Laboratorium Podstaw Automatyki
REGULACJA Z ZASTOSOWANIEM REGULATORA PID
1. Wprowadzenie
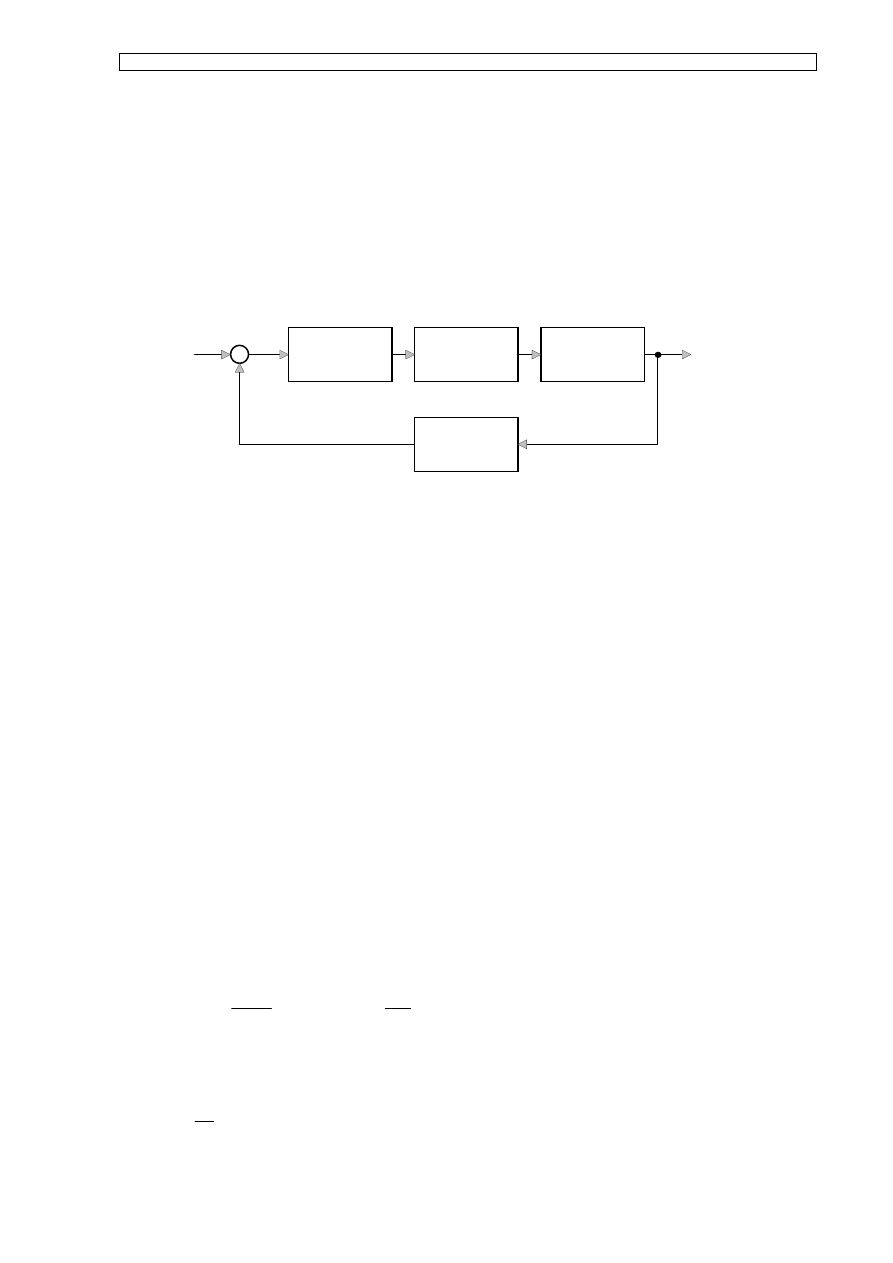
Podstawowa struktura zamkniętego układu regulacji pokazana jest na rysunku 1. Celem
regulacji jest uzyskanie przez wielkość regulowaną y wartości zadanej y
z
, tzn. sprowadzenie
błędu (uchybu) regulacji do zera. Układ regulacji jest układem dynamicznym, tzn. osiąganie
celu regulacji następuje w trakcie procesu regulacji zachodzącego w określonym
(skończonym) czasie.
+
_
Regulator
Element
wykonawczy
Obiekt
sterowany
Układ
pomiarowy
y
- wielkość regulowana
ε
- błąd (uchyb) regulacji
y
- wskazywana przez układ pomiarowy wartość wielkości regulowanej
u
- sygnal sterowania
y
- wartość zadana wielkości regulowanej
akt
z
y
y
z
y
akt
u
ε
Rys. 1. Ogólny schemat układu automatycznej regulacji
W projektowaniu układów regulacji istotne znaczenie ma dobór właściwego regulatora,
jego typu i parametrów. Kryterium doboru regulatora opiera się zwykle na minimalizacji
pewnego wskaźnika jakości regulacji, np. czasu regulacji lub strat energii w trakcie procesu
regulacji. Pożądaną transmitancję regulatora wyznacza się na podstawie przyjętego kryterium,
przy znajomości właściwości dynamicznych pozostałych elementów w układzie. W praktyce
jednak właściwości dynamiczne obiektu nie są na ogół znane, a ich eksperymentalne
wyznaczenie możliwe jest z ograniczoną dokładnością. W takiej sytuacji najczęściej stosuje
się regulatory uniwersalne, wśród których najszersze zastosowanie ma regulator PID.
2. Regulator PID
Regulator PID przetwarza sygnał wejściowy
ε
(t) według trzech realizowanych równolegle
operacji dynamicznych:
• wzmocnienia proporcjonalnego ze współczynnikiem k
r
,
• różniczkowania ze współczynnikiem k
r
T
d
, (T
d
czas wyprzedzenia),
• całkowania ze współczynnikiem k
r
/T
i
(T
i
czas zdwojenia).
Transmitancja idealnego regulatora PID ma następującą postać:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
=
i
d
r
PID
sT
sT
k
)
s
(
E
)
s
(
U
)
s
(
K
1
1
(1)
W regulatorach przemysłowych zamiast współczynnika wzmocnienia k
r
podaje się często
tzw. zakres proporcjonalności X
p
, wyrażony następująco:
%
k
X
r
p
100
1 ⋅
=
(2)
Laboratorium Podstaw Automatyki
Regulacja PID
- 2 -
Zakres proporcjonalności można rozumieć jako procentową część pełnego zakresu zmian
wielkości wejściowej
ε
, potrzebną do wywołania zmiany wielkości wyjściowej u o cały
zakres (tj. od 0% do 100%), przy założeniu, że operacje całkowania i różniczkowania są
wyłączone. Jest to jednocześnie największa wartość sygnału wejściowego regulatora
(uchybu) nie powodująca jeszcze wystąpienia stanu nasycenia w jego układzie wyjściowym,
tzn. regulator nie staje się elementem nieliniowym (nieproporcjonalnym).
Czas wyprzedzenia określa intensywność działania różniczkującego. Dzięki działaniu
różniczkującemu regulator może bardzo silnie reagować nawet na niewielkie, lecz szybkie
zmiany uchybu
ε
. W rezultacie przez odpowiednio silne oddziaływanie na wejście obiektu,
„uprzedza” spodziewany dalszy wzrost tego uchybu.
Czas zdwojenia określa intensywność działania całkującego. Nazwa „czas zdwojenia”
znajduje uzasadnienie na wykresie odpowiedzi skokowej regulatora PI (tzn. bez działania
różniczkującego, T
d
=0) – w chwili t=T
i
wartość sygnału na wyjściu jest równa podwójnej
amplitudzie skoku na wejściu. Dzięki działaniu całkującemu możliwe jest sprowadzenie
uchybu regulacji w stanie ustalonym do zera.
Szczegółowy opis regulatorów PID w wykonaniu przemysłowym zamieszczono w
instrukcji pt. „Badanie przemysłowego regulatora PID”.
3. Dobór rodzaju i parametrów regulatora PID
Prawidłowe działanie układu regulacji wymaga zastosowania trafnie dobranego regulatora
i właściwych wartości jego współczynników (w praktyce przemysłowej zwanych też
„nastawami”). Wymaga to znajomości, choćby przybliżonej, właściwości dynamicznych toru
złożonego z obiektu regulacji, elementu wykonawczego i układu pomiarowego.
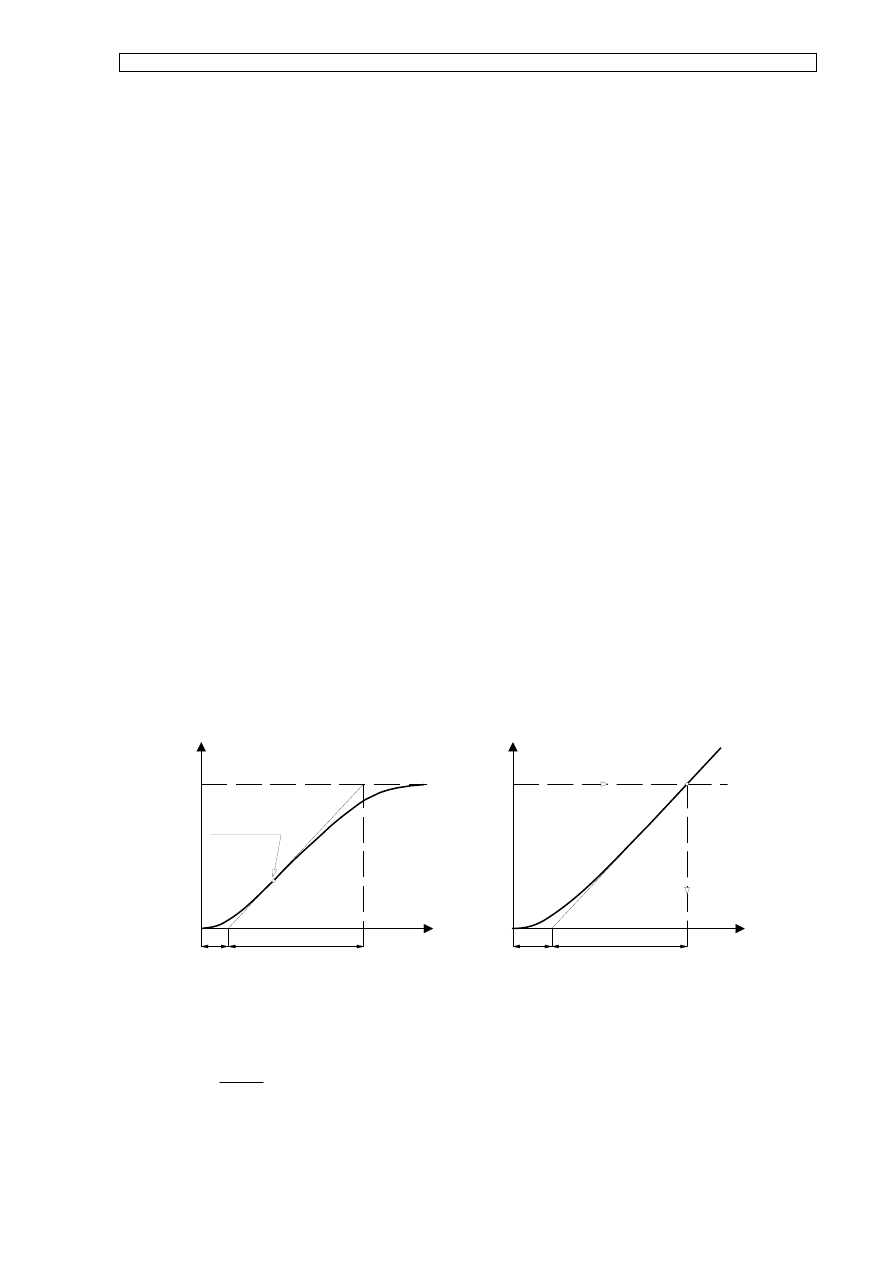
Modele dynamiczne najogólniej dzieli się na dwie grupy:
• statyczne (niecałkujące), dla których odpowiedź skokowa osiąga wartość ustaloną po
zaniku fazy przejściowej,
• astatyczne (całkujące), dla których odpowiedź skokowa nie osiąga wartości ustalonej.
Przykładowe (typowe) odpowiedzi skokowe pokazano na rysunku 2.
h(t)
t
T
τ
h
h(t)
t
T
τ
h(t)=A
a)
b)
punkt przegięcia
krzywej
ust
Rys. 2. Odpowiedzi obiektu statycznego (a) i astatycznego (b) na sygnał
skokowy o amplitudzie A.
Obiekty statyczne można w przybliżeniu opisać transmitancją
τ
s
st
e
sT
k
)
s
(
K
−
+
=
1
(3)
a obiekty astatyczne transmitancją
Laboratorium Podstaw Automatyki
Regulacja PID
- 3 -
τ
s
st
e
sT
)
s
(
K
−
=
1
(3)
gdzie k oznacza współczynnik wzmocnienia obiektu, T zastępczą stałą czasową, a
τ
zastępcze
opóźnienie. Należy zwrócić uwagę, że współczynniki te dotyczą modelu zastępczego dla
układu złożonego z elementu wykonawczego, obiektu regulacji i układu pomiarowego
połączonych łańcuchowo. Często przyjmuje się założenie, że układ pomiarowy jest
proporcjonalny o wzmocnieniu równym jedności. W praktyce założenie to można spełnić z
dużą dokładnością.
Na rysunku 2 pokazano także najprostszą graficzną metodę wyznaczania parametrów
podanych wyżej modeli. Bardziej zaawansowane metody omawiane są w ćwiczeniu
„Identyfikacja obiektów dynamicznych”.
Na podstawie rozważań teoretycznych, badań modelowych oraz doświadczeń
eksploatacyjnych opracowano wiele reguł nastawiania regulatora PID. Reguły te pozwalają
wyznaczyć parametry regulatora, na podstawie danych o pozostałych częściach układu
regulacji, tak, aby spełnić określone wymagania dotyczące przebiegu procesu regulacji.
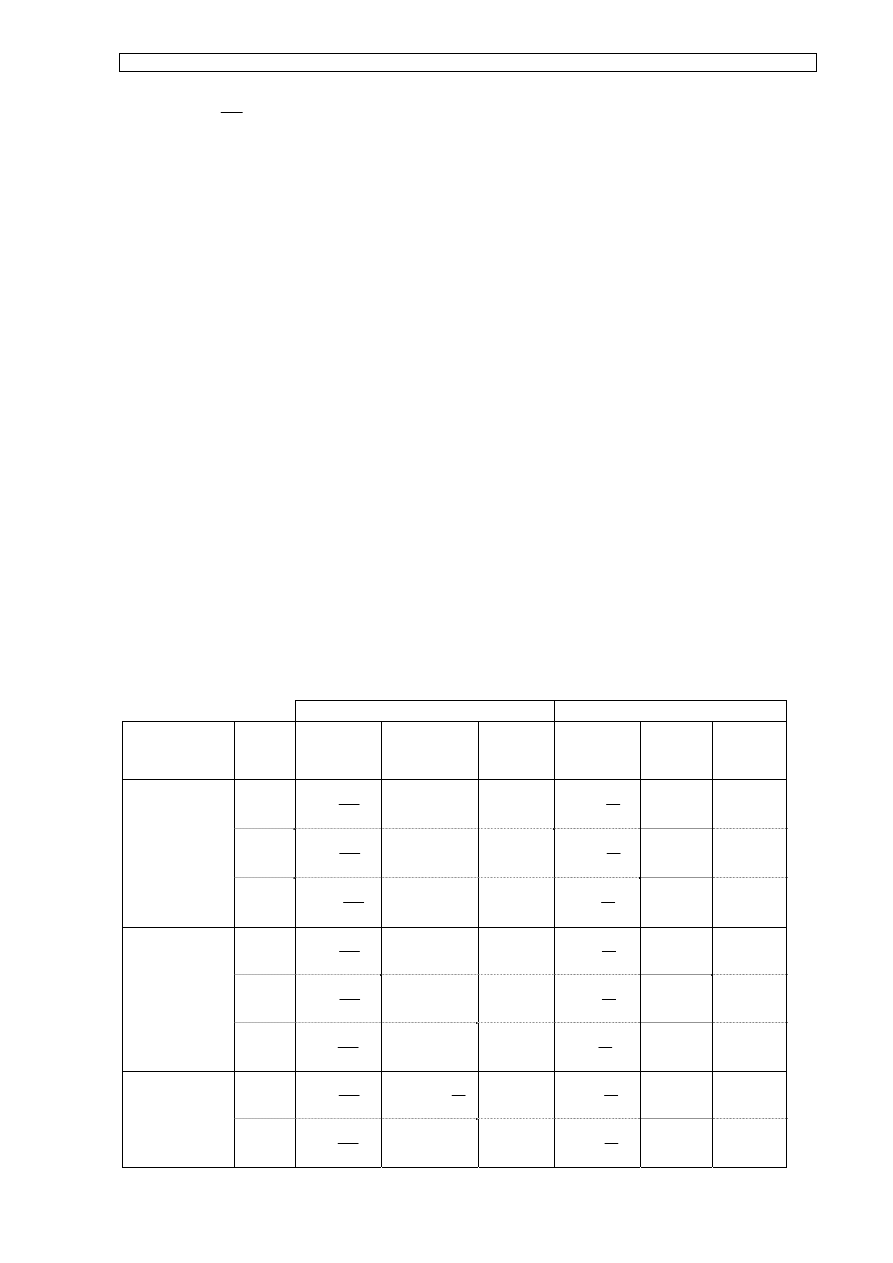
Najczęściej przyjmuje się jedno z następujących założeń dotyczących przebiegu
przejściowego regulacji dla skokowej zmiany wartości zadanej:
a) przebieg aperiodyczny i jednocześnie minimalny czas regulacji (osiągnięcia wartości
zadanej),
b) przebieg oscylacyjny, dopuszczalne przeregulowanie
Δy =20 % i minimalny czas
regulacji,
c) przebieg regulacji zapewniający minimum całki z kwadratu uchybu (∫
ε
2
(t)dt)=min) –
oznacza to minimalną ilość energii „zmarnowanej” w procesie dochodzenia do wartości
zadanej..
Reguły wyznaczania nastaw regulatora zapewniające spełnienie wyżej wymienionych założeń
podano w tabeli 1.
Tabela 1. Optymalne nastawy regulatora PID
Obiekty
statyczne
Obiekty
astatyczne
Rodzaj
przebiegu
przejściowego
Typ
k
r
T
i
T
d
k
r
T
i
T
d
P
τ
k
T
,3
0
-
-
τ
T
,37
0
-
-
PI
τ
k
T
,6
0
T
,
,
5
0
8
0
+
τ
-
τ
T
,46
0
τ
75
5,
-
Δy =0 %,
min(t
r
)
τ
4
2,
τ
4
0,
τ
T
,5
0
τ
5
τ
23
0,
τ
k
T
,95
0
PID
P
τ
k
T
,7
0
-
-
τ
T
,7
0
-
-
PI
τ
k
T
,7
0
T
,3
0
+
τ
-
τ
T
,7
0
τ
3
-
Δy =20 %,
min(t
r
)
τ
k
T
,2
1
τ
2
τ
4
0,
τ
T
,1
1
τ
2
τ
37
0,
PID
min(∫e
2
(t)dt)
P
τ
k
T
.0
1
τ
τ
T
,35
0
+
-
τ
T
,05
1
τ
3
4,
-
τ
k
T
,4
1
PI
τ
3
1,
τ
5
0,
τ
T
,37
1
τ
6
1,
τ
51
0,
Laboratorium Podstaw Automatyki
Regulacja PID
- 4 -
Nastawy regulatorów wyznaczone wg zależności podanych w tabeli 1 są optymalne w
przypadku układu regulacji stałowartościowej (y
z
=const). W przypadku regulacji nadążnej
(y
z
=f(t)) optymalne nastawy regulatora wyznacza się z innych zależności podawanych w
literaturze.
Opisana
wyżej metoda wyznaczania nastaw regulatora wymaga przeprowadzenia badania
obiektu w układzie otwartym. Istnieją również metody eksperymentalnego wyznaczania
nastaw regulatora PID po jego zainstalowaniu w zamkniętym układzie regulacji, bez
konieczności wyznaczania parametrów obiektu. Metoda opracowana przez Zieglera i
Nicholsa prowadzi do uzyskania przebiegu aperiodycznego z przeregulowaniem 20% i
minimalnym czasem regulacji. Sposób postępowania jest następujący:
1) Nastawić regulator na działanie proporcjonalne, wyłączając działanie całkujące (T
1
=
∞) i
różniczkujące (T
d
=0).
2) Zwiększać wzmocnienie regulatora k
r
aż do wystąpienia oscylacji niegasnących na
wyjściu obiektu
3) Zmierzyć okres tych oscylacji T
osc
, a na skali regulatora odczytać wzmocnienie krytyczne
k
kr
.
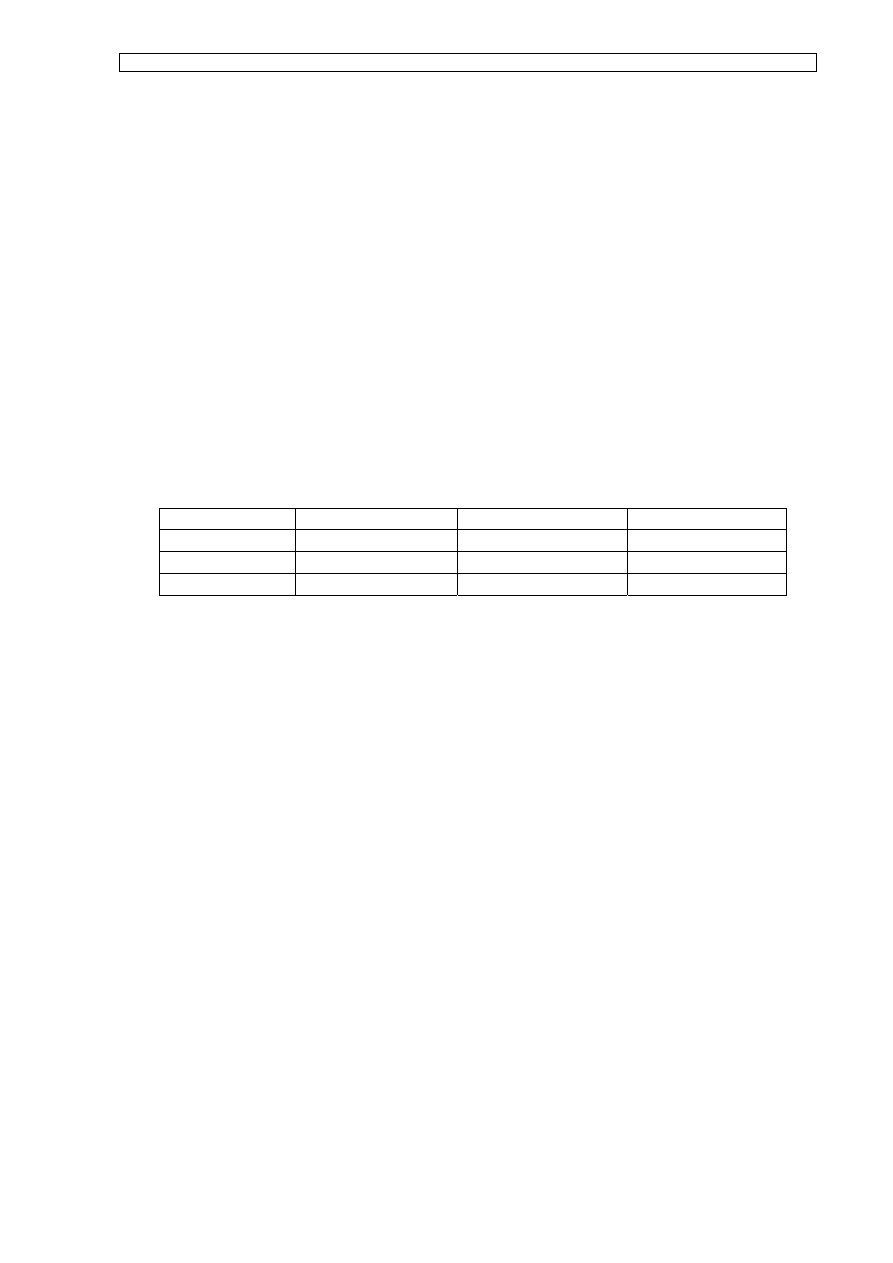
4) Przyjąć nastawy regulatora wg zależności podanych w tabeli 2.
Tabela 2. Optymalne nastawy regulatora PID wg metody Ziglera-Nicholsa.
Typ regulatora
k
r
T
i
T
d
P 0,5
k
kr
- -
PI 0,45
k
kr
0,85 T
osc
-
PID 0,6
k
kr
0,5 T
osc
0,12 T
osc
Stosowanie omówionej wyżej metody w praktyce nie zawsze jest dopuszczalne. Wynika to z
konieczności uzyskania oscylacyjnych zmian wielkości regulowanej, Przy czym amplituda
tych oscyjacji jest trudna do przewidzenia. Może to być niedopuszczalne w przypadku
stosowania układów regulacji w niektórych procesach technologicznych.
4. Opis badanego układu regulacji
4.1. Struktura układu
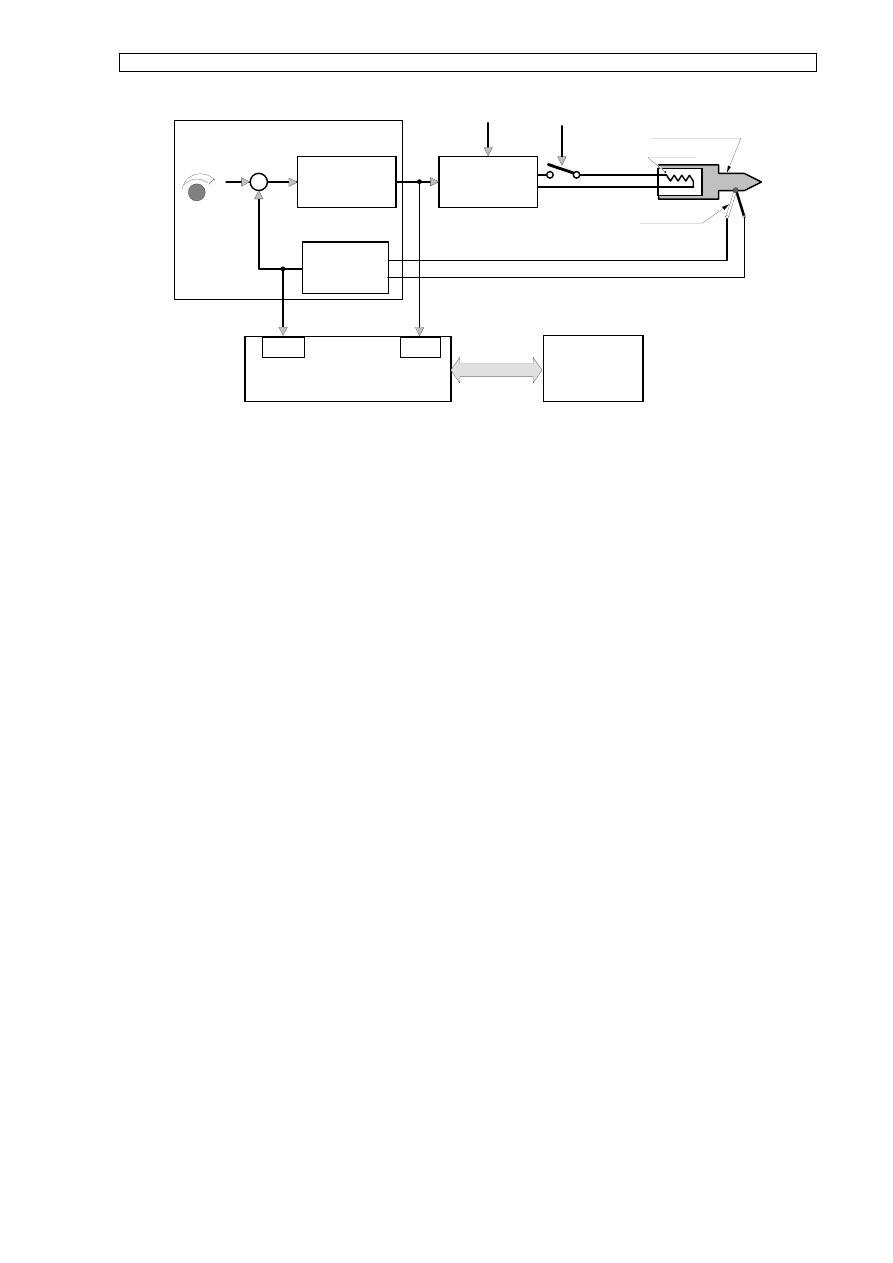
Układ regulacji badany w ćwiczeniu ma strukturę pokazaną na rys.1, a jego schemat
poglądowy pokazano na rysunku 3.
Wielkością regulowaną jest temperatura lutownicy. Parametry obiektu regulacji (warunki
wymiany ciepła z otoczeniem) można zmieniać przez włączenie bądź wyłączenie wentylatora
lub założenie dodatkowego radiatora na grzałkę lutownicy. Elementem wykonawczym,
dostarczającym moc do grzałki, jest sterowane źródło prądowe o wydajności proporcjonalnej
do sygnału sterowania U generowanego przez regulator przemysłowy ARP41. Chłodzenie
odbywa się poprzez wymianę ciepła z otoczeniem, co oznacza, że intensywność chłodzenia
nie jest sterowana przez element wykonawczy. Właściwości obiektu nie są zatem jednakowe
dla wzrostu temperatury i jej obniżania – obiekt nie jest liniowy.
Nastawianie
wartości zadanej wielkości regulowanej umieszczono w regulatorze. Również
tor pomiarowy wartości aktualnej wielkości mierzonej zawarto w regulatorze. Czujnik
pomiarowy, którym jest termopara typu J (Fe-Konst.), umieszczono na obudowie grzałki
lutownicy. Ze względu na pomijalnie małe stałe czasowe termopary i układu sterowanego
źródła prądowego, podane wcześniej założenie, że układ pomiarowy jest elementem
proporcjonalnym o wzmocnieniu równym 1 jest spełnione.
Laboratorium Podstaw Automatyki
Regulacja PID
- 5 -
+
_
Układ PID
źródło
prądowe
Układ
pomiarowy
ϑ
z
akt
U
ε
[%]
0
Sterowane
grot lutownicy
grzałka
termopara
ϑ
Rejestrator dwukanałowy
Komputer
RS232
We1
We2
Zasilanie
Regulator ARP41
100
Sterowanie
Rys. 3. Układ regulacji wykorzystywany w ćwiczeniu.
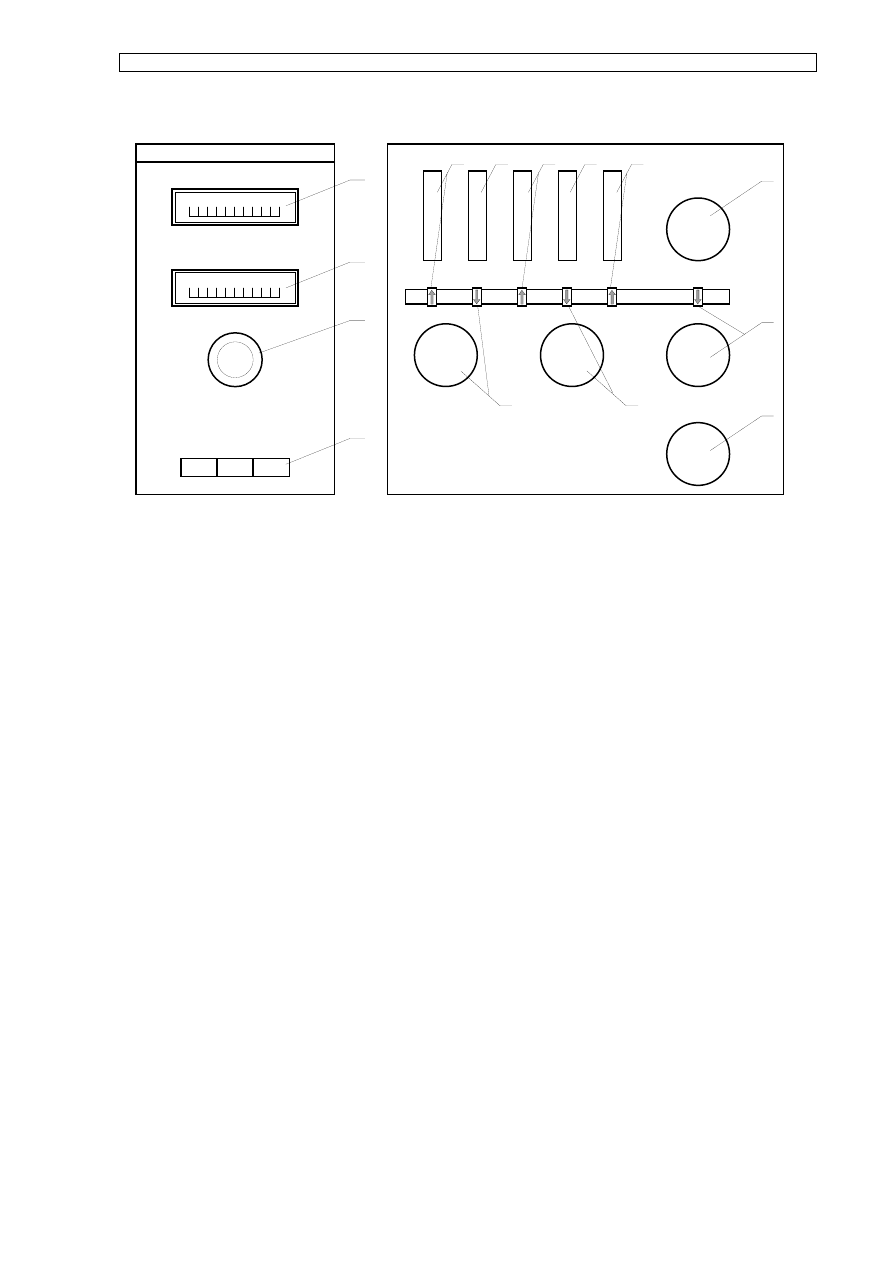
4.2. Regulator ARP41
Regulator ten zawiera układ elektroniczny realizujący przetwarzanie sygnału błędu wg
algorytmu PID. Parametry poszczególnych torów regulatora nastawiane są za pomocą zworek
i pokręteł umieszczonych na bocznej ściance, tak jak to pokazano na rys. 4b. W rezultacie na
wyjściu generowany jest sygnał prądowy 0..20 mA, odpowiadający sygnałowi sterowania u w
zakresie 0..100 %. Sygnały sterowania i błędu wskazywane są na wskaźnikach
umieszczonych na płycie czołowej regulatora (rys. 4a). Nastawianie wartości zadanej,
wyrażonej w procentach zakresu przetwarzania, odbywa się za pomocą wyskalowanego
pokrętła umieszczonego na płycie czołowej. Zakres nastaw X
p
=0..100 %. Parametry układu
wejściowego regulatora są tak dobrane, że jeżeli do wejścia regulatora podłączy się termoparę
typu J, to nastawiona wartość zadana odpowiada temperaturze zadanej wg zależności
ϑ
z
[°C]
= 4X
p
[%]. Maksymalna wartość temperatury zadanej może zatem wynosić 400°C.
Regulator przemysłowy ARP41 może realizować szereg dodatkowych funkcji, np.:
ograniczanie poziomu sygnału wyjściowego,
•
•
•
•
•
•
wprowadzenie strefy nieczułości dla uchybu,
ręczne nastawianie poziomu sygnału wyjściowego (sterowanie ręczne),
praca w trybie regulacji stałowartościowej lub nadążnej,
wprowadzanie dodatkowych sygnałów do węzła sumacyjnego (wejścia X2 i X3, 0..20
mA),
wprowadzanie wartości zadanej z zewnątrz (wejście Xz, 0..20 mA).
Funkcje te nie są wykorzystywane w ćwiczeniu.
Laboratorium Podstaw Automatyki
Regulacja PID
- 6 -
a)
b)
7
9
6
8
5
13
12
14
11
10
4
3
2
1
1 - wskaźnik wartości uchybu -50..+50 %
2 - wskaźnik sygnału wyjściowego 0..100 %
3 - potencjometr wartości zadanej 0..100 %
4 - przełączniki regulacji ręcznej
5, 6, 7 - wymienne wkładki standaryzujące
dla poszczególnych wejść
8, 9 - wymienne kodery do nastawiania
wzmocnienia dla wejść X2 i X3
10 - potencjometr i zworka nastawy zakresu
proporcjonalności, 3..50 %, ×1, ×10
11 - potencjometr i zworka nastawy czasu
zdwojenia, 0,1..3 min, ×1, ×10, ×
12 - potencjometr i zworka nastawy czasu
wyprzedzenia 0,1...1 min, ×0, ×0,1, ×1, ×10
13, 14 - potencjometry nastawy poziomu
ograniczenia i strefy nieczułości
∞
_
+
A/R
X
ARP 41
-50 0 50
0 100
Rys. 4. Rozmieszczenie elementów na płycie czołowej i ścianie bocznej regulatora ARP41
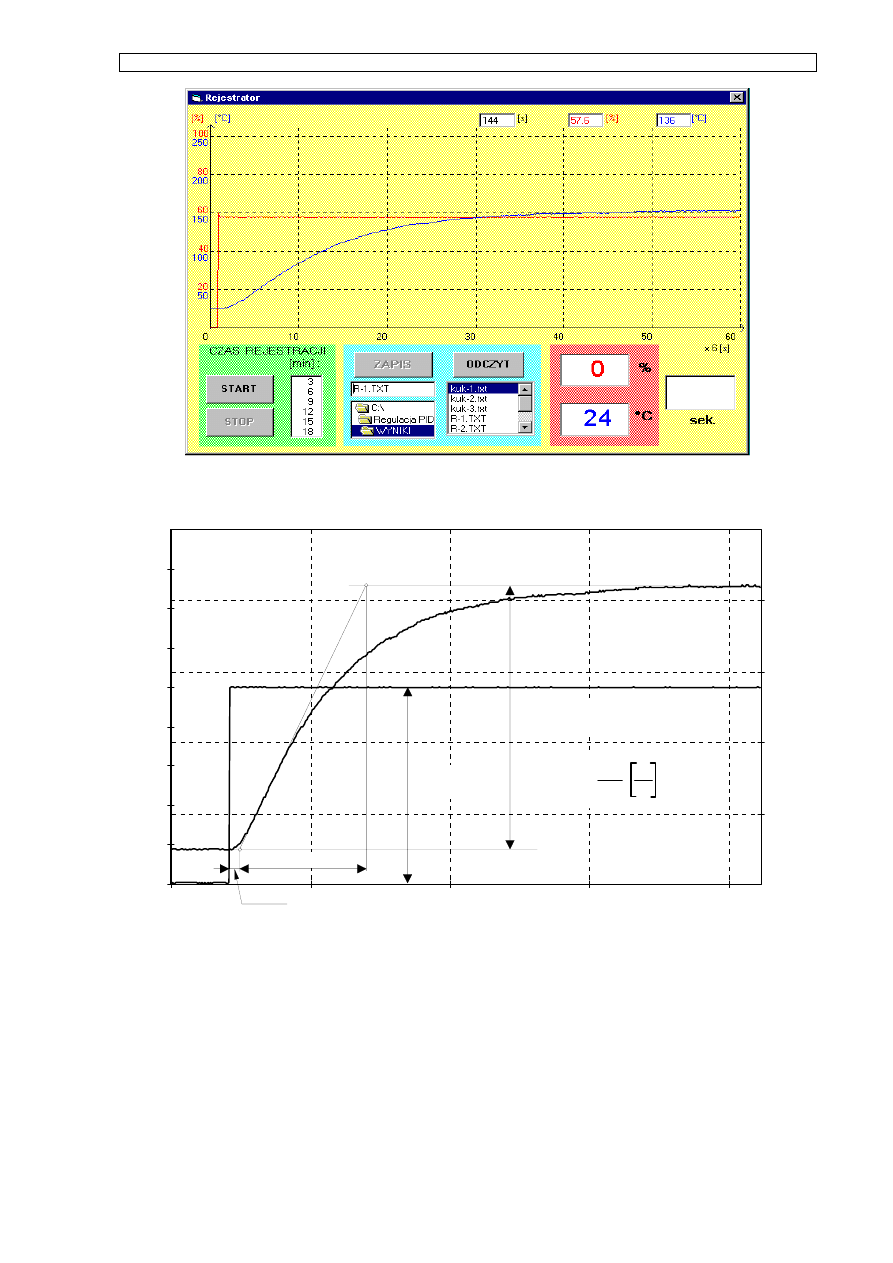
4.3. Rejestracja przebiegu procesu regulacji
Wyznaczenie parametrów obiektu oraz weryfikacja poprawności doboru typu regulatora i
jego nastaw wymaga rejestracji przebiegów czasowych wielkości regulowanej oraz wielkości
sterującej na wyjściu regulatora. Przebieg zmian tych wielkości może być rejestrowany w
systemie komputerowym. Zakres czasu rejestracji można deklarować w granicach od 6 do 36
min. Na ekranie komputera (rys. 5) wyświetlane są na bieżąco oba przebiegi, a ponadto dane
zapisywane są do pliku wskazanego przez operatora. Tekstowy format danych w tym pliku
umożliwia późniejsze ich wykorzystanie do opracowania sprawozdania przy użyciu
dowolnego programu, np. Excel, MathCad, Grafer.
Program rejestratora umożliwia również wykreślanie na ekranie linii stycznych do przebiegu
w dowolnym punkcie (przez naciśnięcie lewego przycisku myszy) oraz linii równoległych do
osi czasu (prawy przycisk myszy). W odpowiednich okienkach wyświetlane są wartości
zarejestrowanych przebiegów odpowiadające położeniu kursora myszy na ekranie. Powyższe
funkcje pozwalają na odczyt z ekranu przybliżonych wartości parametrów modelu (3) lub (4).
Sposób wyznaczania tych parametrów zilustrowany jest na rysunku 6.
Laboratorium Podstaw Automatyki
Regulacja PID
- 7 -
Rys. 5. Ekran programu rejestracji przebiegu procesu regulacji.
0
10
20
30
40
50
60
70
U
0
90
180
270
0
50
100
150
200
[°C]
[%]
= 81 s
τ = 7 s
Δϑ = 186 °C
Δ
= 50 %
ϑ
U
T
t
[s]
Δϑ
Δ U
k =
%
°C
Rys. 6. Wyznaczanie parametrów obiektu na podstawie wykresu odpowiedzi skokowej
5. Program ćwiczenia
5.1. Wyznaczanie parametrów obiektu
Nastawy regulatora wyznaczane są na podstawie parametrów obiektu odczytanych z jego
odpowiedzi skokowej.
W celu zarejestrowania odpowiedzi skokowej obiektu należy przełączyć regulator w tryb
pracy ręcznej (przycisk środkowy z grupy 4 na rys. 4a), a następnie przyciskami „+” i „-”
nastawić pożądaną wartość sygnału sterowania. Należy zarejestrować odpowiedzi skokowe

Laboratorium Podstaw Automatyki
Regulacja PID
- 8 -
dla dwu wartości sygnału sterowania np. 20 i 50%, zarówno dla skoku „w górę”, jak i „w
dół”. Nie należy nastawiać sygnału sterowania na wartość stale przekraczającą 60 %,
ponieważ prowadzi to do przekroczenia dopuszczalnej temperatury.
Skokową zmianę sygnału sterującego można uzyskać za pomocą wyłącznika „Sterowanie”
(rys. 3) umieszczonego na wyjściu sterowanego źródła prądowego. Należy zwrócić uwagę na
prawidłowe dobranie czasu rejestracji, tak aby osiągnąć temperaturę ustaloną.
Na podstawie jednego z przebiegów wyznaczyć parametry obiektu. Wyznaczone parametry
wykorzystać do wyznaczenia nastaw regulatora posługując się zależnościami podanymi w
tabeli 1, zakładając różne typy regulatorów i rodzaje przebiegu przejściowego.
W sprawozdaniu należy dodatkowo wyznaczyć parametry obiektu na podstawie
pozostałych zarejestrowanych przebiegów odpowiedzi skokowej. Porównać otrzymane
wartości i skomentować różnice.
5.2. Regulacja automatyczna
Przeprowadzić rejestrację przebiegu procesu regulacji automatycznej dla różnych
rodzajów regulatorów (P, PI, PID) o parametrach wyznaczonych w poprzednim punkcie.
Należy zaobserwować zachowanie się układu w przypadkach:
• skokowej zmiany wartości zadanej zarówno w góę jak i w dół (np. 10→40 % i
40
→10%); wartość zadaną można zmieniać za pomocą potencjometru 3 (rys. 4a) na
płycie czołowej regulatora,
• zmiany parametrów obiektu (praca z wentylatorem załączonym na stałe, założonym
dodatkowym radiatorem)
• zakłócenia wywołanego zmianą parametrów chłodzenia (włączenie/wyłączenie
wentylatora), w sytuacji, gdy układ osiągnął uprzednio stan ustalony,
W sprawozdaniu należy skomentować uzyskane przebiegi procesu regulacji, wyznaczyć
wartości wskaźników regulacji (np. czas ustalania, suma modułów błędu regulacji w stanie
przejściowym) oraz sformułować wnioski dotyczące skuteczności stosowanych metod doboru
nastaw regulatora PID.
Pytania kontrolne
1. Jaka jest podstawowa struktura zamkniętego układu regulacji?
2. Omów role poszczególnych elementów w układzie.
3. Omów działanie badanego w ćwiczeniu układu regulacji.
4. Jakie kryteria uwzględnia się przy projektowaniu regulatorów?
5. Omów działanie regulatora PID.
6. Podaj dwa podstawowe modele obiektów użyteczne przy doborze nastaw regulatorów.
7. Jak wyznacza się parametry tych modeli?
8. Czy uzyskane parametry modelu obiektu badanego w ćwiczeniu mogą zależeć od sposobu
ich wyznaczenia? Dlaczego?
9. Omów metody doboru nastaw regulatora PID.
10. Jak ocenić jakość procesu regulacji?
(HUk); plik: REG_PID_27-01.DOC
Document Outline
Wyszukiwarka
Podobne podstrony:
1 PM PPASPA Pid 9555 Nieznany (2)
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
~lock PID
pid gotowe
Zasada Dzialania PID
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
04Nastawy regulatora PID
pid
PID
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
PID 8 11 2015
Badanie układu sterowania z regulatorem PID
Regulator PID Cool
Regulator PID (2)
DOBÓR NASTAW REGULATORA PID
pid lab
PID
PID-A
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
więcej podobnych podstron