Zad. 1.
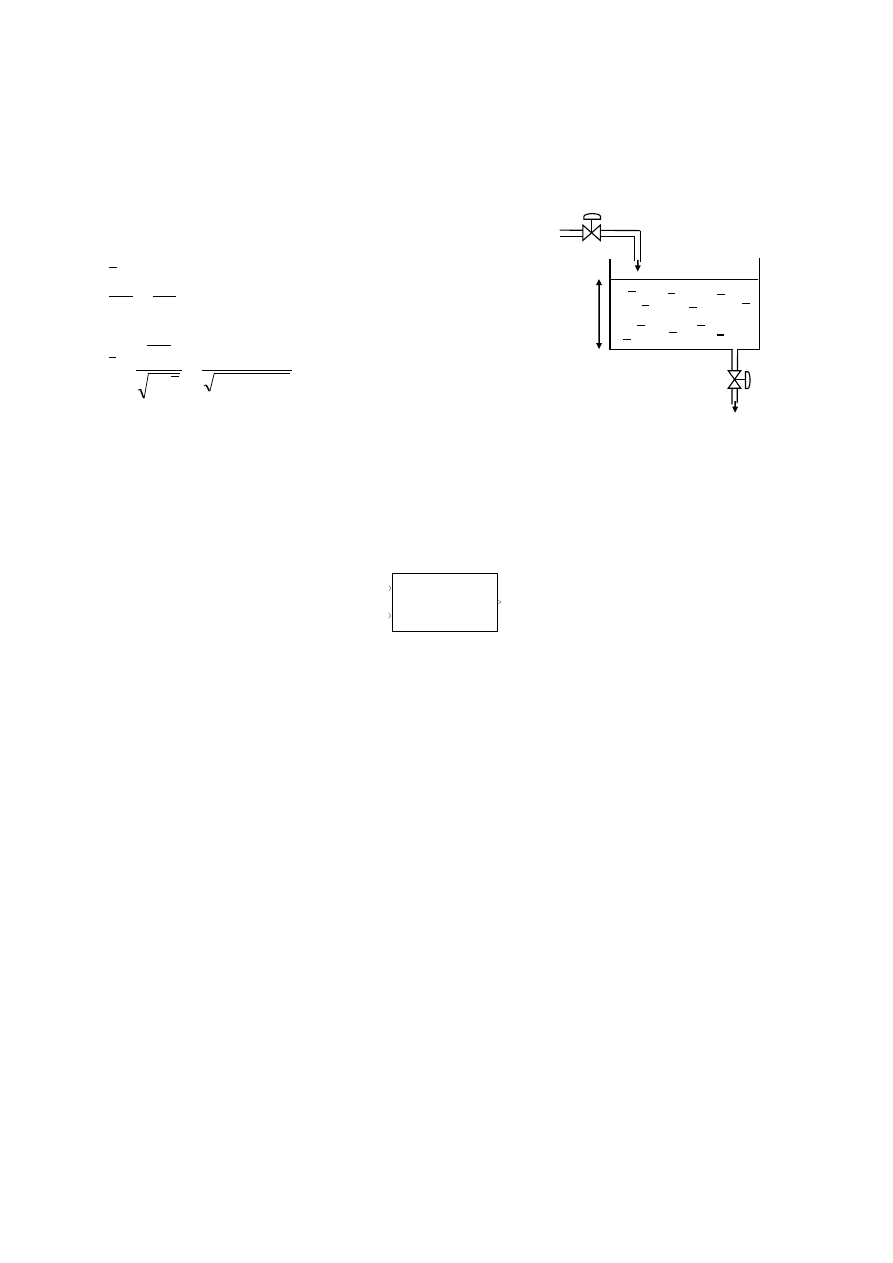
Zaprojektuj układ regulacji poziomu cieczy w zbiorniku przedstawionym na poniższym rysunku. Zastosuj
regulator typu PID. Nominalny poziom cieczy w zbiorniku wynosi 10 m.
Specyfikacja
/s
m
03
.
0
/h
m
108
m
10
m
5
=
3
3
2
wy
we
q
q
h
A
2
m
00214
.
0
10
81
.
9
2
03
.
0
2
h
g
q
s
we
Sygnał sterujący generowany przez regulator [zakres <0,1>] odpowiada liniowo przepływowi q
we
[zakres <0, 1>
m
3
/s]. Instalacja jest wyposażona w ciągły sygnał (y) pomiaru wysokości cieczy w zbiorniku [zakres <0,10> V ]
odpowiadający liniowo wysokości cieczy (h) [zakres <0, 20> m]. Zawór wyjściowy może być sterowany w
trybie ręcznym za pomocą sygnału s [zakres <0,1>] odpowiadającemu liniowo polu przekroju otwarcia zaworu
w zakresie <0,1> m
2
. Projektowany regulator nie ma wpływu na stopień otwarcia zaworu wyjściowego. Układ
pomiarowo-sterujący pracuje z cyklem 1 s. Eksperymenty dla obiektu mogą być przeprowadzone za pomocą
poniższego bloku Simulink (zbiornik całkowicie opróżniony).
Wyznaczenia parametrów modelu transmitancyjnego należy dokonać za pomocą 2 punktów pomiarowych.
Należy zastosować „typowy” regulator stosowany dla uzyskanego modelu obiektu (wykład).
Na prośbę egzaminującego należy przedstawić następujące wyniki prac:
- projekt Simulink umożliwiający przeprowadzenie eksperymentu identyfikacyjnego w punkcie pracy – 10%
zmiana sterowania w stosunku do stanu nominalnego
- wykres dla przetworzonych danych pomiarowych wykorzystywanych do bezpośredniej identyfikacji modelu
transmitancyjnego – Matlab
- wzór ogólny dla przyjętego modelu transmitancyjnego oraz uzyskane wartości liczbowe jego parametrów
- wykres obrazujący porównanie wyników odpowiedzi obiektu i przyjętego modelu
- typ i wzór przyjętego regulatora
- wartości nastaw regulatora wyznaczone z metody tabelarycznej oraz przeliczone wartości nastaw dla bloku
regulatora stosowanego w Simulink
- projekt Simulink umożliwiający przeprowadzenie eksperymentu skoku wartości zadanej dla modelu obiektu
- projekt Simulink umożliwiający przeprowadzenie eksperymentu skoku wartości zadanej dla obiektu w
punkcie pracy - zwiększenie wartości zadanej o 10% w stosunku do wartości nominalnej
- projekt Simulink umożliwiający przeprowadzenie eksperymentu wprowadzenia zakłócenia skokowego w
układzie dla punktu pracy za pomocą otwarcia zaworu wyjściowego w zakresie o 20% większym niż w
stanie nominalnym
- fragmenty programów Matlab realizujące poszczególne punkty zadania: przetwarzanie danych, identyfikacja
parametrów modelu obiektu, symulacje, wykresy, wyliczenie nastaw regulatorów
Obiekt
qwe
s
y
A
h
q
we
q
wy
s
Otwieramy plik Zad4.mdl
Zapisujemy plik mat jak i mdl pod swoją nazwą
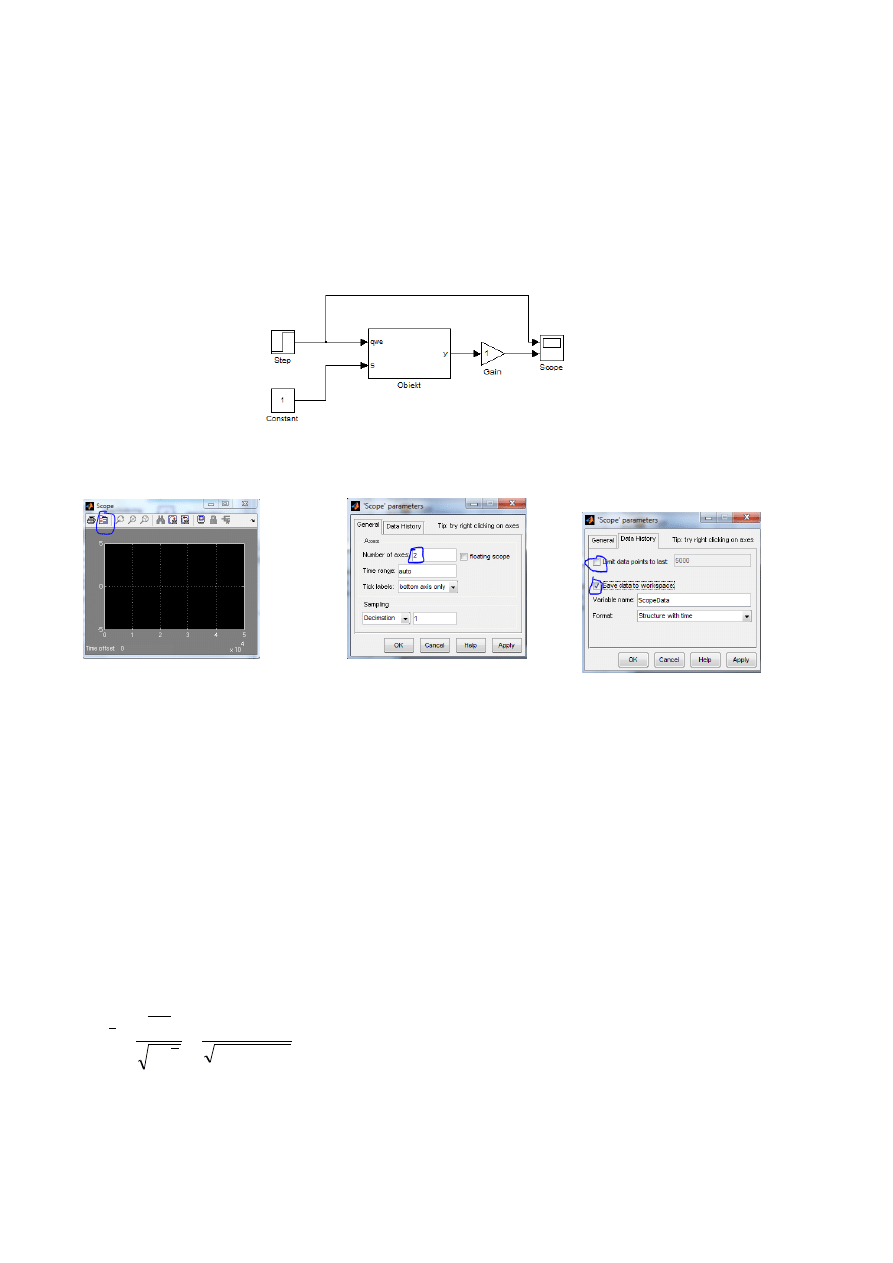
Tworzymy schemat do identyfikacji-wpisujemy w matlabie polecenie ‘simulink’
Ustawienia Scope:
Scope parameters
Liczba wejść; 2
wyłączenie limitu czasu i zapis danych do
określonej zmiennej ‘ScopeData’
Ustawienie Gain:
W zadaniu jest napisane: „Sygnał sterujący generowany przez regulator [zakres <0,1>] odpowiada liniowo
przepływowi q
we
[zakres <0, 1> m
3
/s]. Instalacja jest wyposażona w ciągły sygnał (y) pomiaru wysokości
cieczy w zbiorniku [zakres <0,10> V ] odpowiadający liniowo wysokości cieczy (h) [zakres <0, 20> m].”
Oznacza to że wyjście nie może być podpięte bezpośrednio tak jak wejście lecz trzeba sygnał wymnożyć przez
2, więc do gain wpisujemy 2
Ustawienie constant:
Do bloku constant wpisujemy wartość stałej
2
m
00214
.
0
10
81
.
9
2
03
.
0
2
h
g
q
s
we
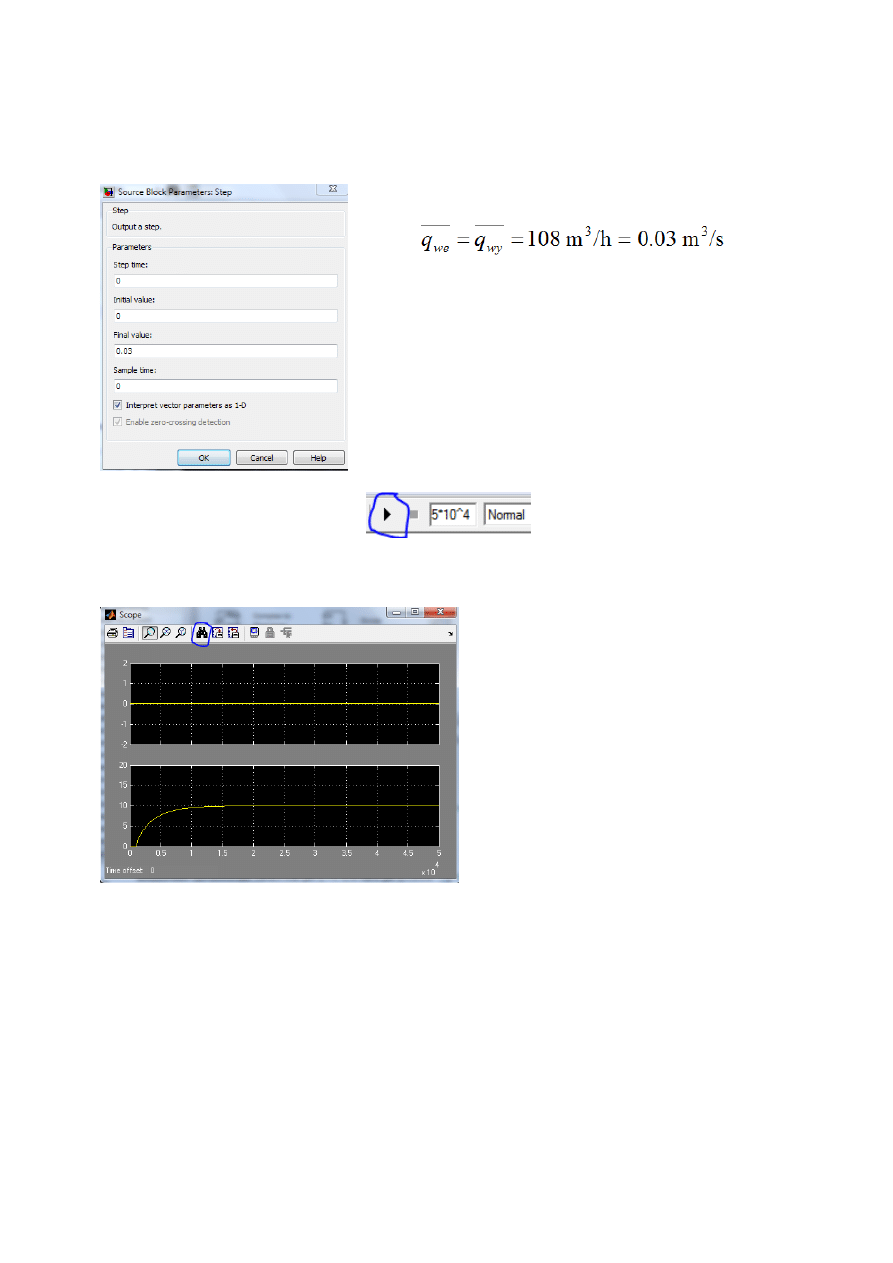
Ustawienie Step:
Pierwszym krokiem jest zidentyfikowanie obiektu (jaka będzie odpowiedź skokowa) i sprawdzenie przy
maksymalnym przepływie czasu po którym zbiornik się napełni.
W wierszu ‘final value’ wpisujemy 0.03, ponieważ mamy dane w
zadaniu:
Teraz możemy przeprowadzić symulację
Po symulacji od razu wciskamy ‘Autoscale’ ozn. lornetką
Po powiększeniu wykresu widać, że dolny przebieg
(wyjście) stabilizuje się przy wartości ok. 2.5*10^4. I
napełnił się do nominalnej wartości h=10m.
Ponad to pierwszą rzeczą którą powinniśmy zrobić
to identyfikacja czyli określenie jaki jest to rodzaj
odpowiedzi skokowej. Z wykresu widać, że jest to
inercja z opóźnieniem (rodzaje odpowiedzi
skokowych znajdują się w wykładzie 9). Wiedza ta
przyda nam się później przy aproksymacji przebiegu
i liczeniu transmitancji.
Kolejny punkt zadania to ‘projekt Simulink umożliwiający przeprowadzenie eksperymentu identyfikacyjnego w
punkcie pracy – 10% zmiana sterowania w stosunku do stanu nominalnego’
Sterowanie zmieniamy po czasie po którym przebieg się już ustabilizuje czyli u nas jest to 2.5*10^4. Wartość
nominalna przepływu to 0.03 a o 10% więcej to 0.033
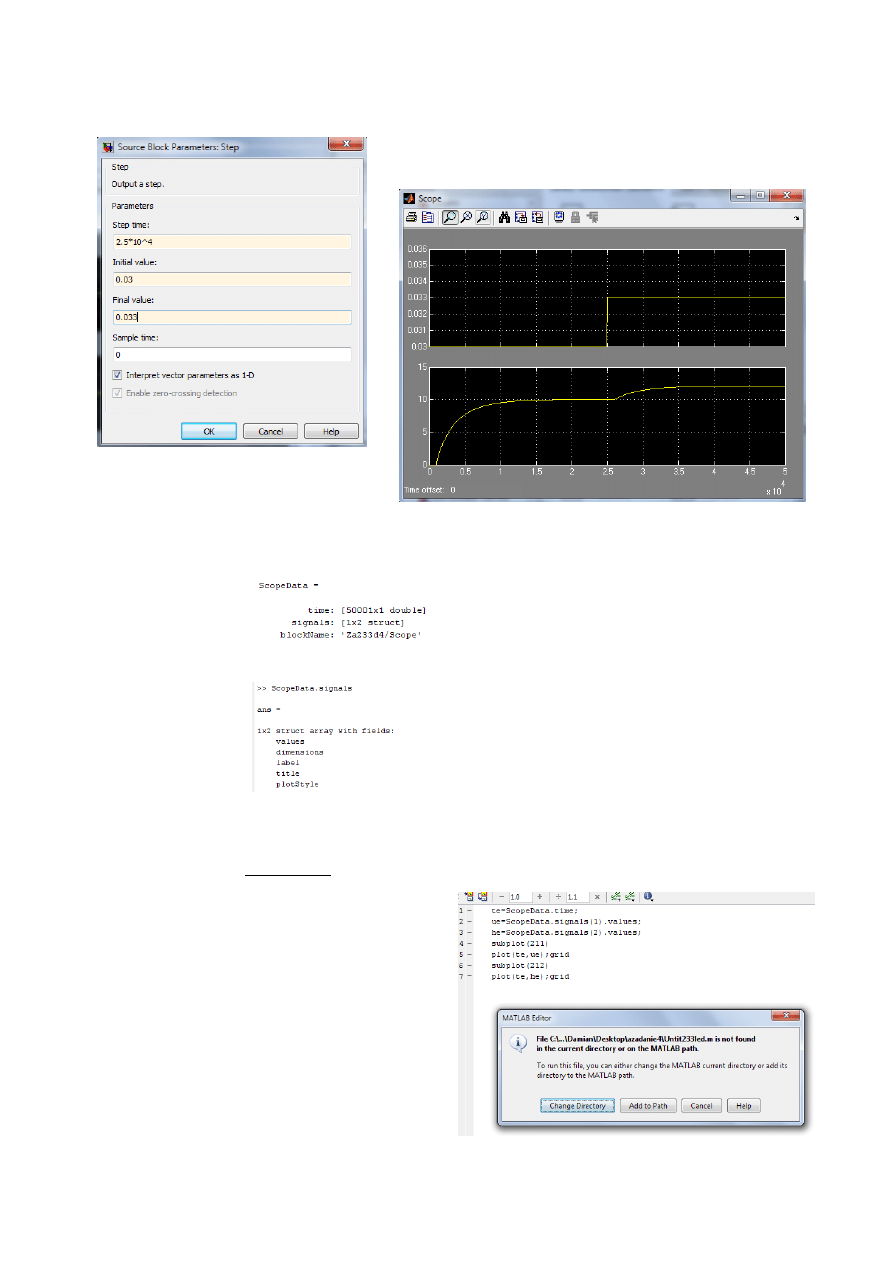
Więc zmieniamy ustawienia w bloku ‘Step’ i włączamy symulacje
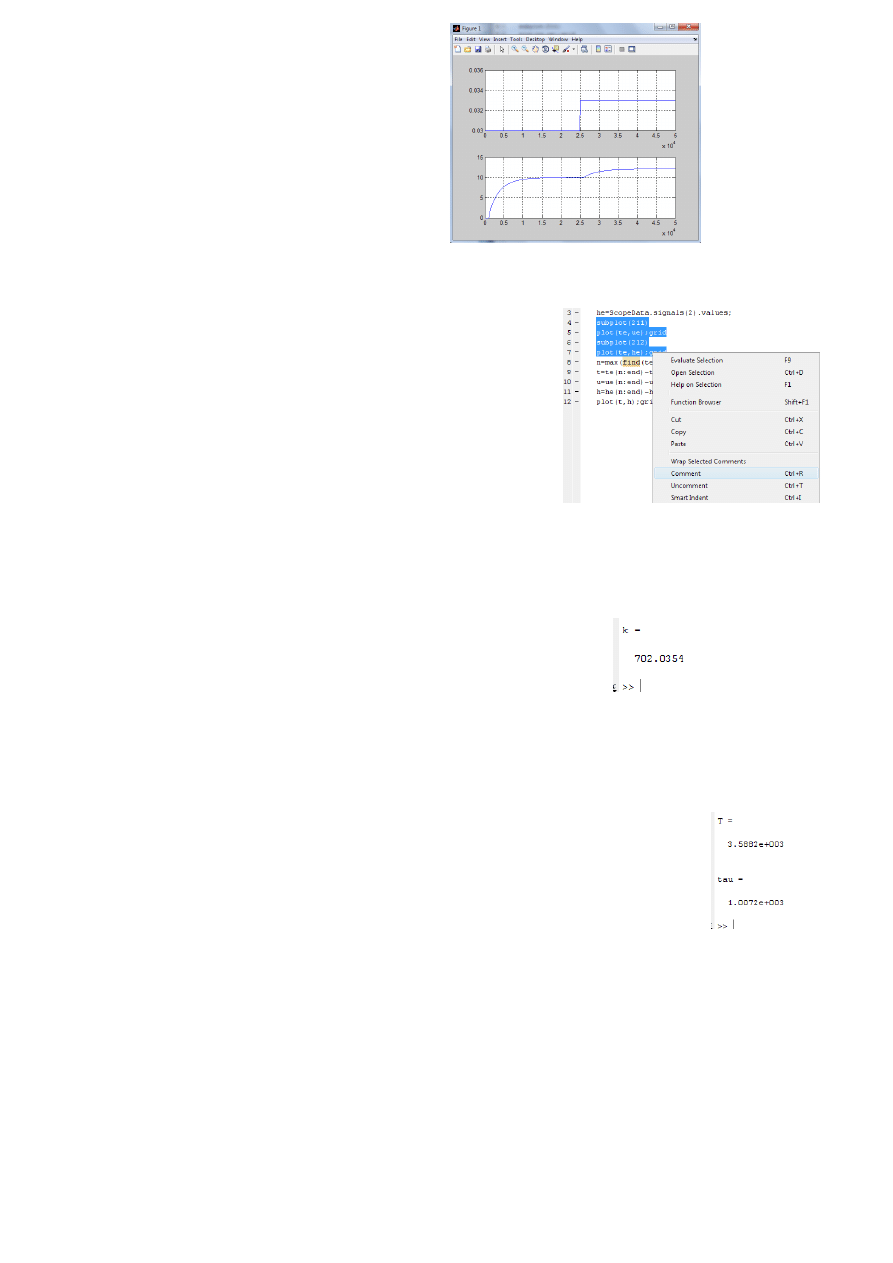
Powinien nam się pokazać przebieg z ustalonym przez nas skokiem
o czasie 2.5*10^4 z opóźnieniem:
Teraz wprowadzamy dwie komendy do matlaba:
ScopeData
ScopeData.signals
Następnie otwieramy w matlabie file->new->blank M-file
Pojawi nam się editor, zapisujemy go. Teraz wszystkie komendy będziemy wprowadzać do niego
te=ScopeData.time;
ue=ScopeData.signals(1).values;
he=ScopeData.signals(2).values;
subplot(211)
plot(te,ue);grid
subplot(212)
plot(te,he);grid
Po tej komendzie klikamy F5 I klikamy Add to Path
Powinno się nam pojawić okno z wykresami
Piszemy dalej:
n=max(find(te<=2.5*10^4)); -wartość czasu jest zmienna, zależy
t=te(n:end)-te(n);
jak odczytamy z wykresu
u=ue(n:end)-ue(n-1);
h=he(n:end)-he(n);
plot(t,h);grid
Po tej komendzie enter i zaznaczamy cztery wiersze i dajemy comment
tak żeby pojawiły się procenty po lewej %
Piszemy dalej:
hu=h(end);
U=u(end);
k=hu/U -klikamy F5 i w oknie matlaba powinno pojawić się obliczone ‘k’
Piszemy dalej:
n10=max(find(h<=0.1*hu));
h10=h(n10);
t10=t(n10);
n90=max(find(h<=0.9*hu));
h90=h(n90);
t90=t(n90);
T=(t90-t10)/2.2
tau=t10-0.1*T - klikamy F5 i w oknie matlaba powinno pojawić się obliczone ‘T i tau’
Wzory na T i tau odczytujemy z materiałów pomocniczych dla inercji z opóźnieniem
Piszemy dalej: aproksymacja i transmitancja (jakoś tak )
[Lp Mp]=pade(tau,12);
L=k*Lp;
M=[T 1];
M1=conv(M,Mp);
hm=lsim(L,M1,u,t);
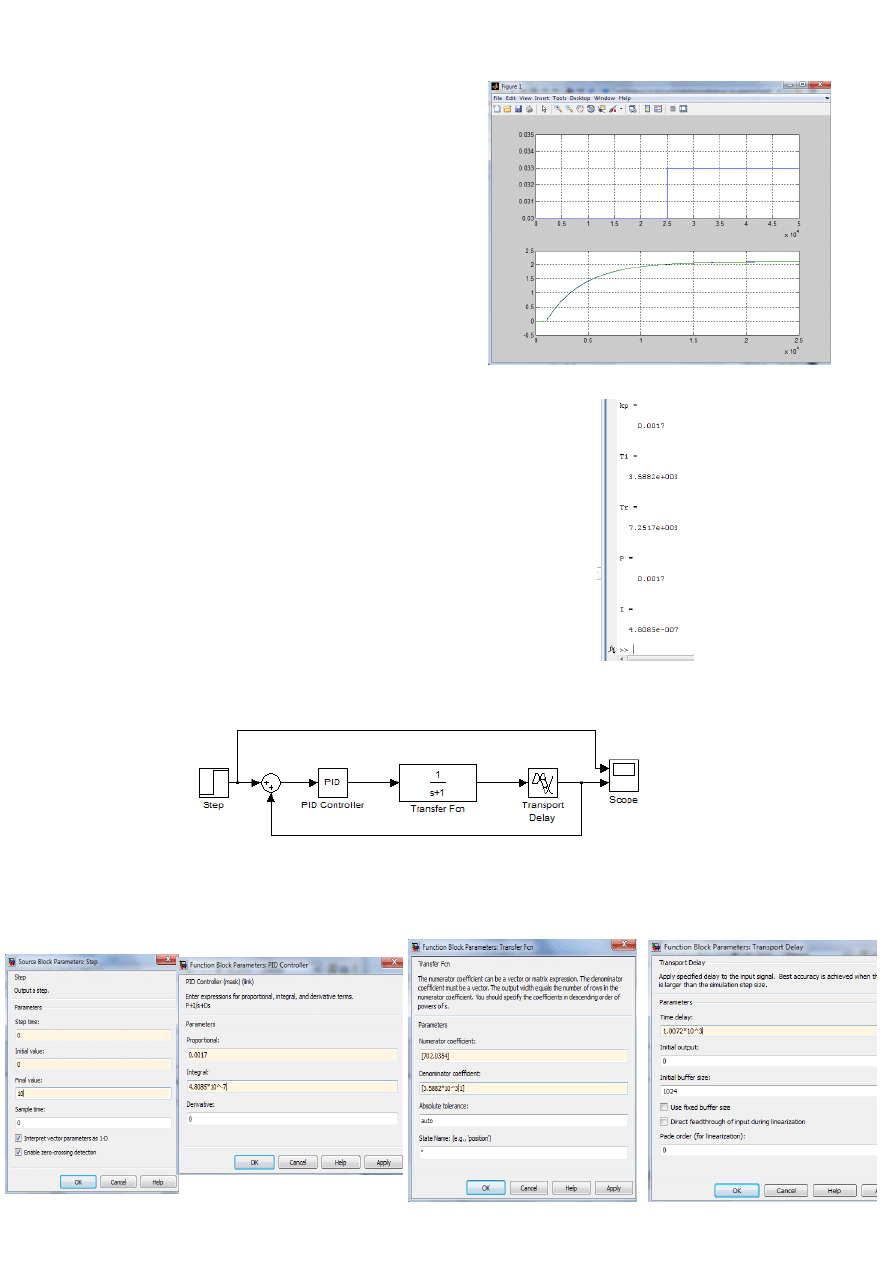
plot(t,h,t,hm);grid -klikamy F5
i w oknie Figure1 przebiegi
na wyjściu powinny nam sie nałożyć na siebie
Piszemy dalej:
kp=0.34*T/(k*tau)
-odczytujemy z tabeli
Ti=T
-odczytujemy z tabeli
Tr=7.2*tau
-odczytujemy z tabeli bądź dany w zadaniu
P=kp
I=kp/Ti -klikamy F5 i wynik w matlabie
W oknie modelu tworzymy nowy model (drugi) file->new->model
Wprowadzamy dane do bloczków wg wyników z matlaba.
W sumatorze ustawiamy dolny + na -
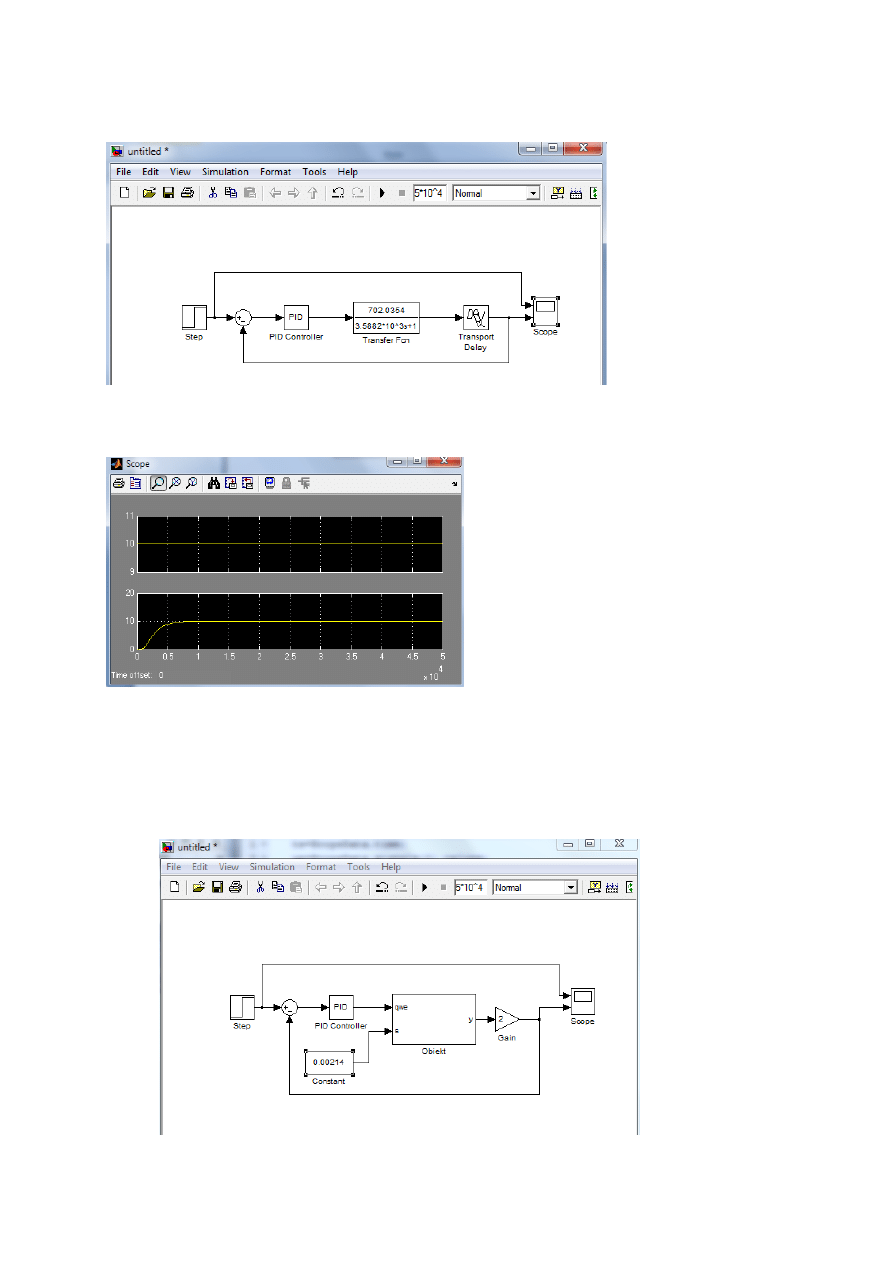
Schemat po wprowadzeniu parametrów:
Zwiększamy także czas
symulacji z 10.0 na np.
5*10^4 aby cały przebieg
był widoczny.
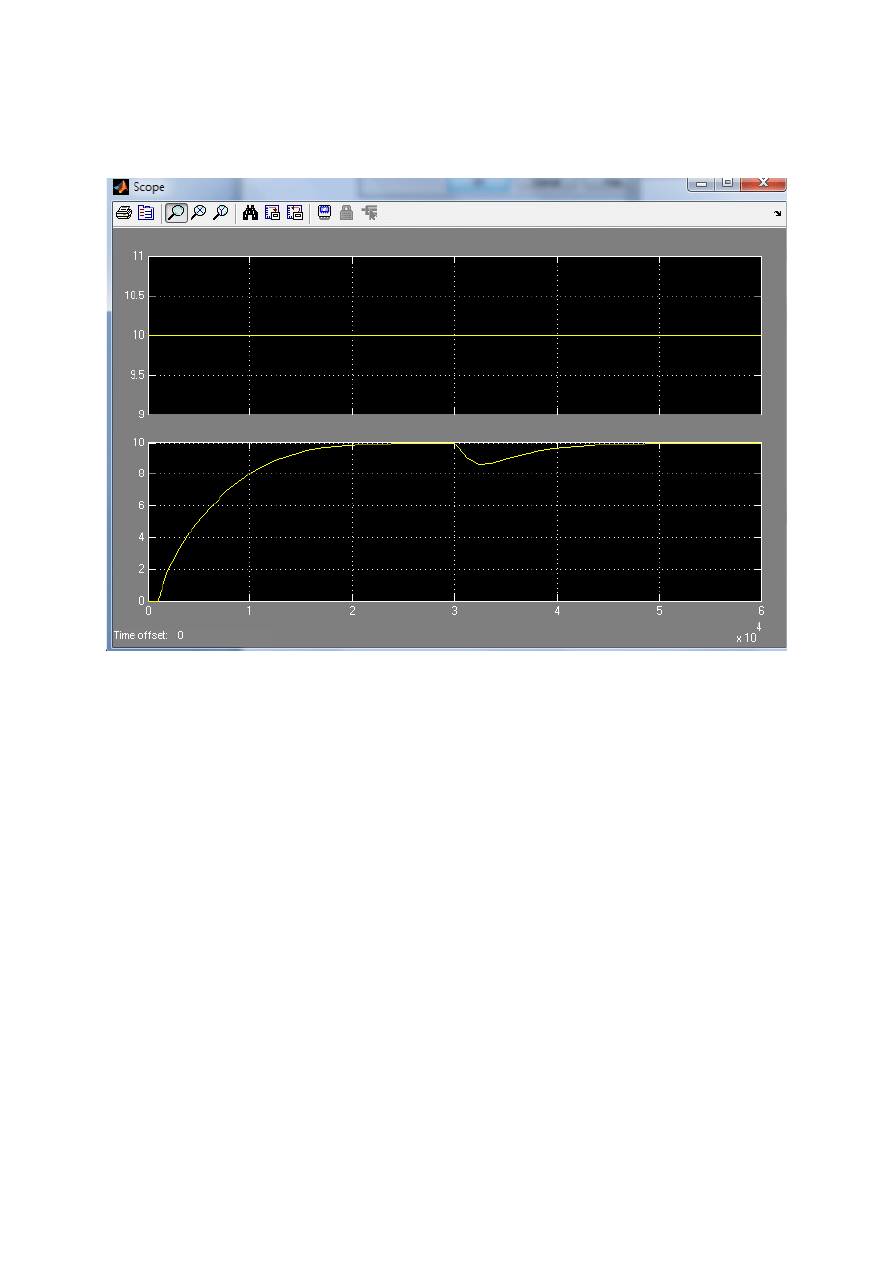
Puszczamy symulacje i powinno wyjść:
Teraz wyrzucamy z drugiego modelu bloki transfer FCN i transport delay i kopiujemy do niego nasz
obiekt, gain i constant z pierwszego modelu.
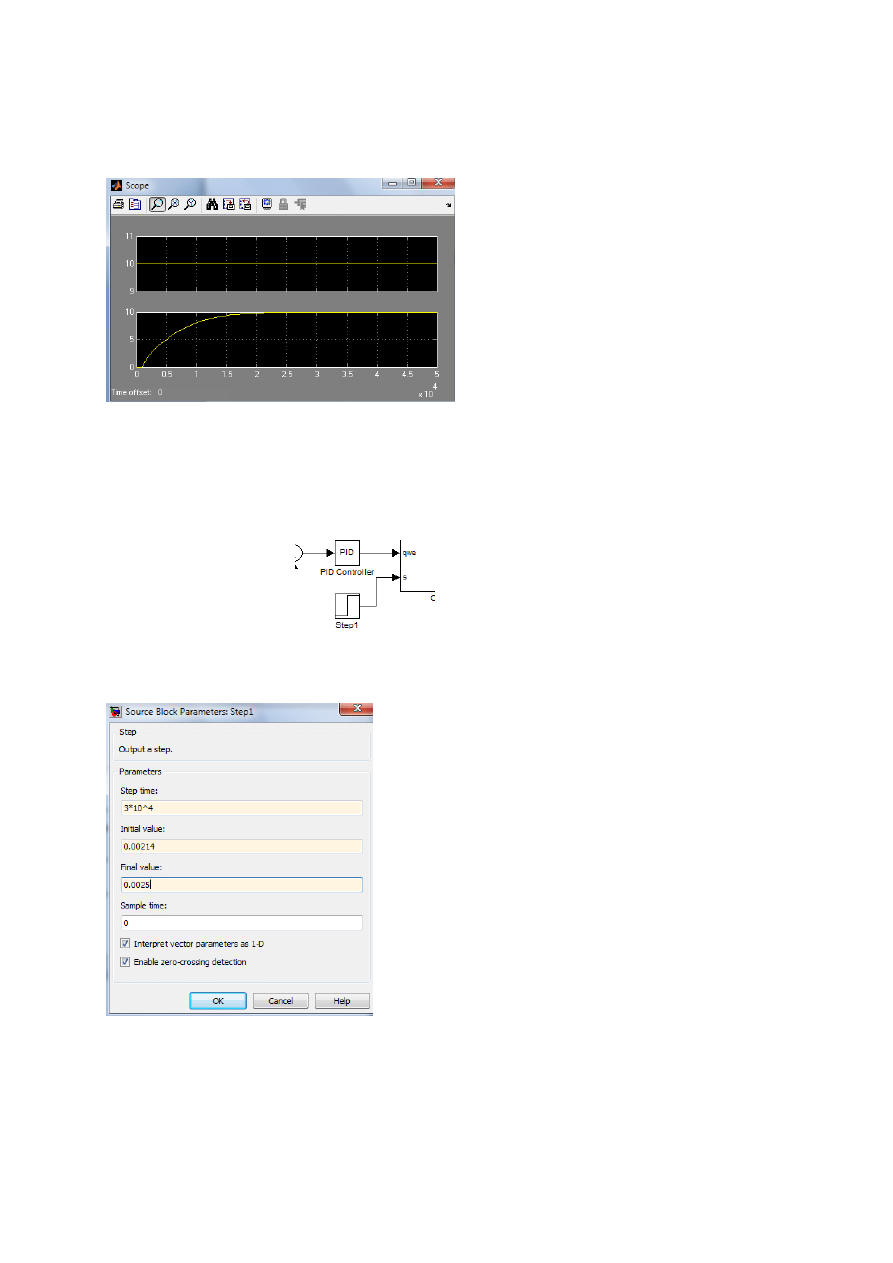
Symulujemy i powinno wyjść:
Następnie podmieniamy blok constant na blok step1 żeby sprawdzić jak, już nasz gotowy układ, reaguje na
wprowadzenie zakłócenia
Wprowadzamy do bloku step1 parametry naszego zakłócenia
3*10^4 – jest to czas w jakim wprowadzamy zakłócenie. Może
być inny, byle już po ustabilizowaniu przebiegu
0.00214 –nominalny stan otwarcia zaworu
0.0025- otwarcie zaworu o ok 20% (powiedziane w zadaniu)
większe od nominalnego w czasie 3*10^4 potrzebne do
sprawdzenia czy przebieg się ustabilizuje czyli poziom wody ustali
na h=10m
Wynik symulacji:
Jak widać poziom wody ustalił się powtórnie od nalewania (po zakłóceniu) na określonym na wejściu poziomie
10m

Pełny kod
Z opuźnieniem
ScopeData
ScopeData.signals
te=ScopeData.time;
ue=ScopeData.signals(1).values;
he=ScopeData.signals(2).values;
% subplot(211)
% plot(te,ue);grid
% subplot(212)
% plot(te,he);grid F5
n=max(find(te<=2*10^4));
t=te(n:end)-te(n);
u=ue(n:end)-ue(n-1);
h=he(n:end)-he(n);
plot(t,h);grid -procenty
hu=h(end);
U=u(end);
k=hu/U F5
n10=max(find(h<=0.1*hu));
h10=h(n10);
t10=t(n10);
n90=max(find(h<=0.9*hu));
h90=h(n90);
t90=t(n90);
T=(t90-t10)/2.2
tau=t10-0.1*T F5
[Lp Mp]=pade(tau,12);
L=k*Lp;
M=[T 1];
M1=conv(M,Mp);
hm=lsim(L,M1,u,t);
plot(t,h,t,hm);grid F5
kp=0.34*T/(k*tau)
Ti=T
Tr=7.2*tau
P=kp
I=kp/Ti F5
Bez opóźnienia
. przepisujemy początek
.
.
.
.
.
T=(t90-t10)/2.2
-odczytujemy z tabeli
tau=t10-0.1*T F5
-wyrzucamy cały wiersz
[Lp Mp]=pade(tau,12);
-wyrzucamy cały wiersz
L=k*Lp;
-wyrzucamy Lp
M=[T 1];
M1=conv(M,Mp);
-wyrzucamy cały wiersz
hm=lsim(L,M1,u,t);
-zamiast M1 samo M
plot(t,h,t,hm);grid F5
kp=0.34*T/(k*tau)
-odczytujemy z tabelki
Ti=T
Tr=7.2*tau F5
-dany bądź z tabeli
P=kp
I=kp/Ti F5
W przypadku PID należy podać wzór na D i z tabeli odczytać Td
Gdy nie ma opóźnienia to nie wstawiamy bloku transport delay
Wyszukiwarka
Podobne podstrony:
Automatyzacja zadania cz II id Nieznany
Zadania egzaminacyjne Analiza matematyczna 2014 Politechnika Poznańska PP, Automatyka i Robotyka, An
automatyka zadania cw 1 cz 1 id Nieznany
Egzamin zadania Zadania2008 id Nieznany
automatyka zadania cw 3 id 7338 Nieznany
zadania egzaminacyjne
312[01] 01 122 Arkusz egzaminac Nieznany (2)
04 18 belki i ramy zadanie 18id Nieznany (2)
finanse miedzynarodowe egzamin Nieznany
Matematyka zadania egzaminacyjne Zestaw7 2002
Pomiary Automatyka Robotyka 12 Nieznany
Zadania egzaminacyjne 2003, Nieorganiczna, chemia2, Arkusze powtórzeniowe, Pobieranie1, studia 1.2,
ZADANIE EGZAMINACYJNE1
belki proste zadania z rozwiaza Nieznany (2)
finnse DO DRUUUKU EGZAMIN Nieznany
archiwum panstwowe zadanie egza Nieznany
więcej podobnych podstron