od czasu do czasu lubię się trochę zrelaksować
podczas różniczkowania i całkowania
dr inż. Jacek JACKIEWICZ
L I T E R A T U R A
Literatura podstawowa
[1] Gutowski R.: Mechanika analityczna. PWN, Warszawa, 1971.
[2]
Jarzębowska E.: Mechanika analityczna. Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa, 2003.
[3]
Sawiak S., Wittbrodt E.: Mechanika ogólna, Wybrane zagadnienia -
teoria i zadania. Wydawnictwo Politechniki Gdańskiej, Gdańsk,
2007.
[4]
Nizioł J.: Metodyka rozwiązywania zadań z mechaniki, Część III:
Dynamika. WNT, Warszawa, 2009.
2
L I T E R A T U R A
Literatura uzupełniająca
[1]
Gelfand I. M., Fomin S. W.: Rachunek wariacyjny. PWN, Warszawa,
1975.
[2]
Borkowski Sz.: Mechanika ogólna, Tom 3: Dynamika Lagrange’a i
Hamiltona. Wydawnictwo Politechniki Śląskiej, Gliwice, 1998.
[3]
Leyko J.: Mechanika ogólna, Tom 2: Dynamika. Wydawnictwo
Naukowe PWN, Warszawa, 2010.
[4]
Jakowluk A.: Mechanika analityczna - Dynamika maszyn i robotów,
Tom III: Mechanika teoretyczna i podstawy teorii mechanizmów i
robotów. Wydawnictwo Politechniki Białostockiej, Białystok, 1994.
[5]
Szcześniak W.E.: Dynamika analityczna i "MATHEMATICA" w
zadaniach i przykładach obliczeniowych. Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa, 2010.
3
WPROWADZENIE
4
Celem nauczania przedmiotu mechanika analityczna jest nabycie umiejętności
Celem nauczania przedmiotu mechanika analityczna jest nabycie umiejętności
korzystania z metod rachunku wariacyjnego, które mogą być z powodzeniem
korzystania z metod rachunku wariacyjnego, które mogą być z powodzeniem
stosowane do opisu modeli ciągłych. W podręcznikach z mechaniki klasycznej,
stosowane do opisu modeli ciągłych. W podręcznikach z mechaniki klasycznej,
wykorzystywanych podczas studiów pierwszego stopnia, układ rzeczywisty jest
wykorzystywanych podczas studiów pierwszego stopnia, układ rzeczywisty jest
reprezentowany tylko za pomocą modeli dyskretnych, tj. punktu materialnego, bryły
reprezentowany tylko za pomocą modeli dyskretnych, tj. punktu materialnego, bryły
sztywnej lub skończonej kombinacji punktów materialnych i/lub brył sztywnych, co
sztywnej lub skończonej kombinacji punktów materialnych i/lub brył sztywnych, co
stanowi istotne ograniczenie możliwości przeprowadzania odpowiednich analiz
stanowi istotne ograniczenie możliwości przeprowadzania odpowiednich analiz
wytrzymałościowych i dynamicznych elementów konstrukcji maszyn, gdy powinny
wytrzymałościowych i dynamicznych elementów konstrukcji maszyn, gdy powinny
być one rozpatrywane jako układy ciągłe, a nie jako układy prętowe.
być one rozpatrywane jako układy ciągłe, a nie jako układy prętowe.
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
5
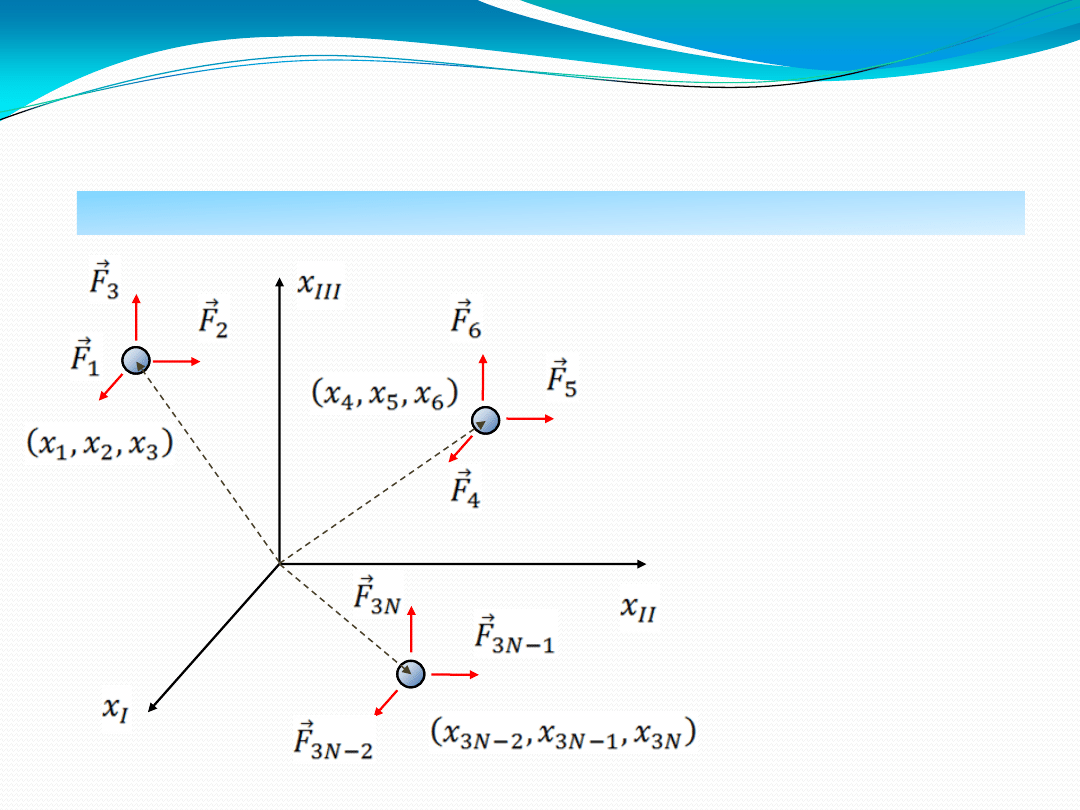
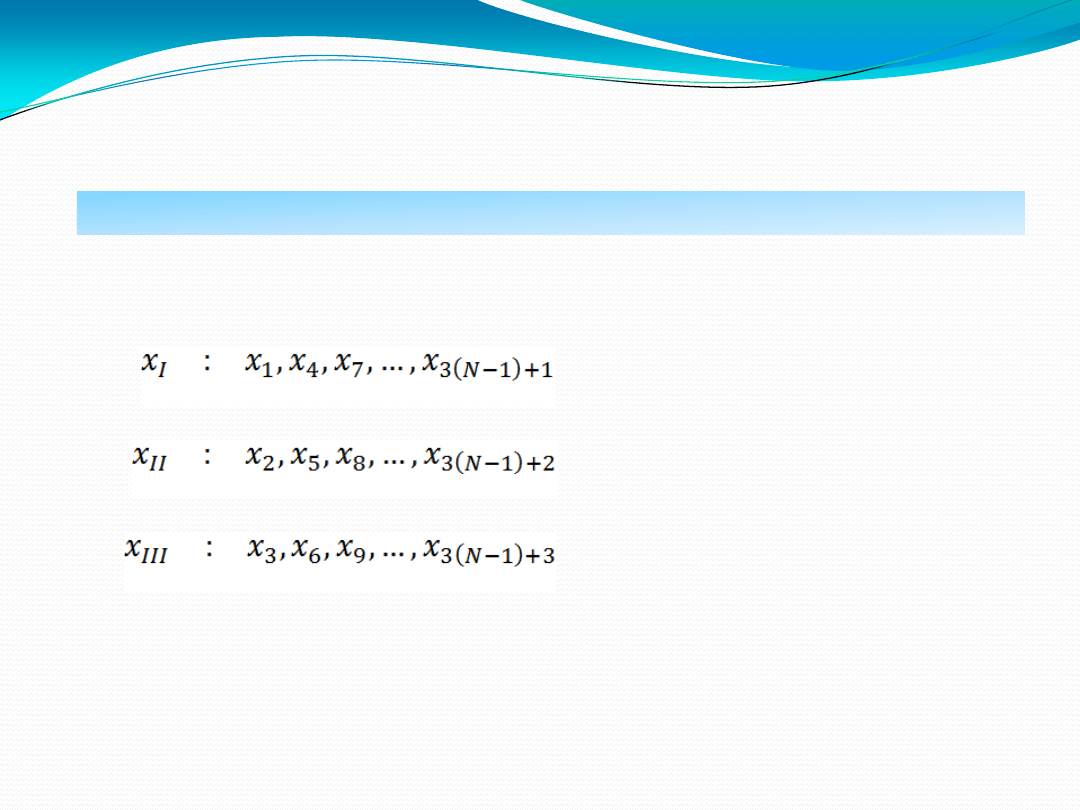
układ N punktów materialnych,
których położenie jest określone
za pomocą współrzędnych
na każdy punkt działa siła zewnętrzna
o 3 składowych
6
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
7
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
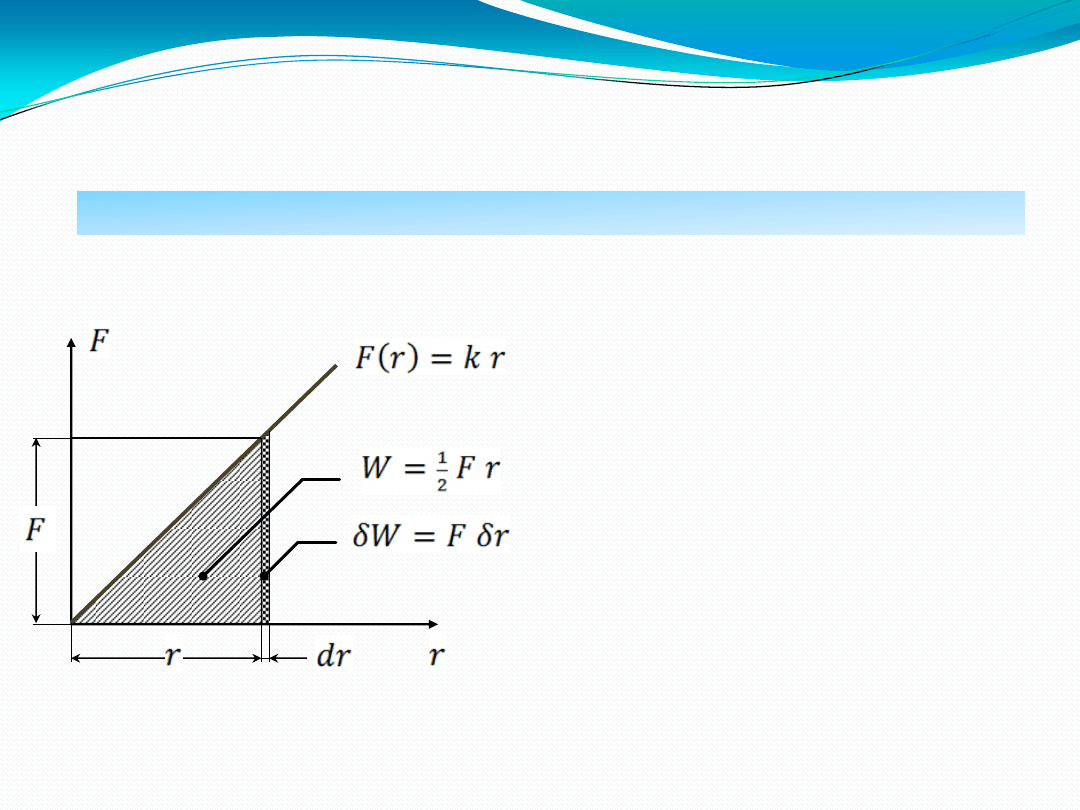
Układ Clapeyrona charakteryzuje się tym,
że zależności dla sił są liniowe.
Zachodzi to wtedy, gdy materiał jest
liniowo-sprężysty.
W trakcie odkształcania tego układu nie
zmieniają się warunki podparcia, gdy nie
ma naprężeń i odkształceń wstępnych
oraz zmian temperatury.
8
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
PRZEMIESZCZENIE WIRTUALNE
PRZEMIESZCZENIE WIRTUALNE
Przyjmujemy dowolnie małe przemieszczenia,
nazywane przemieszczeniami wirtualnymi.
Przemieszczenia wirtualne nie są zależne od czasu.
Na drodze przemieszczeń wirtualnych siły zewnętrzne
nie zmieniają swojej wartości.
Przyjęto następujące oznaczenie przemieszczenia wirtualnego:
( a nie ).
9
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
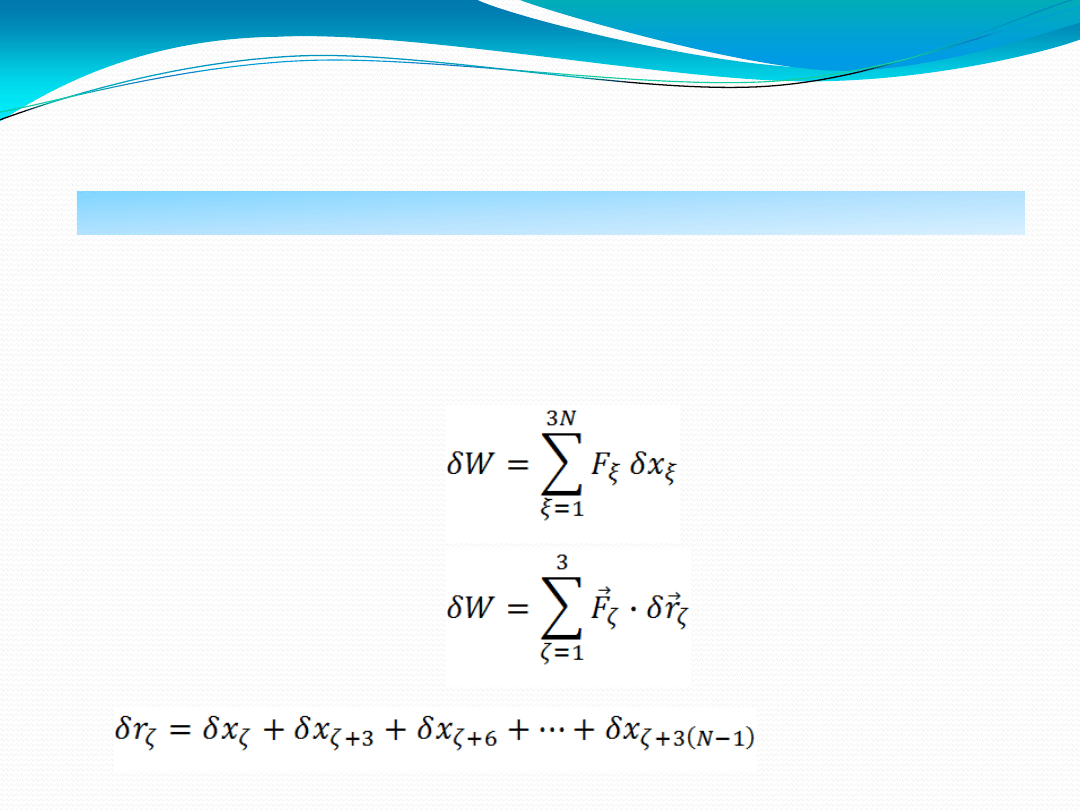
PRACA WIRTUALNA
PRACA WIRTUALNA
postać skalarna
postać skalarna::
praca wykonana przez wszystkie siły zewnętrzne danego układu:
praca wykonana przez wszystkie siły zewnętrzne danego układu:
postać wektorowa
postać wektorowa::
10
WPROWADZENIE – PODSTAWOWE POJĘCIA
przemieszczenie wirtualne
przemieszczenie wirtualne
• pomyślane,
• możliwe (kinematycznie dopuszczalne),
• niezależne od czynników zewnętrznych (np. obciążeń),
• bardzo małe w porównaniu z wymiarami ciała,
• niezależne od czasu,
• ciągłe (co najmniej raz różniczkowalne).
11
WPROWADZENIE – PODSTAWOWE POJĘCIA
obciążenie wirtualne
obciążenie wirtualne
• pomyślane,
• możliwe,
• niezależne od czynników zewnętrznych,
• bardzo małe w odniesieniu do obciążeń zewnętrznych,
• niezależne od czasu,
• nie musi być ciągłe.
12
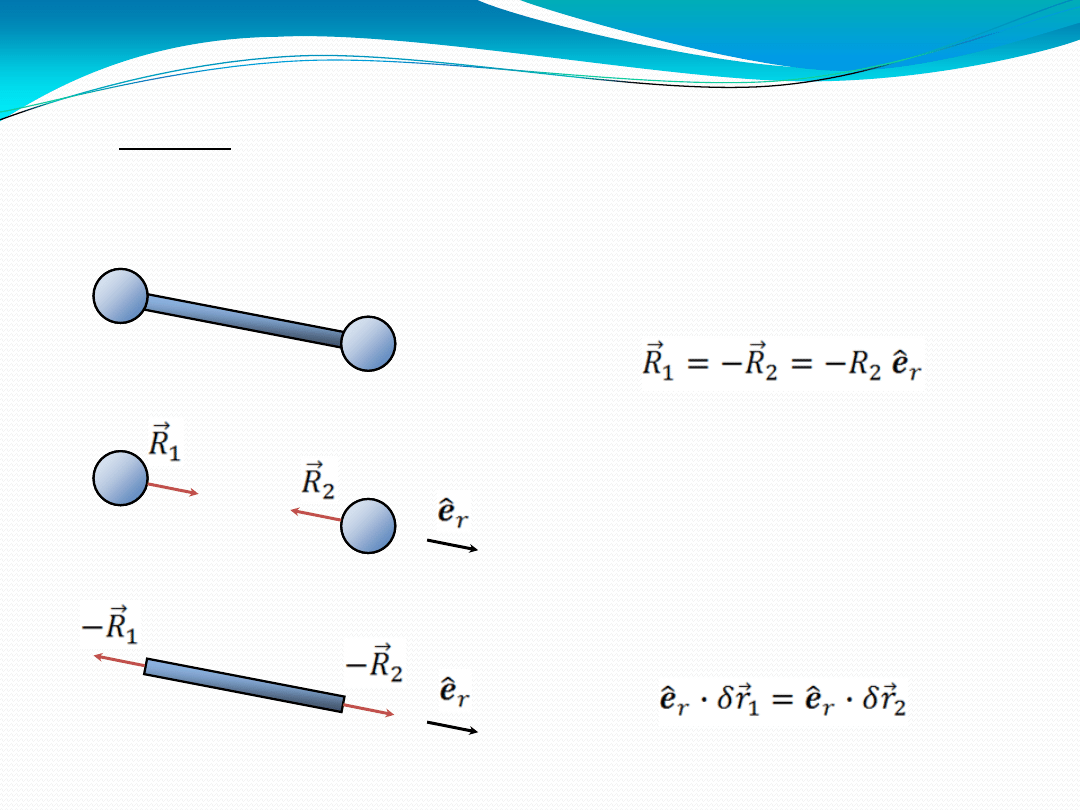
Przykład
Przykład::
Dwie masy połączone za pomocą sztywnego pręta
Dwie masy połączone za pomocą sztywnego pręta
(więź elementarna)
(więź elementarna)
1 aksjomat statyki, reakcje więzów:
1 aksjomat statyki, reakcje więzów:
Ponieważ wartości sił
Ponieważ wartości sił RR
11
i i RR
22
są równe,
są równe,
to
to
odpowiadające
odpowiadające
tym siłom
tym siłom
składowe przemieszczeń wirtualnych
składowe przemieszczeń wirtualnych
też muszą być odpowiednio równe:
też muszą być odpowiednio równe:
13
Przykład
Przykład::
Dwie masy połączone za pomocą sztywnego pręta
Dwie masy połączone za pomocą sztywnego pręta
(więź elementarna)
(więź elementarna)
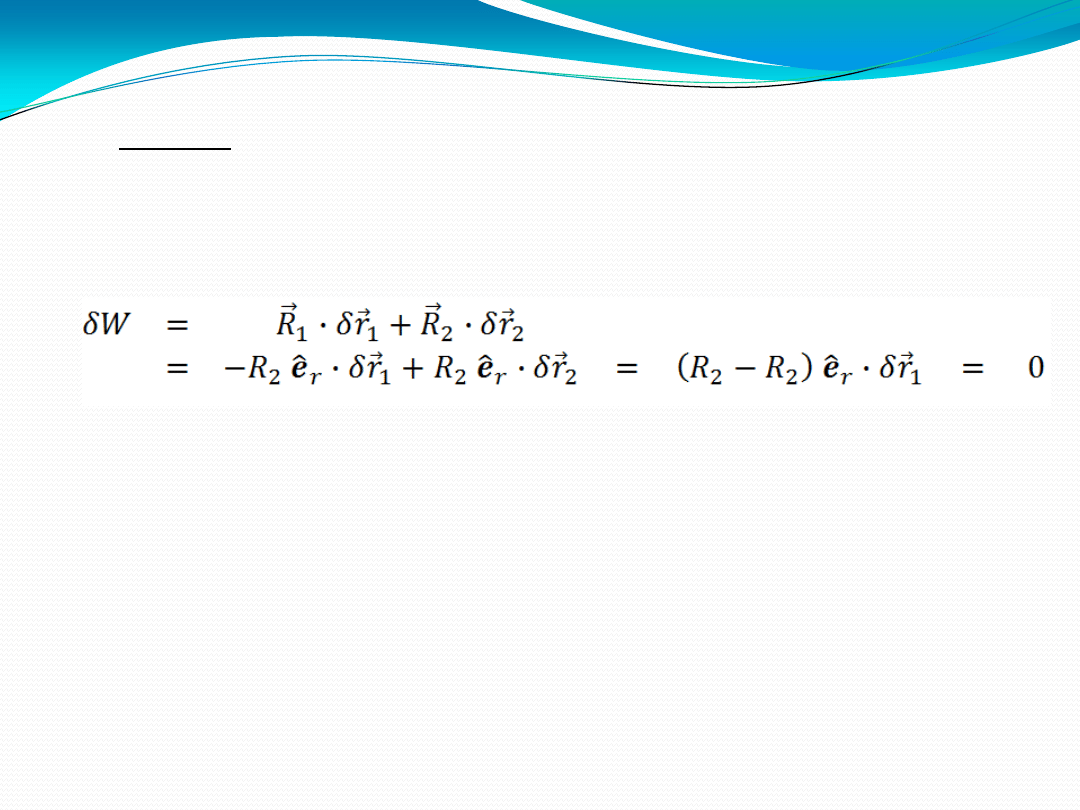
praca wirtualna reakcji więzów więzi elementarnej
praca wirtualna reakcji więzów więzi elementarnej
Ciało sztywne jest zbiorem punktów materialnych obdarzonych masą, które są
Ciało sztywne jest zbiorem punktów materialnych obdarzonych masą, które są
utrzymywane w ustalonych (niezmiennych) odległościach pomiędzy sobą.
utrzymywane w ustalonych (niezmiennych) odległościach pomiędzy sobą.
wniosek
wniosek
Praca wirtualna wykonana przez siły wewnętrzne ciała sztywnego jest równa zeru.
Praca wirtualna wykonana przez siły wewnętrzne ciała sztywnego jest równa zeru.
14
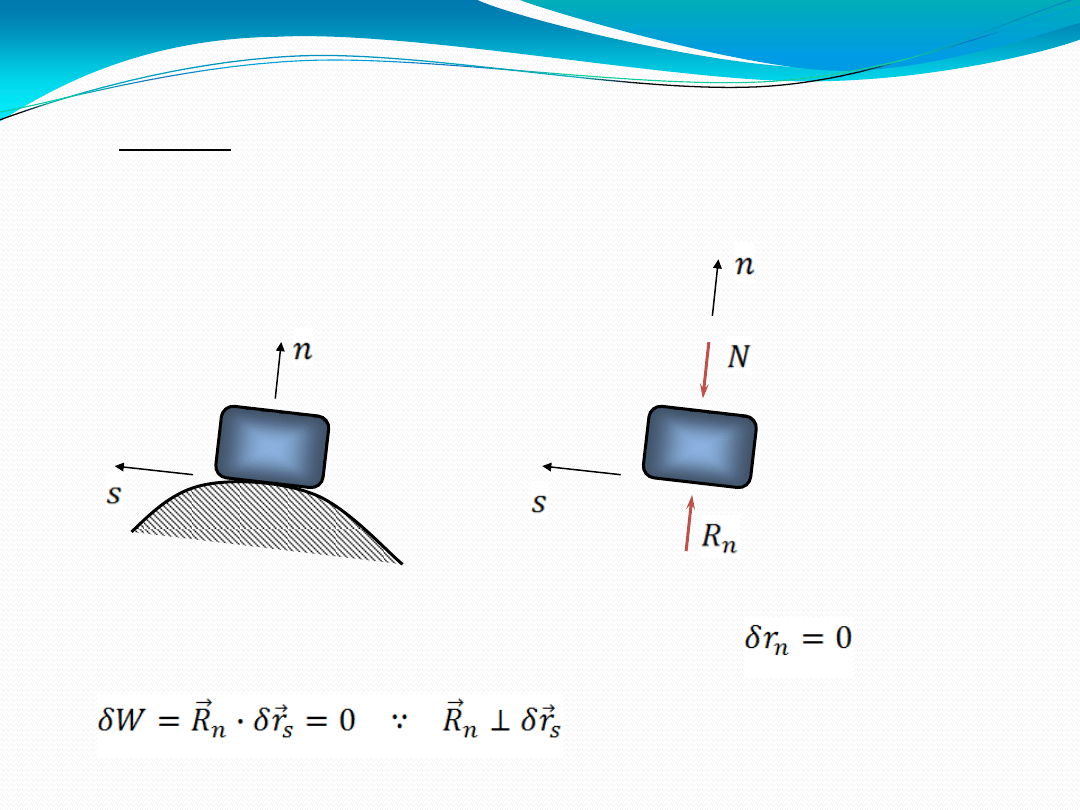
Przykład
Przykład::
Ciało ślizgające się po gładkiej, sztywnej powierzchni
Ciało ślizgające się po gładkiej, sztywnej powierzchni
(bez tarcia)
(bez tarcia)
powierzchnia zewnętrzna jest sztywna i ustalona:
przemieszczenie spełniające warunki
utwierdzeń jest prostopadłe do reakcji
więzów
15
WPROWADZENIE – PODSTAWOWE POJĘCIA
Przemieszczenia wirtualne mszą spełniać warunki więzów.
W układach idealnych (bez tarcia) reakcje nie wykonują pracy.
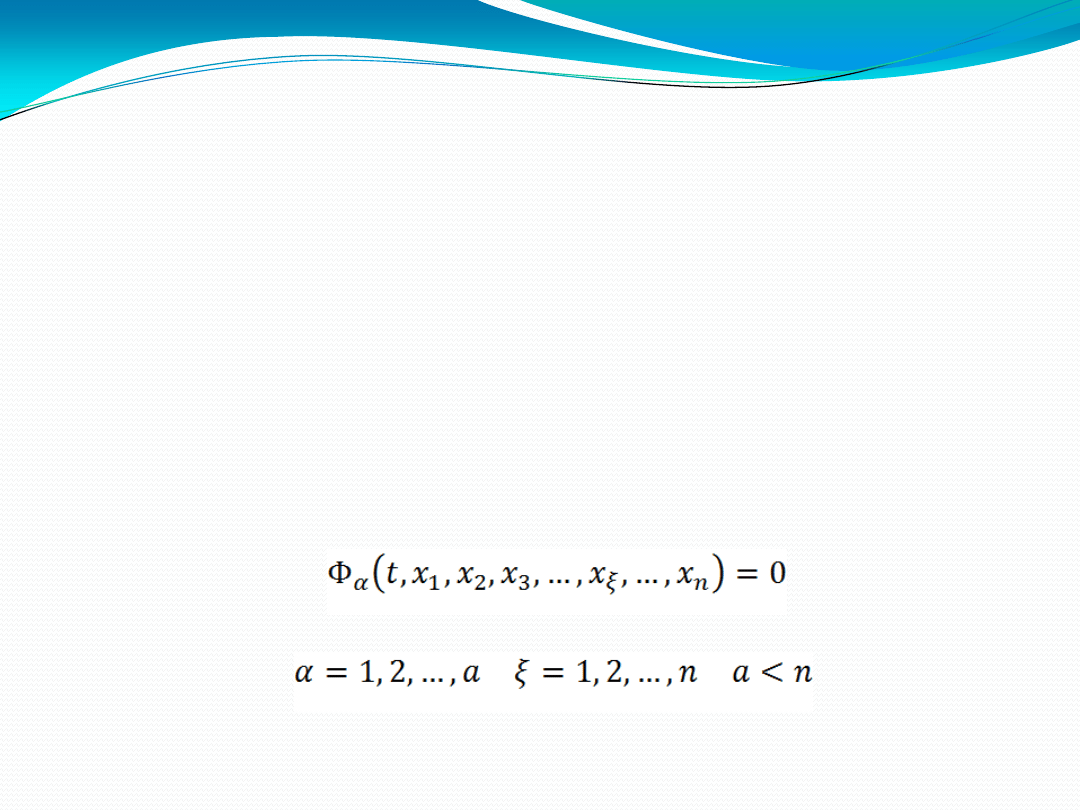
Więzy geometryczne nakładają ograniczenia na współrzędne położenia
poszczególnych elementów danego układu.
więzy geometryczne
więzy geometryczne
16
WPROWADZENIE – PODSTAWOWE POJĘCIA
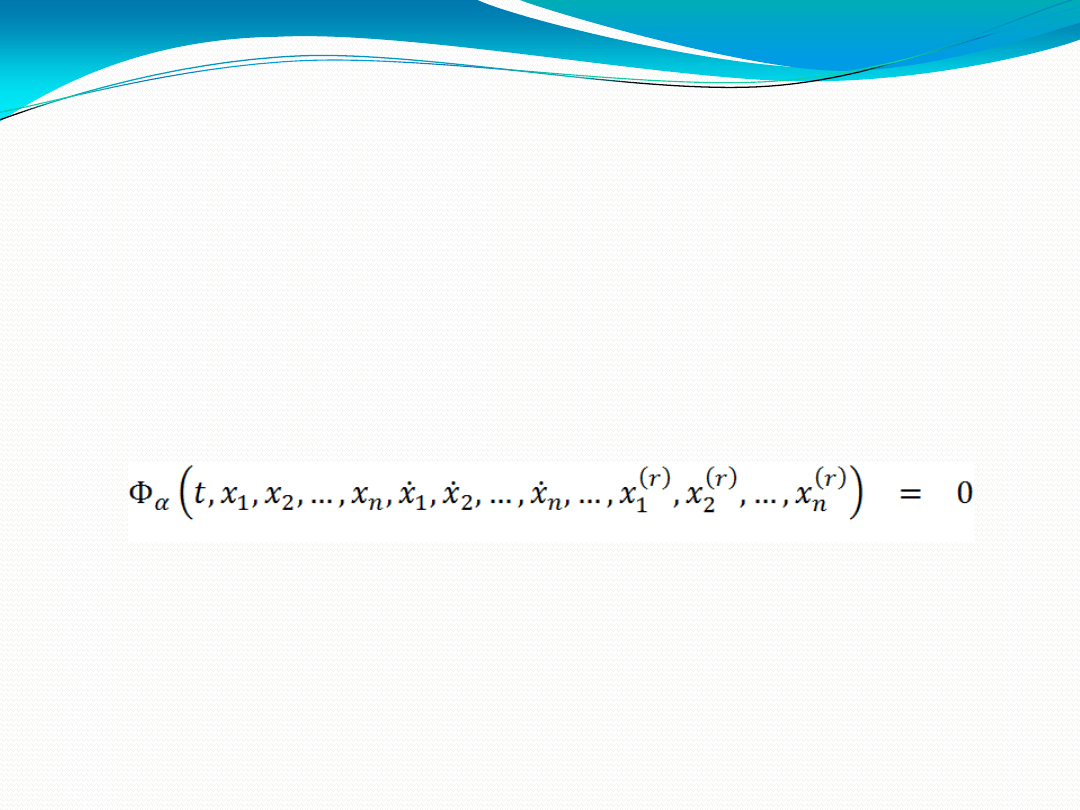
Więzy kinematyczne nakładają ograniczenia na składowe prędkości i/lub
przyspieszeń, a także ograniczenia na rodzaj zmian prędkości i/lub
przyspieszeń.
więzy kinematyczne
więzy kinematyczne
Jeżeli równania różniczkowe tego typu więzów można efektywnie scałkować
to nazywamy je holonomicznymi, gdy nie - to wówczas nieholonomicznymi.
17
WPROWADZENIE – PODSTAWOWE POJĘCIA
podział więzów
podział więzów
skleronomiczne – nie zależą jawnie od czasu,
reonomiczne – jawnie zależą od czasu.
oznaczenia
oznaczenia
wypadkowa zewnętrznych sił biernych działających na i-ty punkt
materialny układu
wypadkowa zewnętrznych sił czynnych działających na i-ty punkt
materialny układu
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
18
równowaga statyczna
równowaga statyczna
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
19
Warunkiem koniecznym i wystarczającym równowagi skleronomicznego układu
punktów materialnych (który w stanie początkowym znajduje się w bezruchu i
jest poddany działaniu wzajemnych, obustronnych oddziaływań w postaci sił
wewnętrznych tego układu nie wykonujących pracy) jest zerowa praca wirtualna
sił zewnętrznych (czynnych i biernych), działających na rozpatrywany układ,
wzdłuż drogi dowolnych przemieszczeń wirtualnych spełniających warunki
więzów.
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
20
Odwołując się do zasady d’Alemberta:
która sprowadza zagadnienia dynamiki do szczególnych problemów statyki
otrzymujemy
WPROWADZENIE – PODSTAWOWE POJĘCIA
ZASADA PRAC PRZYGOTOWANYCH
21
Warunkiem koniecznym i wystarczającym równowagi układu materialnego jest,
aby suma prac wirtualnych wszystkich sił czynnych i reakcji więzów przy
dowolnym przemieszczeniu wirtualnym układu była równa zeru.
Warunkiem koniecznym i wystarczającym równowagi układu materialnego o
więzach idealnych jest, aby suma prac wirtualnych wszystkich sił czynnych przy
dowolnym przemieszczeniu wirtualnym układu była równa zeru.
22
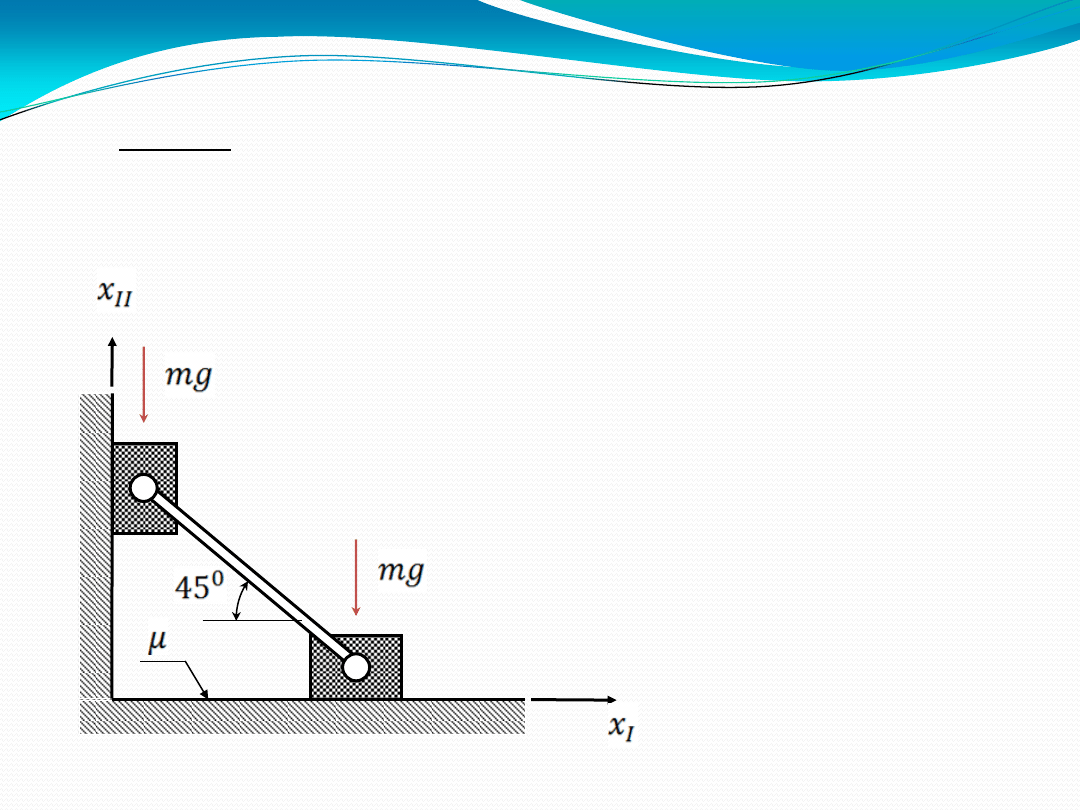
Przykład
Przykład::
Znajdujący się w równowadze układ mechaniczny
Znajdujący się w równowadze układ mechaniczny
składa się z dwóch mas połączonych ze sobą za
składa się z dwóch mas połączonych ze sobą za
pomocą sztywnego, nieważkiego pręta. Należy
pomocą sztywnego, nieważkiego pręta. Należy
określić współczynnik tarcia dolnej masy o
określić współczynnik tarcia dolnej masy o
chropowatą podłogę (pionowa ściana jest gładka).
chropowatą podłogę (pionowa ściana jest gładka).
Wyszukiwarka
Podobne podstrony:
Koła 2010, pwr, air, semestr 3, Mechanika analityczna, KOŁO ĆWICZENIA (matek sp)
Mechanika analityczna program zajec id 290745
03 Równania kanoniczne, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
tchoń,mechanika analityczna,MECHANIKA HAMILTONOWSKA
Mechanika analityczna id 290740 Nieznany
mechanika analityczna
Mechanika Analityczna, Semestr 1, mechanika
04 Teoria sterowania, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
Mechanika analityczna dzidkowski hamilton 2
Mechanika Analityczna Teoria
mechanika analityczna
Mechanika analityczna material cwiczeniowy (Zastosowa
Mechanika Analityczna 20.06.08r., Semestr 1, mechanika
01 Elementy rachunku wariacyjnego, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
sciaga anal, PWr Mechaniczny [MBM], Semestr 8, Mechanika analityczna, WYKŁAD, Mechanika analityczna
Mechanika analityczna material cwiczeniowy id 290743
mechanika analityczna wprowadzenie
02 Więzy, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
tchoń,mechanika analityczna,TWIERDZENIA
więcej podobnych podstron