
Mechanika
Mechanika
Zajmuje się badaniem stanu równowagi
lub ruchem ciał materialnych.
y
Skł d
i
Składa się:
– kinematyki
y
– kinetyki (statyka i dynamika)
Kinematyka
Kinematyka
Dział mechaniki zajmujący się
matematycznym opisem ruch układu
y
y
p
materialnego, bez wnikania w przyczyny,
które ten ruch wywołały lub zakłóciły
które ten ruch wywołały lub zakłóciły.
Przez ruch rozumie się zmiany położenia
rozważanego obiektu materialnego
rozważanego obiektu materialnego
względem przyjętego układu odniesienia.

Dynamika
Dynamika
Zajmuje się opisem metod wyznaczania
Zajmuje się opisem metod wyznaczania
ruchu układu materialnego pod wpływem
przyłożonego obciążenia
przyłożonego obciążenia.
Statyka
Statyka
Dział mechaniki zajmujący się badaniem
Dział mechaniki zajmujący się badaniem
warunków koniecznych i wystarczających
na to aby układ materialny nie zmieniał
na to, aby układ materialny nie zmieniał
swojego położenia w przyjętym układzie
odniesienia.

Ciało materialne
Ciało materialne
Przez ciało materialne rozumie się
jakikolwiek przedmiot fizyczny dostrzegany
j
p
y
y
g y
naszymi zmysłami.
W mechanice wykorzystujemy przybliżone
W mechanice wykorzystujemy przybliżone
modele ciał rzeczywistych:
– Punkt materialny
– Układ punktów materialnych
p
y
– Ciało sztywne
Punkt materialny
Punkt materialny
Przez punkt materialny rozumie się ciało
Przez punkt materialny rozumie się ciało
materialne, którego rozmiary i kształt nie
są istotne w analizowanym problemie
są istotne w analizowanym problemie.

Układ punktów materialnych
Układ punktów materialnych
Ciało materialne może być traktowane
Ciało materialne może być traktowane
jako układ punktów materialnych
(cząsteczek) o rozmiarach znikomo
(cząsteczek) o rozmiarach znikomo
małych w stosunku do rozmiaru
rozważanego ciała.
Ciało sztywne
Ciało sztywne
Ciało sztywne jest to ciało materialne
Ciało sztywne jest to ciało materialne,
którym odległości każdych dwóch jego
punktów są stałe w czasie
punktów są stałe w czasie.
Wymiary i kształt ciała nie zmieniają się w
czasie ruchu ciała.
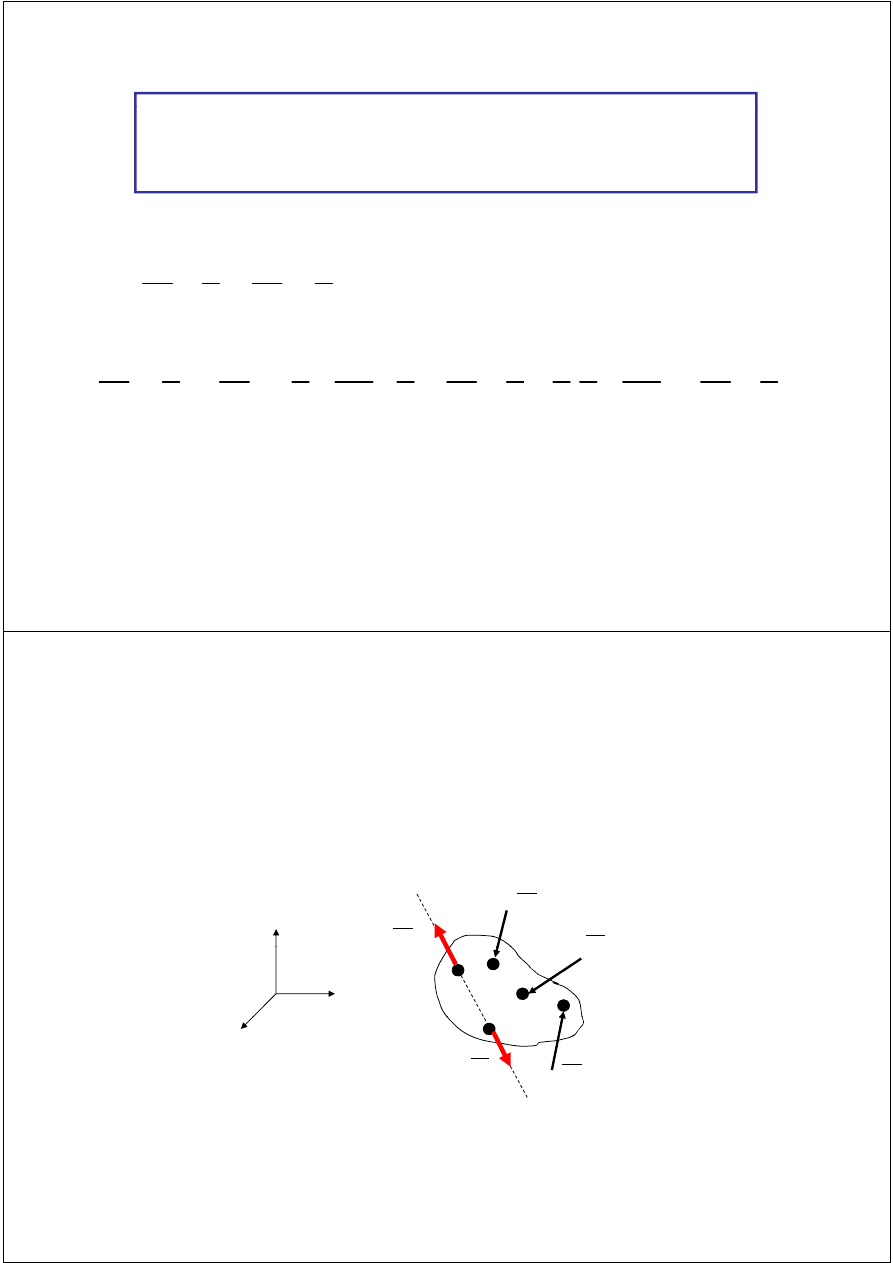
Siła
Siła
Siła jest miarą wzajemnego oddziaływania
ciał przejawiającą się przez zmianę ich
p
j
ją ą ę p
ę
położenia lub utrzymania w położeniu
równowagi
równowagi.
Oddziaływanie to charakteryzuje się:
– linią działania
– Wartościąą
– Zwrotem
Graficznym obrazem siły jest wektor
Graficznym obrazem siły jest wektor
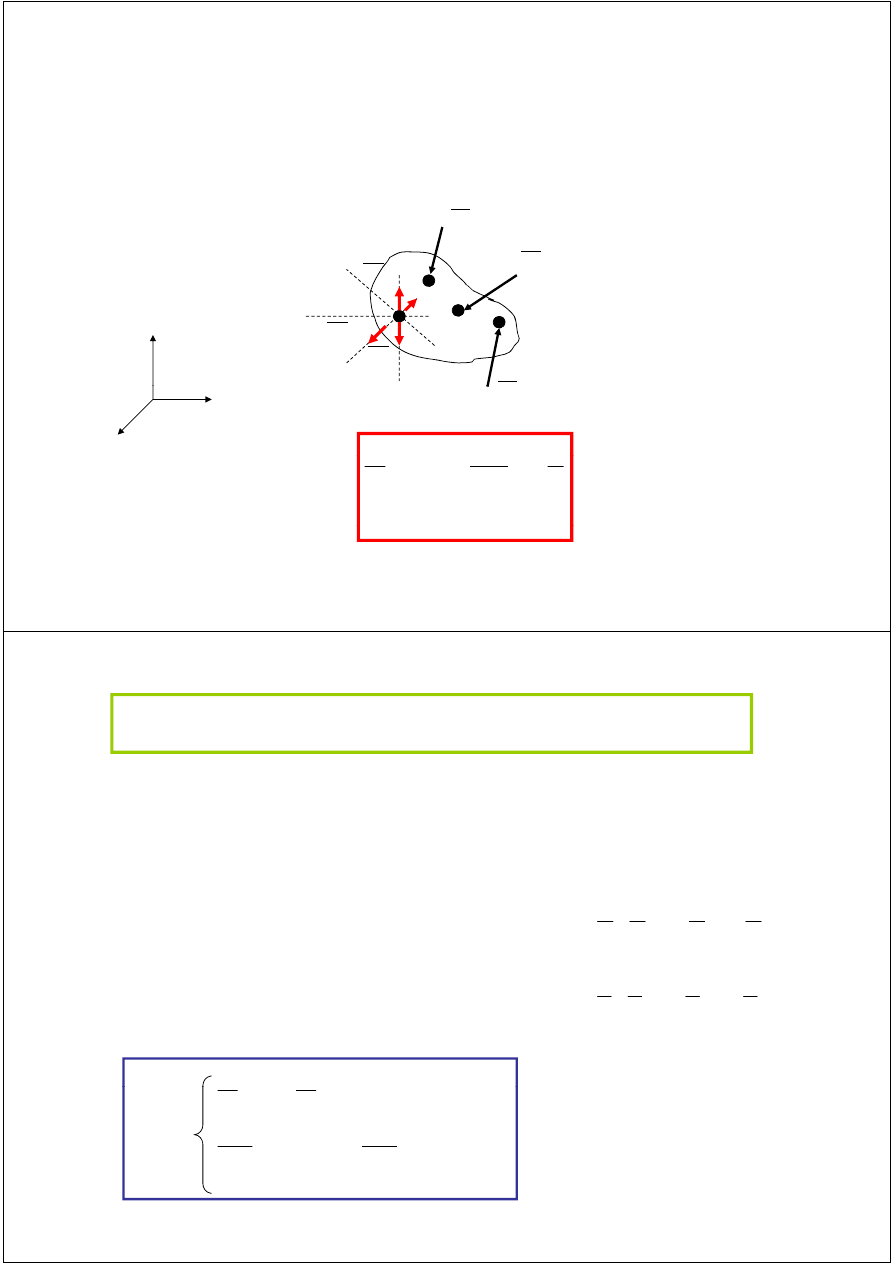
Masa punktu materialnego
Masa punktu materialnego
Masa punktu materialnego jest wielkością
skalarną, określona przez iloraz miary siły
ą,
p
y
y
ciężkości i miary przyspieszenia
ziemskiego
ziemskiego
0
Q
m
df
g
Pęd punktu materialnego
Pęd punktu materialnego
Pęd punktu materialnego jest iloczynem
masy i prędkości
y p ę
df
v
m
p
f
Aksjomaty mechaniki:
Aksjomaty mechaniki:
• Aksjomat bezwładności
• Aksjomat ruchu (prawo ruchu)
Aksjomat ruchu (prawo ruchu)
• Aksjomat wzajemnego oddziaływania
(
k ji i
k ji)
(prawo akcji i reakcji)
1 Aksjomat bezwładności
1. Aksjomat bezwładności
Jeśli na punkt materialny nie działa żadna
Jeś
a pu
a e a y e d a a ad a
siła, to pęd punktu jest stały:
Przy stałym pędzie punkt
0
p
const
p
v
m
p
Przy stałym pędzie punkt
porusza się ruchem
jednostajnym prostoliniowym
0
)
(
const
m
p
r
v
jednostajnym prostoliniowym
v
o
≠ 0
lub jest w spoczynku
0
0
)
(
r
t
v
t
r
v
o
= 0
Bezwładność – ciało bez
udziału innych sił nie może
udziału innych sił nie może
zmienić położenia
2. Aksjomat ruchu (prawo ruchu).
Jeśli na punkt materialny działa siła, to
2. Aksjomat ruchu (prawo ruchu).
zmienia jego pęd według prawa:
d
F
p
dt
d
dt
df
J
li
ł
t t
h
j
j
t ć
v
m
p
f
Jeżeli założymy ze m=const to prawo ruchu przyjmuje postać
F
a
m
F
a
m
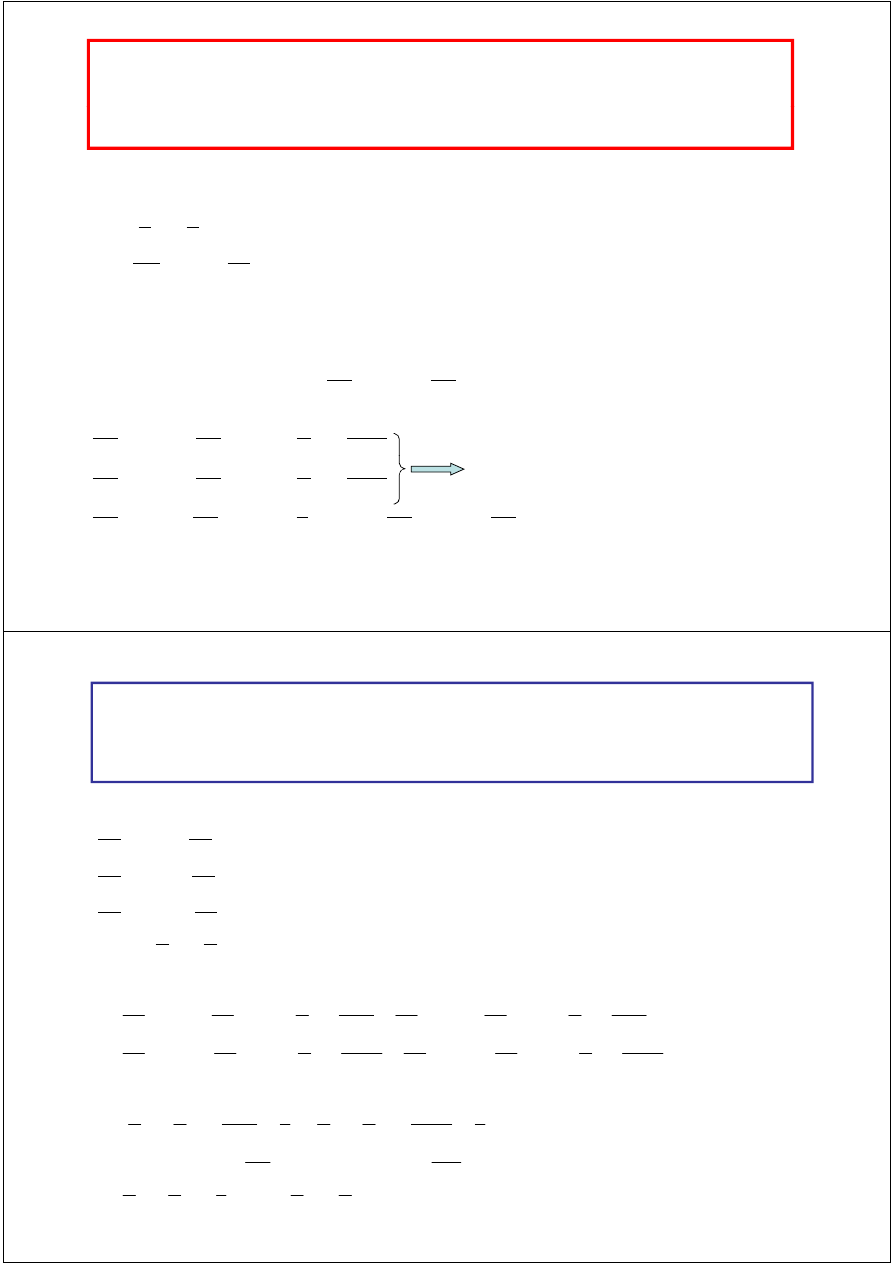
3. Aksjomat wzajemnego oddziaływania
(
k ji i
k ji)
(prawo akcji i reakcji).
Dwa punkty materialne działają na siebie
zawsze wzajemnie z siłami równymi,
zawsze wzajemnie z siłami równymi,
przeciwnie skierowanymi i leżącymi na
jednej prostej:
jednej prostej:
F
B
m
B
AB
F
BA
F
A
m
A
0
BA
AB
F
F
Konwencja sumacyjna Einsteina
Konwencja sumacyjna Einsteina
Jeżeli w wyrażeniu będącym jednomianem
wskaźniki powtarzają się to należy
p
ją ę
y
dokonać sumowania po powtarzających
się wskaźnikach do odpowiedniej
się wskaźnikach do odpowiedniej
wymiarowości obiektu
n
n
n
i
i
i
i
x
a
x
a
x
a
x
a
x
a
...
2
2
1
1
i
1
n
a
a
a
a
a
nn
i
ii
ii
a
a
a
a
a
...
22
11
1
Konwencja sumacyjna Einsteina
Konwencja sumacyjna Einsteina
k
k
k
k
n
m
mn
n
m
mn
x
x
a
x
x
a
k
k
m
n
x
x
a
x
x
a
x
x
a
x
x
a
...
1
1
3
1
13
2
1
12
1
1
11
1
1
k
k
k
k
x
x
a
x
x
a
x
x
a
x
x
a
...
2
2
3
2
23
2
2
22
1
2
21
1
1
3
1
13
2
1
12
1
1
11
...
k
k
kk
k
k
k
k
k
k
x
x
a
x
x
a
x
x
a
x
x
a
...
3
3
2
2
1
1
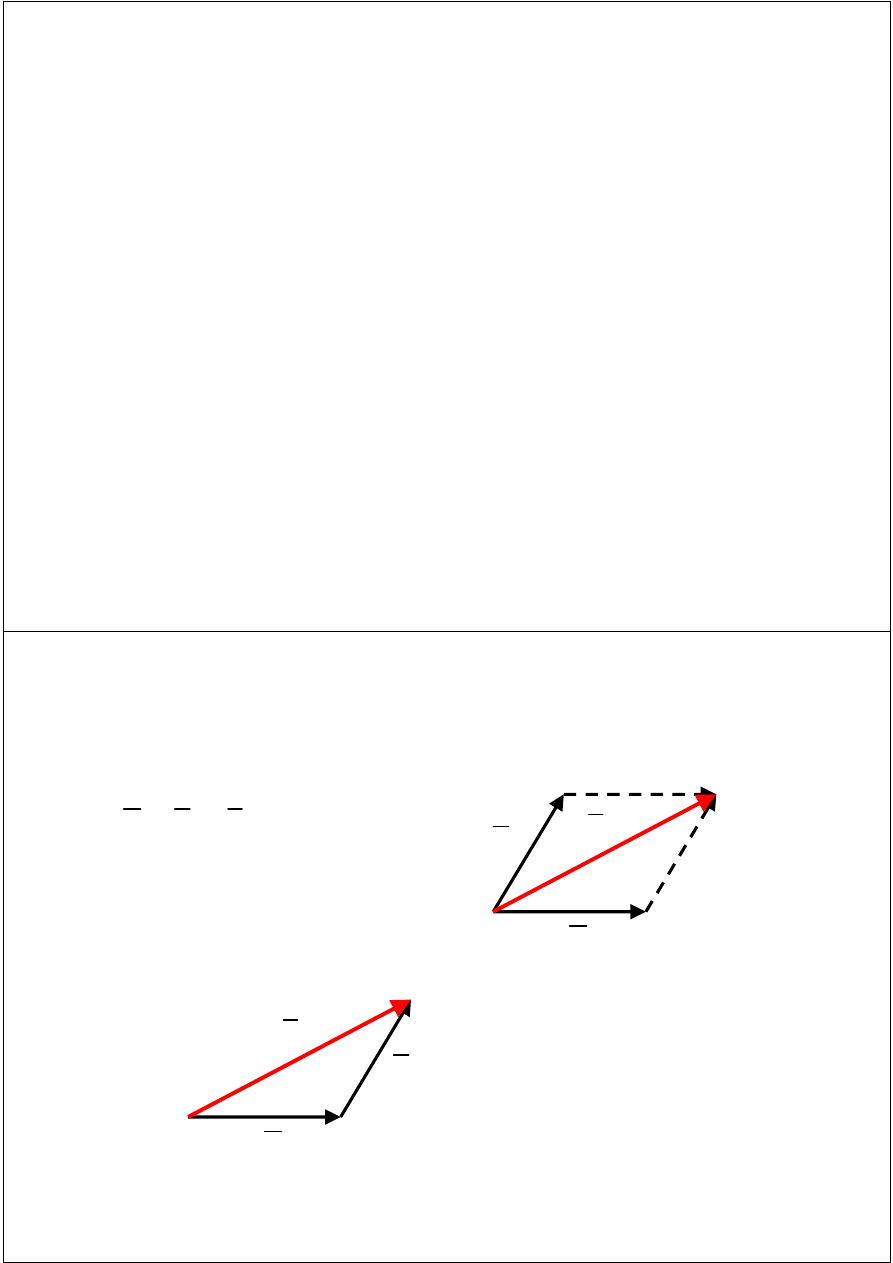
Operacje na wektorach - dodawanie
b
c
b
a
b
c
i
i
i
c
b
a
aa
b
c
b
aa
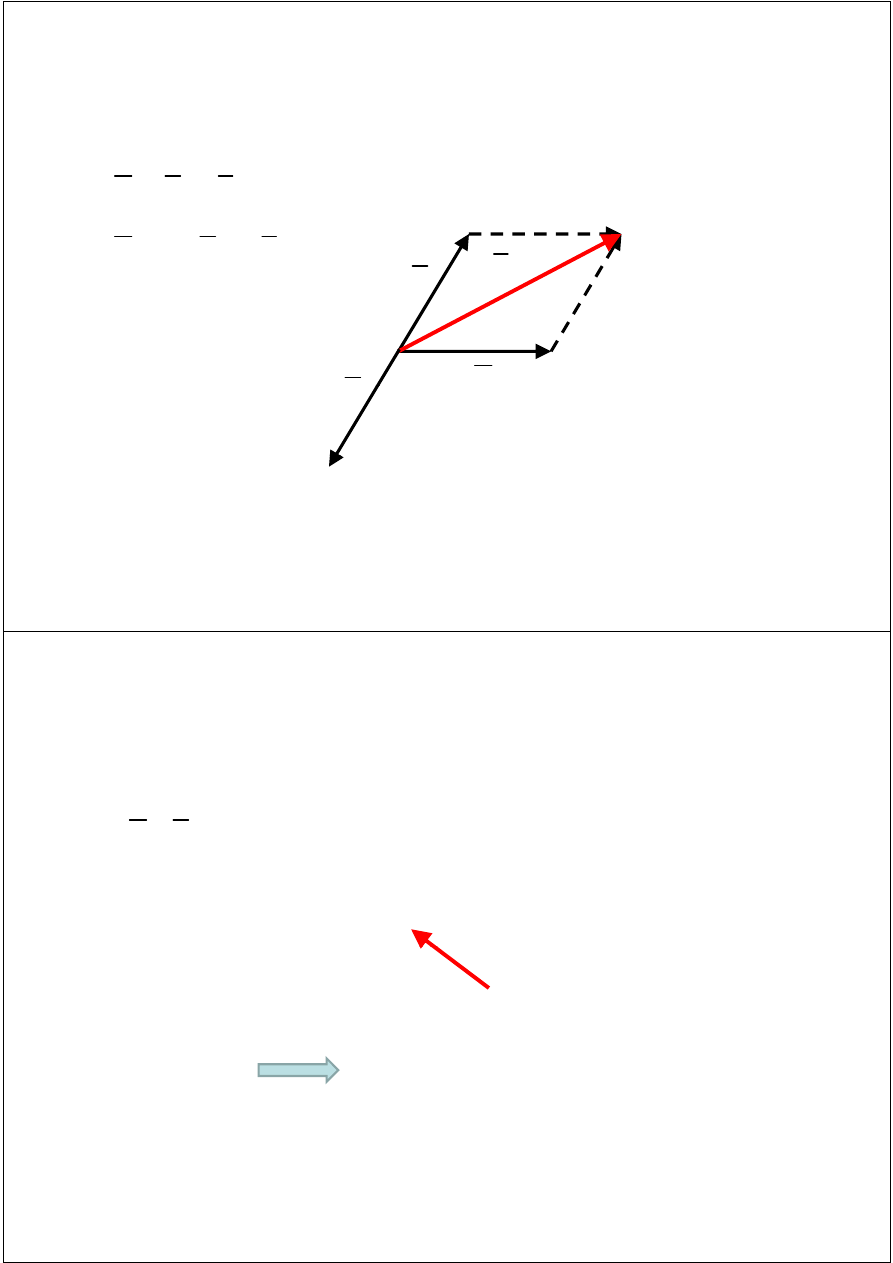
Operacje na wektorach -
odejmowanie
b
c
b
a
c
b
a
b
c
a
b
a
b
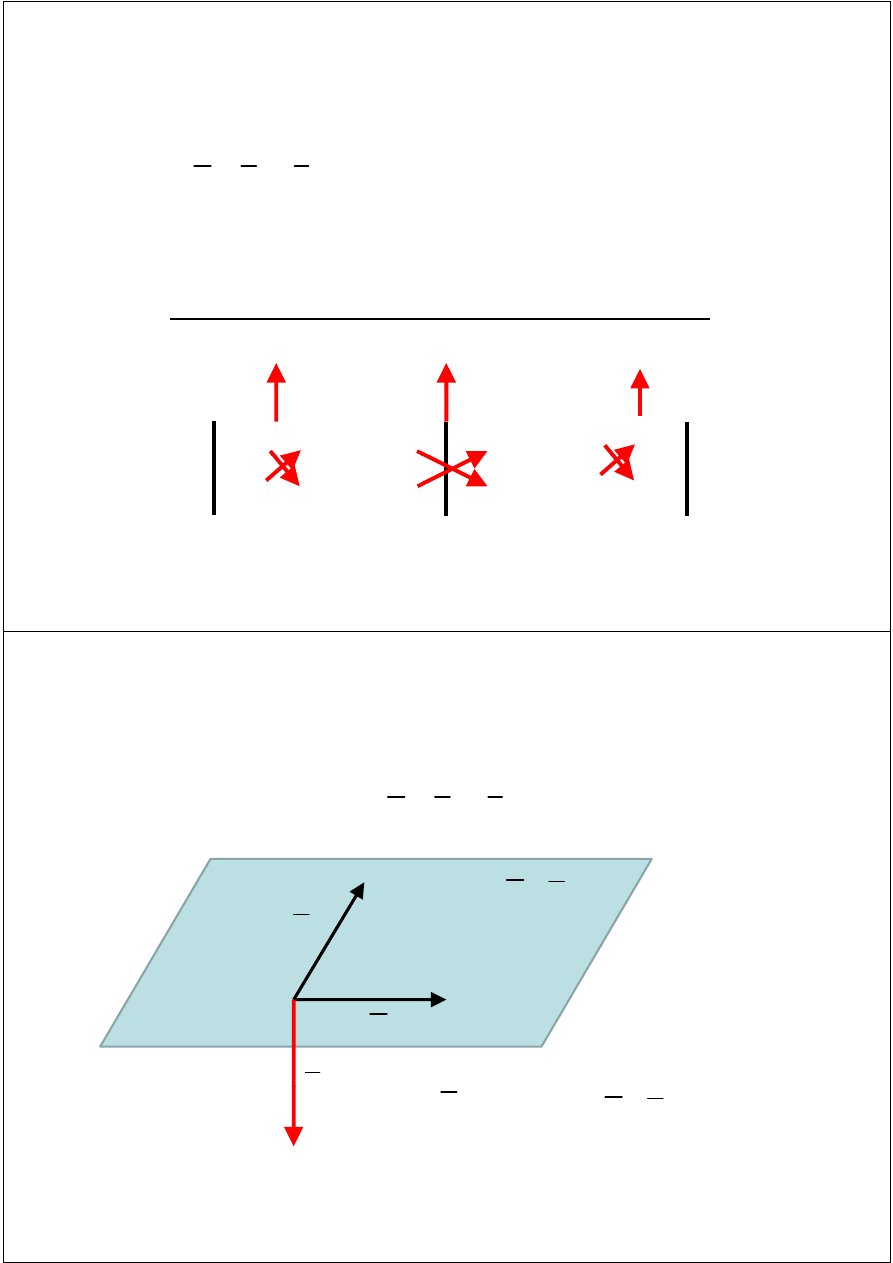
Operacje na wektorach –
iloczyn skalarny
c
b
a
i
i
n
i
i
b
a
b
a
c
i
1
sumacja
j
c
= 0
Wektory są do siebie prostopadłe
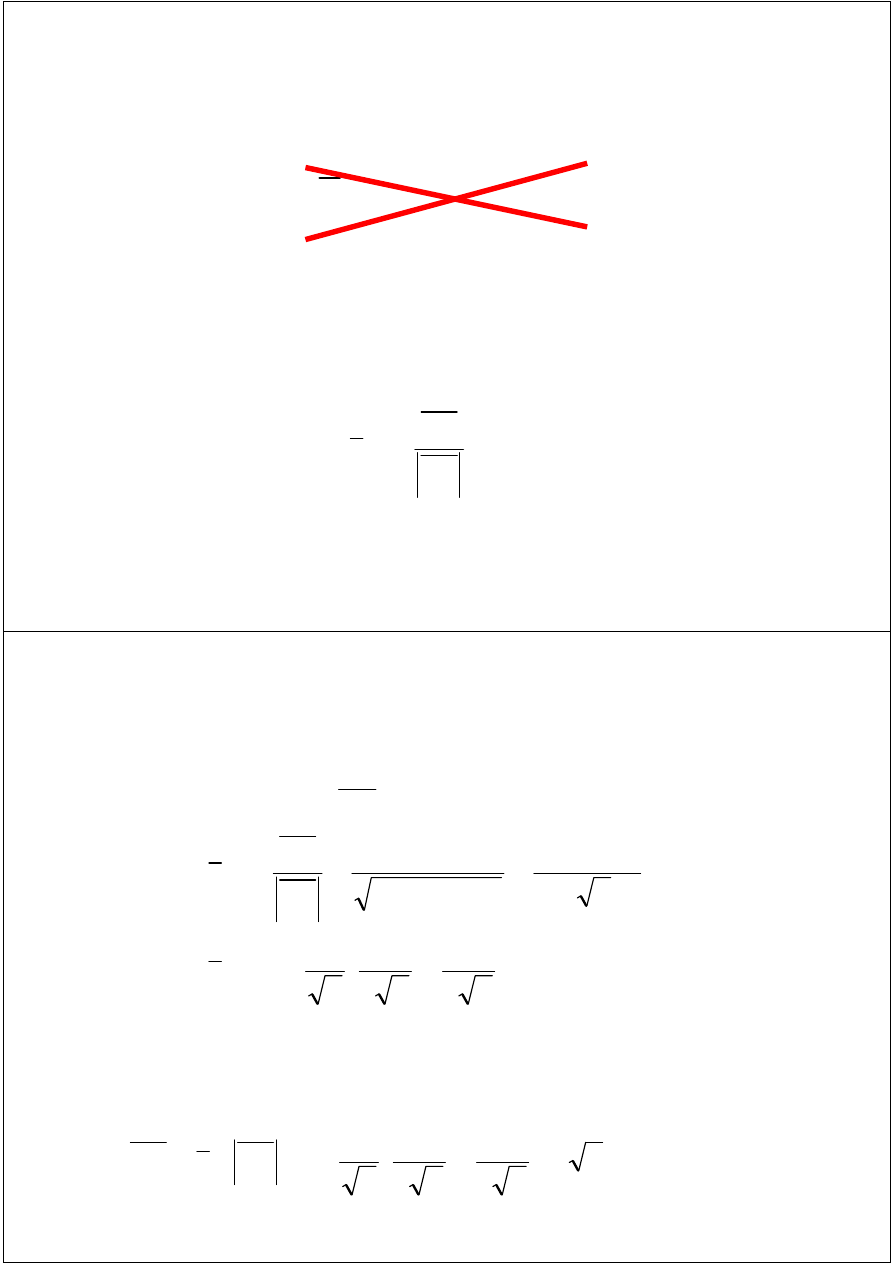
Operacje na wektorach –
iloczyn wektorowy
b c
b
a
a
a
a
3
2
1
3
2
1
,
,
,
,
b
b
b
a
a
a
2
1
2
1
3
1
3
1
3
2
3
2
,
,
a
b
b
a
a
b
b
a
a
b
b
a
3
2
1
,
,
a
a
a
3
2
1
,
,
a
a
a
3
2
1
,
,
a
a
a
3
2
1
3
2
1
,
,
b
b
b
3
2
1
3
2
1
,
,
b
b
b
3
2
1
,
,
b
b
b
Obliczamy wartości podwyznaczników
Dla środkowego wyrazu zmieniamy znak !!!
Operacje na wektorach –
iloczyn wektorowy
b c
b
a
b
a
b
b
a
c
a
b
c
Wersor – wektor jednostkowy
(unormowany)
1
,
1
,
1
e
Wersor to wektor o długości jeden, wskazujący kierunek i
zwrot pewnego wektora początkowego, któremu ten wersor
przypisujemy.
AB
e
AB
AB
e
AB
Wersor – wektor jednostkowy
(unormowany)
3
4
5
AB
3
,
4
,
5
AB
3
,
4
,
5
3
,
4
,
5
AB
AB
e
3
4
1
2
5
3
4
5
2
2
2
AB
AB
e
2
5
3
,
2
5
4
,
2
1
AB
e
Mnożenie wersora przez długość początkowego wektora
odtwarza początkowy wektor
odtwarza początkowy wektor.
3
4
5
2
5
3
4
1
AB
AB
3
,
4
,
5
2
5
2
5
,
2
5
,
2
AB
e
AB
AB
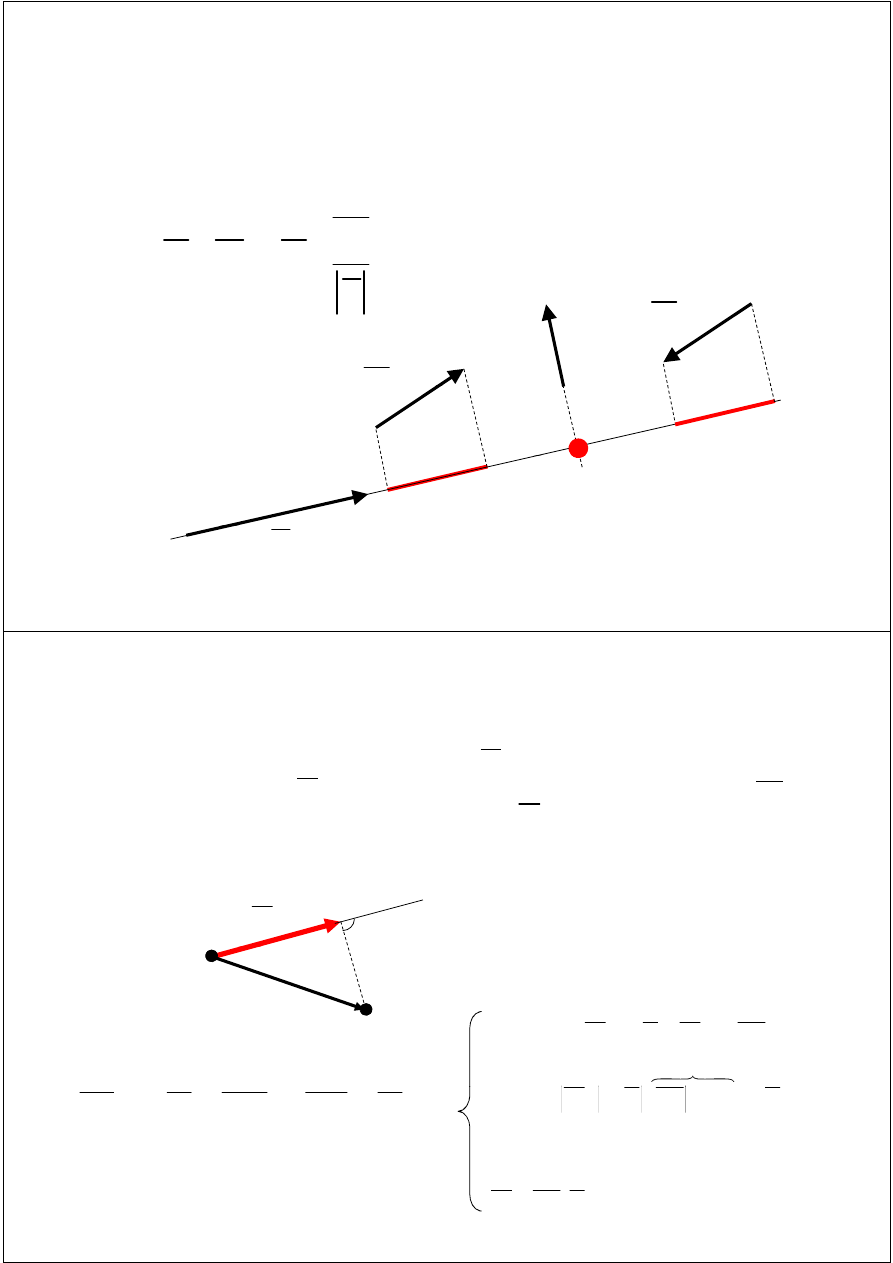
Miara rzutu wektora na prostą
(na kierunek)
a
Szukamy miary rzutu wektora F na kierunek a
a
a
F
e
F
d
a
F
F
F
F
d<0
d>0
d=0
a
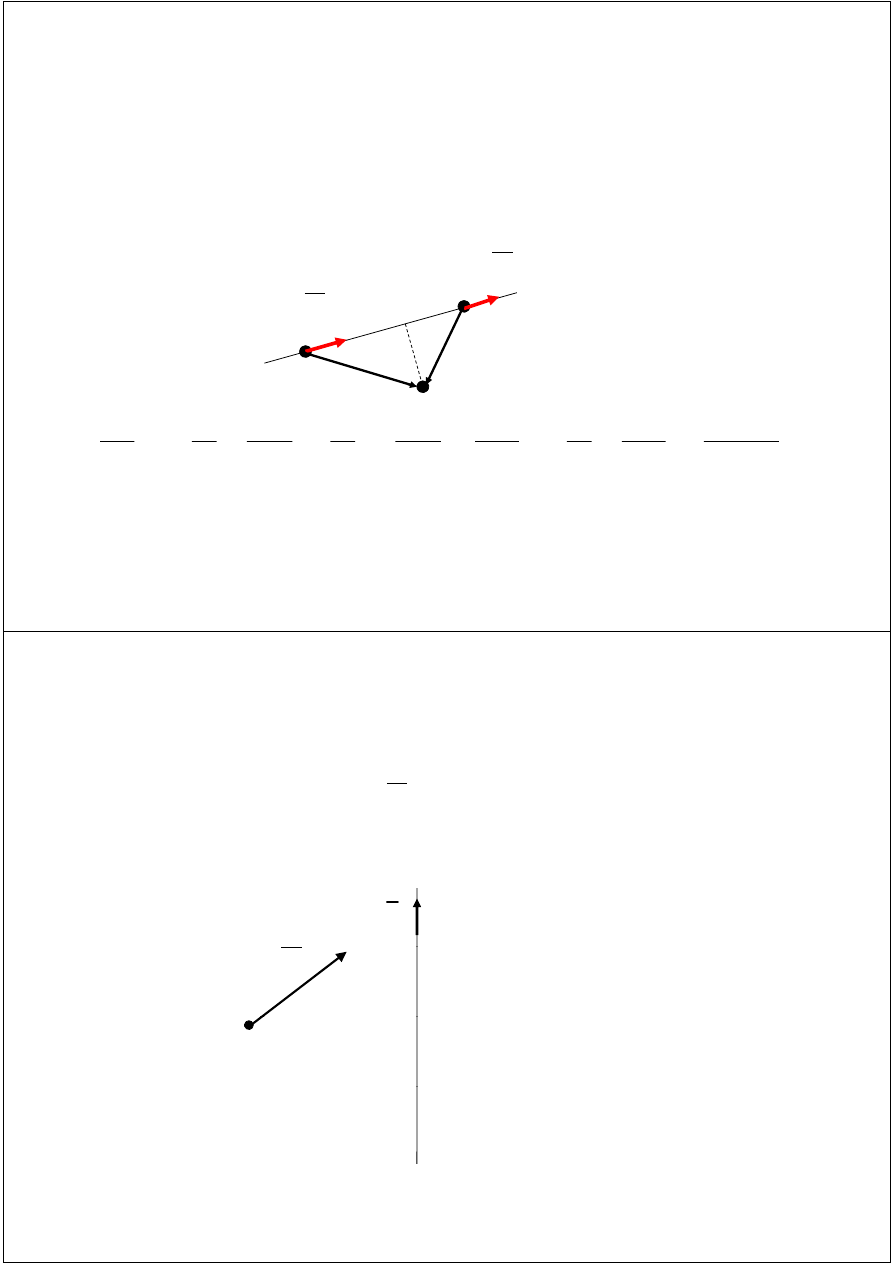
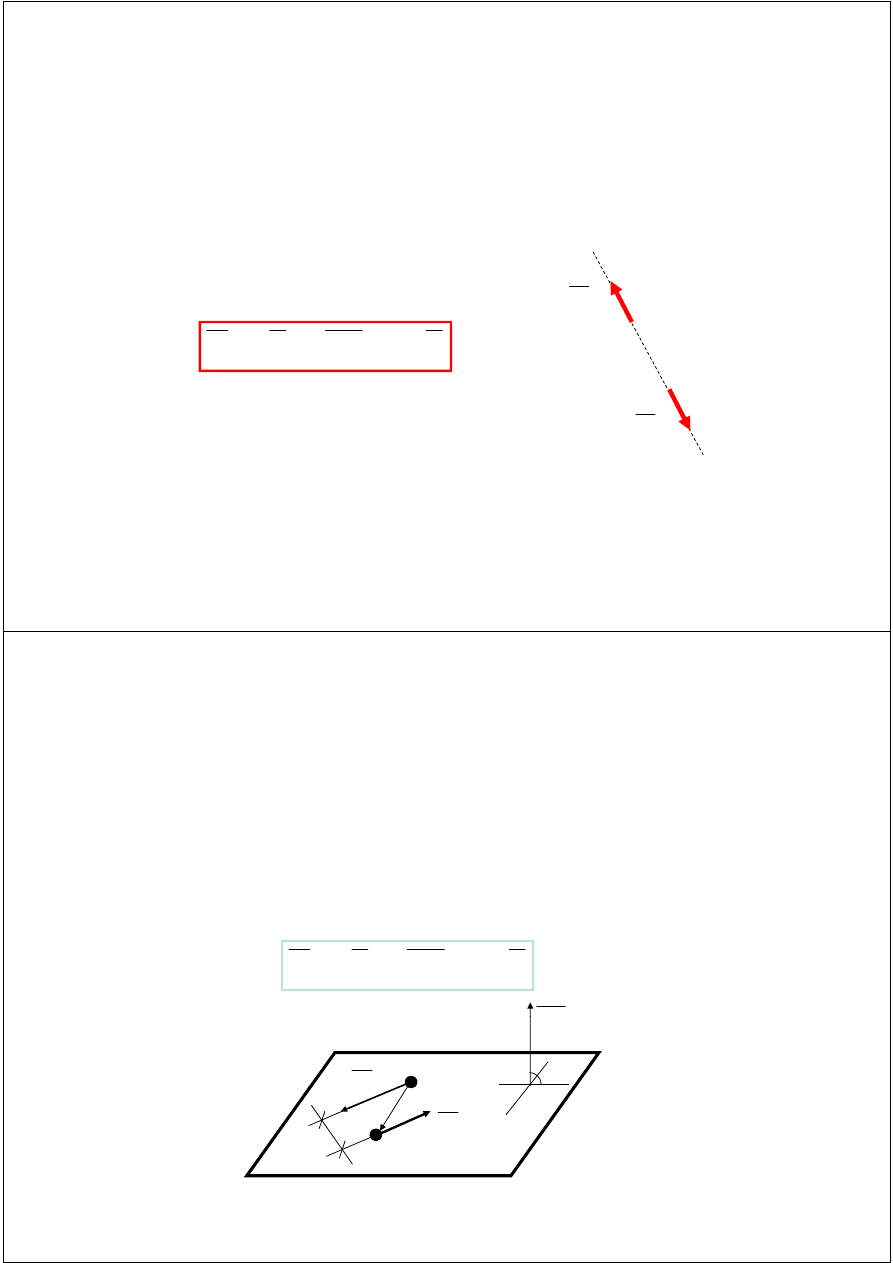
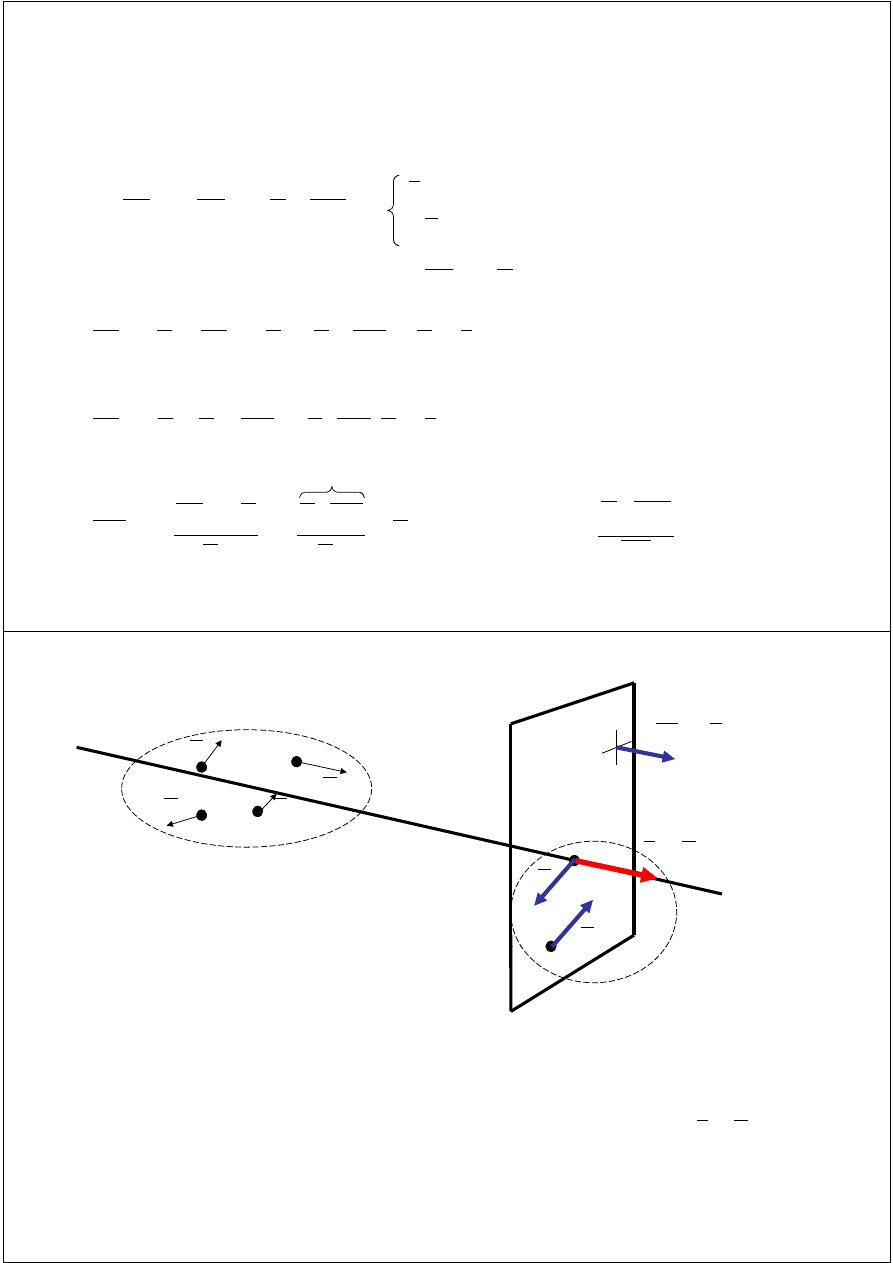
Moment siły względem punktu
Obierzmy dowolny punkt B i siłę zaczepioną w punkcie A.
Momentem siły względem punktu B nazywamy wektor
F
F
B
M
równy iloczynowi wektorowemu siły i wektora łączącego
punkt zaczepienia siły z punktem, względem którego liczymy
t
F
moment:
A
F
.
A
B
r
df
kierunek
AB
M
F
M
B
B
r
B
F
BA
AB
F
M
df
B
moduł
r
F
AB
F
M
B
sin
t t ójk
kt ó
zwrot: trójka wektorów
F
AB
M
B
,
,
jest prawoskrętna
Moment siły względem punktu jest równy zeru, gdy siła
lub jej ramię jest równe zeru
lub jej ramię jest równe zeru.
Gdy siłę lub jej ramię przesuniemy wzdłuż prostej jej
y
ę
j j
ę p
y
p
j j j
działania to moment liczony względem tego samego
punktu nie ulegnie zmianie
F
F
F
A
B
R
const
BR
F
BR
AB
F
AR
F
M
const
BR
F
BR
AB
F
AR
F
M
R
Moment siły względem prostej
Moment siły względem prostej
Niech zadana będzie siła zaczepiona w punkcie A i prosta l.
F
ę
p
p
p
l
l
e
A
F
A
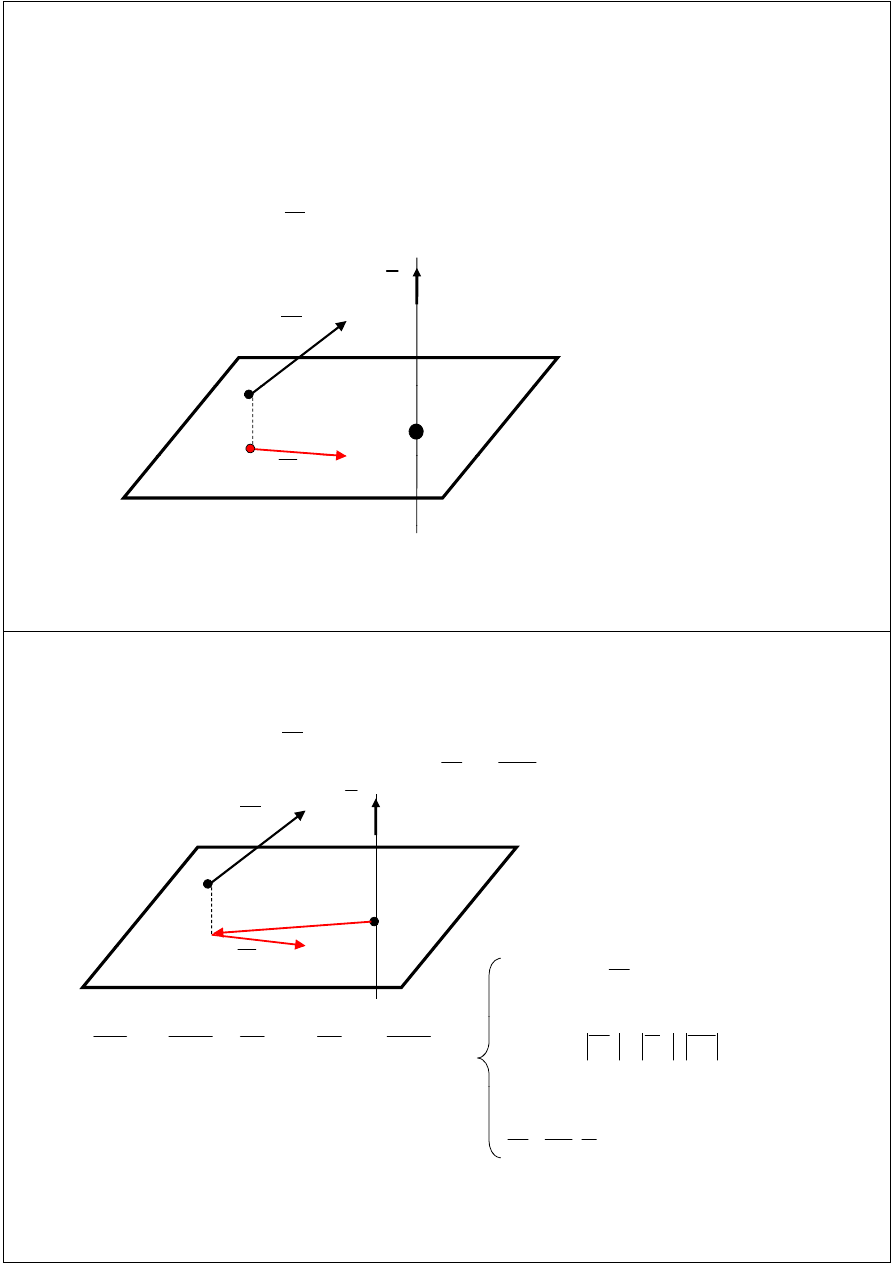
Moment siły względem prostej
Moment siły względem prostej
Na prostej l obierzmy dowolny punkt 0, przez który prowadzimy
p
j
y
y p
, p
y p
y
płaszczyznę prostopadłą do prostej l. Wyznaczmy rzut
prostokątny siły i punktu A na płaszczyznę .
F
l
l
e
A
F
A
A’
O
F
Moment siły względem prostej
F
l
e
Momentem siły zaczepionej w punkcie A względem prostej l
Nazywamy iloczyn wektorowy i .
F
F
0
'
A
l
A
l
e
F
A
A’
O
kierunek
l
M
l
||
F
0
'
'
0
A
F
F
A
M
df
l
moduł
sin
0
'
A
F
M
l
zwrot: wektory
F
A
M
l
,
0
'
,
stanowią trójkę
Moment siły względem prostej
jest równy zeru, gdy prosta wraz
l
,
,
ą
j ę
prawoskrętną
j
y
g y p
z kierunkiem działania siły
leżą w jednej płaszczyźnie.
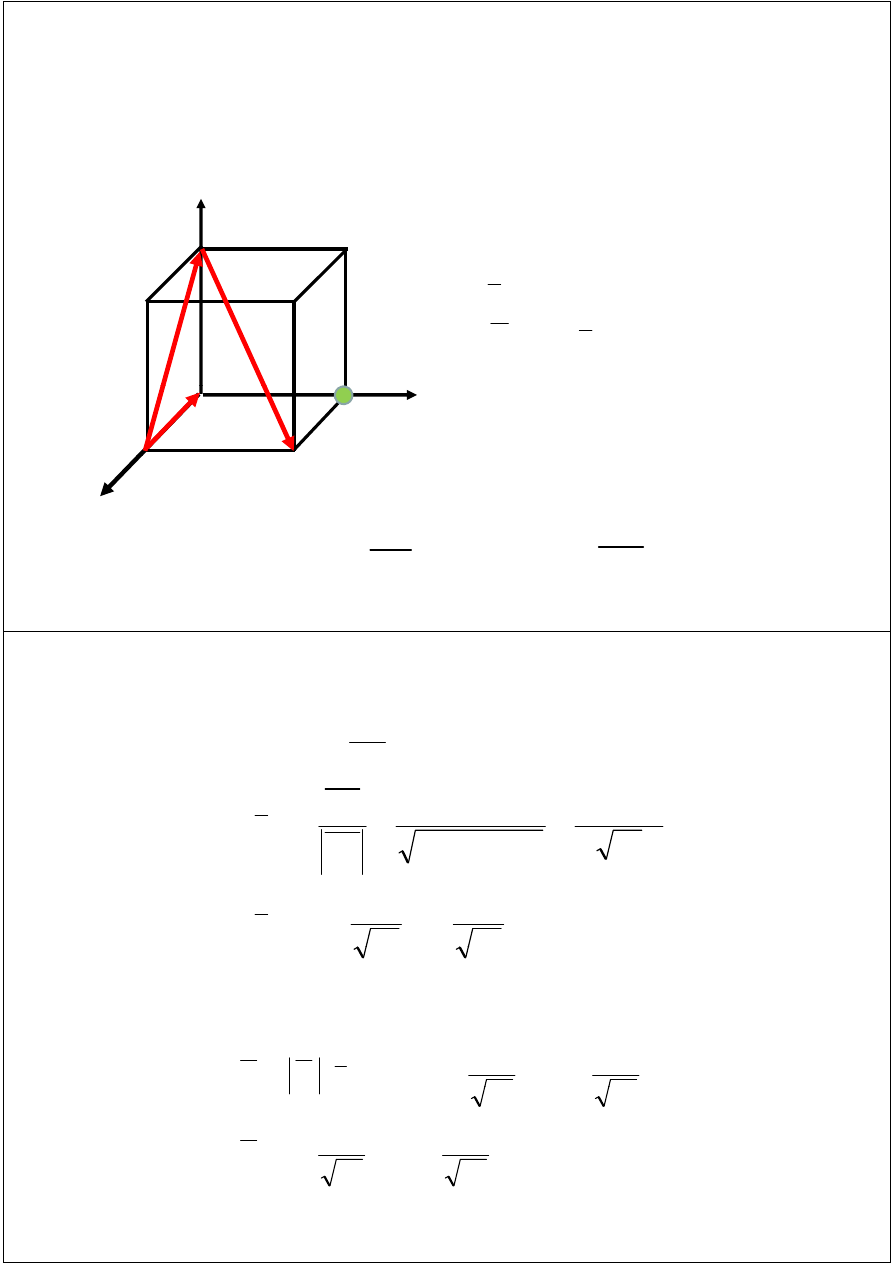
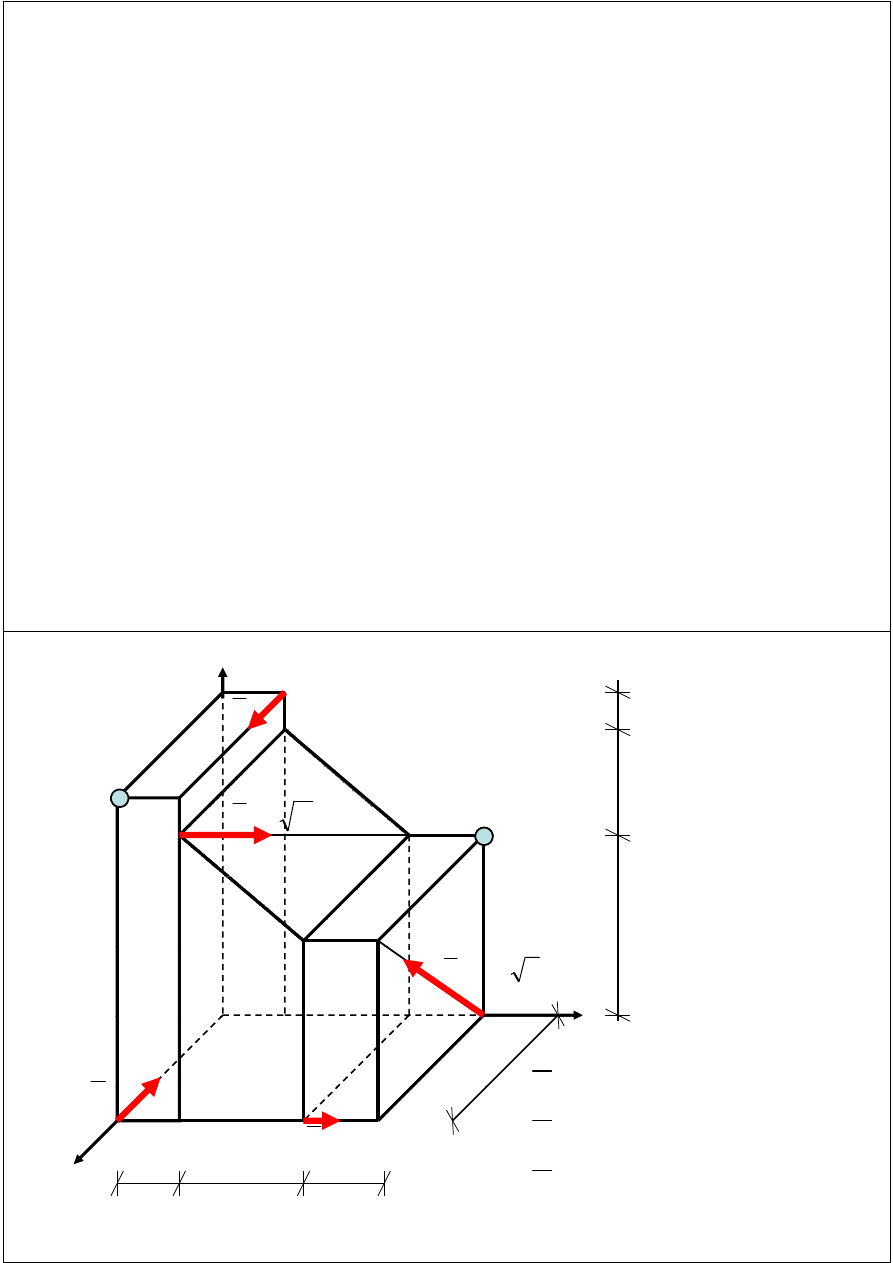
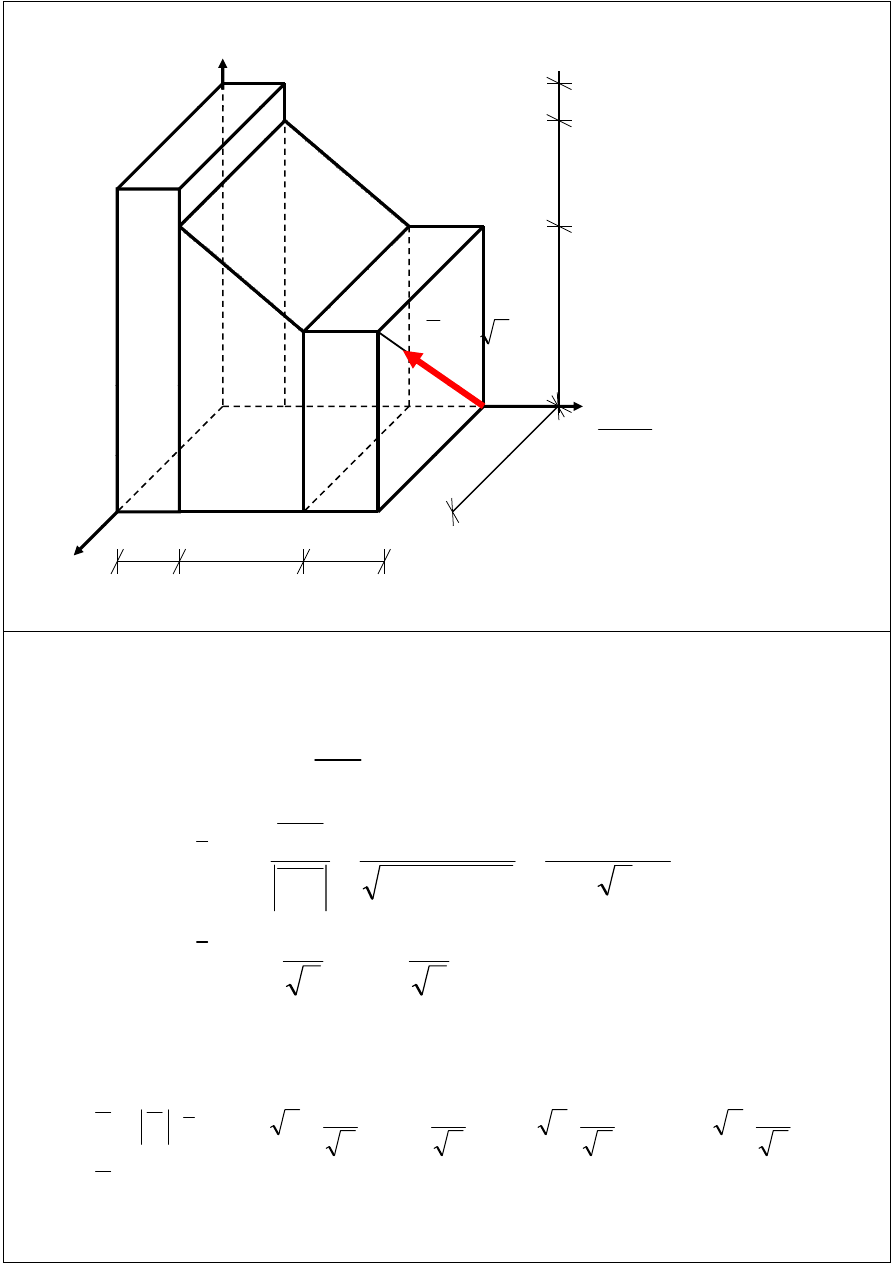
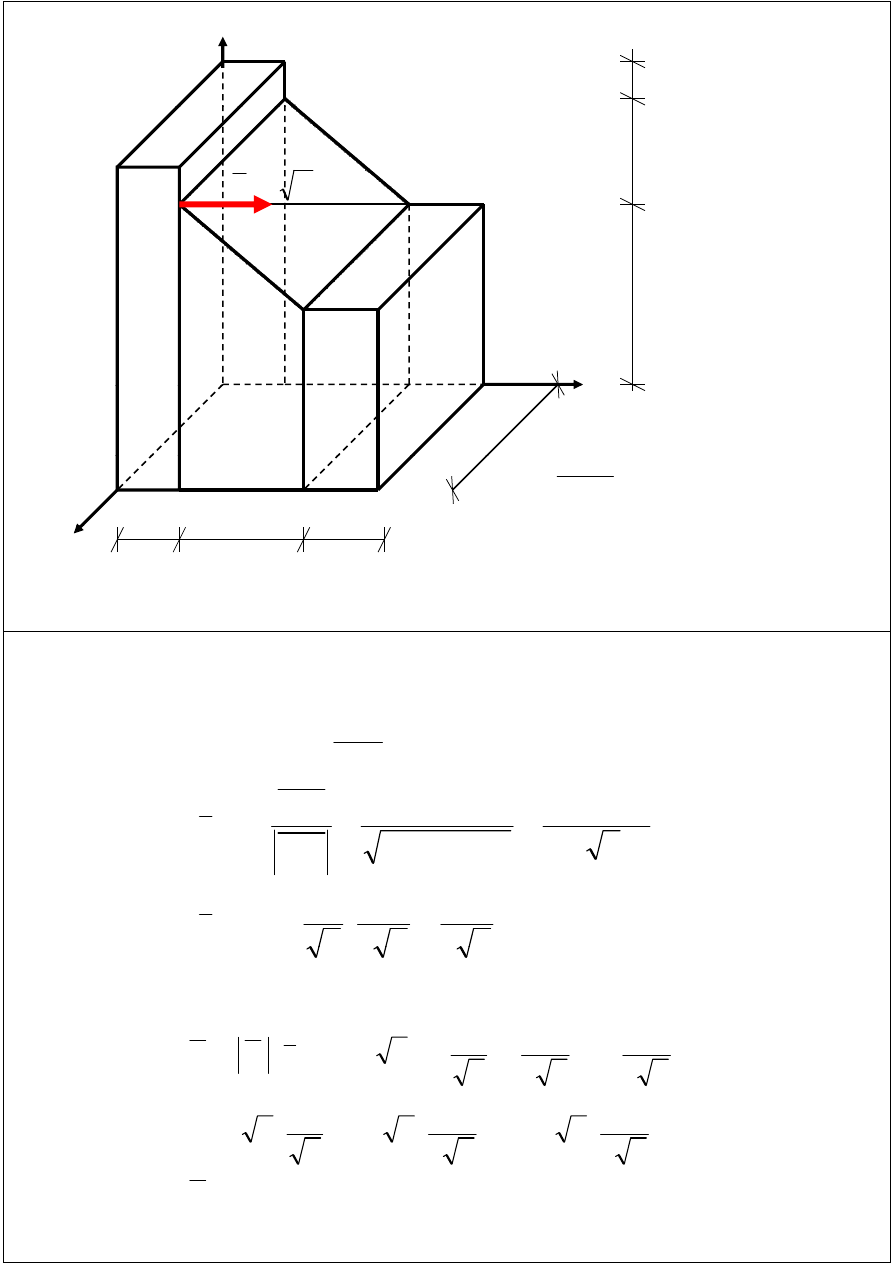
Przykład 1.
a) Oblicz współrzędne wektorów
a) Oblicz współrzędne wektorów
b) Oblicz sumę
c) Oblicz moment względem bieguna A
)
g ę
g
Z
B
4
0
,
0
,
1
e
CO
3
_
F
Y
A
3F
2F
2
_
F
4 m
O
0
,
0
,
1
1
F
e
F
F
CO
X
2F
F
1
_
F
1 m
O
0
0
1
C
4
0
0
B
X
C
D
2 m
4
,
0
,
0
0
,
0
,
1
B
C
0
,
2
,
1
4
,
0
,
0
D
B
4
,
0
,
1
CB
4
,
2
,
1
BD
Wyznaczenie wersora kierunku CB
4
,
0
,
1
CB
4
0
1
4
0
1
CB
17
4
,
0
,
1
4
0
1
4
,
0
,
1
2
2
2
CB
CB
CB
e
17
4
,
0
,
17
1
CB
e
17
17
Wyznaczenie wektora siły F
2
4
,
0
,
1
2
2
2
F
e
F
F
CB
y
y
2
8
0
2
17
,
,
17
2
2
F
F
F
CB
17
,
0
,
17
2
F
Wyznaczenie wersora kierunku CB
4
,
2
,
1
BD
4
2
1
4
2
1
BD
21
4
,
2
,
1
4
2
1
4
,
2
,
1
2
2
2
BD
BD
BD
e
21
4
,
21
2
,
21
1
BD
e
21
21
21
Wyznaczenie wektora siły F
3
4
,
2
,
1
3
3
3
F
e
F
F
BD
y
y
3
12
6
3
21
,
21
,
21
3
3
F
F
F
F
BD
21
,
21
,
21
3
F
Obliczenie sumy
0
,
0
,
2
1
F
F
8
2
F
F
17
8
,
0
,
17
2
2
F
F
F
21
12
,
21
6
,
21
3
3
F
F
F
F
12
8
,
6
,
3
2
2
3
2
1
3
F
F
F
F
F
F
F
F
F
F
S
i
21
17
,
21
,
21
17
3
2
1
1
i
i
A
AC
AC
Wyznaczenie momentu względem punktu A
3
2
1
F
AB
F
AC
F
AC
M
A
F
F
AC
0
0
2
0
2
1
1
4
0
0
0
0
1
0
2
0
B
C
A
F
4
0
0
1
0
2
1
AC
4
,
0
,
0
0
,
0
,
1
0
,
2
,
0
B
C
A
Z
B
17
8
0
17
2
2
F
F
F
_
F
2
_
F
4 m
17
4
17
8
17
16
F
F
F
3
F
Y
A
3F
2F
2
F
O
12
6
3
4
2
0
F
F
F
F
AB
X
C
D
F
1
_
F
2 m
1 m
21
6
21
12
0
21
21
21
3
F
F
F
6
4
4
,
12
8
,
16
F
F
F
F
F
F
M
A
2 m
21
21
661
.
3
,
678
.
0
,
492
.
0
21
17
,
21
17
,
17
F
M
A
A
Twierdzenie o zmianie bieguna
g
Dla układu złożonego z n sił obliczmy moment względem
Dla układu złożonego z n sił obliczmy moment względem
Punktu (bieguna) B i nowego punktu (bieguna) R.
A
n
A
1
A
1
F
n
F
2
A
i
A
2
F
i
F
n
B
R
n
df
B
A
F
M
i
i
i
B
B
A
F
M
1
Twierdzenie o zmianie bieguna
g
n
A
A
1
F
n
df
A
i
A
1
A
2
F
i
F
n
F
n
i
i
i
df
B
B
A
F
M
1
2
A
i 1
n
i
i
R
R
A
F
M
B
R
i 1
BR
B
A
R
A
i
i
n
n
i
i
i
i
B
i
i
i
R
BR
F
M
BR
B
A
F
M
1
1
Twierdzenie o zmianie bieguna
n
i
B
R
BR
F
M
M
g
i
i
B
R
BR
F
M
M
1
Wektor nazywamy sumą układu. Mamy zatem:
n
i
i
df
F
S
1
BR
S
M
M
B
tw
R
BR
S
M
M
B
R
M
t kł d
ił li
l d
bi
j t
Moment układu sił liczony względem bieguna nowego jest
równy momentowi układu względem bieguna starego
powiększonemu o iloczyn wektorowy sumy układu i wektora
powiększonemu o iloczyn wektorowy sumy układu i wektora
łączącego biegun stary z nowym
Wnioski z twierdzenia o zmianie
bieguna
Jeżeli , to moment układu jest stały (niezależny od
wyboru bieguna, względem którego jest liczony).
0
S
y
g
,
g ę
g j
y)
BR
S
M
M
B
R
BR
S
M
M
B
R
0
S
B
R
M
M
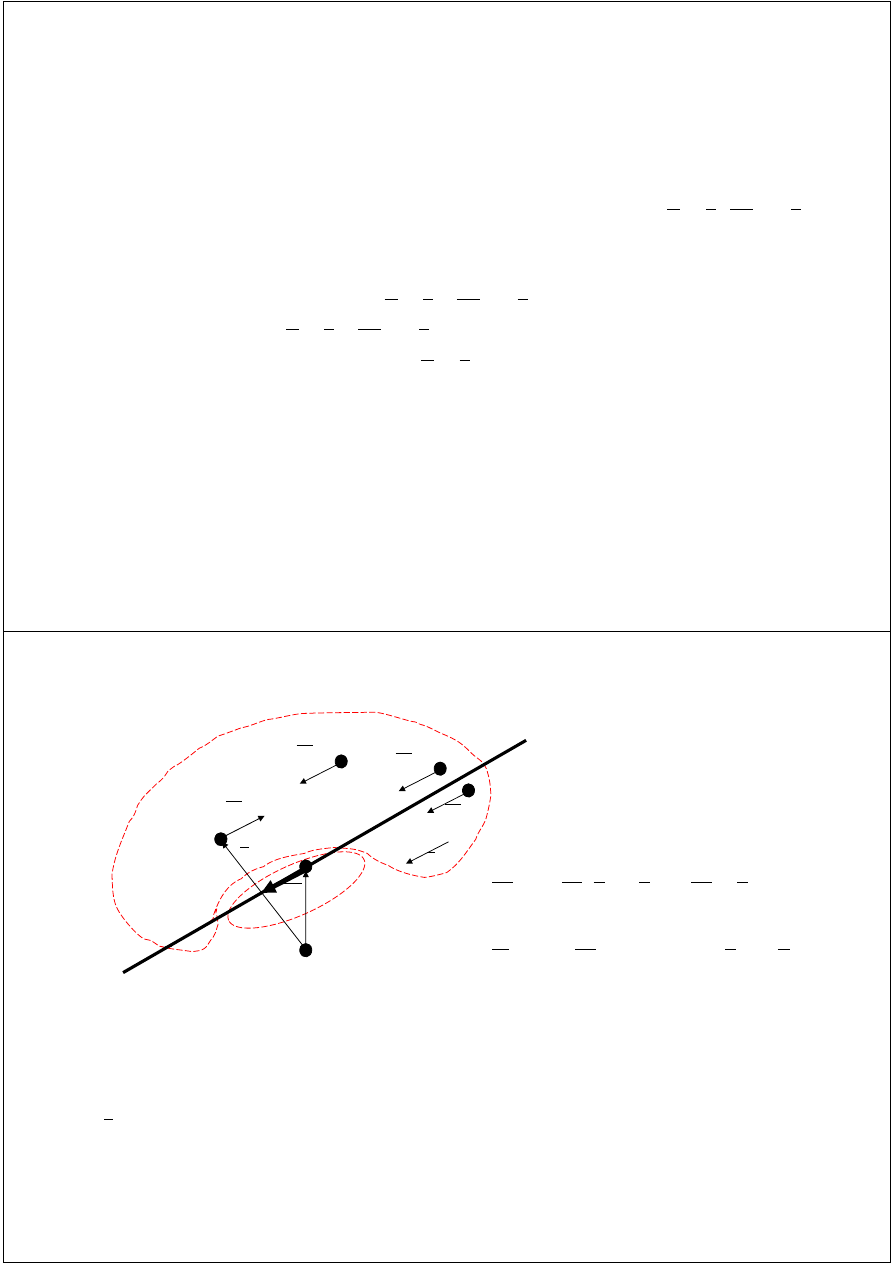
Jeżeli momenty układu liczone względem trzech
y
g ę
niewspółliniowych punktów są równe, to suma układu jest
równa zeru.
Aby wykazać prawdziwość tego wniosku, należy dwukrotnie
Z: punkty A B C są niewspółliniowe:
y y
p
g
,
y
zastosować twierdzenie o zmianie bieguna.
Z: punkty A, B, C są niewspółliniowe:
C
B
A
M
M
M
AC
AB
0
oraz
S
T
0
:
Suma nie może być
równoległa do AB i AC
AB
S
M
M
D
A
B
:
0
S
0
AB
S
równoległa do AB i AC
AC
S
M
M
A
C
0
S
0
AC
S
Il
k l
i
t li
l d
Iloczyn skalarny sumy i momentu liczonego względem
dowolnego punktu jest dla układu sił wielkością stałą
i nazywamy ją parametrem układu:
i nazywamy ją parametrem układu:
const
S
M
S
M
k
A
df
0
D :
S
M
OA
S
S
S
M
S
OA
S
M
S
M
A
0
0
0
Przekształcenia elementarne
Przekształcenie elementarne I rodzaju- dodanie (lub odjęcie)
do układu sił dwóch sił przeciwnych leżących na jednej prostej
do układu sił dwóch sił przeciwnych, leżących na jednej prostej.
z
F
1
F
F
1
A
y
F
i
F
1
A
i
A
x
F
n
F
n
A
n
Przekształcenia elementarne
Przekształcenie elementarne II rodzaju- dodanie (lub odjęcie)
zbieżnego układu sił o sumie równej zeru
zbieżnego układu sił o sumie równej zeru.
1
F
A
i
F
1
A
A
i
N
z
F
n
A
i
A
A
1
N
k
N
x
y
n
F
k
0
1
k
i
i
N
S
1
i
Równoważność układu sił
Równoważność układu sił
Dwa układy sił nazywamy równoważnymi, jeżeli wykonując
j d
i h k ń
il ść
k t ł ń l
t
h
na jednym z nich skończoną ilość przekształceń elementarnych
I i II rodzaju otrzymamy drugi układ. Z definicji przekształceń
elementarnych wynika że nie zmieniają one sumy i momentu
elementarnych wynika, że nie zmieniają one sumy i momentu
układu.
n
i
F
F
F
F
A
2
1
,
...
,
,
...
,
,
Zatem równoważne układy sił A i B
k
j
n
i
R
R
R
R
A
A
A
A
A
2
1
2
1
,
...
,
,
...
,
,
Zatem równoważne układy sił A i B
to takie, które mają równe sumy
i równe momenty liczone względem
k
j
k
j
B
B
B
B
R
R
R
R
B
2
1
2
1
,
...
,
,
...
,
,
dowolnego (każdego) punktu.
)
(
)
(
B
M
A
M
S
S
B
A
df
)
(
)
(
B
M
A
M
Q
Q
Q- dowolny punkt
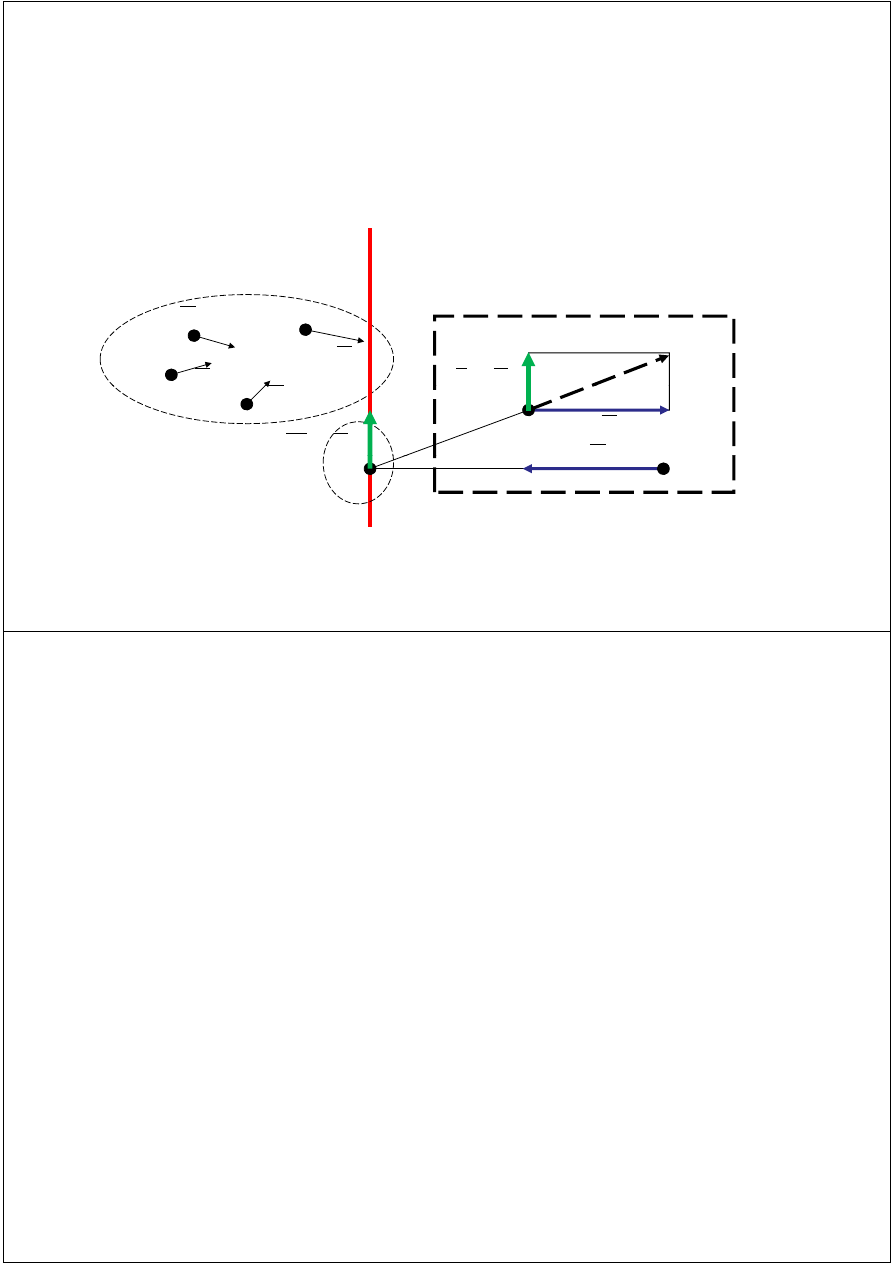
Twierdzenia o równoważności
kł dó
ił
układów sił:
1 Dwa układy sił A i B są równoważne gdy mają równe sumy
1. Dwa układy sił A i B są równoważne, gdy mają równe sumy
i równe momenty liczone względem jednego (ustalonego) punktu.
:
S
S
Z
B
A
:
,
:
B
A
T
punkt
ustalony
O
B
M
A
M
S
S
O
O
B
A
'
:
:
O
D
B
A
T
dowolny punkt
Należy wykazać że
B
M
A
M
Należy wykazać, że
B
M
A
M
O
O
'
'
OO
S
A
M
A
M
A
O
O
'
'
'
Stąd po odjęciu stronami
B
M
A
M
B
M
A
M
OO
S
B
M
B
M
OO
S
A
M
A
M
B
O
O
A
O
O
'
'
l b
0
'
Stąd po odjęciu stronami
otrzymujemy
B
M
A
M
B
M
A
M
O
O
O
O
'
'
'
'
lub
0
2. Dwa układy sił A i B są równoważne, gdy mają (odpowiednio)
równe momenty liczone względem trzech niewspółliniowych
równe momenty liczone względem trzech niewspółliniowych
punktów.
Z: O O’ O’’ punkty niewspółliniowe
Z: O, O , O – punkty niewspółliniowe
B
M
A
M
O
O
B
M
A
M
B
M
A
M
O
O
O
O
''
''
'
'
B
A
bieguna
zmianie
o
e
twierdzeni
my
wykorzysta
dowodzie
w
D
B
A
czyli
S
S
T
:
:
:
B
O
O
A
O
O
B
O
O
A
O
O
OO
S
B
M
B
M
OO
S
A
M
A
M
OO
S
B
M
B
M
OO
S
A
M
A
M
''
''
'
'
''
''
'
'
B
A
B
A
OO
S
S
OO
S
S
0
''
0
'
Na postawie założenia można napisać:
B
A
B
A
S
S
czyli
S
S
0
''
'
OO
do
równoległ
jest
nie
OO
wektor
Ponieważ
Zerowy układ sił
y
Układ sił, dla którego suma jest wektorem zerowym i moment
li
l d
d
l
kt
ó
i
liczony względem dowolnego punktu równa się zeru,
nazywamy zerowym układem sił:
F
0
0
O
M
S
F
Jako przykład takiego układu można podać układ złożony
z dwu sił przeciwnych leżących na jednej prostej lub układ
z dwu sił przeciwnych leżących na jednej prostej lub układ
zbieżnych sił o sumie równej zeru.
Para sił
Parę sił stanowią dwie siły niezerowe, przeciwne,
nie leżące na jednej prostej.
ą
j
j p
j
Z definicji pary sił wynika, że jej suma jest równa zeru,
ś
li
l d
d
l
k j
ł
zaś moment liczony względem dowolnego punktu jest stały:
0
0
O
M
S
M
O
M
.
A
F
B
F
F
0
d
B
Płaszczyznę wyznaczoną przez parę sił nazywamy
płaszczyzną działania pary:
AB
F
M
M
B
O
d
F
AB
F
M
M
O
O
sin
kierunek
moduł
AB
F
M
M
B
O
zwrot wektory stanowią
trójkę prawoskrętną
AB
F
M
O
,
,
Pary sił leżące w jednej płaszczyźnie i mające ten sam moment
stanowią zbiór równoważnych par A zatem parę sił można
stanowią zbiór równoważnych par. A zatem parę sił można
dowolnie przesuwać, obracać w płaszczyźnie jej działania.
F
F
F
F
F
F
Redukcja układu sił - redukcja w punkcie
Redukcja układu sił redukcja w punkcie
Przez redukcję rozumieć będziemy przekształcenie
polegające na zastąpieniu danego układu układem
równoważnym
równoważnym.
Redukcja układu sił w punkcie R (biegunie) polega na
Redukcja układu sił w punkcie R (biegunie) polega na
zastąpieniu danego układu układem równoważnym, złożonym
z wektora równego sumie układu (gdy ) zaczepionego
0
S
w biegunie redukcji i pary sił o momencie równym momentowi
układu liczonego względem bieguna redukcji (gdy ).
0
R
M
Mogą tutaj wystąpić następujące przypadki:
1) kł d
)
0
0
(S
)
0
0
(
R
M
S
S
b
1) układ zerowy
2) para sił
3) układ złożony z jednego wektora
),
0
0
(
R
M
S
),
0
0
(
R
M
S
)
0
0
(
R
M
S
S
b
3) układ złożony z jednego wektora
4) układ złożony z trzech wektorów
n
A
1
F
A
S
b
i
A
n
1
A
1
F
2
F
i
F
n
F
R
M
F
R
B
F
A
2
A
B
B
B
A
Redukcja układu sił - redukcja do
Redukcja układu sił redukcja do
najprostszej postaci
Przez redukcję rozumieć będziemy przekształcenie
Przez redukcję rozumieć będziemy przekształcenie
polegające na zastąpieniu danego układu równoważnym,
możliwie prostszym (złożonym z mniejszej liczby sił).
Układ sił, którego suma jest równa zeru, redukuje się do
kład
ero ego gd jego moment jest ero
a do par
układu zerowego, gdy jego moment jest zerowy, a do pary
sił, gdy ma moment niezerowy.
Układ sił równoważny danemu układowi, a złożony
y
,
y
z najmniejszej liczby sił, nazywamy
najprostszym układem
sił
. Jest nim:
1. Układ zerowy, gdy
2. para sił, gdy
3 wypadkowa układu sił gdy
,
0
0
O
M
S
,
0
0
O
M
S
0
0
K
S
3. wypadkowa układu sił, gdy
4. układ złożony z dwu sił skośnych, gdy
,
0
0
K
S
.
0
K
Układy te wzajemnie się wykluczają.
Wypadkowa układu
yp
Układ równoważny danemu układowi, złożony z jednej
niezerowej siły równej sumie układu.
Ma ściśle określoną prostą działania o tej własności, że
moment układu liczony względem jej punktów jest równy zeru
moment układu liczony względem jej punktów jest równy zeru,
zaś liczony względem punktów nie należących do tej prostej-
różny od zerai prostopadły do sumy układu.
y
p
p
y
y
Układ sił o sumie niezerowej i parametrze układu równym
d k j
i d
dk
j (
kt h l ż
h
zeru redukuje się do wypadkowej (w punktach leżących na
prostej działania wypadkowej), zaś w punktach poza prostą,
na której leży wypadkowa otrzymujemy układ równoważny
na której leży wypadkowa, otrzymujemy układ równoważny,
złożony z trzech sił leżących w jednej płaszczyźnie.
L
t d i ł i
dk
j
A
F
L- prosta działania wypadkowej
A
A
n
A
1
A
1
F
2
F
n
F
D
A
S
b
A
2
A
i
A
2
i
F
F
F
B
A
S
W
A
S
b
F
A
B
C
D
B
A
Różnica między sumą sił a
wypadkową
Suma jest to wektor swobodny (nie ma ustalonego punktu
zaczepienia), który może być wektorem zerowym.
Wypadkowa, jako układ równoważny danemu, jest wektorem
niezerowym o ściśle określonej prostej działania
niezerowym, o ściśle określonej prostej działania.
Suma nie może być równoważna układowi sił, gdyż nie jest
y
g y
j
układem.
2
/
10kN
2
/
10
m
kN
25
kN
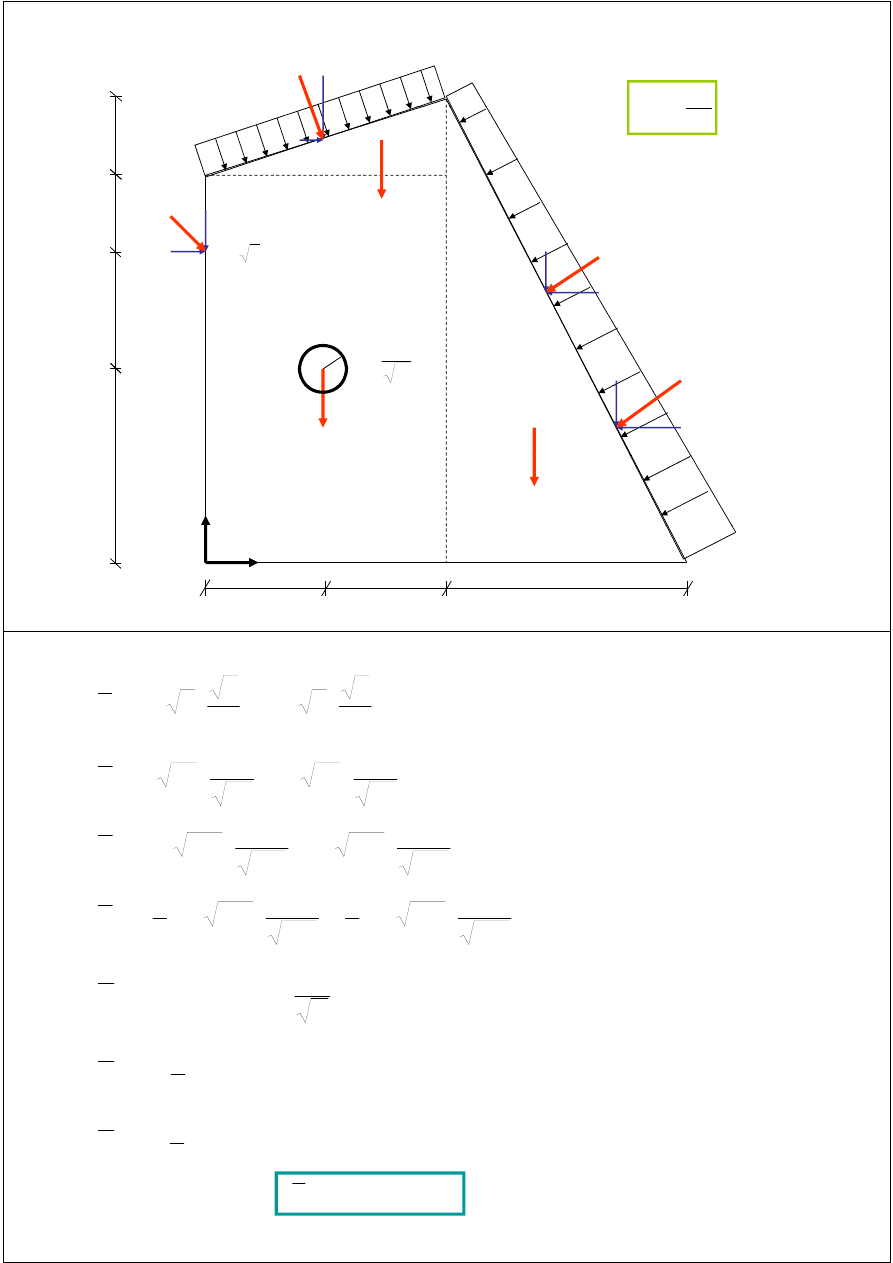
Zredukować podany układ sił do najprostszej postaci.
2
2
/
10
m
kN
/
10
m
kN
2
P
3
G
3
25
m
2
1
P
P
45
3
3
P
45
2
100
3
4
R
4
P
2
G
1
G
5
y
2
3
3
6
x
y
2
/
30
m
kN
0
,
100
,
100
0
,
2
2
2
100
,
2
2
2
100
1
P
0
,
60
,
20
0
,
40
6
40
10
,
40
2
40
10
2
P
0
,
60
,
120
0
,
180
6
180
10
,
180
2
180
10
3
P
0
,
60
,
120
0
,
180
6
180
20
2
1
,
180
12
180
20
2
1
4
P
0
,
1100
,
0
25
4
10
6
,
0
,
0
2
1
G
0
,
900
,
0
0
,
25
12
6
2
1
,
0
2
G
0
,
150
,
0
0
,
25
2
6
2
1
,
0
2
3
G
0
,
2430
,
120
2
S
0
,
100
,
100
1
P
0
,
8
,
0
1
A
0
,
60
,
20
0
,
100
,
100
2
1
P
P
0
,
11
,
3
0
,
8
,
0
2
1
A
A
0
,
60
,
120
3
P
0
,
6
,
9
3
A
0
1100
0
0
,
60
,
120
4
G
P
0
5
3
0
,
4
,
10
4
A
A
0
900
0
0
,
1100
,
0
1
G
G
0
4
8
0
,
5
,
3
5
A
A
0
,
150
,
0
0
,
900
,
0
3
2
G
G
2
0
,
4
,
8
6
A
0
,
150
,
0
3
G
0
,
3
2
10
,
4
7
A
0
,
8
,
0
1
O
A
800
,
0
,
0
0
,
100
,
100
1
1
1
F
O
A
P
800
,
0
,
0
1
1
F
O
A
0
,
60
,
20
0
,
11
,
3
2
2
P
O
A
400
,
0
,
0
2
2
F
O
A
0
,
60
,
120
0
,
6
,
9
3
3
P
O
A
180
,
0
,
0
3
3
F
O
A
0
,
4
,
10
4
O
A
120
,
0
,
0
0
,
60
,
120
4
4
4
F
O
A
P
0
5
3
O
A
2
0
,
1100
,
0
0
,
5
,
3
5
5
P
O
A
0
150
0
0
,
3
2
10
,
4
7
P
O
A
0
4
8
O
A
3300
,
0
,
0
5
5
F
O
A
600
,
0
,
0
0
,
150
,
0
7
7
7
F
O
A
P
0
,
900
,
0
0
,
4
,
8
6
6
P
O
A
7200
,
0
,
0
6
6
F
O
A
12240
0
0
O
M
12240
4
150
8
900
3
1100
4
120
10
60
6
120
9
60
3
60
11
20
8
100
O
M
12240
4
150
8
900
3
1100
4
120
10
60
Układ redukuje się po wypadkowej
0
0
S
S
M
k
O
Wyznaczenie prostej działanie wypadkowej (osi środkowej)
K
t
t
i
i bi
i
k j
t ki
S
0
,
2430
,
120
Korzystamy z tw. o zmianie bieguna i poszukujemy takiego
punktu X(x,y,0) aby Mx = 0
x
y
y
x
OX
2430
120
,
0
,
0
0
,
,
OX
S
M
M
O
X
x
y 2430
120
,
0
,
0
0
0
0
12240
2430
120
12240
0
x
y
0
0
0
0
0
0
12240
102
120
12240
0
y
x
x
y 2430
120
12240
0
04
,
5
2430
12240
0
x
y
Oś środkowa układu sił, skrętnik
Jest to miejsce geometryczne punktów o tej własności,
że moment układu liczony względem tych punktów jest
że moment układu liczony względem tych punktów jest
równy zeru (K=0), lub jest równoległy do sumy układu
Punkty osi środkowej mają jeszcze jedną własność wynikającą
.
0
K
Punkty osi środkowej mają jeszcze jedną własność wynikającą
z parametru układu:
const
M
S
M
S
M
S
k
A
A
A
cos
const
M
S
M
S
M
S
k
A
A
A
,
cos
Stąd otrzymujemy:
k
S
k
0
0
min
,
cos
A
A
M
S
S
k
M
gdy
S
M
k
S
k
A
||
0
0
0
A zatem mamy:
k
S
S
S
k
S
S
M
M
A
A
2
S
S
K
S
S
M
M
A
A
2
S
S
2
Własność tę można ująć następująco:
Moduł momentu (układu sił o ) liczonego względem
punktów osi środkowej jest minimalny.
0
S
A
F
i
A
n
A
1
A
1
F
2
F
i
F
n
F
A
oś środkowa
A
2
A
O (stały punkt odniesienia)
A
S
0
A
A
A
S
M
M
||
0
Znajdujemy punkty, które należą do osi środkowej, a więc
jej równanie. Do równania osi środkowej możemy również
dojść z definicji. Z twierdzenia o zmianie do bieguna mamy:
0
0
0
K
gdy
S
K
gdy
OA
S
M
M
O
A
Mnożymy wektorowo wektory
:
S
i
M
A
S
OA
S
S
M
S
M
O
A
0
Powyższe wyrażenie zapisujemy następująco:
S
OA
S
OA
S
S
M
O
2
0
Powyższe wyrażenie zapisujemy następująco:
S
OA
S
S
M
OA
O
Stąd otrzymamy:
OA
S
S
S
S
OA
O
2
2
gdzie
2
S
O
S
0
k
S
M
A
||
i
A
n
A
1
A
1
F
F
F
n
F
S
M
A
||
A
2
A
i
2
F
i
F
F
S
b
A
F
F
oś środkowa
B- skrętnik
A
ę
W przypadku układu o parametrze wprowadza się
0
k
pojęcie skrętnika, to jest układu zredukowanego w dowolnym
punkcie osi środkowej. Układ taki składa się z wektora
l ż
i ś dk
j i
ił
i
ó
l
ł
S
b
leżącego na osi środkowej i pary sił o momencie równoległym
do sumy układu.
PRZYKŁAD
Dla podanego układu sił obliczyć:
PRZYKŁAD
Dla podanego układu sił obliczyć:
- sumę układu,
moment układu sił względem punktu A (z definicji)
- moment układu sił względem punktu A (z definicji)
- moment układu sił względem punktu B (z definicji
oraz z twierdzenia o zmianie bieguna)
oraz z twierdzenia o zmianie bieguna).
Zredukować podany układ do najprostszej postaci
Zredukować podany układ do najprostszej postaci.
z
5
F
10kN
5
A
1
9
,
0
,
5
A
G
3
5
,
7
,
0
,
,
B
A
4
F
kN
2
30
4
A
F
B
0
5
5
0
,
0
,
5
1
A
A
A
E
5
0
,
7
,
0
0
,
5
,
5
3
2
A
A
y
3
F
kN
2
25
3
A
9
1
0
8
,
1
,
5
4
A
A
20kN
5
C
9
,
1
,
0
5
A
F
0
0
20
F
1
A
2
F
15kN
2
A
D
1
F
0
,
15
,
0
0
,
0
,
20
2
1
F
F
x
4
1
2
0
,
0
,
10
5
F
z
11
33
A
E
5
5
7
5
0
,
7
,
0
3
E
A
3
F
kN
2
25
E
5
5
,
7
,
5
E
y
5
5
0
5
E
A
A
3
5
5
,
0
,
5
3
E
A
x
4
1
2
Wyznaczenie wersora kierunku A
3
E
5
,
0
,
5
3
E
A
y
3
2
5
5
,
0
,
5
5
,
0
,
5
3
2
2
2
3
E
A
E
A
E
A
e
1
1
2
5
5
0
5
2
2
2
3
E
A
2
1
,
0
,
2
1
3
E
A
e
Wyznaczenie wektora siły F
3
2
1
2
25
,
0
,
2
1
2
25
2
1
,
0
,
2
1
2
25
3
3
3
e
F
F
E
A
25
,
0
,
25
3
F
z
1
3
A
4
F
kN
2
30
F
B
8
,
1
,
5
4
A
A
A
4
5
5
,
5
,
0
F
yy
5
4
1
2
3
,
4
,
5
4
F
A
x
4
1
2
Wyznaczenie wersora kierunku A
4
F
3
,
4
,
5
4
F
A
3
4
5
3
4
5
F
A
2
5
3
,
4
,
5
3
4
5
3
,
4
,
5
4
2
2
2
4
4
F
A
F
A
F
A
e
2
5
3
,
2
5
4
,
2
1
4
F
A
e
2
5
2
5
2
Wyznaczenie wektora siły F
4
2
5
3
,
2
5
4
,
2
1
2
30
4
4
4
e
F
F
F
A
y
y
4
2
5
3
2
30
,
2
5
4
2
30
,
2
1
2
30
18
,
24
,
30
2
5
2
5
2
4
F
Wyznaczenie sumy układu
5
i
F
S
y
y
0
,
0
,
20
1
F
1
i
25
0
25
0
,
15
,
0
2
F
F
18
,
24
,
30
25
,
0
,
25
4
3
F
F
0
,
0
,
10
5
F
7
,
39
,
15
S
Wyznaczenie momentu względem punktu A
5
5
4
4
3
3
2
2
1
1
5
F
AA
F
AA
F
AA
F
AA
F
AA
F
AA
M
i
i
A
y
g ę
1
i
9
,
1
,
0
8
,
1
,
5
0
,
7
,
0
0
,
5
,
5
0
,
0
,
5
9
,
0
,
5
5
4
3
2
1
A
A
A
A
A
A
9
;
0
;
0
AA
1
9
;
5
;
0
AA
9
7
5
AA
0
;
180
;
0
0
;
0
;
20
F
9
;
0
;
0
AA
1
1
0
;
0
;
135
0
;
15
;
0
F
9
;
5
;
0
AA
2
2
175
;
100
;
175
25
;
0
;
25
F
9
;
7
;
5
AA
3
3
0
;
0
;
135
18
24
30
F
1
;
1
;
0
AA
4
175
;
100
;
175
0
0
10
F
0
;
1
;
5
AA
5
30
;
30
;
6
18
;
24
;
30
F
4
10
;
0
;
0
0
;
0
;
10
F
5
155
,
110
,
316
A
M
Wyznaczenie momentu względem punktu B
5
5
4
4
3
3
2
2
1
1
5
F
BA
F
BA
F
BA
F
BA
F
BA
F
BA
M
i
i
B
y
g ę
5
5
4
4
3
3
2
2
1
1
1
i
i
i
B
9
1
0
8
1
5
0
7
0
0
5
5
0
0
5
5
7
0
5
4
3
2
1
A
A
A
A
A
B
0
0
20
F
5
;
7
;
5
BA
1
0
15
0
F
5
;
2
;
5
BA
2
25
;
0
;
25
F
5
;
0
;
0
BA
3
9
,
1
,
0
8
,
1
,
5
0
,
7
,
0
0
,
5
,
5
0
,
0
,
5
5
,
7
,
0
5
4
3
2
1
A
A
A
A
A
B
140
;
100
;
0
0
;
0
;
20
F
1
75
;
0
;
75
0
;
15
;
0
F
2
0
;
125
;
0
25
;
0
;
25
F
3
60
0
36
18
;
24
;
30
F
3
;
6
;
5
BA
4
4
60
40
0
0
;
0
;
10
F
4
;
6
;
0
BA
5
5
60
;
0
;
36
60
;
40
;
0
65
15
111
M
65
,
15
,
111
B
M
Wyznaczenie momentu względem
tw
punktu B z twierdzenia o zmianie bieguna
.
AB
S
M
M
A
tw
B
4
,
7
,
5
7
,
39
,
15
AB
S
90
,
95
,
205
AB
S
155
110
316
A
M
65
,
15
,
111
B
M
Wyznaczenie parametru układu
y
p
0
1535
7
155
39
110
15
316
7
;
39
;
15
155
;
110
;
316
S
M
k
A
Równanie osi środkowej
Redukcja do skrętnika
A
r
S
S
M
r
j
A
2
r
S
S
r
7
;
39
;
15
155
;
110
;
316
S
M
A
13974
;
113
;
6815
1795
7
39
15
S
2
2
2
2
785
,
7
;
063
,
0
;
797
,
3
S
M
2
A
7
;
39
;
15
S
S
2
9
;
0
;
5
r
;
;
A
39
063
,
0
0
39
063
,
0
y
15
203
,
1
5
15
797
,
3
x
l:
7
215
,
1
9
7
785
,
7
z
środkowej
osi
l
prostej
R
pkt
)
(
215
,
1
;
063
,
0
;
203
,
1
.
AR
S
M
M
A
R
AR
S
M
M
A
R
785
7
;
063
0
;
797
3
7
;
39
;
15
AR
S
9
;
0
;
5
215
,
1
;
063
,
0
;
203
,
1
A
R
014
,
149
;
354
,
143
;
174
,
303
785
,
7
;
063
,
0
;
797
,
3
AR
785
,
7
;
063
,
0
;
797
,
3
AR
014
149
354
143
174
303
155
110
316
AR
S
M
972
,
5
;
354
.
33
;
826
,
12
014
,
149
;
354
,
143
;
174
,
303
155
;
110
;
316
AR
S
M
A
Sprawdzenie
||
?
?
S
M
R
972
,
5
;
354
,
33
;
826
,
12
M
O
S
M
R
R
096
0
;
202
0
;
57
0
7
;
39
;
15
,
;
,
;
,
S
R
096
,
0
;
202
,
0
;
57
,
0
0
0
0
Odpowiedź:
Podany układ sił redukuje się do skrętnika złożonego z
wektora sumy
O
7
;
39
;
15
S
15
203
,
1
x
l
;
;
leżącego na osi środkowej
7
215
,
1
39
063
,
0
z
y
l:
i pary sił o momencie
równoległym do wektora sumy
972
,
5
;
354
,
33
;
826
,
12
M
R
S
równoległym do wektora sumy
S
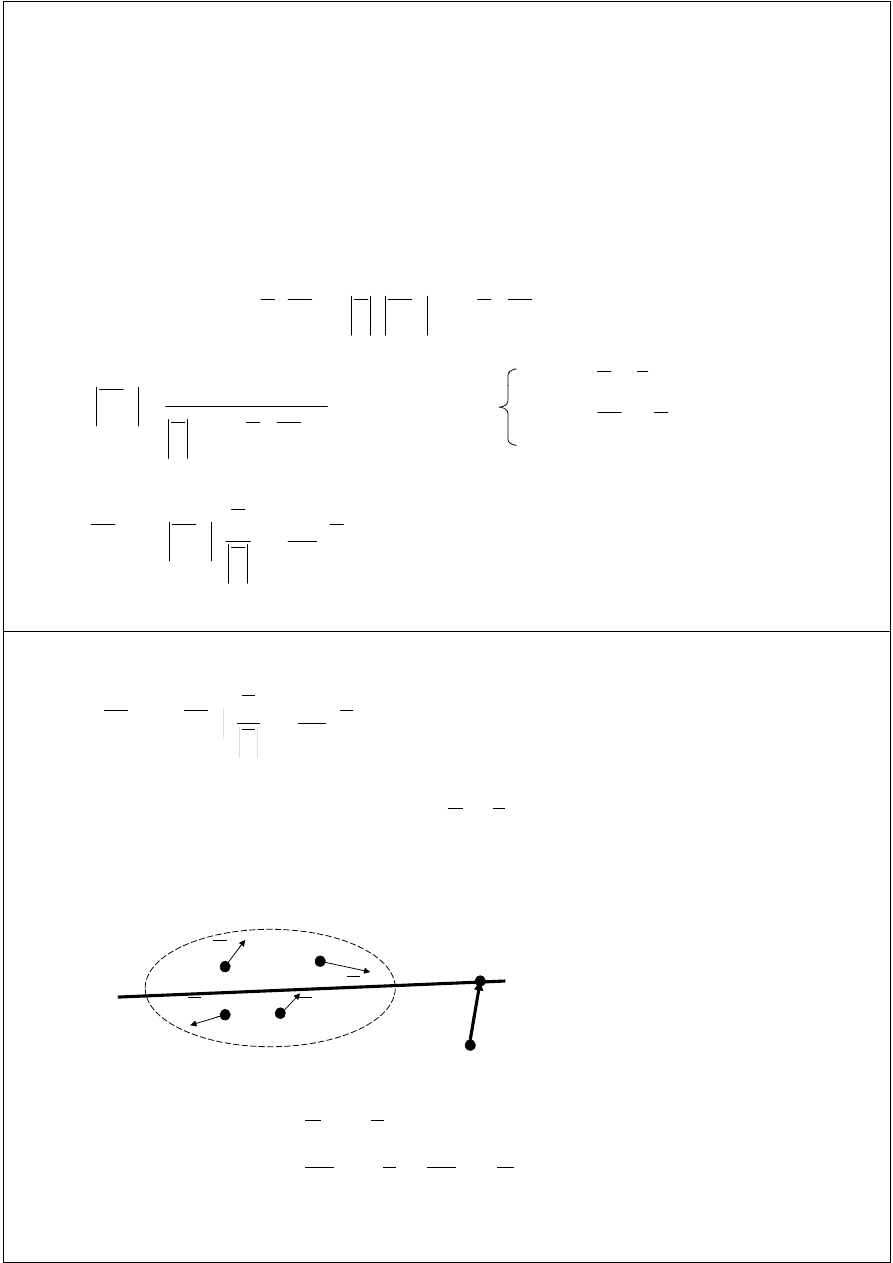
Równoległy układ sił,
ś d k ó
l
ł
kł d
ił
środek równoległego układu sił
Układ sił, w którym siły są równoległe do stałego kierunku,
nazywamy równoległym układem sił. Parametr takiego układu
jest zawsze równy zeru, co wynika z faktu, że przy
moment jest prostopadły do sumy A zatem równoległy układ sił
0
0
A
M
i
S
moment jest prostopadły do sumy. A zatem równoległy układ sił
redukuje się do:
1. układu zerowego, gdy
,
0
0
A
M
S
1. układu zerowego, gdy
2. pary sił, gdy
3. wypadkowej układu, gdy
,
0
0
A
M
S
,
0
0
A
M
S
.
0
S
A
A
prosta działania
2
A
n
A
1
A
1
F
2
F
F
F
prosta działania
wypadkowej
A
i
A
i
F
n
F
L
e
i
r
*
O
W
B
O
n
n
l
i
l
l
i
i
e
F
e
e
F
F
B
O
0
1
1
l
i
i
i
i
e
F
F
S
O- stały punkt odniesienia
- wersor osi l
L
e
0
*
*
1
1
*
OO
F
O
A
F
OO
S
M
M
n
i
i
i
n
i
i
O
O
0
*
1
1
OO
e
F
r
e
F
n
n
l
n
i
i
i
l
n
i
i
0
*
1
1
OO
F
r
F
e
n
i
n
i
i
i
i
l
Z tego związku wynika że wektor
*
OO
F
r
F
n
n
i
Z tego związku wynika, że wektor
jest równoległy do prostej l, co można zapisać następująco
:
1
1
OO
F
r
F
i
i
i
i
i
n
n
*
1
1
e
OO
F
r
F
l
n
i
n
i
i
i
i
(równanie prostej l),
lub jest równy zeru:
0
*
1
1
OO
F
r
F
n
i
n
i
i
i
i
lub jest równy zeru:
(nie zależy od kierunku l).
Stąd mamy:
n
i
i
r
F
n
i
i
i
F
OO
1
1
*
Wektor określa położenie punktu zwanego środkiem
równoległego układu sił. Środek ten ma następujące właściwości:
układ posiadający środek redukuje się w tym punkcie
*
OO
- układ posiadający środek redukuje się w tym punkcie
do wypadkowej,
- moment układu względem środka jest równy zeru,
o e t u adu
g ęde
ś od a jest ó
y e u,
- jeżeli w równoległym układzie sił posiadającym środek obrócimy
siły wokół punktów ich zaczepienia o ten sam kąt, to środek
układu nie zmieni swojego położenia.
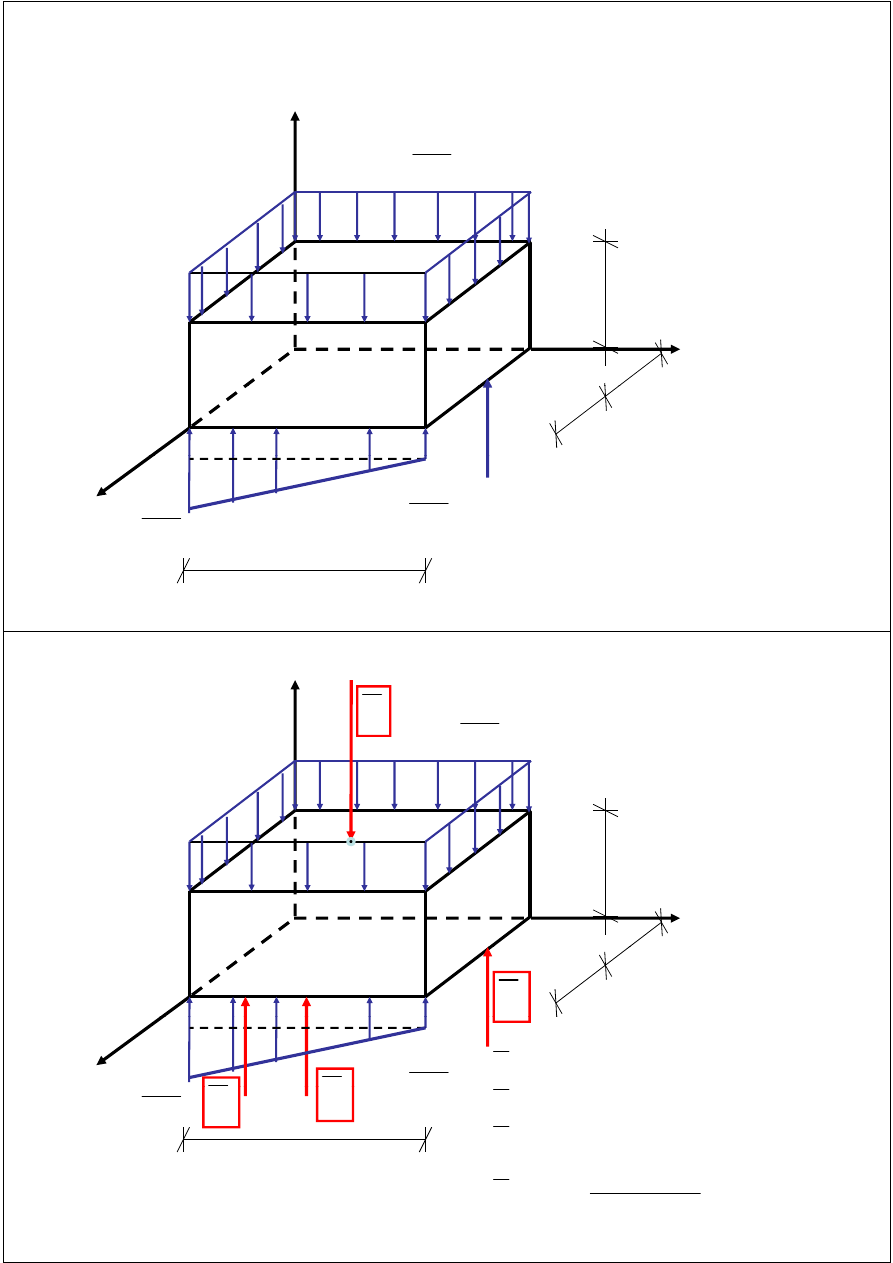
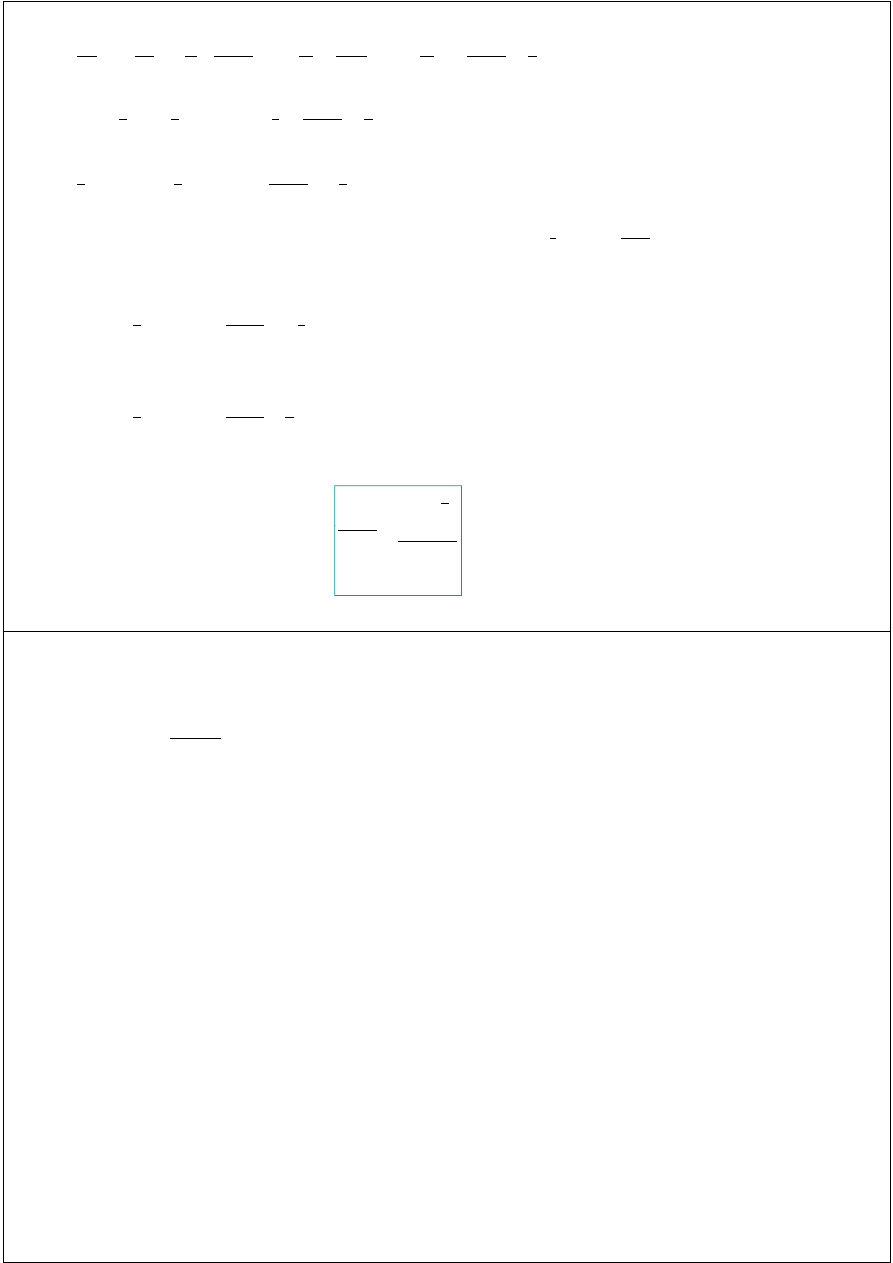
PRZYKŁAD: Wyznaczyć położenie środka zadanego układu
wektorów równoległych
z
2
20
m
kN
m
3
O
y
2
2
x
kN
200
kN
30
mb
kN
10
6
mb
30
mb
1
P
z
3
,
3
,
2
A
1
2
20
kN
0
3
4
A
0
,
6
,
2
A
2
2
m
1
A
3
0
,
2
,
4
A
0
,
3
,
4
A
4
3
O
2
A
1
y
2
kN
200
2
P
3
A
2
4
A
2
kN
200
P
x
b
kN
10
480
,
0
,
0
4
6
20
,
0
,
0
1
P
kN
30
3
P
4
P
6
mb
6
10
,
0
,
0
200
,
0
,
0
3
2
P
P
mb
30
60
,
0
,
0
2
6
10
30
,
0
,
0
4
P
,
4
,
3
,
2
,
1
P
P
P
P
F
4
3
2
1
A
,
A
,
A
,
A
3
,
3
,
2
A
1
480
,
0
,
0
4
6
20
,
0
,
0
1
P
0
3
4
A
0
,
6
,
2
A
3
,
3
,
2
A
2
1
6
10
0
0
200
,
0
,
0
,
,
,
,
2
1
P
P
0
,
2
,
4
A
0
,
3
,
4
A
4
3
60
,
0
,
0
6
10
30
,
0
,
0
6
10
,
0
,
0
4
3
P
P
4
60
,
0
,
0
2
,
0
,
0
4
P
0
160
0
0
P
S
4
:
A
O
r
0
160
,
0
,
0
P
S
i
i
i
1
i
3
,
3
,
2
A
O
r
1
1
0
3
4
A
O
r
0
,
6
,
2
A
O
r
2
2
0
,
2
,
4
A
O
r
0
,
3
,
4
A
O
r
4
4
3
3
i
P
i
1
,
0
,
0
e
:
F
F
:
e
F
F
i
i
200
1
,
0
,
0
200
,
0
,
0
F
480
1
,
0
,
0
480
,
0
,
0
F
2
1
60
1
,
0
,
0
60
,
0
,
0
F
60
1
,
0
,
0
60
,
0
,
0
F
4
3
4
4
:
r
F
160
F
i
4
1
i
1440
1440
960
3
3
2
480
r
F
:
r
F
i
i
0
,
1200
,
400
0
,
6
,
2
200
r
F
1440
,
1440
,
960
3
,
3
,
2
480
r
F
2
2
1
1
0
,
120
,
240
0
,
2
,
4
60
r
F
0
,
180
,
240
0
,
3
,
4
60
r
F
4
4
3
3
4
1440
,
60
,
80
r
F
i
i
4
1
i
3
1
1
r
F
i
i
4
9
;
375
,
0
;
5
,
0
9
,
8
3
,
2
1
1440
,
60
,
80
160
1
F
r
F
O
O
i
4
1
i
i
i
1
i
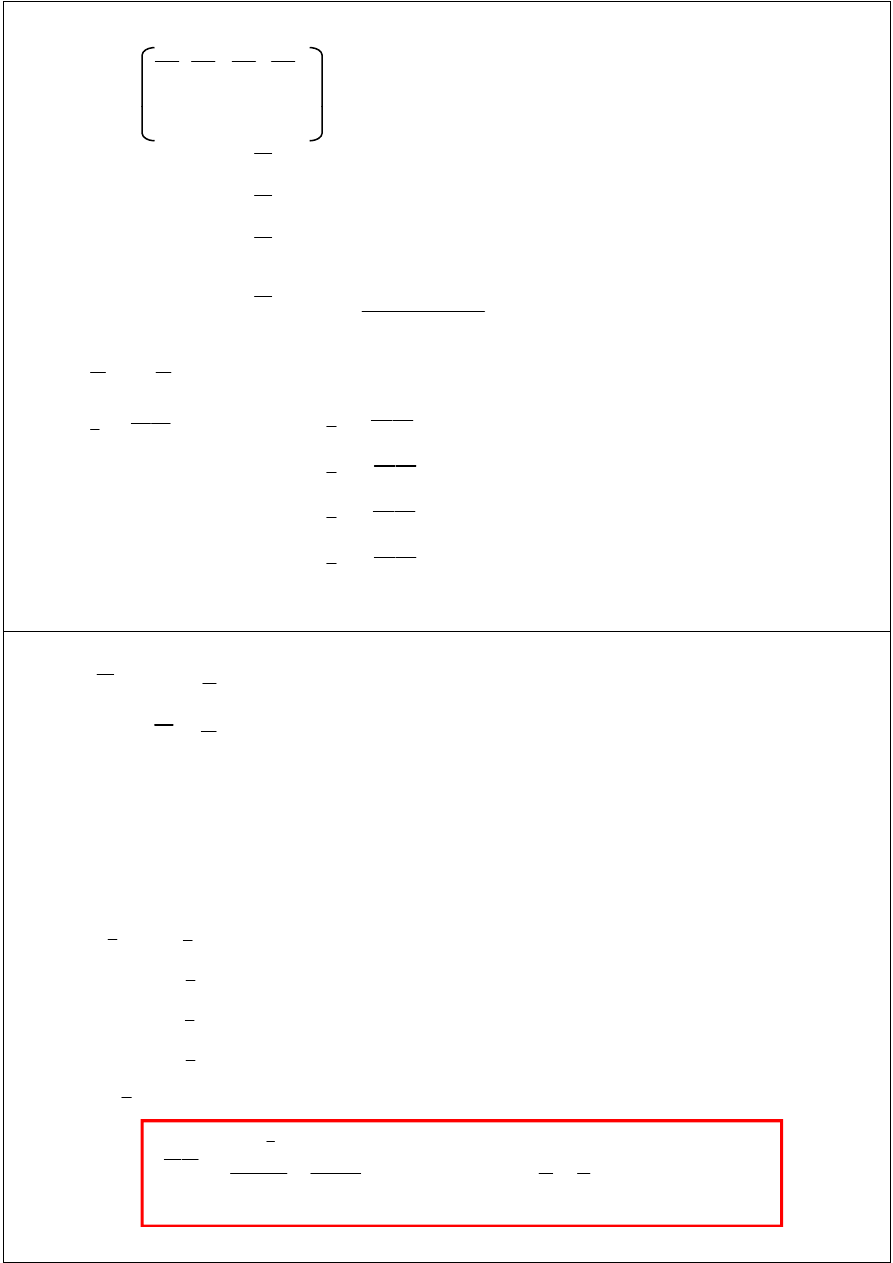
*
Wyszukiwarka
Podobne podstrony:
W1 Statyka
GF w1 16.02, Geologia GZMiW UAM 2010-2013, I rok, Geologia fizyczna, Geologia fizyczna - wykłady, 01
W1 01.10.2013, Dietetyka pediatryczna
Farmakologia W1 22 11 2013 leki przeciwbólowe
Egzamin MT 2013 06 24 rea
Egzamin MT 2013 06 12 red
Logika W1 2013 14
INSTR.Mt-2, Maszynista-Pomocnik maszynisty 2013
Egzamin MT 2013 06 12 rea
Optymalizacja w1 2013
3WykPNOP 2013 14 zas mt mo zzl niepelny
GF w1 7.10 (2), Geologia GZMiW UAM 2010-2013, I rok, Geologia fizyczna, Geologia fizyczna - wykłady,
ZWC w1 2013 2014
Farmakologia W1 22 11 2013 leki przeciwbólowe
w1 03 10 2013
TM w1 2013
więcej podobnych podstron