
Laboratorium podstaw automatyki i sterowania
„Regulacja z regulatorem PID”
Grupa EE
Sekcja 5
Studenci:
Albert Straszak
Mirosław Pastor
Rafał Kumala
Andrzej Sapeta
Prowadzący:
dr inż. Henryk Urzędniczok
data wykonania: 21.05.2009
y
AKT
ε
+
y
Z
u
y
-
Regulator
PID
Element
wykonawczy
Obiekt
sterowany
Układ
pomiarowy
1. Cel ćwiczenia.
W ćwiczeniu należy zarejestrować przebiegi czasowe wielkości regulowanej oraz
wielkości sterującej na wyjściu regulatora PID w odpowiedzi obiektu na sygnał skokowy.
Odpowiedź skokowa badanego obiektu pozwala wyznaczyć:
- parametry obiektu
-weryfikację poprawności doboru typu regulatora oraz jego nastaw
Przebiegi są rejestrowane przez program rejestratora, który umożliwia obserwację
przebiegów na bieżąco z czasem rejestracji do 6 minut. Wyznaczone parametry obiektu
wykorzystuje się do wyznaczenia nastaw regulatora PID według tabeli zawierającej
optymalne nastawy dla danego typu regulatora .
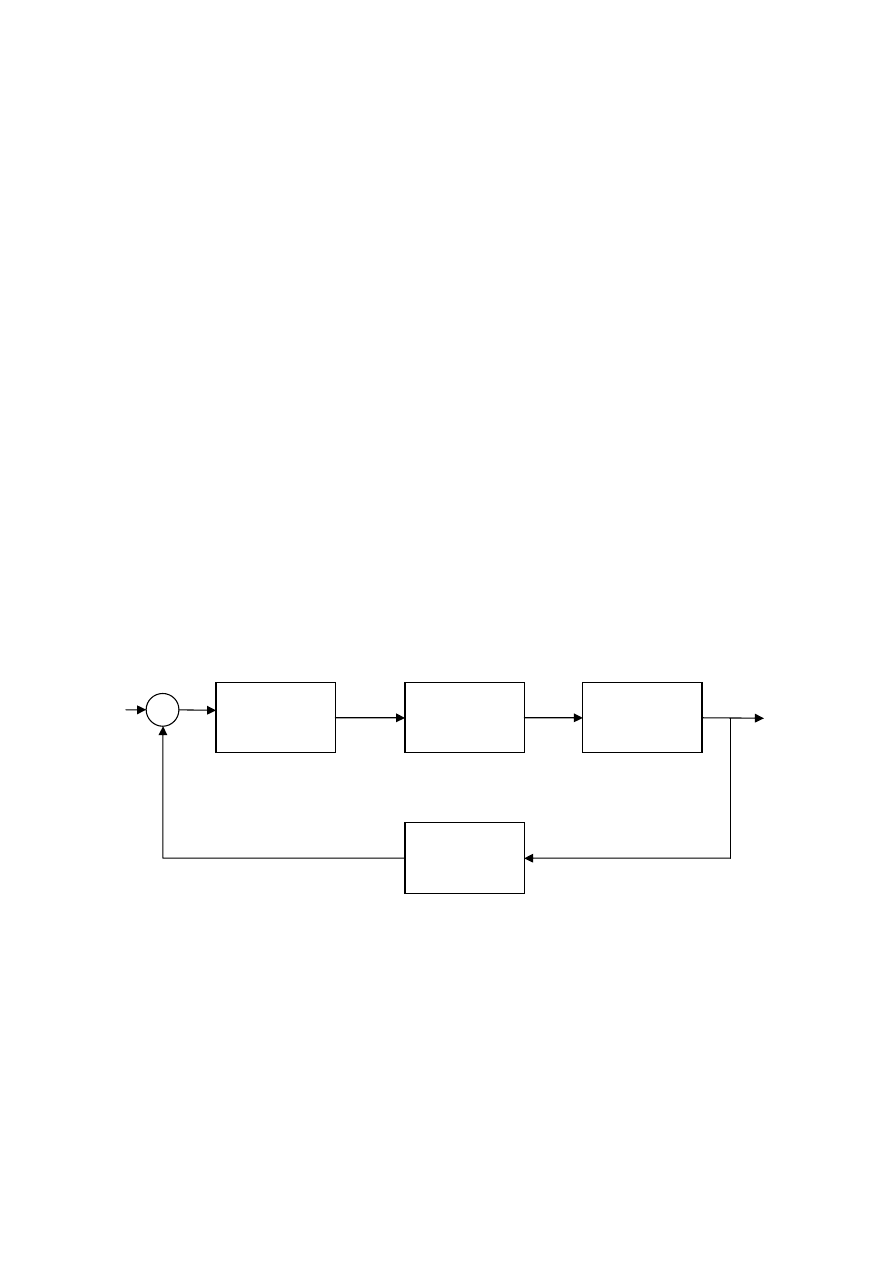
2. Schemat badanego układu.
a) schemat blokowy:
gdzie:
y – wielkość regulowana
y
Z
– wartość zadana wielkości regulowanej
y
AKT
– wielkość regulowana
ε – uchyb regulacji
u – sygnał sterujący
ѵ
AKT
ε
+
ѵ
Z
Komputer
-
Układ
PID
RS232
Układ
pomiarowy
Sterowane
źródło
prądowe
Rejestrator
2 kanałowy
u
termopara
grzałka
sterowanie
zasilanie
grot
lutownicy
b) schemat rzeczywistego układu regulacji:
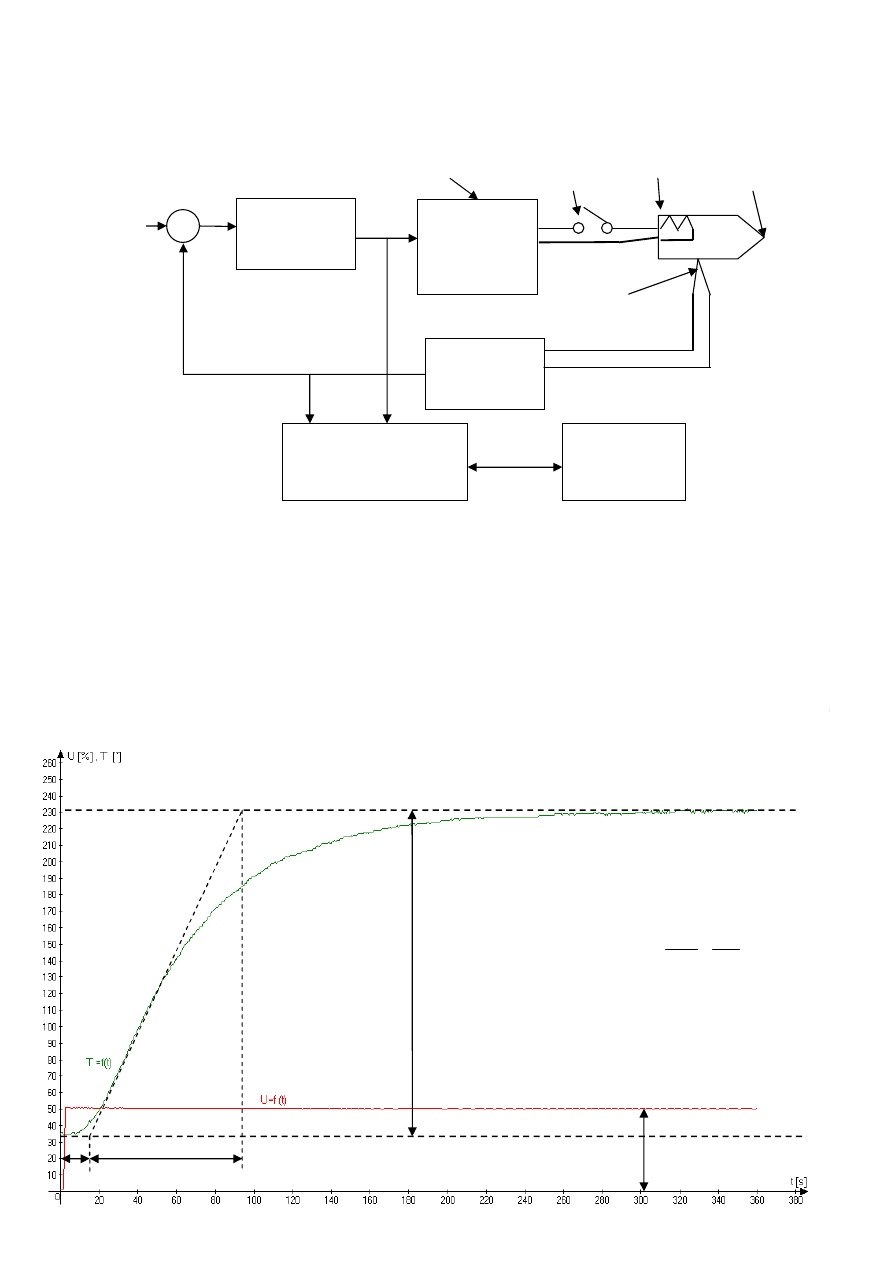
3. Wyznaczanie parametrów obiektu oraz nastaw regulatora.
a) wykres odpowiedzi skokowej dla: ∆U =50% , ∆y=0%
∆U – względna zmiana mocy (odpowiadająca zmianie temperatury)
∆U = (0÷100)%= (0÷450) [ ̊C] , → 4,5 [ ̊C]/ 1%
∆y– przeregulowanie
∆U=50%
∆
ѵ
=195[°]
T=84 [s]
τ=
13 [s]
%
C
U
k
∆U
=50% dla ∆y=0%
wyznaczanie parametrów obiektu:
przyrost temperatury:
C
C
C
195
35
230
zastępcze opóźnienie:
s
13
zastępcza stała czasowa:
s
T
84
względna zmiana mocy (wartość sygnału sterującego):
%
50
U
współczynnik wzmocnienia obiektu:
%
9
,
3
%
50
195
%
C
C
C
U
k
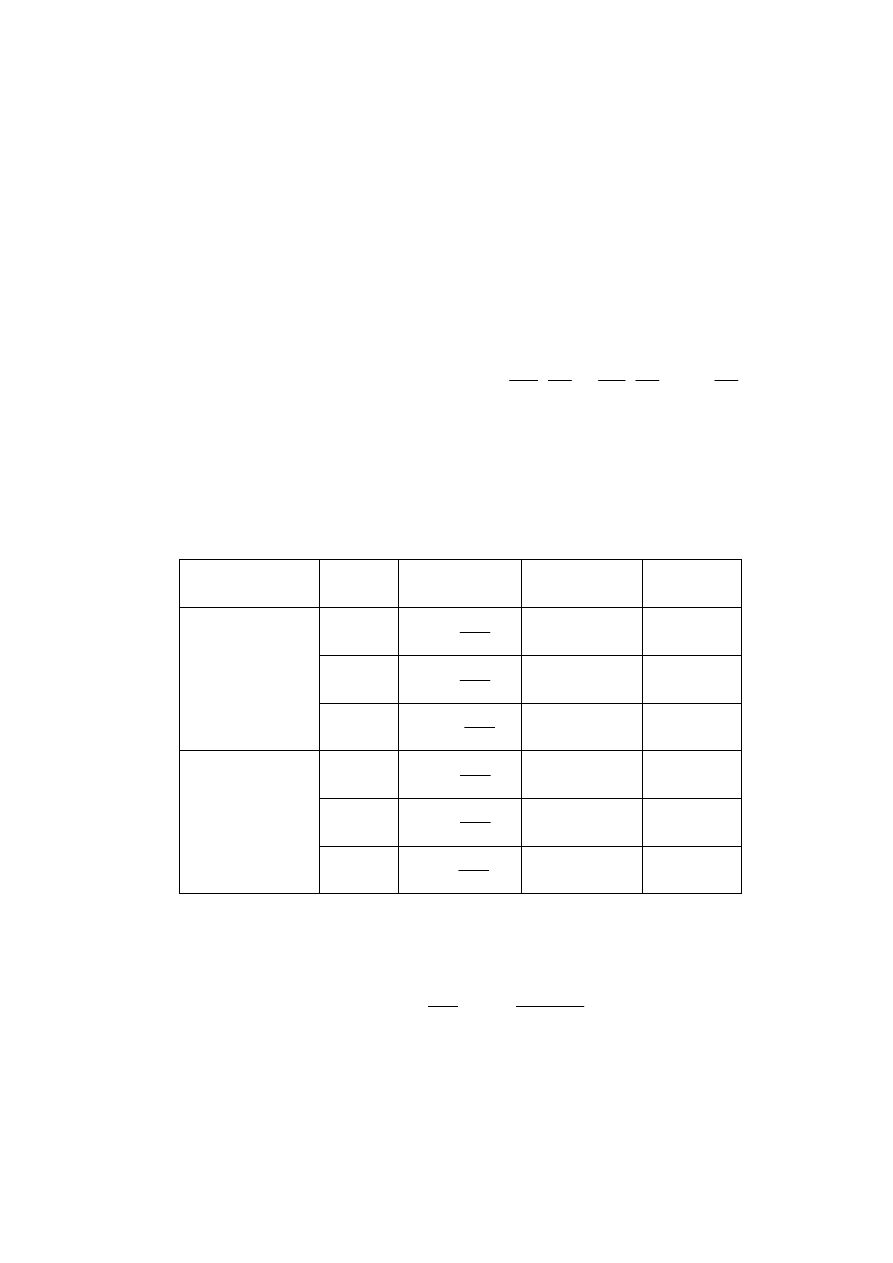
wyznaczanie nastaw regulatora:
Nastawy regulatora dobiera się korzystając z tabeli zawierającej optymalne
wartości nastaw dla danego typu regulatora:
Rodzaj przebiegu
przejściowego
Typ
k
r
T
i
T
d
∆y=0 %, min (t
r
)
P
k
T
3
,
0
―
―
PI
k
T
6
,
0
T
5
,
0
8
,
0
―
PID
k
T
95
,
0
4
,
2
4
,
0
∆y=20 %, min (t
r
)
P
k
T
7
,
0
―
―
PI
k
T
7
,
0
T
03
―
PID
k
T
2
,
1
2
4
,
0
nastawy regulatora dla przebiegu typu
∆y=0 %, min (t
r
):
-wzmocnienie regulatora:
6
,
1
57
,
1
]
[
13
9
,
3
]
[
84
95
,
0
95
,
0
s
s
k
T
k
r
-czas wyprzedzania:
]
[
5
]
[
2
,
5
]
[
13
4
,
0
4
,
0
s
s
s
T
d
-czas zdwojenia:
]
[
31
]
[
2
,
31
]
[
13
4
,
2
4
,
2
s
s
s
T
i
nastawy regulatora dla przebiegu typu
∆y=20 %, min (t
r
):
-wzmocnienie regulatora:
2
98
,
1
]
[
13
9
,
3
]
[
84
2
,
1
2
,
1
s
s
k
T
k
r
-czas wyprzedzania:
]
[
5
]
[
2
,
5
]
[
13
4
,
0
4
,
0
s
s
s
T
d
-czas zdwojenia:
]
[
26
]
[
13
2
2
s
s
T
i
b) wykres dla ∆U =40% , ∆y=0%
∆U=40%
∆
ѵ
=150[°]
τ=
8 [s]
T=32 [s]
∆U =40% dla ∆y=0%
∆y
r
%
15
r
y
wyznaczanie parametrów obiektu:
rzeczywista wartość przeregulowania
przyrost temperatury:
C
C
C
150
45
195
zastępcze opóźnienie:
s
8
zastępcza stała czasowa:
s
T
32
względna zmiana mocy:
%
40
U
rzeczywista wartość przeregulowania:
współczynnik wzmocnienia obiektu:
%
8
,
3
%
75
,
3
%
40
150
%
C
C
C
C
U
k
wyznaczanie nastaw regulatora:
Nastawy regulatora dobiera się korzystając z tabeli w sposób identyczny
jak poprzednio.
nastawy regulatora dla przebiegu typu
∆y=0 %, min (t
r
):
-wzmocnienie regulatora:
1
]
[
8
8
,
3
]
[
32
95
,
0
95
,
0
s
s
k
T
k
r
-czas wyprzedzania:
]
[
3
]
[
2
,
3
]
[
8
4
,
0
4
,
0
s
s
s
T
d
-czas zdwojenia:
]
[
19
]
[
2
,
19
]
[
8
4
,
2
4
,
2
s
s
s
T
i
nastawy regulatora dla przebiegu typu
∆y=20 %, min (t
r
):
-wzmocnienie regulatora:
3
,
1
26
,
1
]
[
8
8
,
3
]
[
32
2
,
1
2
,
1
s
s
k
T
k
r
-czas wyprzedzania:
]
[
3
]
[
2
,
3
]
[
8
4
,
0
4
,
0
s
s
s
T
d
-czas zdwojenia:
]
[
16
]
[
8
2
2
s
s
T
i
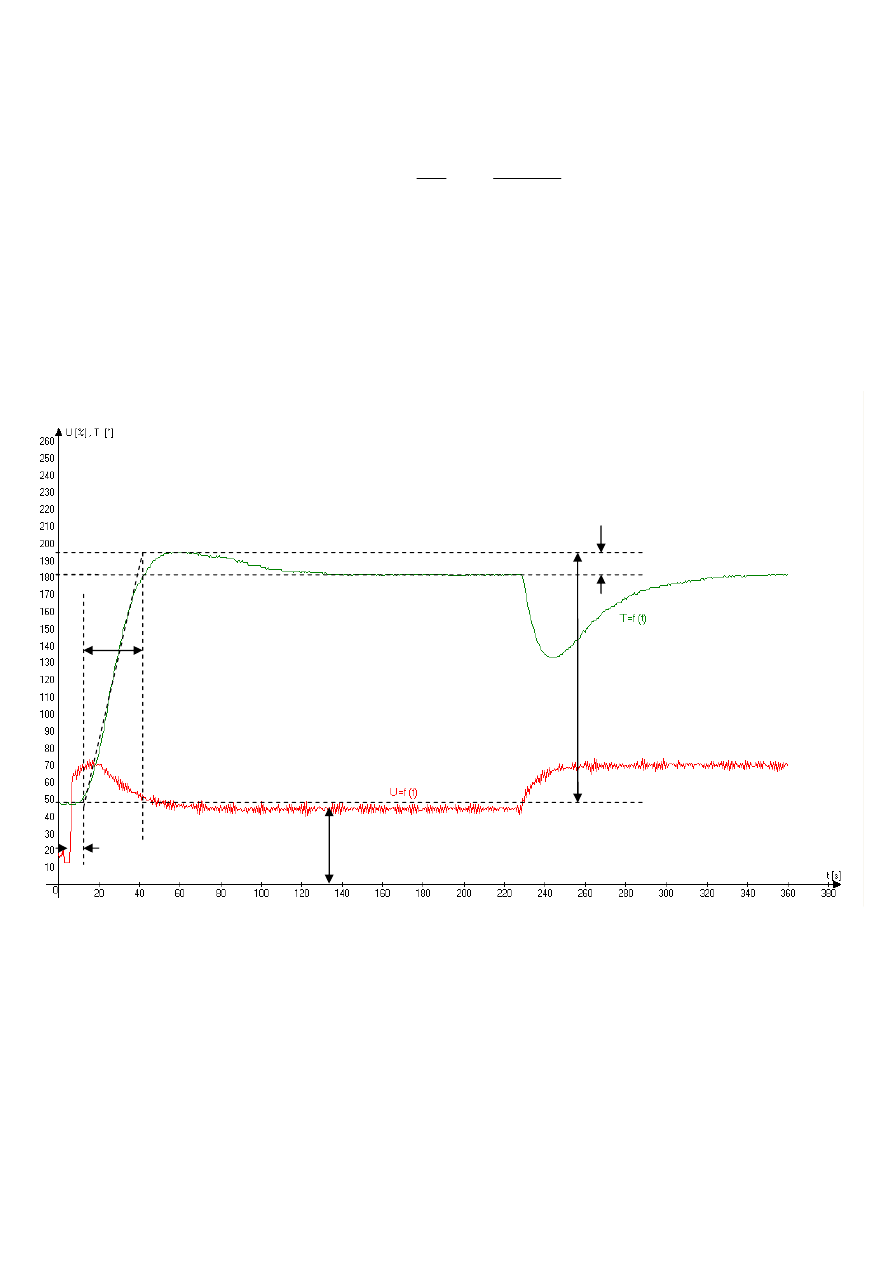
4. Wykresy.
∆U =35% dla ∆y=0% po 200s zał. wentylatora
∆U =10% dla ∆y=0%
zał. wentylatora
∆U =10% dla ∆y=0% zał. wentylatora i wpływ dotknięcia grotu
- wykres odpowiedzi skokowej dla chłodzenia
dotknięcie grotu
∆U =10% dla ∆y=20%
rozpoczęcie chłodzenia

5. Wnioski.
Wyznaczone parametry badanego obiektu oraz nastawy regulatora PID wyznaczane
metodą graficzną różnią się co do wartości dla ∆U =50% oraz ∆U =40%. Różnice pomiędzy
parametrami obiektu i regulatora dla dwóch różnych wartości względnej zmiany mocy
wynikają ze skokowych zmian sygnału wyjściowego oraz dodatkowo z jego różniczkowania
(co odpowiada mnożeniu przez czas wyprzedzenia T
d
członu różniczkującego). Wraz ze
względną zmianą mocy następuje zmiana temperatury obiektu.
Pomimo realizacji modelu przebiegu aperiodycznego przy jednoczesnej minimalizacji
czasu regulacji (przebiegi dla y=0%) widać, że przeregulowanie występuje w układzie. Wiąże
się to z pewną dokładnością wyznaczania parametrów obiektu, wynikającą z odczytu
wartości na podstawie wykresu wykresu. Ponadto w metodzie graficznej przy wyznaczaniu
parametrów obiektu zakłada się obiekt pierwszego rzędu, natomiast rzeczywisty obiekt
badany jest rzędu drugiego.
Na wykresie przedstawiającym odpowiedź skokową w górę widać, że zmiana
temperatury obiektu sterowanego (grotu lutownicy) nie następuje w sposób skokowy.
Również w przypadku skoku w dół zmiana temperatury nie następuje gwałtownie, widać
jednak, że temperatura stabilizuje się na zadanym poziomie w krótszym czasie. Po załączeniu
wentylatora następuje chłodzenie obiektu do temperatury niższej niż ustalona, jednakże po
pewnym czasie regulator powoduje powrót temperatury obiektu do wartości zadanej.

Wyszukiwarka
Podobne podstrony:
1 PM PPASPA Pid 9555 Nieznany (2)
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
~lock PID
pid gotowe
Zasada Dzialania PID
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
04Nastawy regulatora PID
pid
PID
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
PID 8 11 2015
Badanie układu sterowania z regulatorem PID
Regulator PID Cool
Regulator PID (2)
DOBÓR NASTAW REGULATORA PID
pid lab
PID
PID-A
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
więcej podobnych podstron