
LABORATORIUM PODSTAW AUTOMATYKI
INSTRUKCJA DO ĆWICZENIA 4
-
DOBÓR NASTAW REGULATORÓW
opr. dr inż Krzysztof Kula
1.Wstęp
Dobór nastaw regulatorów uwzględnia dynamikę obiektu jak i wymagania stawiane zamkniętemu
układowi regulacji .
Projektowanie układów regulacji obejmuje m.in. wybór typu regulatora oraz dobór jego nastaw.
Struktury regulatorów: Najczęściej spotykane struktury regulatorów to struktura szeregowo-
równoległa oraz równoległa bez interakcji czyli z niezależnymi nastawami.
Transmitancje regulatorów:
P
p
K
)
s
(
G
=
(1)
PI
)
s
T
(
K
)
s
(
G
i
p
1
1
+
⋅
=
(2)
PID
)
s
T
s
T
(
K
)
s
(
G
d
i
p
+
+
⋅
=
1
1
(3)
Przy wyznaczaniu nastaw regulatorów liniowych
stosuje się wiele różnych metod .ich doboru.
Generalnie jednak dąży się do uzyskania pewnych oczekiwanych własności dynamicznych całego
układu zamkniętego. Wówczas do ich osiągnięcia konieczna się staje znajomość dynamiki obiektu.
Własności dynamiczne obiektu wyznaczane mogą być bądź w oparciu o charakterystyki
czestotliwościowe , bądź o charakterystyki czasowe. Korzystniejsza jest synteza w oparciu o
charakterystyki częstotliwościowe. Wymaga ona jednak większego doświadczenia. Dlatego na
zajęciach studenci korzystają z metod Zieglera Nicholsa, nomogramów bądź tabel, do których użycia
wystarczy wyznaczenie charakterystyk czasowych obiektu.
Stosowanie regulatora ciągłego jest korzystne w zakresie 0.2<T
o
/T < 1 , gdzie T
o
- zastępcze
opóźnienie, T- zastępcza stała czasowa. Stosunek T
o
/T określa się jako opóźnienie względne. Przy
mniejszych opóźnieniach względnych można bez obawy o znaczne popgorszenie jakości sterowania
stosować regulator dwupołożeniowy, zaś przy większym opóźnieniu względnym sterowanie
impulsowe.
2.Przebieg ćwiczenia
ZADANIE 1.
Badanie charakterystyk podstawowych regulatorów liniowych.
. Wprowadzić do przestrzeni roboczej transmitancję regulatora PID z rzeczywistym członem
różniczkującym o transmitancji
s
T
s
T
)
s
(
G
d
D
⋅
+
⋅
=
1
. Przyjąć K
p,
.(1-5), T
i
(4-8), T
d
(0.5-2) – const oraz
ustalić trzy różne wartości T
. Sporządzić charakterystyki skokowe badanego regulatora
ZADANIE 2.
Dobór nastaw regulatorów według I metody Zieglera-Nicholsa
Wprowadzić do przestrzeni roboczej, podaną przez prowadzącego zajęcia, transmitancję obiektu
regulacji G
ob
(s). Zamodelować pod sisotool zamknięty układ regulacji , ustalając wstępnie: G
ob
(s) ->
G, F=H=C=1 Zwiększając wzmocnienie regulatora proporcjonalnego C= K
P,
doprowadzić zamknięty
układ regulacji do granicy stabilności. Wyznaczyć odpowiadające temu stanowi wzmocnienie
regulatora K
P
=K
kr,
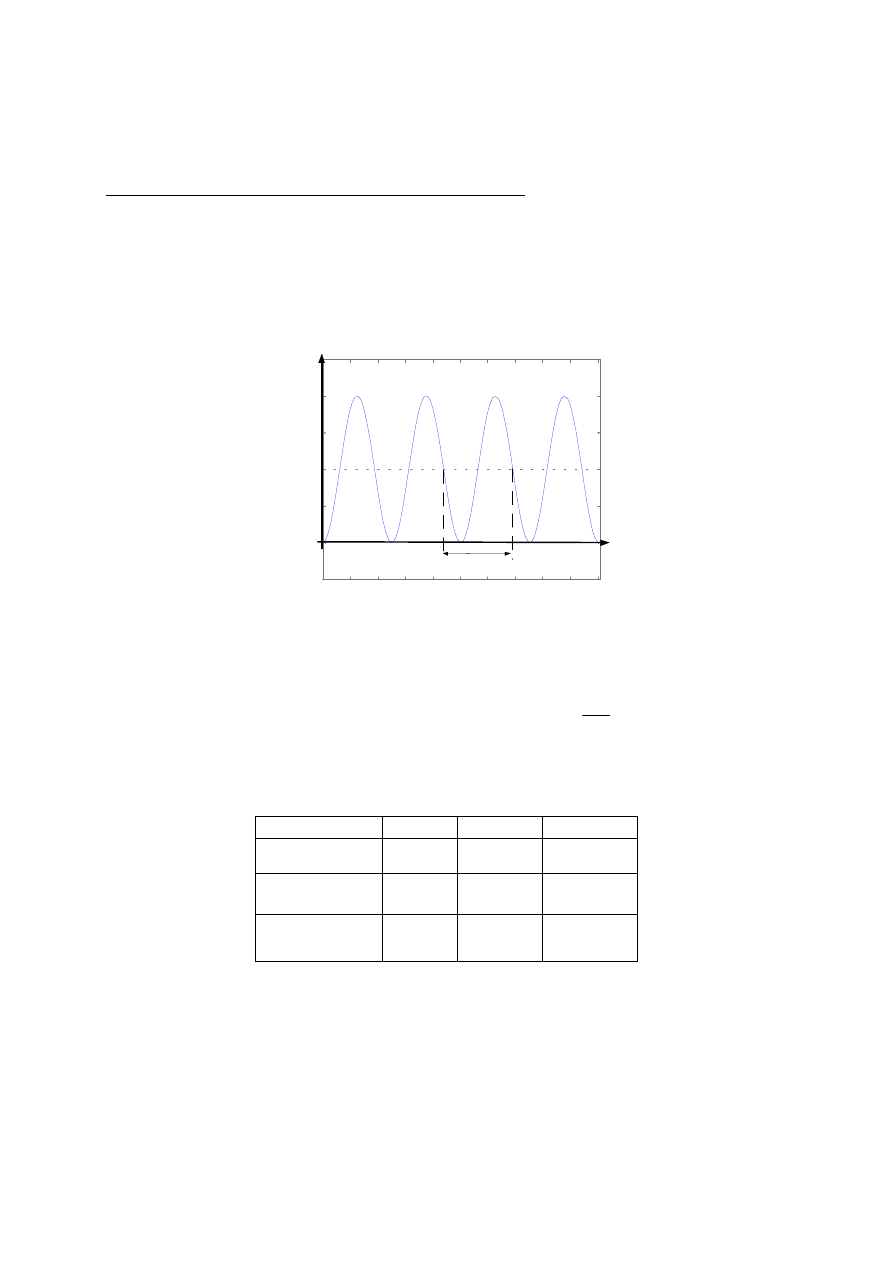
po czym pomierzyć okres generowanych na wyjściu tego układu drgań, T
osc
0
5
10
15
20
25
30
35
40
45
50
-2
0
2
4
6
8
10
w ielkość regulow ana
t
y(
t)
T
osc
Rys. Pomiar okresu oscylacji drgań krytycznych
Sporządzić pod sisotool logarytmiczną charakterystykę modułu układu otwartego / Analysis – Other
Loop Responses – Open Loop- Loop Transfer- Bode / ( regulator P – obiekt). Odczytać z niej
pulsację odcięcia
o
ω
, dla której
0
20
=
⋅
)
(
Lm
o
ω
. Obliczyć stosunek
osc
o
T
ω
.
W oparciu o pomierzone wielkości oraz tabelę 1 wyznaczyć nastawy regulatorów P,PI,PID .
Tab. 1 Dobór nastaw według I Metody Zieglera-Nicholsa
Typ regulatora
K
p,
T
i
T
d
P
0.5 K
kr,
-
-
PI
0.45 K
kr,
0.85T
osc
PID
0.6 K
kr
0.5 T
osc
0.125 T
osc
Przeprowadzić symulację przebiegu wielkości regulowanej przy wystąpieniu:
a) skokowej zmiany wartości zadanej
b) skokowej zmiany zakłócenia
Schemat blokowy do symulacji przypadku b) przedstawia rys. poniżej. Konfigurację tę w sisotool
ustawiamy pod okienkiem import klikając na klawisz FS
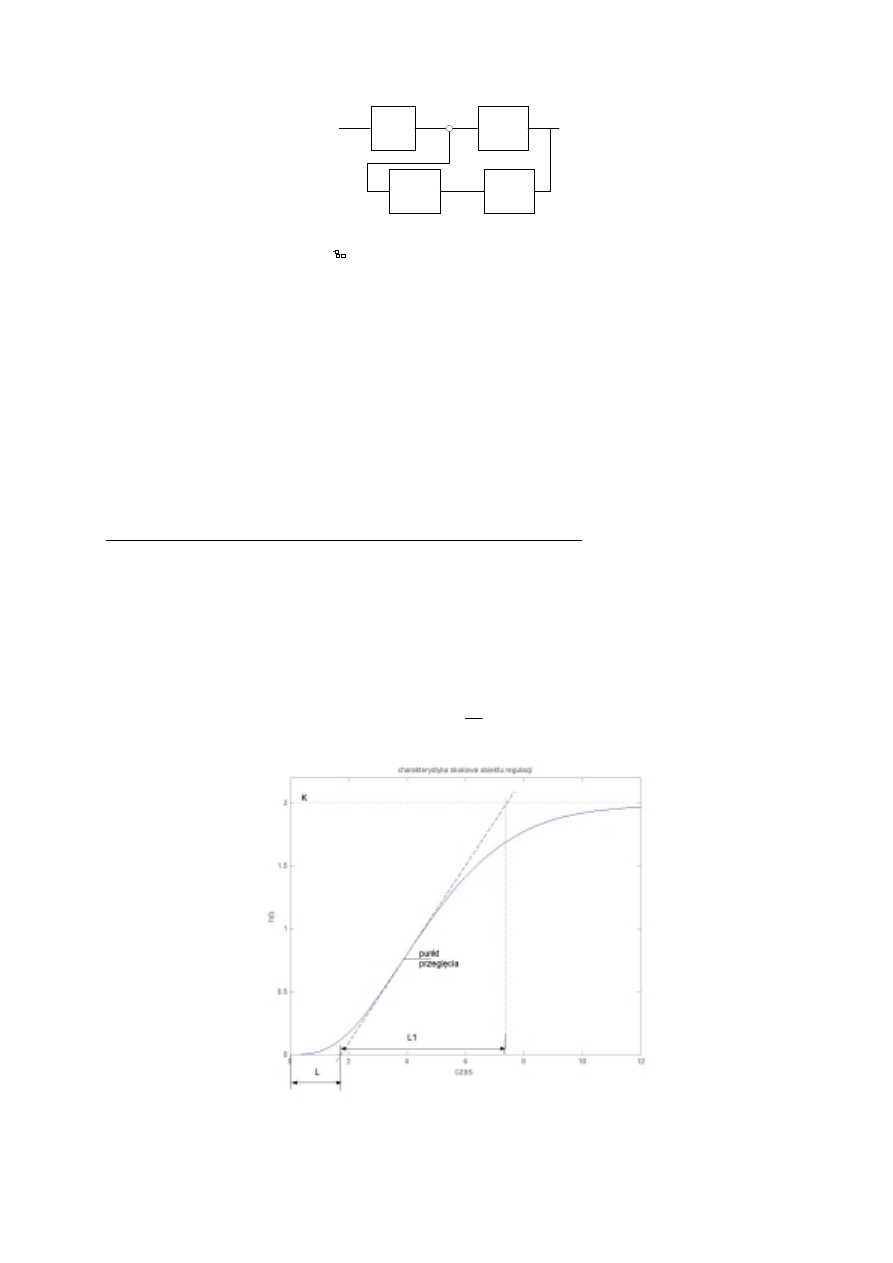
F
G
C
H
F
G
H
C
r
Rys. Schemat blokowy układu zamkniętrego, na który oddziaływują zakłócenia
Wyznaczyć podstawowe wskaźniki jakości regulacji takie jak: uchyb ustalony.maksymalne
przeregulowanie oraz czas regulacji ( można skorzystać z opcji pomiaru pod Matlabem / kliknąć
prawym przyciskiem myszki – Characteristics – Peak response lub Settling Time /) W protokole
odrysować przebiegi wielkości regulowanej z zaznaczeniem pomierzonych wielkości
Dobre wyniki pracy zamkniętego układu regulacji otrzymuje się przy niezmiennej wartości zadanej i
kompensacji pojawiających się zakłóceń .
Jeśli otrzymane przebiegi nie będą satysfakcjonujące, prowadzący zajęcia może nakazać ręczne
dostrojenie regulatora.
ZADANIE 3.
Dobór nastaw regulatorów według II metody Zieglera-Nicholsa
oraz innych metod bazujących
na odpowiedzi skokowej obiektu.
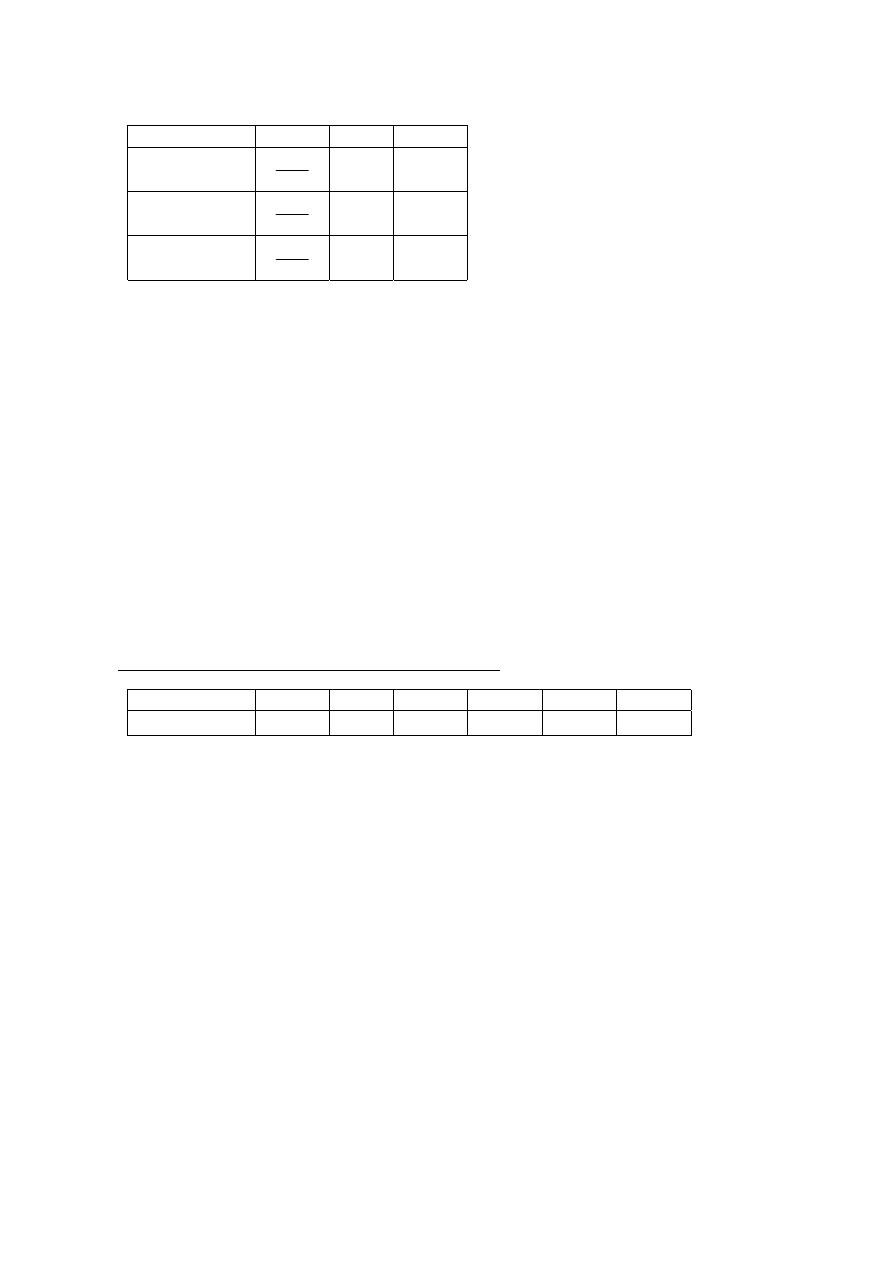
Dobór nastaw regulatorów musi uwzględnić dynamikę obiektu. Inna metoda doboru nastaw
zaproponowana przez Zieglera i Nicholsa odnosi się do obiektów wieloinercyjnych. Aby dobrać
nastawy należy wykonać charakterystykę skokową układu otwartego ( w praktyce jest to
charakterystyka obiektu) a następnie w oparciu o nią wyznaczyć dwa parametry: L i R. W tym celu w
punkcie przegięcia charakterystyki skokowej wyznaczamy styczną, która przetnie oś odciętych w
punkcie t=L, zaś asymptotę przebiegającą na poziomie h(
∞
)=K w punkcie t
L1
=L1+L. Poszukiwany
parametr R obliczyć można z zależności :
1
L
K
R
=
Rys. Charakterystyka skokowa obiektu wieloinercyjnego.
Opóźnienie względne jest w tym przypadku równe L/L1.
Typ regulatora
K
p,
T
i
T
d
P
R
L
⋅
1
-
-
PI
R
L
.
⋅
9
0
3.3 *L
PID
R
L
.
⋅
2
1
2* L
0.5 * L
Tabela nastaw regulatorów według II metody Zieglara- Nicholsa
Podobnie jak w zadaniu 2 zarejestrować przebiegi uchybu regulacji i wyznaczyć podstawowe
wskaźniki jakości regulacji e
ust
, t
r
oraz maksymalnego przeregulowania.
II.
PROTOKÓŁ DO ĆWICZENIA Data wykonania : . . . . . . . .
Przez :
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Temat:
DOBÓR NASTAW REGULATORÓW.
Zadanie 1
Badanie charakterystyk podstawowych regulatorów liniowych.
Typ regulatora
K
p,
T
i
T
d
T1
T2
T3
PID
____________________________________________________________________________
t [s]
Rys. 2 Charakterystyka skokowa regulatora PID z rzeczywistym członem różniczkującym
Zadanie 2
I metoda Zieglera-Nicholsa
1) Wpisać do przestrzeni roboczej transmitancję obiektu ( podana przez prowadzącego ), a także transmitancje
regulatorów w postaci ogólnej ( z symbolami nastaw np. Kp*Ti ) sprowadzonej do wspólnego mianownika
.
2)
Wyznaczenie wzmocnienia krytycznego oraz okresu os
cylacji
K
kr
=
t
y
Rys. Pomiar okresu oscylacji niegasnących układu na granicy stabilności.
Imię Nazwisko
3) Zamodelowanie pod sisotool przebiegów wielkości regulowanej y(t) i wyznaczenie podstawowych
wskaźników jakości regulacji
t [s]
y
1
0.5
0
0
Rys. Przebieg wielkości regulowanej układzie z regulatorem P, dobranym według I metody Z-N przy
skokowej zmianie . . . . . . . . . . . . . . . . . . . . . . . .
t [s]
y
1
0.5
0
0
Rys. Przebieg wielkości regulowanej w układzie z regulatorem PI, dobranym według I metody Z-N
Przy skokowej zmianie .............
t [s]
y
1
0.5
0
0
Rys. Przebieg wielkości regulowanej w układzie z regulatorem PID, dobranym według I metody Z-N
Zadanie 3
Dobór nastaw regulatorów z wykorzystaniem metod bazujących na charakterystyce
skokowej układu otwartego.
Dla tego samego obiektu regulacji, co w dwóch poprzednich zadaniach wykonać charakterystykę
skokową obiektu:
t [s]
y
0
0
Rys. Charakterystyka skokowa obiektu regulacji . Wyznaczenie parametrów L i R
L= R= opóźnienie względne -
=
1
L
L
..............................................................................
Jeśli opóźnienie względne zawiera się w granicach 0.20.7 można stosować regulator PID. Dla przedziału 0.7-1.0
wystarczy regulator PI.
t [s]
y
1
0.5
0
0
Rys. Przebieg wielkości regulowanej y=f(t) z regulatorem PID o nastawach dobranych według II metody
Zieglera- Nicholsa przy skokowej zmianie ........................................................
t [s]
y
1
0.5
0
0
Rys. Przebieg wielkości regulowanej y=f(t) z regulatorem PI o nastawach dobranych według II metody
Zieglera- Nicholsa przy skokowej zmianie ........................................................
III. Sprawozdanie
1. Na podstawie pomierzonych w zadaniu 1 charakterystyk opisać
właściwości poszczególnych typów regulatorów oraz wpływ nastaw na ich
kształt.
2. Na podstawie pomierzonych wskaźników jakości opisać oddziaływanie
poszczególnych regulatorów na proces sterowania w układzie zamkniętym.
3. Porównać wybrane metody doboru nastaw regulatorów.
UWAGI PROWADZĄCEGO ZAJĘCIA .........................................................................
- - - - - - - - - - - - - - - - - -- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -- - - -- -- - -- - - - - - - - - - - - - - - -
.......................................................................................................................................................
----------------------------------- - ZAGADNIENIE --....
data i podpis
Wyszukiwarka
Podobne podstrony:
Banas Chrabaszcz zaoczne Dobor nastaw regulatorów
DOBÓR NASTAW REGULATORA PID
05 Dobor nastaw regulatora w ko Nieznany (2)
DOBÓR NASTAW REGULATORÓW TYPU PID METODĄ CHARAKTERYSTYK SKOKOWYCH
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Dobór nastaw regulatorów
Dobór nastaw regulatora
syposz,podstawy automatyki, DOBÓR NASTAW REGULATORÓW
15 dobor nastaw regulatoraid 16127 ppt
888 banas chrabaszcz zaoczne dobor nastaw regulatorow, szkoła PŚK, Automatyzacja
6 Dobór nastaw regulatorów
6b dobor nastaw regulatora
DOBÓR NASTAW REGULATORÓW TYPU PID METODĄ ZIEGLERA NICHOLSA
PA9 dobor nastaw regulat
05 Dobór nastaw regulatora w komputerowym modelu układu regulacji
więcej podobnych podstron