
Dobór nastaw regulatora
Nastawy regulatorów można dobierać w
dwojaki sposób : ręcznie lub automatycznie.
Przy ręcznym wprowadzeniu nastaw wartość
parametrów pracy regulatora powinny być
proste do ustalenia oraz gwarantować
wymagane wskaźniki jakościowe i to zarówno
przy zmianie wartości zadanej, jak i zakłóceń.

Dobór nastaw regulatora
W sytuacji ręcznego wprowadzania nastaw stosuje się
następujące metody:
Dobór nastaw w funkcji parametrów obiektu (procesu)
regulowanego dla przyjętego kryterium jakości regulacji. Są to
najczęściej zestawienia tabelarycznie sporządzane dla
różnych klas obiektów (statyczne, astatyczne, oscylacyjne
itp..) i różnych oddziaływań (zmiana wartości zadanej lub
zakłóceń). Podstawową wadą tej metody jest konieczność
uprzedniej identyfikacji parametrów obiektu metodą skoku
jednostkowego.
Metody:
•Astrom-Hagglund
•Chien
•Hrones
•Reswick
•Cohen-Coon

Dobór nastaw regulatora
W sytuacji ręcznego wprowadzania nastaw stosuje się
następujące metody:
Dobór parametrów metodami doświadczalnymi. Pozwalają one
na nastawienie parametrów regulatora po ich zainstalowaniu
w układzie bez identyfikacji dynamiki obiektu regulowanego.
Najpopularniejsze i najczęściej stosowane są reguły Zieglera-
Nicholsa. Istnieje także wiele mutacji tej metody, stworzonych
na jej podstawie.
Mutacje metody:
•Pessen
•Hanssen-Offereins

Dobór nastaw regulatora
Kolejność postępowania przy stosowaniu reguł Zieglera- Nicholsa jest
następująca:
1. Nastawiamy regulator na działanie tylko proporcjonalne. Działania
całkujące i różniczkujące (jeśli występują) powinny być wyłączone
przez nastawienie T
i
→∞ oraz T
d
→0.
2. Zwiększamy wzmocnienie proporcjonalne k
p
regulatora aż do
wystąpienia oscylacji niegasnących w układzie (stała amplituda
oscylacji – granica stabilności).
3. Określamy okres oscylacji granicznych T
osc
oraz krytyczne
wzmocnienie proporcjonalne k
kr
, przy którym one wystąpiły.
4. Zależnie od regulatora należy przyjąć następujące nastawy:
Dla regulatora P: k
p
=0.5 k
kr
,
Dla regulatora PI: k
p
=0.45 k
kr
, T
i
=0.85 T
osc
,
Dla regulatora PID: k
p
=0.6 k
kr
, T
i
=0.5 T
osc
, T
d
=0.12 T
osc
.

Dobór nastaw regulatora
W przypadku automatycznego wprowadzania nastaw
korzysta się z następujących metod:
Regulator – po przełączeniu w tryb pomiar – wyznacza
wartość parametrów nastaw regulatora; jeżeli
parametry te ulegają zmianie podczas pracy URA, to
następuje autoadaptacja nastaw (autotuning).
W
nowoczesnych
regulatorach
nastawami
są
pożądane
wartości
przebiegów
przejściowych
(maksymalne przeregulowanie, czas regulacji, błąd
ustalony itp.). Parametry te mogą być odczytane przez
regulator po narysowaniu przez użytkownika na
ekranie LCD regulatora wymaganego przebiegu
wielkości regulowanej.
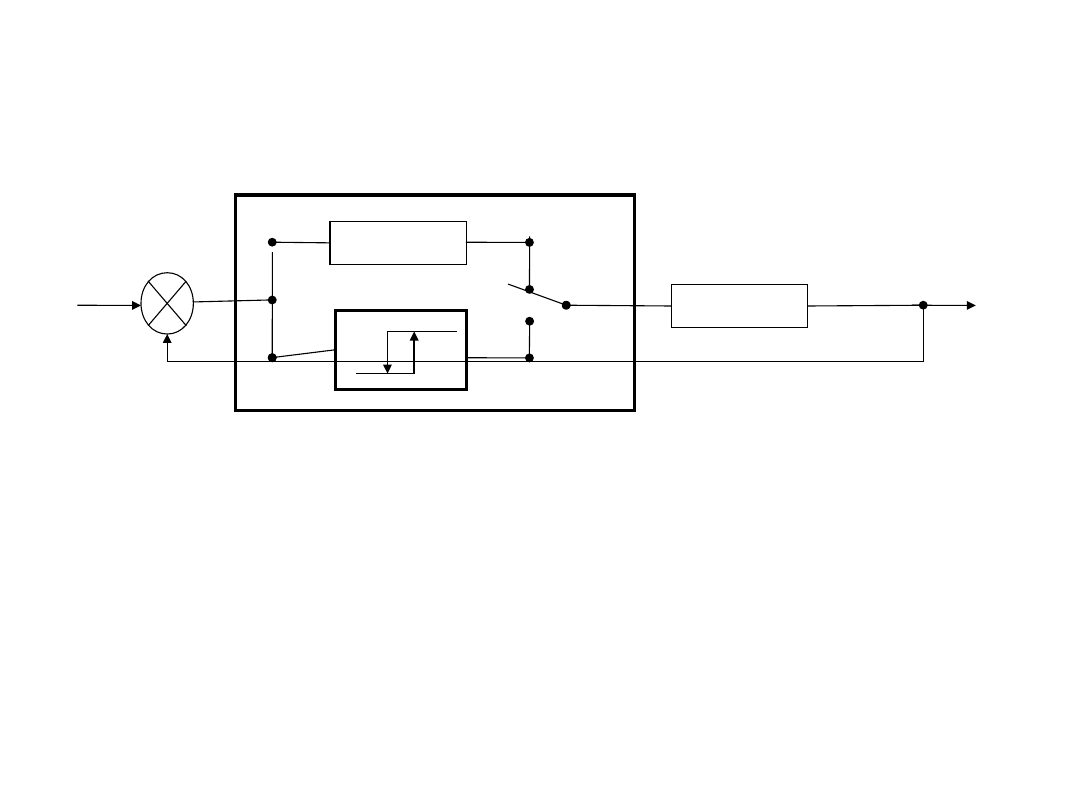
Dobór nastaw regulatora
PID
Obiekt
Praca
Pomiar
Y0 +
-
Regulato
r
u
y
Tryb normalnej pracy regulatora (praca) i identyfikacji (pomiar) parametrów cyklu
granicznego

Dobór nastaw regulatora
Ogólne reguły doboru nastaw regulatorów na
podstawie stałych czasowych obiektu To, T.
2
,
0
0
T
T
1
0
T
T
1
0
T
T
Raczej regulator dwupołożeniowy
Regulator ciągły P, PI, PD, PID
Regulator ciągły P, PI, raczej bez akcji D
Document Outline
Wyszukiwarka
Podobne podstrony:
Banas Chrabaszcz zaoczne Dobor nastaw regulatorów
DOBÓR NASTAW REGULATORA PID
05 Dobor nastaw regulatora w ko Nieznany (2)
DOBÓR NASTAW REGULATORÓW TYPU PID METODĄ CHARAKTERYSTYK SKOKOWYCH
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Dobór nastaw regulatorów
Dobór nastaw regulatorów
Dobór nastaw regulatora
syposz,podstawy automatyki, DOBÓR NASTAW REGULATORÓW
15 dobor nastaw regulatoraid 16127 ppt
888 banas chrabaszcz zaoczne dobor nastaw regulatorow, szkoła PŚK, Automatyzacja
6 Dobór nastaw regulatorów
DOBÓR NASTAW REGULATORÓW TYPU PID METODĄ ZIEGLERA NICHOLSA
PA9 dobor nastaw regulat
05 Dobór nastaw regulatora w komputerowym modelu układu regulacji
więcej podobnych podstron