Prof. Edmund Wittbrodt
ELEMENTY MECHANIKI ANALITYCZNEJ
Rozpatrujemy układ o wielu stopniach swobody, np. układ złożony z p punktów materialnych. Na układ mogą być
nałożone więzy.
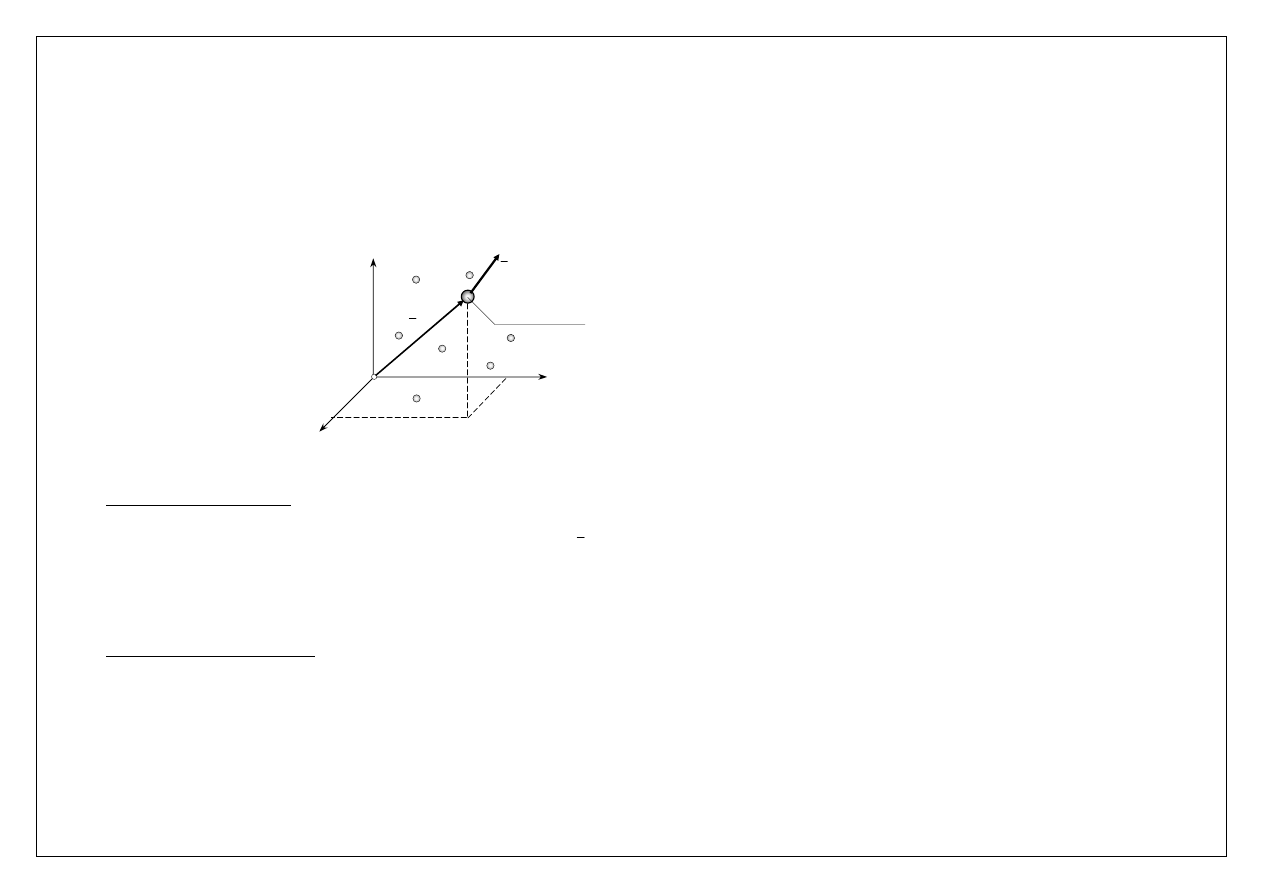
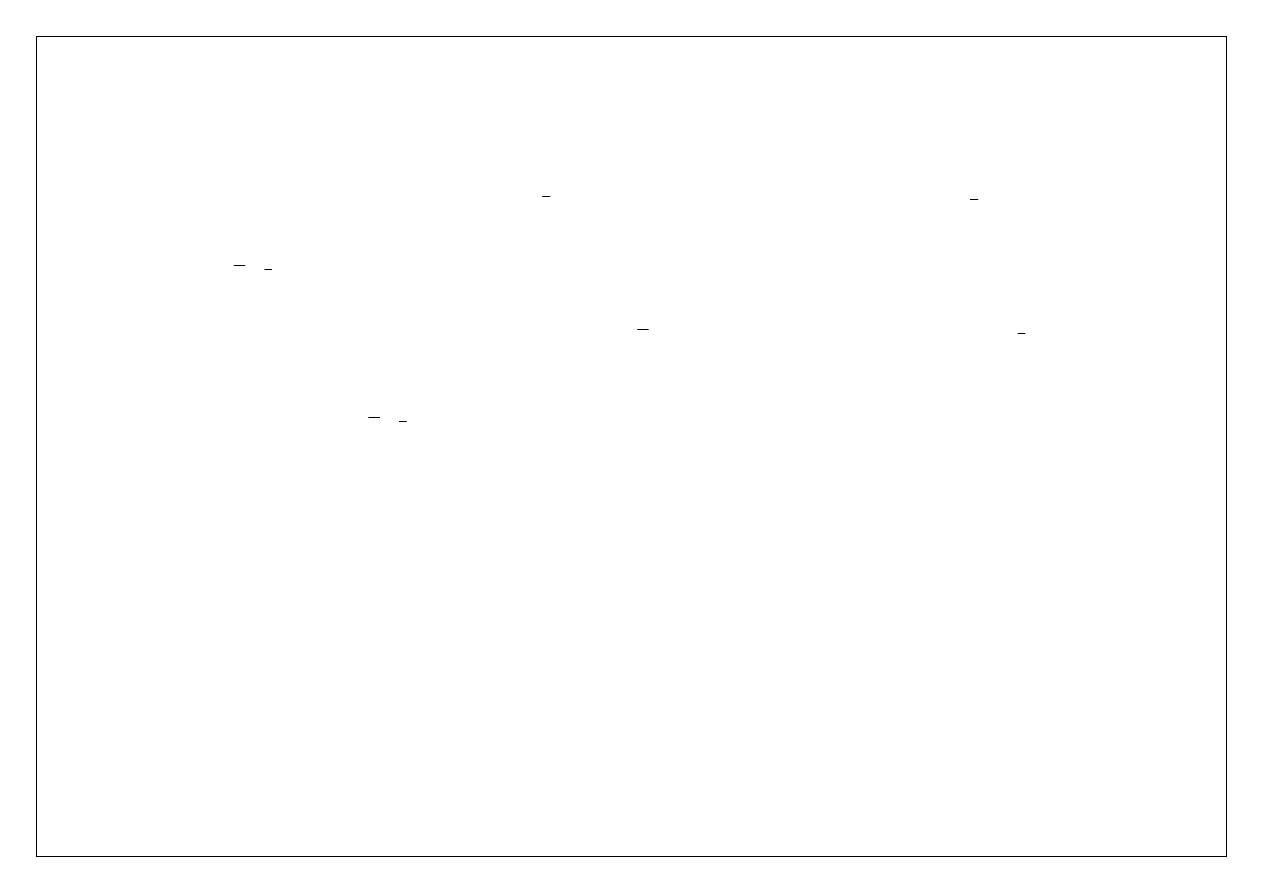
Układ swobodny składający się z p punktów materialnych
Współrzędne dowolne:
np.: wektorowe
]
,
,
[
i
i
i
i
z
y
x
r
,
p
i
,...,
2
,
1
=
kartezjańskie (prostokątne)
i
i
i
z
y
x
,
,
p
i
,...,
2
,
1
=
Współrzędne uogólnione:
i
q , gdzie
s
i
,...,
2
,
1
=
, przy czym:
w
n
s
−
=
- liczba stopni swobody
w - liczba więzi
n - liczba współrzędnych
Współrzędne uogólnione są to współrzędne niezależne od siebie,
opisujące jednoznacznie położenie układu w przestrzeni
(jest to minimalna liczba współrzędnych potrzebnych do opisu położenia układu)
O
x
y
z
i
r
i
P
punkt materialny
o masie m
i
x
i
y
i
z
i

Prof. Edmund Wittbrodt
Więzy
Więzami są ograniczenia nałożone na ruch układu (na współrzędne lub prędkości punktów lub brył układu). Można je
wyrazić w postaci zależności analitycznych nazywanych równaniami więzów.
Rodzaje więzi:
geometryczne i kinematyczne
holonomiczne i nieholonomiczne
skleronomiczne i reonomiczne
dwustronne i jednostronne
idealne i rzeczywiste
Więzy geometryczne dwustronne są więzami, których równania więzów w zapisie wektorowym mają postać
0
)
,.....,
,
,
(
2
1
=
p
j
r
r
r
t
f
,
w
j
,.....,
2
,
1
=
,
a w zapisie skalarnym
0
)
,
,
,
,.........
,
,
,
,
,
,
(
2
2
2
1
1
1
=
p
p
p
j
z
y
x
z
y
x
z
y
x
t
f
,
w
j
,.....,
2
,
1
=
,
gdzie w
−
liczba nałożonych na układ więzi (odebranych stopni swobody).
Prof. Edmund Wittbrodt
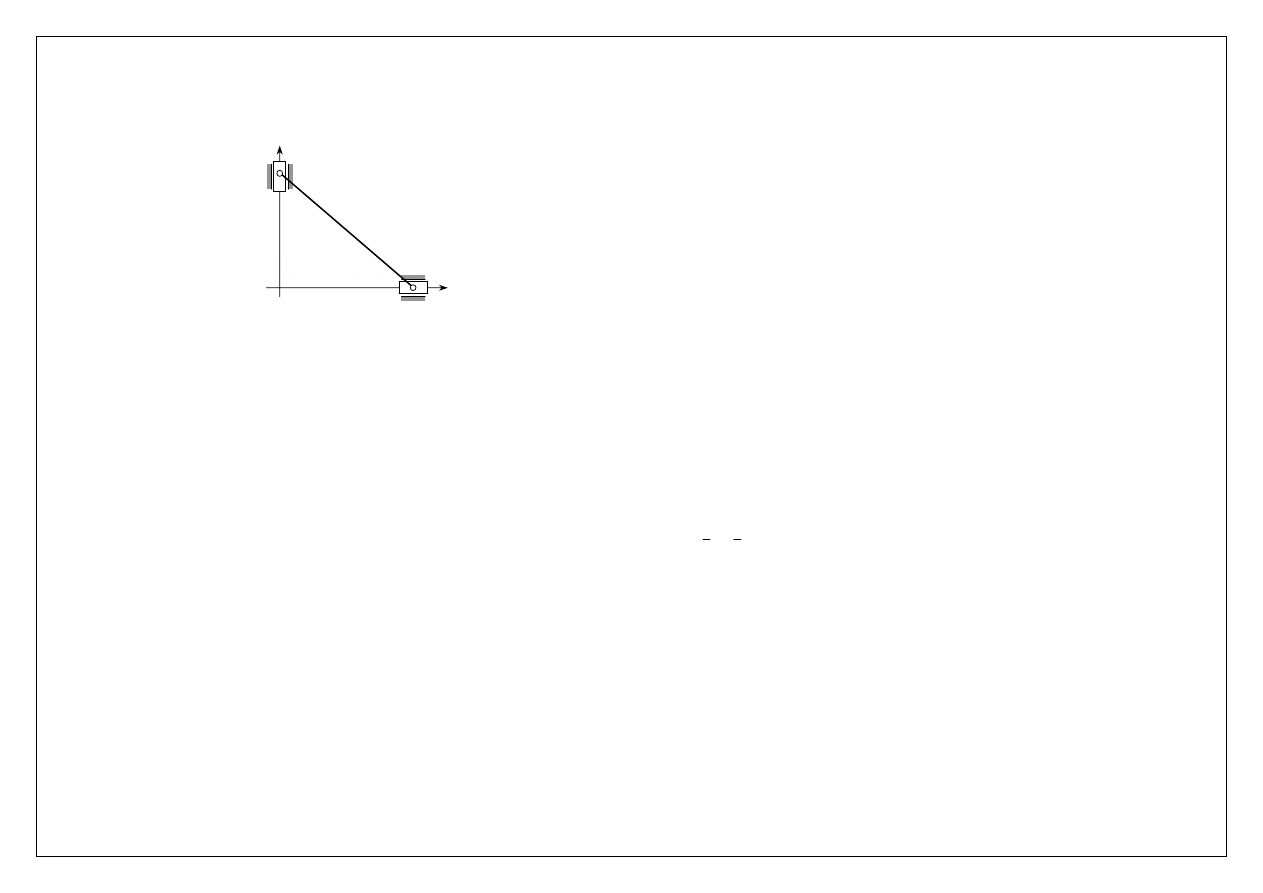
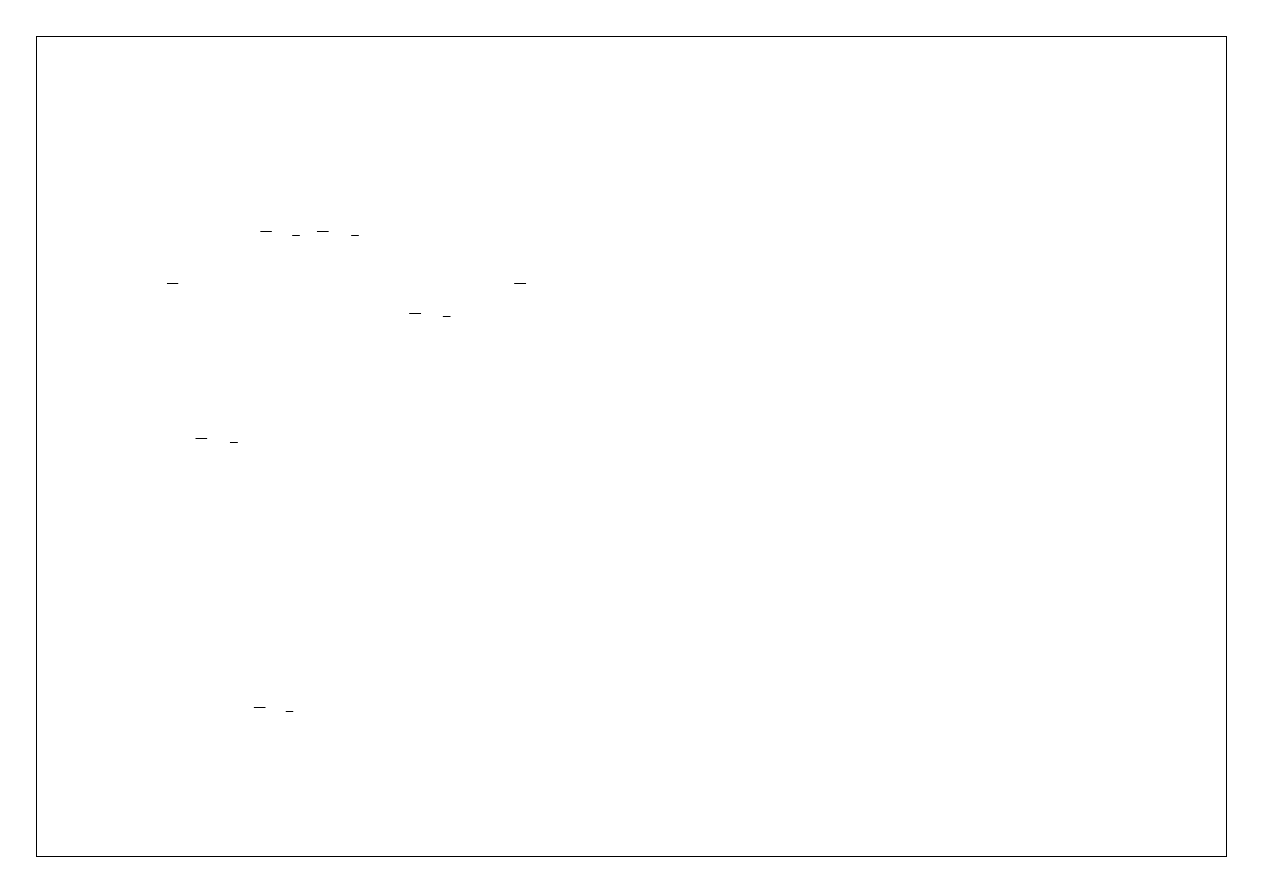
Przykład układu z więziami geometrycznymi (punkt B związany z A za pomocą sztywnego
łącznika) o jednym stopniu swobody
Zależności pomiędzy współrzędnymi dowolnymi, a współrzędnymi uogólnionymi dla układu z więzami holonomicznymi
i reonomicznymi
)
,
,.......,
,
(
2
1
t
q
q
q
x
x
s
i
i
=
)
,
,.......,
,
(
2
1
t
q
q
q
y
y
s
i
i
=
lub w zapisie wektorowym
)
,
,.......,
,
(
2
1
t
q
q
q
r
r
s
i
i
=
p
i
,...,
1
=
)
,
,.......,
,
(
2
1
t
q
q
q
z
z
s
i
i
=
gdzie: s
−
liczba stopni swobody układu, p
−
liczba punktów materialnych.
f(x,y)= x
2
+y
2
-l
2
=0
y
x
l
y
x
O
A
B
Prof. Edmund Wittbrodt
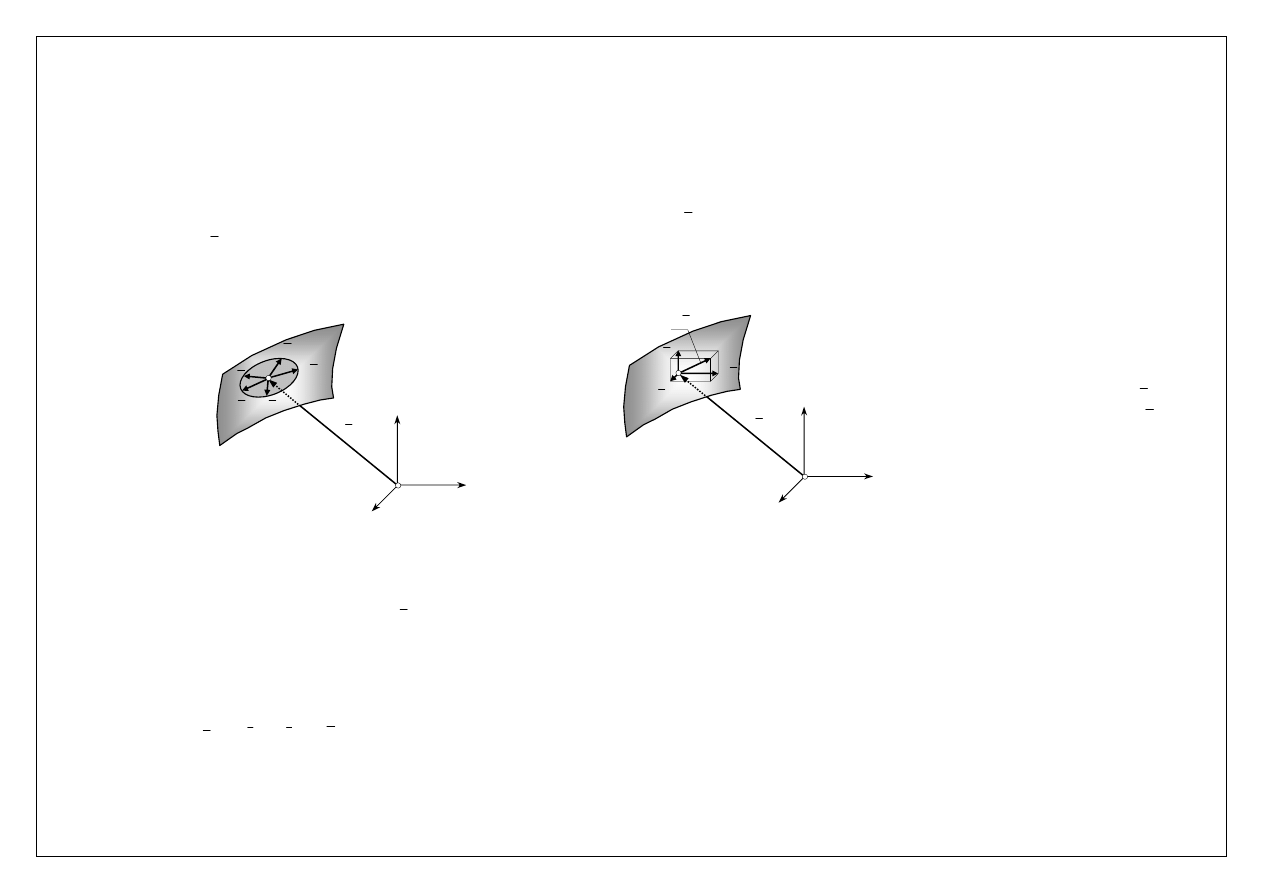
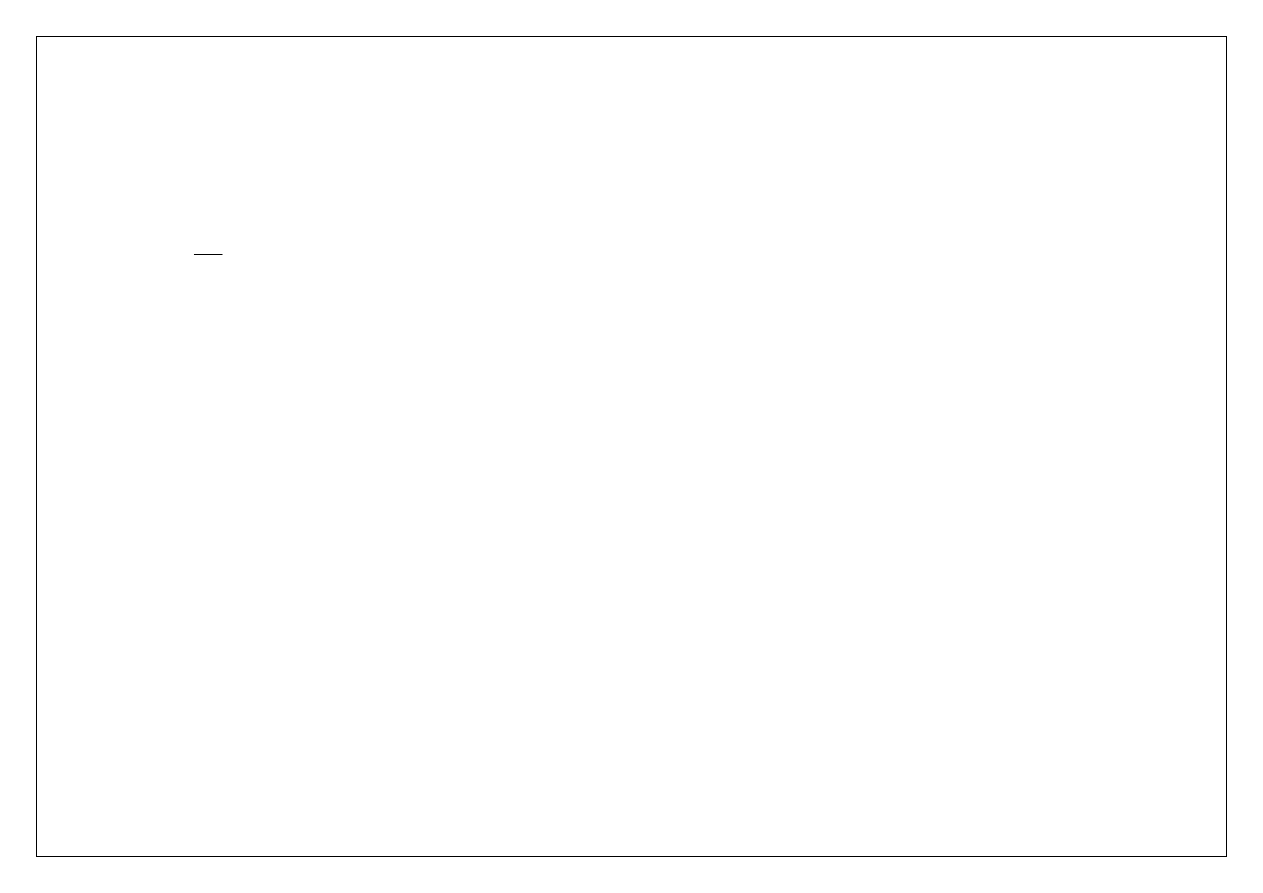
Przemieszczenia przygotowane
Przemieszczenie (przesunięcie) przygotowane (wirtualne) jest to każde dowolne, możliwe przemieszczenie punktu, zgodne z
więzami. Jeżeli położenie punktu określone jest za pomocą wektora
r
, to przemieszczenie przygotowane oznaczamy
symbolem
r
δ
.
Przemieszczenia: a) przygotowane
r
δ
,
b) rzeczywiste
dr
Przemieszczenie przygotowane
r
δ
jest to pomyślane (wyobrażalne) przesuniecie punktu, o kierunku zgodnym
z kierunkiem możliwej prędkości tego punktu.
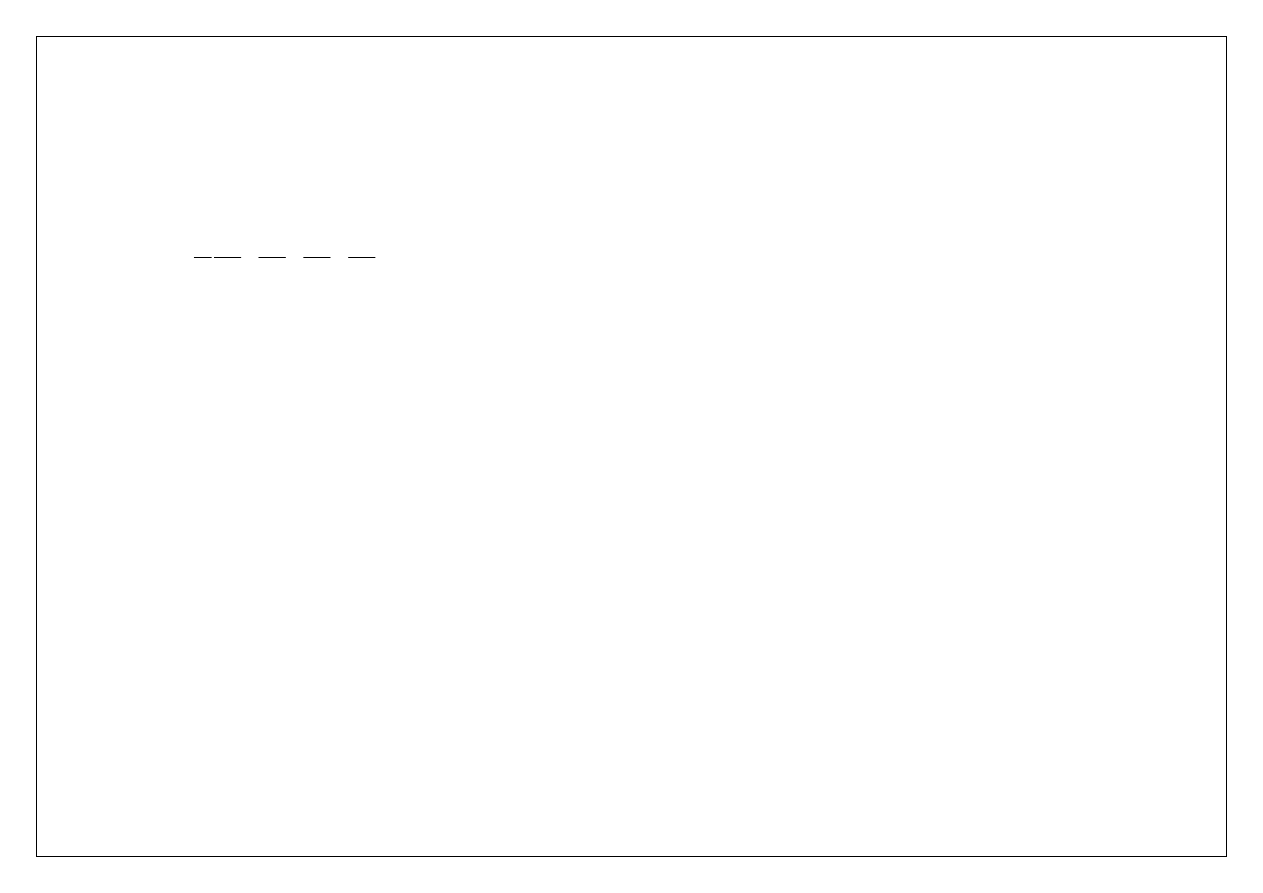
Przemieszczenie przygotowane jest wektorem, który możemy przedstawić w postaci
k
z
j
y
i
x
r
δ
δ
δ
δ
+
+
=
.
P
O
x
z
P
a)
r
δ
r
δ
r
δ
r
δ
r
δ
r
y
P
O
x
y
z
r
b)
dr
dx
dy
dz
Prof. Edmund Wittbrodt
Jeżeli dane jest równanie więzów w postaci
0
)
,
,
(
=
z
y
x
f
, przedstawiające równanie powierzchni, na której znajduje się
rozpatrywany punkt, to dla przesunięcia przygotowanego zachodzi związek
0
=
∂
∂
+
∂
∂
+
∂
∂
z
z
f
y
y
f
x
x
f
δ
δ
δ
, co można zapisać
0
=
⋅
∂
r
f
grad
r
δ
.
Jeżeli mamy do czynienia z układem p punktów materialnych, poddanych w więzom, to zachodzą następujące związki
0
1
=
⋅
∂
∂
+
⋅
∂
∂
+
⋅
∂
∂
∑
=
p
i
i
i
j
i
i
j
i
i
j
z
z
f
y
y
f
x
x
f
δ
δ
δ
,
w
j
,.....,
2
,
1
=
, lub w postaci wektorowej
0
1
=
⋅
∑
=
∂
i
p
i
j
r
r
f
grad
i
δ
,
w
j
,.....,
2
,
1
=
.
Przyrosty elementarne współrzędnych prostokątnych dowolnego i-tego punktu są równe:
∑
=
∂
∂
=
s
j
j
j
i
i
q
q
x
x
1
δ
δ
,
∑
=
∂
∂
=
s
j
j
j
i
i
q
q
y
y
1
δ
δ
,
p
i
,.....,
2
,
1
=
lub w zapisie wektorowym
∑
=
∂
∂
=
s
j
j
j
i
i
q
q
r
r
1
δ
δ
,
p
i
,.....,
2
,
1
=
∑
=
∂
∂
=
s
j
j
j
i
i
q
q
z
z
1
δ
δ
,
gdzie s
−
liczba stopni swobody.
Prof. Edmund Wittbrodt
Zasada prac przygotowanych (wirtualnych)
Praca przygotowana jest to elementarna praca siły
,
,
i
xi
yi
zi
P P
P
P
na przemieszczeniu przygotowanym
[
]
,
,
i
i
i
i
r
x
y
z
δ δ
δ
δ
i
zi
i
yi
i
xi
i
i
z
P
y
P
x
P
r
P
L
δ
δ
δ
δ
δ
+
+
=
⋅
=
.
Jeżeli na układ p punktów materialnych, na które działają siły
i
P
, poddano przesunięciom przygotowanym
i
r
δ
, to praca
przygotowana tych sił jest równa
∑
∑
=
=
+
+
=
⋅
=
p
i
i
zi
i
yi
i
xi
p
i
i
i
z
P
y
P
x
P
r
P
L
1
1
)
(
δ
δ
δ
δ
δ
gdzie:
i
i
i
z
y
x
δ
δ
δ
,
,
−
przyrosty elementarne współrzędnych i-tego punktu w układzie x,y,z,
zi
yi
xi
P
P
P
,
,
−
składowe siły działającej na i-ty punkt w układzie x,y,z.
Prof. Edmund Wittbrodt
Zasada prac przygotowanych: Warunkiem koniecznym i wystarczającym równowagi dowolnego układu punktów jest, aby
suma prac przygotowanych wszystkich sił czynnych i sił reakcji więzów, przy dowolnym przemieszczeniu przygotowanym,
była równa zeru
0
)
(
1
=
⋅
+
⋅
=
∑
=
i
i
p
i
i
i
r
R
r
P
L
δ
δ
δ
,
gdzie:
i
P
−
siła czynna działająca na i-ty punkt,
i
R
−
reakcja
więzów działających na i-ty punkt,
i
R
i
r
δ
−
przesunięcie
przygotowane i-tego punktu.
Praca przygotowana więzów idealnych jest zawsze równa zeru
0
=
⋅
i
i
r
R
δ
,
p
i
,.....
2
,
1
=
,
gdyż są to wektory prostopadłe.
Zasada prac przygotowanych dla układów o więzach idealnych: Warunkiem koniecznym i wystarczającym równowagi
dowolnego układu punktów o więzach idealnych jest, aby suma prac przygotowanych wszystkich sił czynnych działających
na ten układ, przy dowolnym przemieszczeniu przygotowanym, była równa zeru
0
1
=
⋅
=
∑
=
p
i
i
i
r
P
L
δ
δ
.

Prof. Edmund Wittbrodt
Siły uogólnione
Siły uogólnione
j
Q
są to wielkości spełniające równanie
∑
=
=
s
j
j
j
q
Q
L
1
δ
δ
, j=1,2,...s,
gdzie:
L
δ
– praca przygotowana układu,
j
q
δ
– przesunięcie przygotowane, zgodne z j-tą współrzędną uogólnioną,
j
Q
– j-ta
siła uogólniona, zgodna z j-tą współrzędną uogólnioną, s – liczba stopni swobody (współrzędnych uogólnionych).
Siłę uogólnioną możemy wyznaczyć z następującej zależności
∑
=
∂
∂
+
∂
∂
+
∂
∂
=
p
i
j
i
zi
j
i
yi
j
i
xi
j
q
z
P
q
y
P
q
x
P
Q
1
)
(
, j=1,2,...s,
gdzie:
zi
yi
xi
P
P
P
,
,
– rzuty siły działającej na i-ty punkt,
i
i
i
z
y
x
,
,
– współrzędne prostokątne i-tego punktu,
j
q
– j-ta
współrzędna uogólniona, s – liczba stopni swobody układu, p – liczba punktów układu.
Siła uogólniona w zachowawczym polu sił jest równa
j
j
q
V
Q
∂
∂
−
=
, j=1,2,...s
gdzie: V – energia potencjalna układu, podawana jako funkcja współrzędnych uogólnionych.
Prof. Edmund Wittbrodt
Równowaga w zachowawczym polu sił
Jeżeli na układ materialny o więzach idealnych działa zachowawcze pole sił, to jest on w równowadze wtedy, gdy jego
energia potencjalna przyjmuje wartość ekstremalną
0
=
∂
∂
j
q
V
, j=1,2,...s
gdzie: V – energia potencjalna układu, podawana jako funkcja współrzędnych uogólnionych, s – liczba stopni swobody
układu.
Zasada Dirichleta:
Jeżeli na nieswobodny układ materialny działa zachowawcze pole sił, wówczas położenie, w którym energia potencjalna
tego układu osiąga minimum, jest położeniem równowagi stałej.

Prof. Edmund Wittbrodt
Ogólne równanie dynamiki analitycznej
Równania dynamiki, z uwzględnieniem sił reakcji więzów, w postaci
i
i
i
i
R
P
r
m
+
=
&
&
,
p
i
,.....,
2
,
1
=
lub:
xi
xi
i
i
R
P
x
m
+
=
&
&
,
yi
yi
i
i
R
P
y
m
+
=
&
&
zxi
zi
i
i
R
P
z
m
+
=
&
&
,
p
i
,.....,
2
,
1
=
pomnożymy skalarnie przez
i
r
δ
, lub odpowiednio przez
,
,
δ
δ
δ
i
i
i
x
y
z
oraz zsumujemy stronami. Wtedy otrzymujemy
0
)
(
1
=
⋅
−
+
∑
=
p
i
i
i
i
i
r
r
m
R
P
δ
&
&
lub
0
]
)
(
)
(
)
[(
1
=
−
+
+
−
+
+
−
+
∑
=
p
i
i
i
i
zi
zi
i
i
i
yi
yi
i
i
i
xi
xi
z
z
m
R
P
y
y
m
R
P
x
x
m
R
P
δ
δ
δ
&
&
&
&
&
&
.
Natomiast dla układów z więzami holonomicznymi, idealnymi i dwustronnymi, zachodzą związki:
0
)
(
1
=
⋅
−
∑
=
p
i
i
i
i
i
r
r
m
P
δ
&
&
lub
0
]
)
(
)
(
)
[(
1
=
−
+
−
+
−
∑
=
p
i
i
i
i
zi
i
i
i
yi
i
i
i
xi
z
z
m
P
y
y
m
P
x
x
m
P
δ
δ
δ
&
&
&
&
&
&
,
gdzie:
]
,
,
[
zi
yi
xi
i
P
P
P
P
– siła działająca na i-ty punkt,
]
,
,
[
i
i
i
i
z
y
x
r
δ
δ
δ
δ
– przesunięcie przygotowane i-tego punktu,
i
i
a
r
=
&
&
–
przyspieszenie i-tego punktu, p – liczba punktów materialnych.
Równania te, sformułowane przez Lagrange’a, przedstawiają zasadę d’Alemberta dla układu punktów materialnych o
więzach idealnych, holonomicznych i dwustronnych w układzie inercjalnym. Noszą one również nazwę ogólnych równań
dynamiki analitycznej.
Prof. Edmund Wittbrodt
Równania Lagrange’a II rodzaju
Równania Lagrange’a II rodzaju mają postać
j
j
j
j
j
Q
q
V
q
D
q
E
q
E
dt
d
=
∂
∂
+
∂
∂
+
∂
∂
−
∂
∂
&
&
,
s
j
,.....,
2
,
1
=
gdzie: E – energia kinetyczna układu,
D – funkcja dyssypacji energii układu (prędkość rozpraszania energii mechanicznej),
V – energia potencjalna układu,
Q
j
– siła uogólniona (niepotencjalna i niedyssypatywna część siły czynnej) działająca w kierunku j-tej współrzędnej
uogólnionej,
j
q
– j-ta współrzędna uogólniona,
j
q
&
– j-ta prędkość uogólniona (zgodna z j-tą współrzędną uogólnioną),
s – liczba stopni swobody układu.
Wyszukiwarka
Podobne podstrony:
Koła 2010, pwr, air, semestr 3, Mechanika analityczna, KOŁO ĆWICZENIA (matek sp)
Mechanika analityczna program zajec id 290745
mechanika analityczna (2)
03 Równania kanoniczne, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
tchoń,mechanika analityczna,MECHANIKA HAMILTONOWSKA
Mechanika analityczna id 290740 Nieznany
Mechanika Analityczna, Semestr 1, mechanika
04 Teoria sterowania, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
Mechanika analityczna dzidkowski hamilton 2
Mechanika Analityczna Teoria
mechanika analityczna
Mechanika analityczna material cwiczeniowy (Zastosowa
Mechanika Analityczna 20.06.08r., Semestr 1, mechanika
01 Elementy rachunku wariacyjnego, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
sciaga anal, PWr Mechaniczny [MBM], Semestr 8, Mechanika analityczna, WYKŁAD, Mechanika analityczna
Mechanika analityczna material cwiczeniowy id 290743
mechanika analityczna wprowadzenie
02 Więzy, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
tchoń,mechanika analityczna,TWIERDZENIA
więcej podobnych podstron