
The word mechatronics was first coined by a senior engineer of a Japanese company; Yaskawa, in 1969, as a combination of
"mecha" of mechanisms and "tronics" of electronics. The word has taken a wider meaning since then and is now widely being
used as a technical jargon to describe a philosophy in engineering technology, more than the technology itself. For this wider
concept of mechatronics, a number of definitions has been proposed in the literature, differing in the particular characteristics
that the definition is intended to emphasize. The most commonly used one emphasizes synergy:
Mechatronics is the synergistic integration of mechanical engineering with electronics and intelligent computer control in the
design and manufacturing of products and processes.
Mechatronics is an interdisciplinary branch of mechanical engineering, electrical engineering and software engineering that is
concerned with integrating electrical and mechanical engineering to create hybrid systems. In this way, machines can be
automated through the use of electric motors, servo-mechanisms, and other electrical systems in conjunction with special
software. A common example of a mechatronics system is a CD-ROM drive. Mechanical systems open and close the drive, spin
the CD and move the laser, while an optical system reads the data on the CD and converts it to bits. Integrated software
controls the process and communicates the contents of the CD to the computer.
Mechatronics is currently used in the following areas of engineering:
Automation, and in the area of robotics.
Servo-Mechanics
Sensing and Control Systems
Automotive engineering, in the design of subsystems such as anti-lock braking systems
Computer engineering, in the design of mechanisms such as hard drives, CD-ROM drives, etc.
The development of mechatronics has gone through three stages.
The first stage corresponds to the years around the introduction of the word. During this stage, technologies used in
mechatronics systems developed rather independently of each other and individually.
1
With the start of the eighties, a synergistic integration of different technologies started taking place, the notable example
being in optoelectronics (i.e. an integration of optics and electronics). The concept of hardware/software co-design also
started in these years.
The third and the last stage can also be considered as the start of the mechatronics age and starts with the early
nineties. The most notable aspect of the third stage is the increased use of computational intelligence in mechatronic
products and systems. It is due to this development that we can now talk about Machine Intelligence Quotient (MIQ).
Another important development in the third stage is the possibility of miniaturization of the components; in the form of
microactuators and microsensors (i.e. micromechatronics).
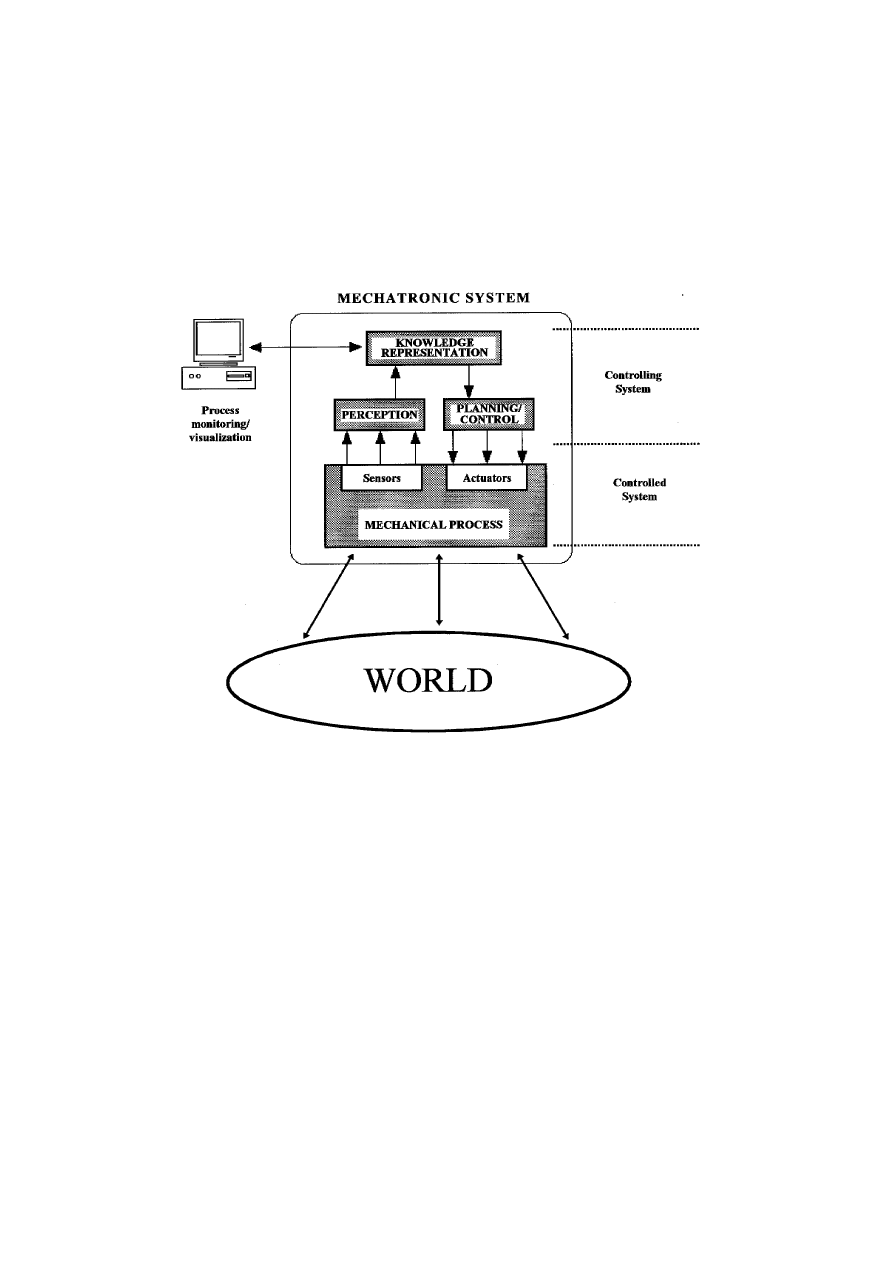
Fig. 1. The architecture of a mechatronic system
A mechatronics system has two main components as shown in Fig. 1. The controlled system is the mechanical process that is in
contact with the world with all of its sensors and actuators. The distinguishing features of a mechatronic system from other
systems are the three sub-systems of the controlling system used for perception, knowledge representation and planning and
control. The intelligence is usually embedded in the planning and control sub-system. Here, based on the information gathered
from the sensors, computational intelligence methodologies are exploited to plan a course of action that will enable the
controlled system to achieve the given tasks. Conventional microprocessors, artificial neural networks, fuzzy logic and
probabilistic reasoning are among the tools used in the sub-system for information processing and decision making.
2
Wyszukiwarka
Podobne podstrony:
A general definition of malware
Mechatronika nowa generacja mas Nieznany
sprawko generator, MECHATRONIKA, IV Semestr, Elektronika Analogowa i Cyfrowa
mat1 twierdzenia definicje, Mechatronika, 1 Rok
Defining the General Motors 2 Mode Hybrid Transmission
Definicja i podzia skazy krwotocznej
Mechatronika4
Ewolucja marketingu era produkcyjna, sprzedazowa, marketingowa Rynek definicja
INTER 1 DEFINICJA
DEFINICJA STRESU
Definicje położnicze
Mechatronika6
1 1 bezpiecz definicjeid 8843 ppt
2 Podstawowe definicje (2)id 19609 ppt
15 Sieć Następnej Generacjiid 16074 ppt
więcej podobnych podstron