartości dyskretnych,
14
wskutek czego nie można odróżnić dwóch różnych próbek o zbliżonych do siebie wartościach. Zwiększenie
rozdzielczości przetwornika zmniejsza błąd kwantyzacji.
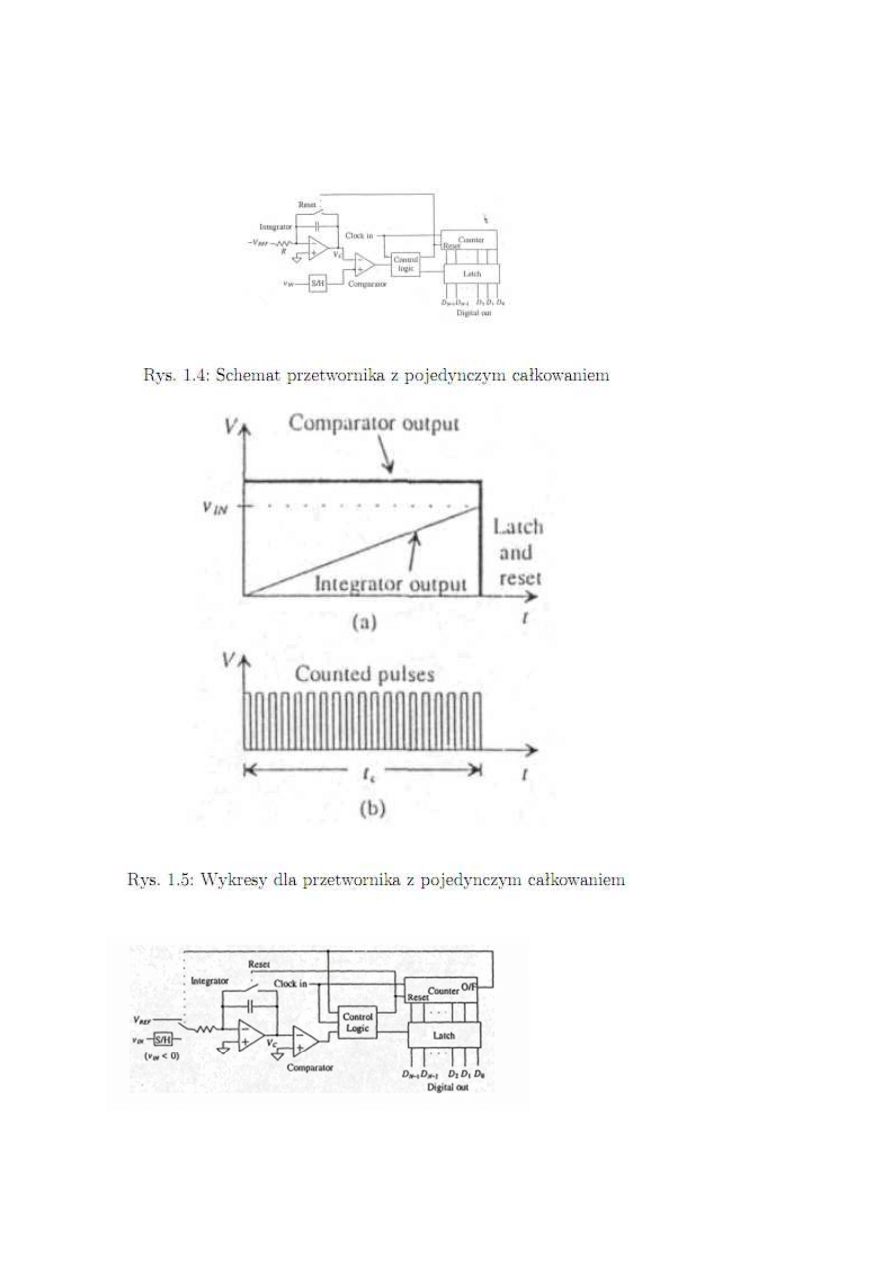
Przetwornik a/c z pojedynczym całkowaniem (schemat blokowy)
Przetwornik a/c z podwójnym całkowaniem (schemat blokowy)
15
Wyszukiwarka
Podobne podstrony:
metro opracowanie
Opracowanie Metro
Opracowanie Metro lepsze ?z grafik
Opracowanka, warunkowanie
OPRACOWANIE FORMALNE ZBIORÓW W BIBLIOTECE (książka,
postepowanie w sprawach chorob zawodowych opracowanie zg znp
metro sciaga id 296943 Nieznany
opracowanie 7T#2
opracowanie testu
Opracowanie FINAL miniaturka id Nieznany
Opracowanie dokumentacji powypadkowej BHP w firmie
przetworniki II opracowane
Opracowanie Programowanie liniowe metoda sympleks
Nasze opracowanie pytań 1 40
haran egzamin opracowane pytania
więcej podobnych podstron