Strona 1 z 3
Metoda Ritza
w zastosowaniu do belek na sprężystych podporach
Przykład liczbowy
Leszek Chodor
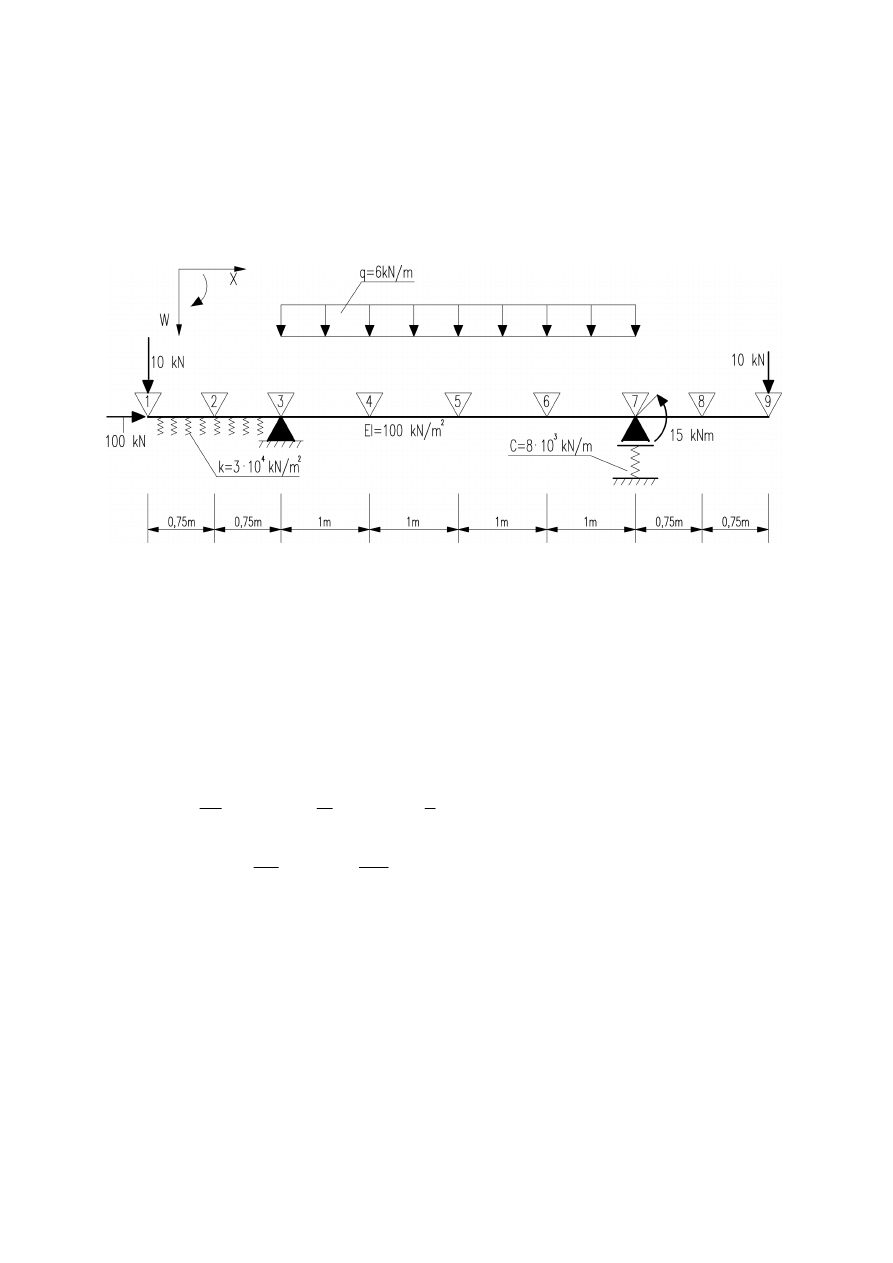
Dla belki pokazanej na rys. 1 wyznaczyć przybliżoną linię ugięcia metodą Lagrange’a-Ritza
Ograniczyć się do II przybliżenia.
1. Funkcjonał energii potencjalnej Lagrange’a
Funkcjonał energii potencjalnej Lagrange’a
Π
dla belki pryzmatycznej na podłożu sprężystym
ze stałą sprężystości
)
(x
k
, obciążonej rozłożonym obciążeniem
)
(x
q
i ściskanej siłą
)
(x
N
,
ze sprężystymi podporami skupionymi ze stałymi sprężystości [pionowa,
obrotowa]=
)
](
,
[
k
M
V
x
C
C
]oraz z obciążeniem skupionym
)
](
,
[
k
x
M
V
zlokalizowanym w
punkcie o współrzędnej
k
x
, można zapisać w postaci:
{
}
∫
+
−
+
−
=
Π
l
k
N
EJ
dx
x
w
x
q
x
w
x
w
x
w
0
2
2
2
2
2
2
)
(
)
(
)]
(
'
[
)]
(
'
[
)]
(
"
[
(1)
{
}
∑
−
−
+
k
k
k
k
k
k
C
k
C
x
w
M
x
w
V
x
w
x
w
M
V
)
(
'
)
(
)]
(
'
[
)]
(
[
2
2
2
2
,
gdzie w(x)- funkcja ugięcia belki, EJ –sztywność giętna belki względem głównej osi zginania.
Uwaga: W przyjętym układzie współrzędnych pokazany na rys.1, oś w skierowana jest do dołu, więc kąty obrotu
i momentu zginające są dodatnie, jeśli są zgodne z ruchem wskazówek zegara (ogólnie z ruchem od osi x do w).
2. Metoda Ritza minimalizacji funkcjonału
W metodzie Ritza poszukuje się funkcji realizującej minimum funkcjonału w klasie
wielomianów:
∑
+
=
=
n
i
i
i
x
a
x
w
1
0
)
(
)
(
ϕ
ϕ
(2)
Rys.1. Rozwiązywana belka
Strona 2 z 3
Funkcje aproksymujące muszą być dopuszczalne, czyli spełniać warunki brzegowe.
Warunkiem koniecznym stacjonarności funkcjonału
Π
jest zerowanie się jego pochodnych
funkcjonału podług stałych w funkcjach Ritza:
,
0
...
1
=
=
=
∂
Π
∂
∂
Π
∂
i
a
a
(3)
który prowadzi do układu równań , z których wyznacza się stałe funkcji aproksymujących.
3. Metodologia podej
ś
cia w zadaniu
Warunek stacjonarności (3) zastosowany do funkcji podcałkowych (1) z podstawioną
aproksymacją (2), doprowadzi do układu równań Ritza ze współczynnikami wyrażonymi
stosownymi całkami.
W niniejszym zadaniu, w celu zwiększenia przejrzystości metody – stosuje się podejście
bezpośrednie bez przygotowania ogólnych formuł.
3.1. Przypuszczenie funkcji aproksymuj
ą
cej Ritza
W danych zadania, warunki brzegowe, które powinna spełniać funkcja Ritza, to:
0
)
5
,
1
(
:
)
1
3
3
=
→
=
=
→
w
m
x
x
dla
,
2) innych stabilnych warunków brzegowych nie ustalimy, ponieważ nie są znane reakcje na
podporach sprężystych, w tym podłoża sprężystego. Dlatego w węzłach tych pozostawiamy
swobodę.
Uwaga:
Jeśliby reakcje na podporach sprężystych można było ustalić, to wówczas, znając stałe
sprężystości podpór wyznaczymy również stabilne przemieszczenia i mielibyśmy dodatkowe
warunki brzegowe. Jednym zdaniem zamienilibyśmy statyczne warunki brzegowe na warunki
kinematyczne. W ten sposób, ograniczając ilość możliwych funkcji rozwiązujących ,
zwiększylibyśmy dokładność rozwiązania przybliżonego
Przy zadanych wyżej warunkach brzegowych, przypuszczamy następujące funkcje Ritza:
1)
,
0
0
=
ϕ
2),
2
3
1
)
(
)
(
x
x
x
−
=
ϕ
,
3)
3
3
2
)
(
)
(
x
x
x
−
=
ϕ
,
4) pozostałe człony rozwinięcia pomija się (w myśl zlecenia zadania)
Przypuszczona funkcja ugięcia Ritza ma więc postać:
.
)
(
)
(
)
(
3
3
2
2
3
1
x
x
a
x
x
a
x
w
−
+
−
=
3.2. Wyznaczenie funkcjonału
Π
dla przyj
ę
tej funkcji Ritza
Pochodne funkcji ugięcia, występujące w funkcjonale , wynoszą:
).
(
6
2
)
(
"
,
)
(
3
)
(
2
)
(
'
3
2
1
2
3
2
3
1
x
x
a
a
x
w
x
x
a
x
x
a
x
w
−
+
=
−
+
−
=
Na poszczególnych odcinkach belki mamy:
1) na całej długości belki (x
0
=0x
l
=7m)
),
2037
336
28
(
50
)]
(
"
[
2
2
2
1
2
1
2
2
)
1
0
a
a
a
a
dx
x
w
l
x
x
EJ
+
+
⋅
∫
=
=
Π
na dwóch pierwszych elementach (x
0
=0; x
l
=1,5m)
Strona 3 z 3
{
}
).
6688
,
13
1875
,
15
5
,
4
(
14950
)]
(
'
[
)]
(
'
[
2
2
2
1
2
1
2
2
2
2
)
2
0
a
a
a
a
dx
x
w
x
w
l
x
x
k
N
+
−
⋅
∫
=
+
−
=
Π
3
) na czterech środkowych elementach (x
0
=1,5m; x
l
=5,5m)
{
}
),
64
333
.
21
(
6
)
(
)
(
2
1
)
3
0
a
a
dx
x
w
x
q
l
x
x
+
−
=
∫
−
=
Π
4) w punktach przyłożenia sił i sprężystych podpór kupionych(x
C
=5,5m;x
V
=0m i 7m,
x
M
=5,5m)
)
a
36.75
+
a
15(7
)
163a
5
,
32
(
10
)
64
16
(
4000
)
5
,
5
(
'
)
7
(
)
0
(
(
)]
5
,
5
(
[
2
1
2
1
2
1
2
2
)
4
+
+
−
+
=
=
+
+
−
=
Π
a
a
a
Mw
w
w
V
w
C
3.2. Wyznaczenie punktu stacjonarno
ś
ci funkcjonału
Π
0,
)
64
16
(
128000
)
336
56
(
50
)
15,1875a
-
4950(9a
1
33
3
2
1
2
1
2
1
1
=
+
+
+
+
+
−
=
∂
Π
∂
a
a
a
a
a
0
)
64
512000(16a
)
4074a
a
(336
0
5
27.3375a
(-15.1875a
4950
1
1294
2
1
2
1
2
1
2
=
+
+
+
+
+
+
−
=
∂
Π
∂
a
a
Rozwiązanie tego układu równań, daje
.
0000183906
,
0
,
0000852087
,
0
2
1
=
=
a
a
Linię ugięcia aproksymowano więc funkcją:
3
2
)
5
,
1
(
06
0.00001839
)
5
,
1
(
87
0.00008520
)
(
−
+
−
=
x
x
x
w
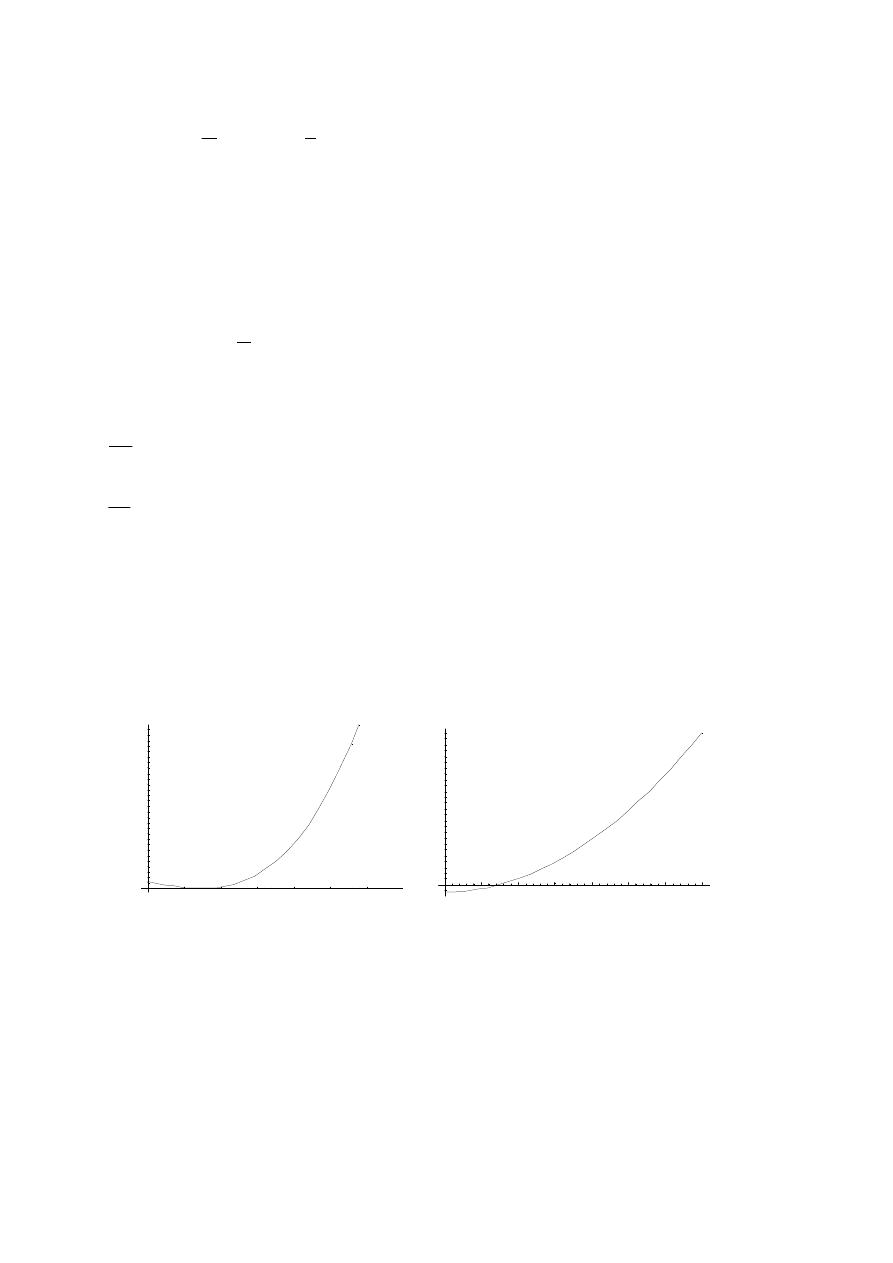
3.3. Wykres linii ugi
ę
cia
Na rys.2 pokazano wykres aproksymowanej linii ugięcia oraz kątów obrotu.
1
2
3
4
5
6
7
0.0005
0.001
0.0015
0.002
0.0025
1
2
3
4
5
6
7
0.0005
0.001
0.0015
0.002
0.0025
Rys.2. Wykres linii ugięcia i kątów obrotu
Wyszukiwarka
Podobne podstrony:
5 3 Zał 1 MES Belka na gruncie Zadania pomocnicze
„Patent jako przykład ochrony na gruncie prawo własności przemysłowej”, Szkoła Studia Prace
Edukacja na Kaszubach; przykłady edukacji regionalnej i regionalizacji nauczania
na egzamin przykladowe zadania
Dom budowany na gruncie żony nie należy do męża
Scharakteryzuj (na wybranych przykładach) słownictwo internetowe 4
Pytania na chrześcijaństwo przykładowe
Ciasto na gofry, przykłady form wypowiedzi
motyw samotnosci(1), matura (motyw samotnosci w literaturze. omow temat na wybranych przykladach)
podloga na gruncie id 364776 Nieznany
Oczyszczanie sciekow przemyslowych na wybranym przykladzie, ochrona środowiska UTP bydgoszcz
protokół utrwalenia na gruncie nowo wyzaczonych punktów granicznych
Wpływ pieniądza na życie bohaterów literackich Zanalizuj problem na wybranych przykładachx
Rola tytułu literackiego na wybranych przykładach
Fundament na gruncie
5 Metody?lsyfikacji formuł na gruncie pierwszorzędowego rachunku kwantyfikatorów
5 Dwa podejścia do ochrony mniejszości na gruncie krajowym Kopia
więcej podobnych podstron