ZADANIA Z TEORII STEROWANIA
Ciało o masie m może poruszać się ruchem postępowym pozostając na uwięzi w postaci sprężyny o sztywności k i poruszając się w ośrodku stawiającym opór proporcjonalny do prędkości (współczynnik proporcjonalności wynosi b). Napisać funkcję Hamiltona - Pontriagina oraz równania sprzężone dla następującego zagadnienia sterowania: doprowadzić to ciało w minimalnym czasie do stanu zerowego za pomocą siły zewnętrznej ograniczonej co do modułu.
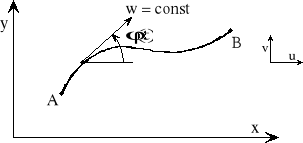
Statek płynie w płaszczyźnie xy przez obszar z silnymi prądami. Prąd ma składowe prędkości u(x, y) w kierunku x oraz v(x,y) w kierunku y. Prędkość statku względem wody ma stałą wartość w, zaś kierunek prędkości względnej zadany jest przez kąt φ między wektorem tej prędkości i osią x (rys.). Traktując statek jako punkt materialny, a kąt φ jako sterowanie, sformułować warunki potrzebne do wyznaczenia takiego prawa sterowania, aby czas przepływu z punktu A do punktu B (z góry danych) był minimalny. Następnie przy założeniu, że składowe prędkości nie zależą od współrzędnej y, wyznaczyć konkretne prawo sterowania statkiem.
Wskazówki:
1. w zadaniu tym równanie stanu można uzyskać wyłącznie na podstawie relacji kinematycznych.
2. zastosować ZMP w wersji bez ograniczenia na sterowanie; wówczas dla sterowania optymalnego można przyjąć, że
.
Samolot pionowego startu o masie m zaczyna manewr lądowania na wysokości hA gdzie ma prędkość vA (pionowo w dół), a kończy manewr na zadanej wysokości hB gdzie ma mieć prędkość vB. Zakładając, że:
- opór aerodynamiczy wynosi
, c = const >0
- ciąg silnika hamującego nie zależy od
i ρ przy czym 0≤ F ≤Fmax
Na podstawie ZMP sformułować model matematyczny potrzebny do zaprojektowania manewru w taki sposób aby odbył się on w minimalnym czasie.
Uwaga: Model matematyczny tzn. równania stanu, wskaźniki jakości, hamiltonian itd.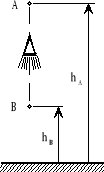
4. Dla pewnego układu, którego równanie stanu ma postać ![]()
, wyznaczyć sterowanie minimalizujące wskaźnik jakości 
i przeprowadzające układ z położenia ![]()
do ![]()
w czasie ![]()
.
5. Wyznaczyć strategię sterowania, które przeprowadzi układ opisany równaniem
![]()
ze stanu x(0) = x0 do stanu x(1) = 0 i zminimalizuje przy tym wskaźnik jakości

6. Ruch pewnego obiektu opisany jest równaniami
![]()
, ![]()
Obiekt ten ma tak przejść w zadanym czasie T ze stanu zerowego do dowolnego stanu końcowego, aby zminimalizować całkę
Zbudować algorytm wyznaczenia tego sterowania.
Wyszukiwarka
Podobne podstrony:
03 Równania kanoniczne, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
01 Elementy rachunku wariacyjnego, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
02 Więzy, MEiL, [NK 336A] Mechanika analityczna, Zadania domowe
Mechanika Analityczna zadanie
04, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, sprawozdania, Sprawozdania, spraw
Mechanika Analityczna Teoria
Koła 2010, pwr, air, semestr 3, Mechanika analityczna, KOŁO ĆWICZENIA (matek sp)
sterówka, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, aytomaty,
Teoria sterowania
Mechanika analityczna program zajec id 290745
1236488004215 Teoria Sterowania Mechatronika zagadnieniaid 13981
mechanika analityczna (2)
Teoria sterowania 1 2
Teoria sterowania wykład 3 (14 03 2003)
Teoria sterowania wykład 4 (21 03 2003)
04 TEORIA (MODEL) BOHRA ATOMU Nieznany
silnik prądu stałego sterowany1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
Laboratorium 01, Mechatronika WAT, Semest IV, Teoria sterowania, Laboratorium, Skrypty
więcej podobnych podstron