1
Ć
WICZENIE NR 1
Wybrane zagadnienia teoretyczne
GENERATORY POMIAROWE
Schematy blokowe wybranych generatorów pomiarowych
Regulacja
częstotliwości
Płynna
regulacja U
wy
Regulacja
U
wy
Regulacja
U
wy
, R
wy
2
1
WY I
(napięciowe)
WY II
(mocy)
Transformator
dopasowujący
Dzielnik
napięcia
Woltomierz
elektroniczny
Wzmacniacz
mocy
Wzmacniacz
napięciowy
Wzmacniacz
separator
Generator
wzbudzający
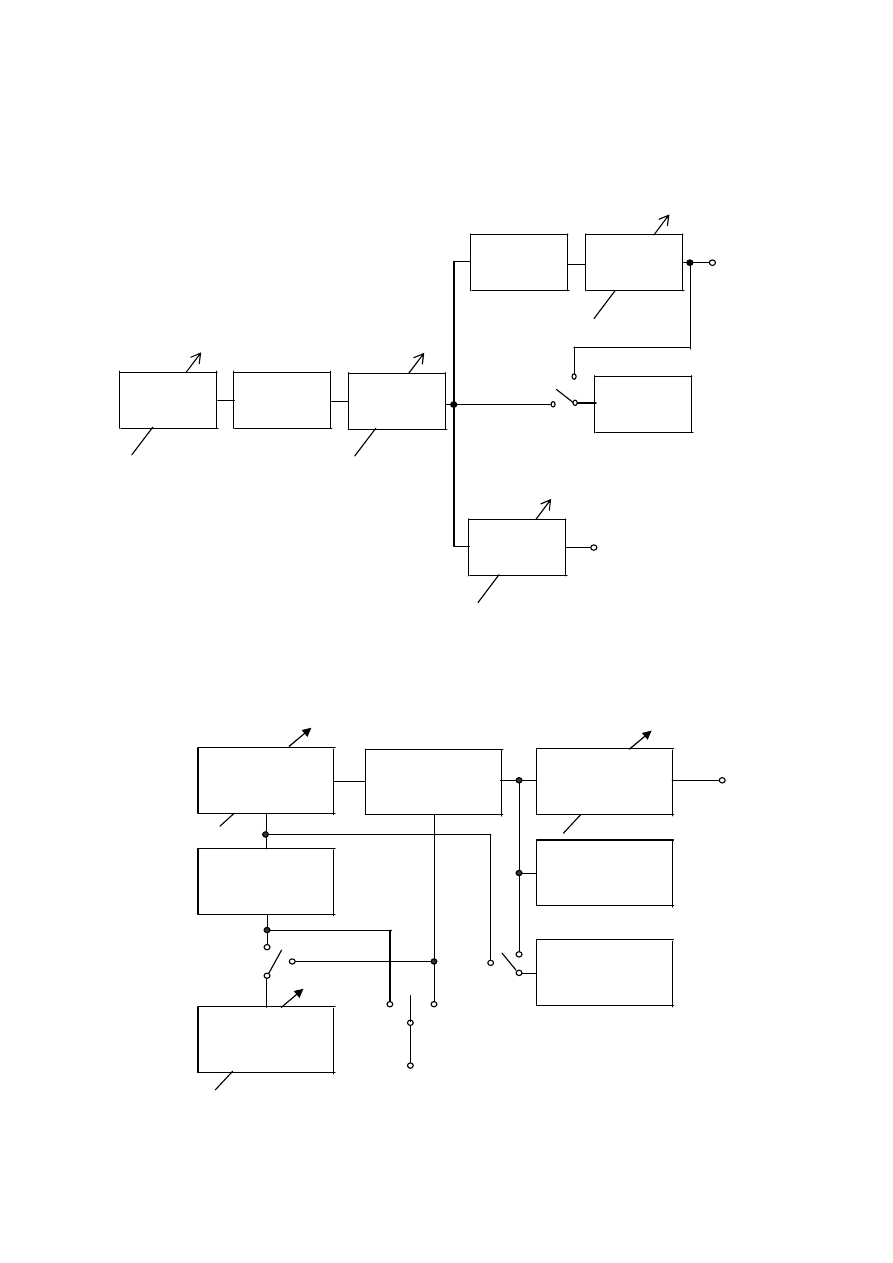
Rys.A) Schemat funkcjonalny generatora pomiarowego m.cz.
Rys.B) Schemat blokowy generatora pomiarowego w.cz. z AM i FM
WY
AM
FM
„m”, „
∆
f”
WE modulacji
zewnętrznej
U
wy
f
FM
AM
Miernik
„m” i ‘
∆
f”
Woltomierz
elektroniczny
Generator
m.cz.
Modulator
częstotliwości
Układy
wyjściowe
Generator
wzbudzający
Wzmacniacz
separator
modulator AM
2
Układ
wyzwalania
zewnętrznego
WE
WY
impulsów odniesienia
(synchronizacji)
WY
U
wy
t
i
; t
n
;t
o
t
op
f
i
Układy
pomiarowe
Układy
wyjściowe
Układ
kształtujący
I
Układ
kształtujący
II
Układ
opóźniający
Generator
sterujący
Wew.
Zew.
Ręczne
Rys.C) Schemat funkcjonalny generatora impulsów prostokątnych.
3
1) Generator wzbudzający RC
Generatory RC są to generatory ze sprzężeniem zwrotnym.
W celu zapewnienia poprawnej pracy, generatory RC budowane są jako układy z dodatnim i ujemnym sprzężeniem
zwrotnym zwane także generatorami z układem mostkowym (czwórniki
α
i
β
tworzą mostek niezrównoważony).
Czwórnik sprzężenia zwrotnego
γ
składa się z dwóch czwórników
α
i
β
. Jeden z tych czwórników musi być
czwórnikiem selektywnym a drugi aperiodycznym.
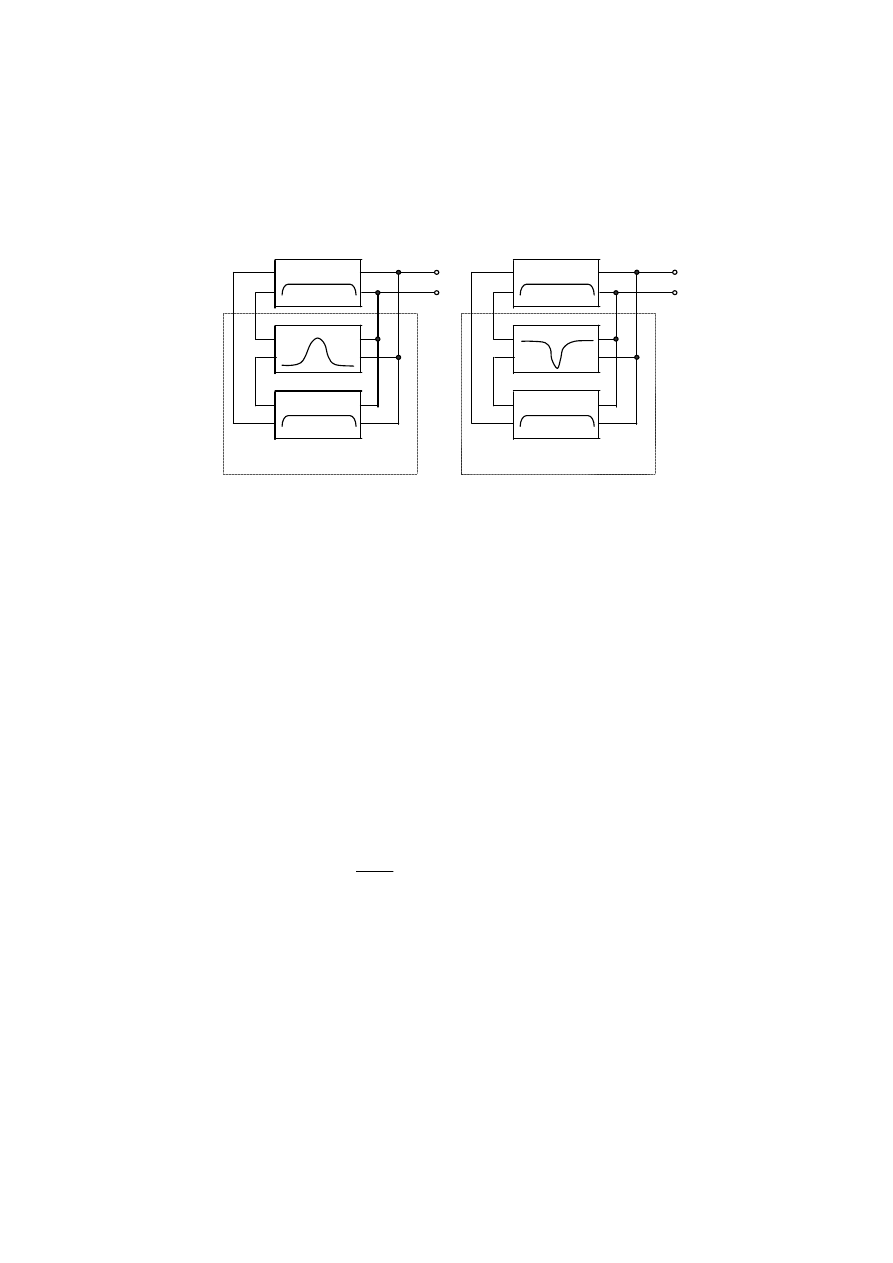
Na rys.1 przedstawiono schematy funkcjonalne generatorów RC. Rys. 1.a) przedstawia generator z selektywnym
dodatnim sprzężeniem zwrotnym a rys. 1.b) generator z selektywnym ujemnym sprzężeniem zwrotnym.
Ujemne sprzężenie zwrotne stabilizuje parametry wzmacniacza.
Zastosowanie tego sprzężenia zwrotnego powoduje zwiększenie stabilności częstotliwości generatora przez
zwiększenie nachylenia charakterystyki fazowej czwórnika selektywnego (wzrasta tzw. dobroć fazowa układu).
Zastosowanie aperiodycznego sprzężenia zwrotnego (dodatniego lub ujemnego) umożliwia stabilizację amplitudy
(poprzez wprowadzenie nieliniowości do układu) oraz samowzbudzenie generatora. W czwórniku aperiodycznym
zastosowane są elementy nieliniowe np. termistory, żarówki, specjalne układy elektroniczne. Nieliniowość może być
wprowadzona tylko w czwórniku aperiodycznym. Wzmacniacz i czwórnik selektywny muszą mieć liniową
charakterystykę przetwarzania.
Generatory wzbudzające RC najczęściej budowane są w układzie z rys. 1.a). Przykład takiego generatora
pokazano na rys. 2.
Jest to generator z czwórnikiem Wiena. Regulacja częstotliwości odbywa się przez jednoczesną zmianę R lub C
(zaznaczone na rysunku). Rezystory R
T
(termistor) i R
1
tworzą aperiodyczny czwórnik ujemnego sprzężenia zwrotnego.
Częstotliwość napięcia wyjściowego
RC
f
wy
π
2
1
=
regulowana jest w zakresie ~10Hz
÷
~200kHz. W sposób płynny
można regulować częstotliwość w zakresie jednej dekady (np. 1
÷
10kHz; 20
÷
200 Hz).
Niestabilność częstotliwości
<
10
-4
.
Rys.1. Schematy funkcjonalne generatorów wzbudzających RC
a)
b)
Warunki generacji:
K
⋅γ
= 1 czyli:
K
⋅β−α
=1
ϕ
+
ψ
= 0 + 2
π
n
„
+
”
„
−
”
β
α
K
γ
=
α − β
Warunki generacji:
K
⋅γ
= 1 czyli:
K
⋅α−β
=1
ϕ
+
ψ
= 0 + 2
π
n
„
+
”
„
−
”
β
α
K
γ
=
β−α
4
2) Generator funkcji (generator funkcyjny).
Generator funkcji jest generatorem relaksacyjnym. Może generować napięcia o różnym kształcie, z tego względu
nazywany jest także generatorem uniwersalnym. Podstawowym sygnałem generowanym jest napięcie rrójkatne. Zasada
pracy generatora polega na cyklicznym ładowaniu i rozładowaniu kondensatora. Z teorii obwodów wiadomo, że
napiecie na kpondensatorze ładowanym ze źródła napięcia stałego zmienia się wykładniczo (jest więc nieliniowe). W
generatorach funkcji napięcie linearyzuje się wykorzystując integratory lub źródła prądowe o stałej wydajności.
Podstawowe parametry użytkowe generatorów funkcyjnych:
−
zakres częstotliwości: 1mHz
÷
10MHz,
−
stabilność częstotliwości: ~10
-3
Zakres częstotliwości od dołu ograniczony jest przez napięcia progowe komparatorów i upływność kondensatora C. Od
góry ograniczeniem są pojemności pasożytnicze i montażowe układu.
Parametry charakteryzujące kształt napięcia:
- napięcie sinusoidalne: h
≈
1
÷
3 %,
- napięcie trójkątne: współczynnik nieliniowości
<
1%,
- napięcie fali prostokątnej: czasy narastania i opadania zboczy
t
n
i t
o
<<
T.
Inne możliwości generatorów funkcyjnych:
- generacja napięć o innych kształtach,
- możliwość sterowania napięciowego częstotliwością,
- wprowadzenie składowej stałej do przebiegu wyjściowego,
- możliwość modulacji amplitudy i częstotliwości.
Pozostałe parametry jak w generatorach m.cz.
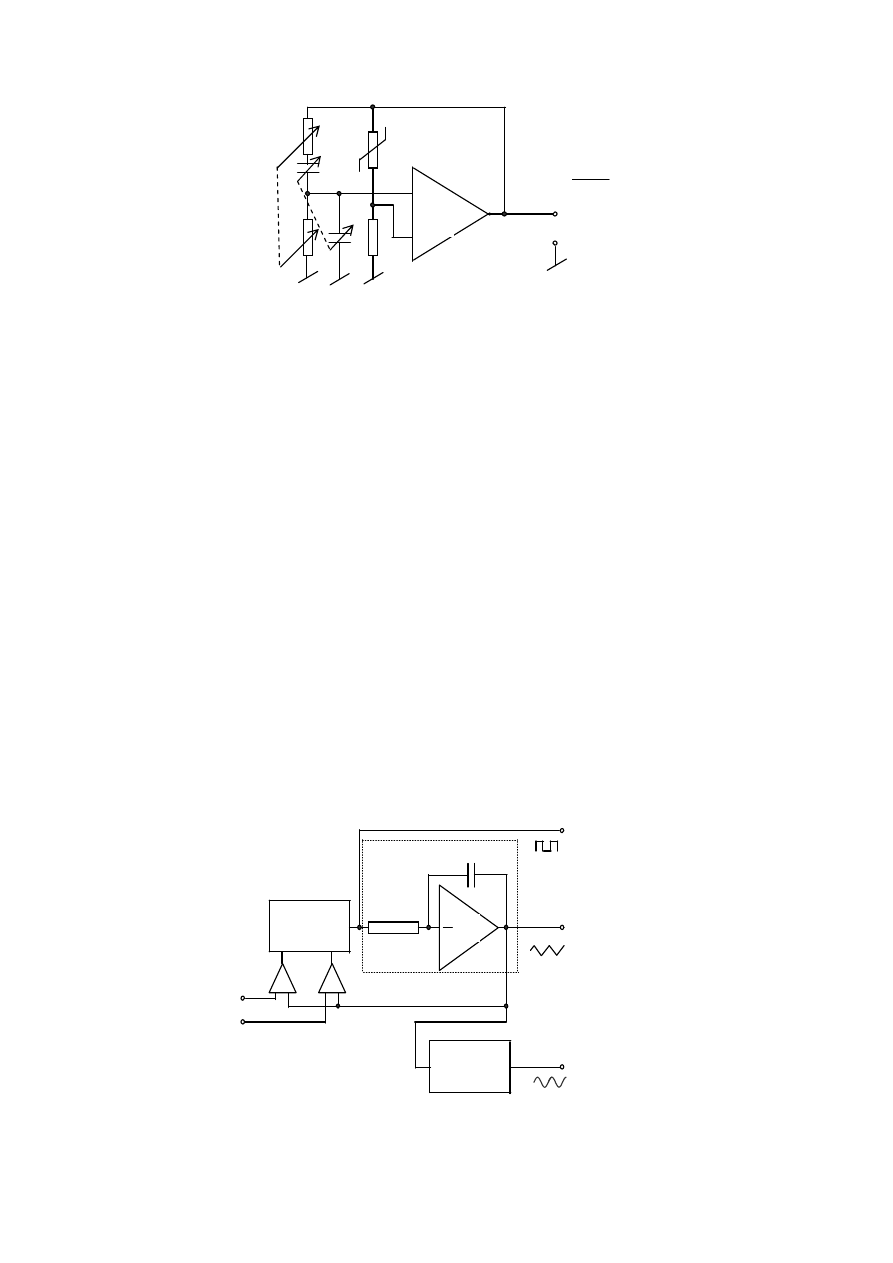
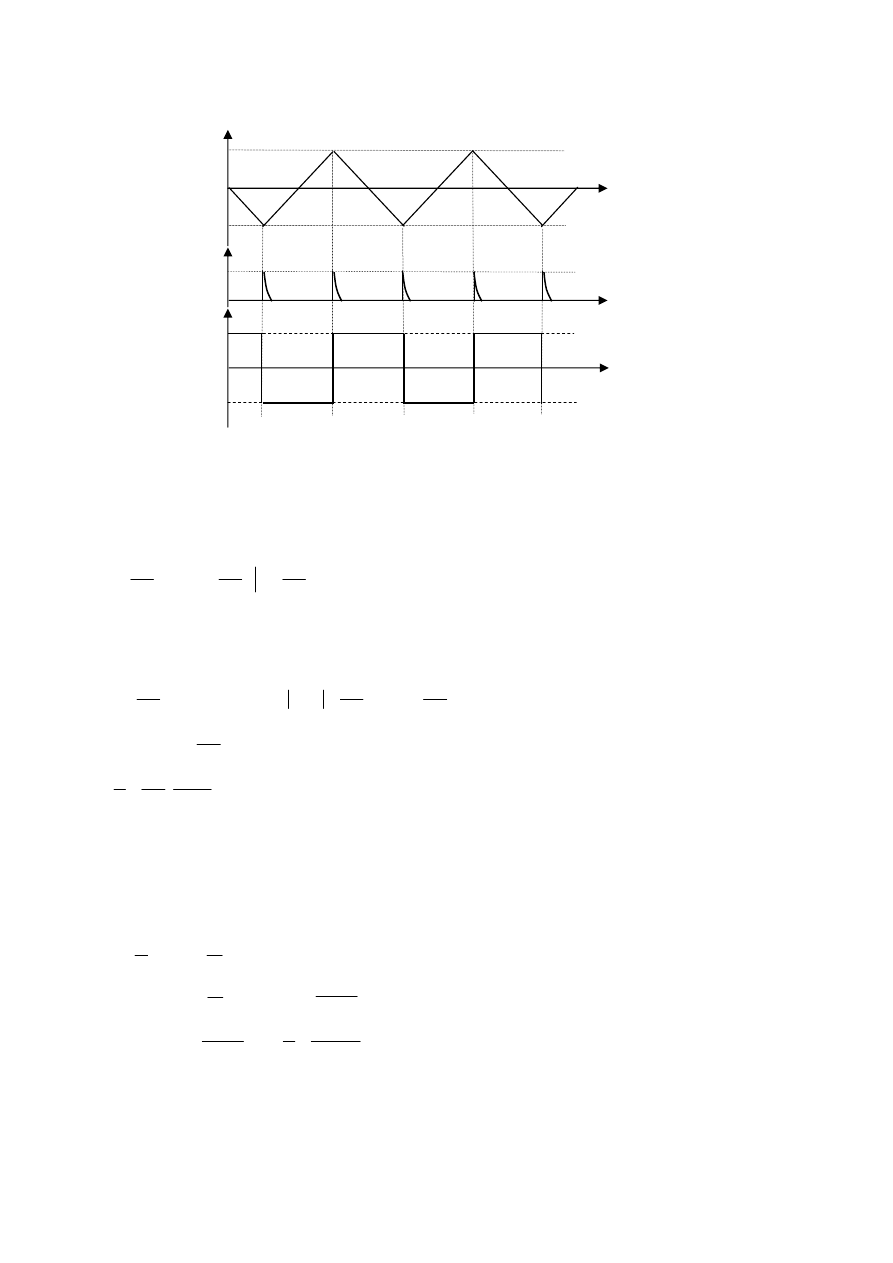
Na rys. 3 przedstawiono uproszczony schemat funkcjonalny generatora funkcji z integratorem a na rys. 4 przebiegi
czasowe w różnych punktach układu.
Rys. 3. Schemat blokowy generatora funkcji z integratorem
-U
w
WY 3
WY 2
WY 1
Układ
kształtujący
sinusoidę
C
R
U
w
K2
K1
Układ
bistabilny
K
Integrator
Rys. 2. Generator RC z mostkiem Wiena
RC
f
WY
π
2
1
=
WY
R
1
R
T
C
C
R
R
−
+
K
5
Zasada pracy.
Na wejście integratora podawane jest napiecie stałe z wyjścia układu
bistabilnego
±
U. Napięcie to podawane jest również na wyjście 2 generatora.
Na wyjściu integratora napięcie zmienia się liniowo:
( )
t
RC
U
t
RC
U
dt
U
RC
t
u
t
t
⋅
=
⋅
=
⋅
=
∫
2
0
2
0
2
1
1
,
Napięcie to podawane jest na wyjście 1 oraz na wejścia komparatorów K1 i K2, gdzie jest porównywane z napięciem
wzorcowym
±
U
w
. W chwili zrównania u
1
(t) z U
w
następuje przełączenie przerzutnika bistabilnego w drugi stan.
Napięcie na wyjściu integratora zmienia się liniowo z przeciwnym znakiem.
Wyznaczenie częstotliwości generowanego sygnału:
( )
1
1
1
1
t
RC
U
t
u
⋅
=
;
( )
w
U
t
u
−
=
1
1
;
1
1
t
RC
U
U
w
⋅
=
−
;
RC
U
U
t
w
⋅
=
1
1
1
1
4
4
U
U
RC
t
T
w
⋅
⋅
=
⋅
=
- okres generowanego napięcia,
RC
U
U
T
f
w
⋅
⋅
=
=
4
1
1
1
- częstotliwość generowanego napięcia.
Regulacja częstotliwości odbywa się przez zmianę wartości R i C. Można również zmieniać f
wy
przez regulację U
1
i U
w
.
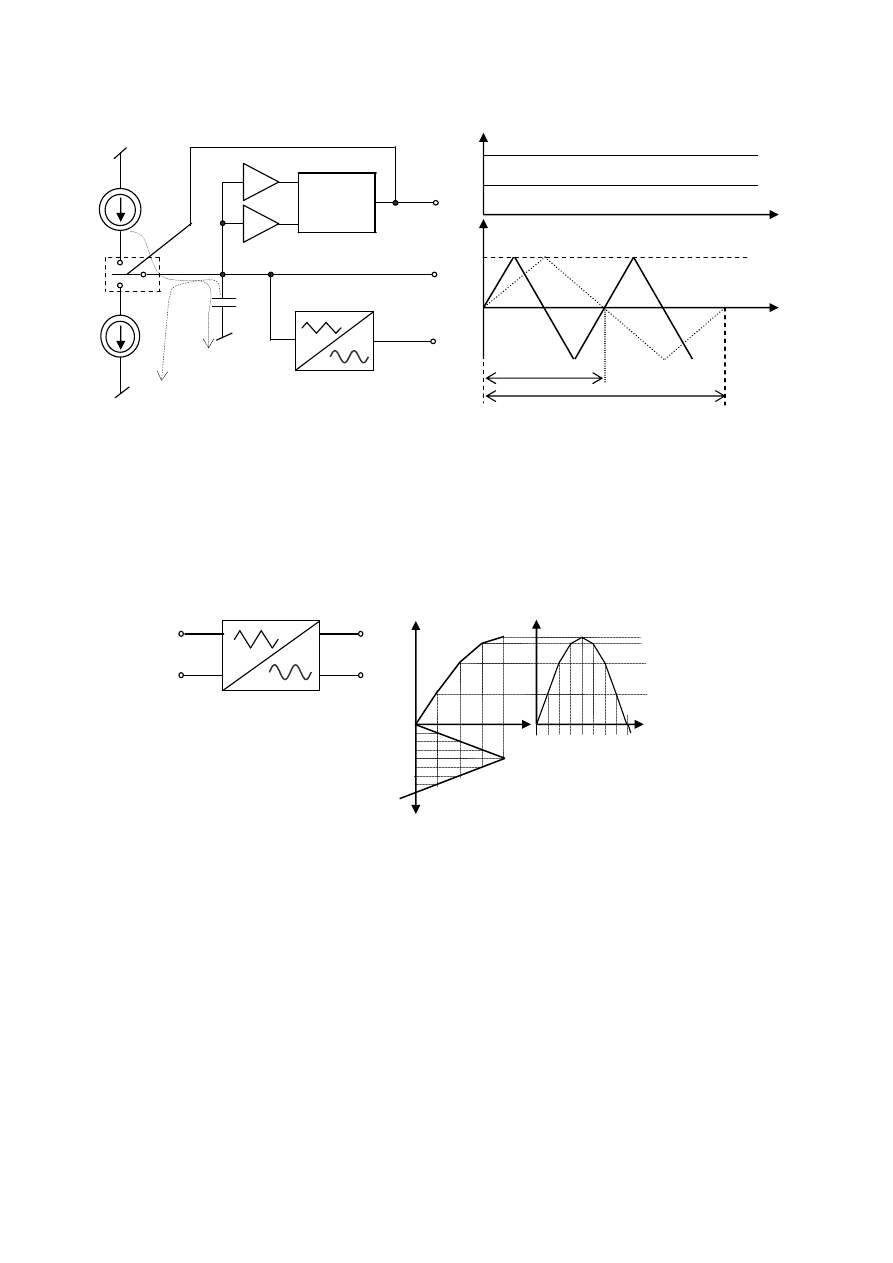
Na rys. 5 przedstawiony jest uproszczony schemat blokowy generatora funkcji pracującego wg drugiej metody
(ładowanie i rozładowanie kondensatora stałym prądem I = const.).
Klucz sterowany jest napięciem z układu bistabilnego. Kondensator C ładowany jest pradem i
Ł
(lub rozładowywany
prądem i
R
).
Ponieważ I
1
i I
2
= const. (źródła prądowe o stałych wydajnościach), to napięcie na kondensatorze (u
C
) zmienia się
liniowo:
( )
t
C
I
dt
I
C
t
u
C
⋅
=
⋅
=
∫
1
1
1
,
dla t = t
1
:
( )
w
C
U
t
C
I
t
u
=
⋅
=
1
1
1
;
1
1
I
C
U
t
w
⋅
=
okres:
1
1
4
4
I
C
U
t
T
w
⋅
⋅
=
=
,
C
U
I
T
f
w
⋅
=
=
4
1
1
Częstotliwość można regulować zmieniając prąd ładowania i rozładowania kondensatora rys. 1.16. W tym celu
stosowane są źródła prądowe o regulowanej wydajności. Według tej zasady pracują generatory funkcyjne scalone np.
ICL 8038.
U
wy
1
Rys. 4. Wykresy czasowe ilustrujące zasadę pracy generatora z rys. 3.
t
0
t
5
t
4
t
3
t
2
t
1
t
U
wy
2
U
kom
p.
t
-U
2
U
2
+U
w
-U
w
t
6
Napięcie sinusoidalne otrzymywane jest z przetwornika trójkąt – sinusoida. Jest to przetwornik pomiarowy o
nieliniowej charakterystyce przetwarzania. Do kształtowania charakterystyki przetwarzania często stosuje się sieć
funkcyjną aproksymującą żądaną charakterystykę odcinkami prostymi rys. 7.
3) Syntezery częstotliwości lub syntetyzery częstotliwości (generatory siatki częstotliwości).
Generatory te pracują na zasadzie syntezy częstotliwości.
Synteza częstotliwości – otrzymywanie napięcia o żądanej częstotliwości poprzez składanie szeregu sygnałów
harmonicznych o częstotliwościach wzorcowych.
Rozróżnia się dwa rodzaje syntezy częstotliwości:
1
°
Synteza bezpośrednia polega na wykonywaniu prostych operacji
arytmetycznych na częstotliwościach składowych:
−
sumowaniu i odejmowaniu dwóch częstotliwości,
−
mnożeniu i dzieleniu częstotliwości przez stałą.
2
°
Synteza pośrednia wykorzystuje właściwości pętli synchronizacji fazowej do sterowania pomocniczego generatora
analogowego.
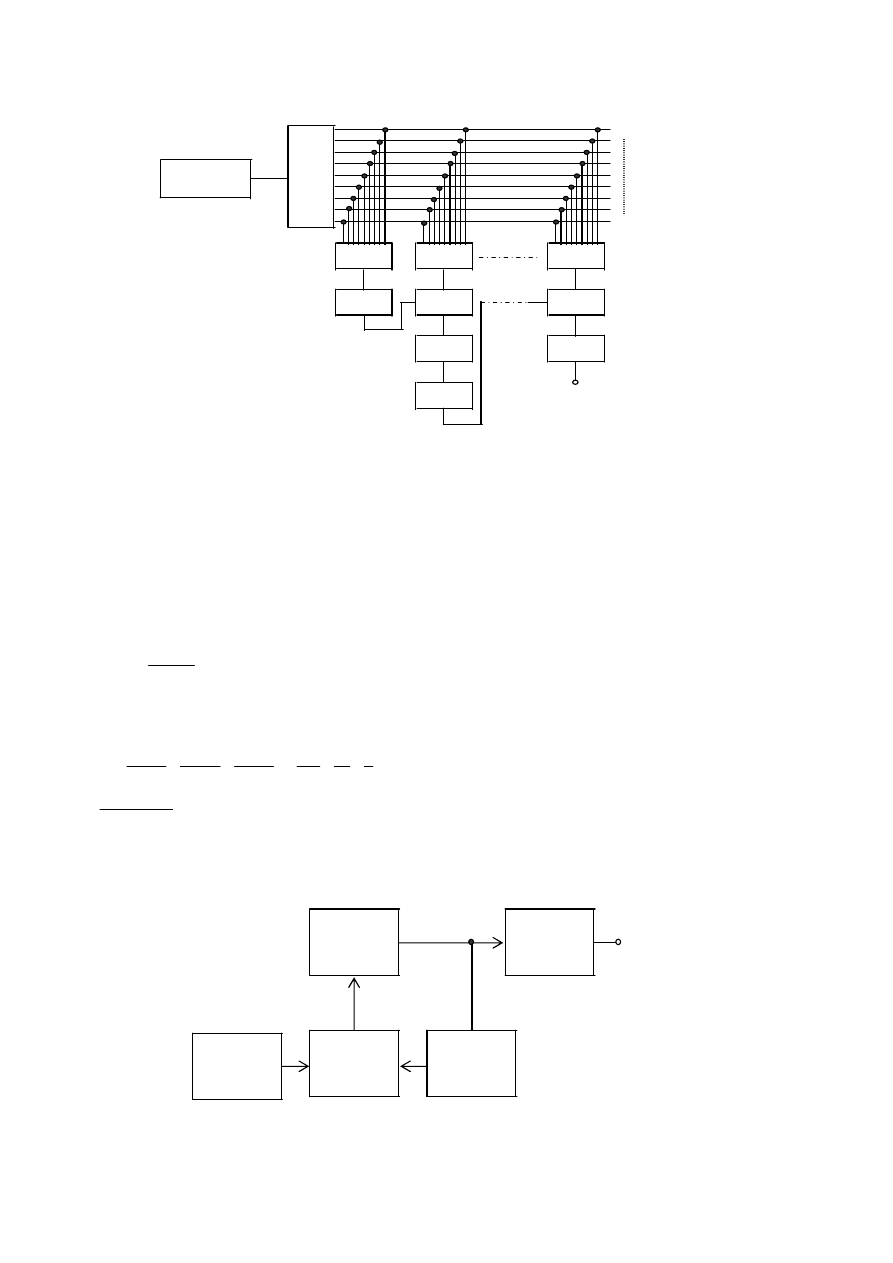
Rys. 8 przedstawia uproszczoną wersję syntezera częstotliwości pracującego w oparciu o metodę syntezy
bezpośredniej.
2
1
Rys. 5. Generator funkcji ze źródłami prądowymi.
K
lu
cz
i
R
i
Ł
WY 3
WY
2
WY 1
C
I
2
I
1
K
2
K
1
Układ
bistabilny
t
t
u
2
u
2
u
1
u
1
u
2
u
2
= U
2m
⋅
sin (a
⋅
u
1
)
a
−
współczynnik
proporcjonalności
Rys. 7. Sposób otrzymywania napięcia sinusoidalnego.
Rys. 6. Regulacja częstotliwości przez zmianę
natężenia prądu.
I
1
>
I
1
’
T
<
T’
T’
T
2
1
I
I
−
=
t
t
u
C
u’
C
U
w
u
C
I
'
2
'
1
I
I
−
=
7
Generator kwarcowy generuje sygnał napięciowy o częstotliwości f
kw
,sterujący pracą syntezera częstotliwości.
Generator harmonicznych jest powielaczem częstotliwości, składa się z układu przetwarzającego napięcie sygnału o
częstotliwości f
kw
na napięcie o bogatym widmie częstotliwości oraz z zestawu filtrów nastrojonych na kolejne
harmoniczne (np. od f
kw
do 9
⋅
f
kw
).
Przełączniki P
1
÷
P
m
służą do wyboru żądanej harmonicznej,
m – numer dekady częstotliwości od najmniej znaczacej,
f/10 – dzielnik częstotliwości,
M i FGP – mieszacz i filtr górnoprzepustowy (sumator częstotliwości).
Na wyjściu otrzymywany jest sygnał napięciowy o częstotliwości:
∑
=
−
⋅
=
m
i
i
m
kw
i
wy
f
n
f
1
10
gdzie: n – numer harmonicznej.
Przykład: ustawić częstotliwość 3,75 MHz, f
kw
= 1MHz n
1
= 5, n
2
= 7, n
3
= 3
MHz
f
f
f
f
f
f
f
kw
kw
kw
kw
kw
kw
wy
75
,
3
75
,
3
100
300
70
5
1
3
10
7
100
5
10
3
10
7
10
5
3
3
2
3
1
3
=
⋅
=
⋅
+
+
=
=
⋅
+
+
=
⋅
+
⋅
+
⋅
=
−
−
−
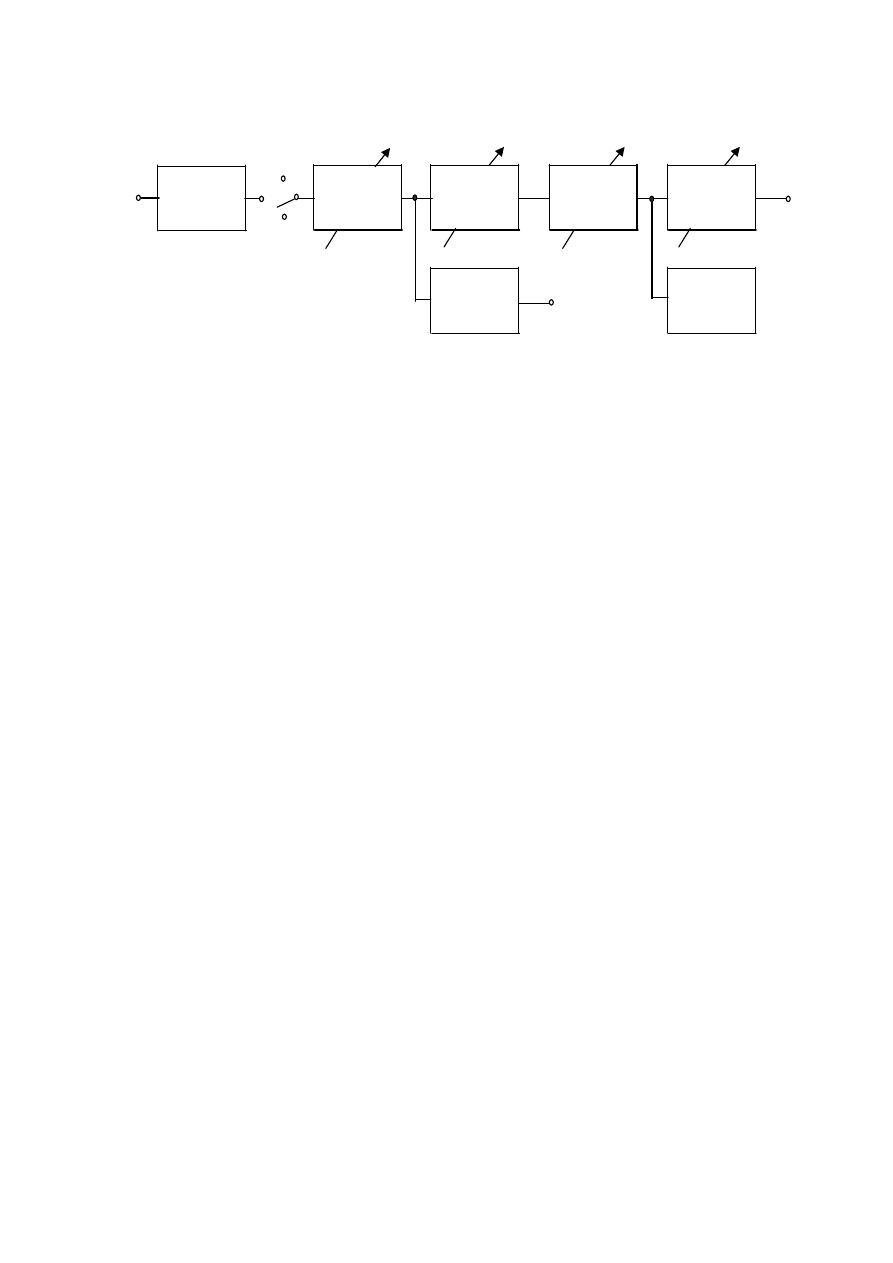
Na rys. 9 przedstawiono uproszczony schemat blokowy syntezera częstotliwości pracującego w oparciu o metodę
syntezy pośredniej.
Rys. 9. Metoda pośrednia syntezy częstotliwości.
f
wy
f
1
f
0
U
st
f
kw
WY
Generator
sterowany
napięciowo
Generator
kwarcowy
Detektor
fazy
f / n
f / m
Rys. 8. Metoda bezpośrednia syntezy częstotliwości.
Pm
9f
kw
f
kw
f
kw
WY
Generator
kwarcowy
G
en
er
at
o
r
h
ar
m
o
n
ic
zn
y
ch
f/10
P1
f/10
FGP
M
P22
FGP
M
8
Rys. 11. Uproszczony schemat funkcjonalny generatora cyfrowego.
f
kw
/k
Dzielnik
f
WY
f
kw
Filtr
m.cz
.
Generator
taktujący
Przetwornik
C / A
Pamięć
cyfrowa
Licznik
Zasada pracy
Generator sterowany napięciowo generuje napięcie o częstotliwości f
0
. Częstotliwość ta po podzieleniu przez „n” jest
porównywana na detektorze fazy z częstotliwością generatora kwarcowego f
kw
.
Jeżeli f
kw
= f
1
to U
st
= 0 i częstotliwość generatora sterowanego napięciowo nie zmienia się. Jeżeli f
kw
≠
f
1
to U
st
≠
0,
częstotliwość generatora zostaje zmieniona.
kw
wy
f
m
n
m
f
n
m
f
f
⋅
=
⋅
=
=
1
0
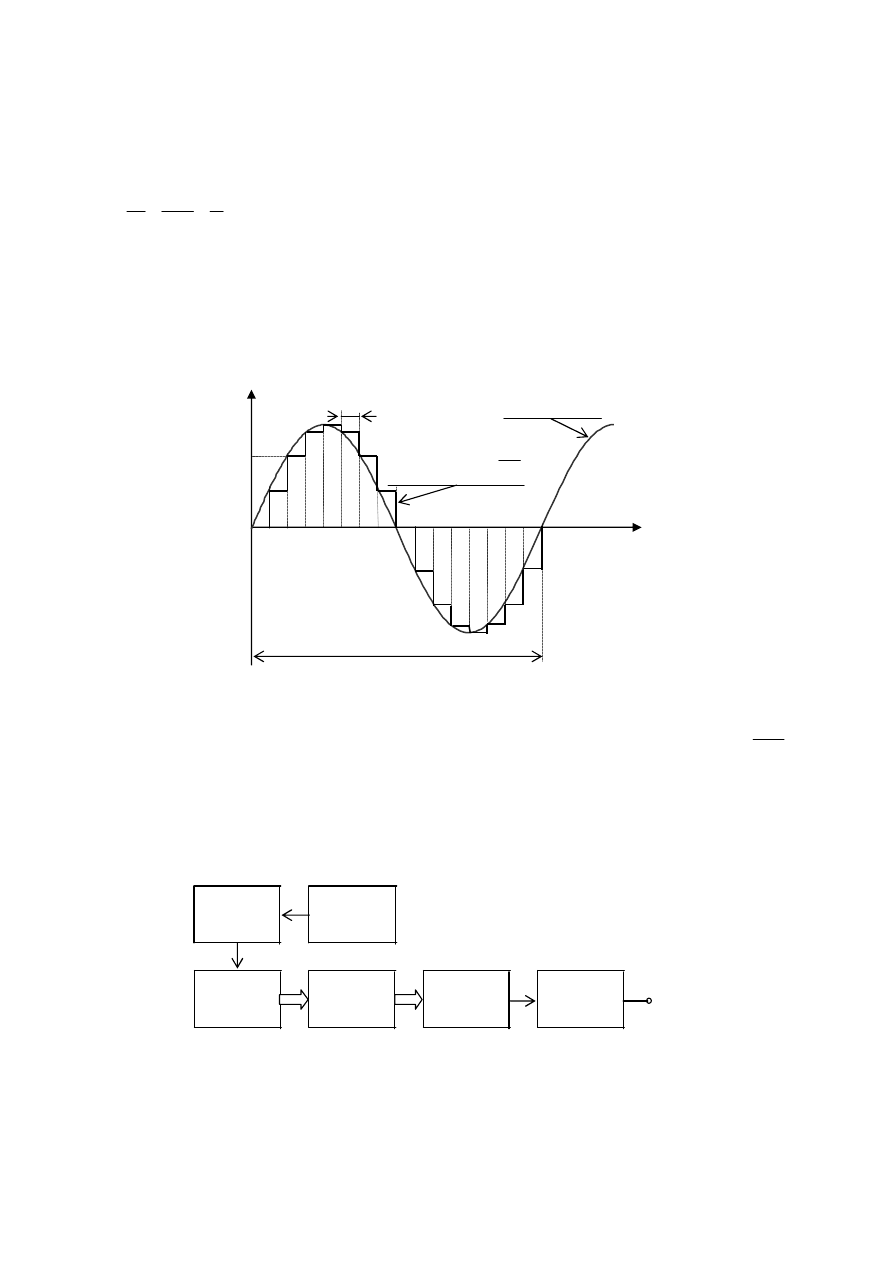
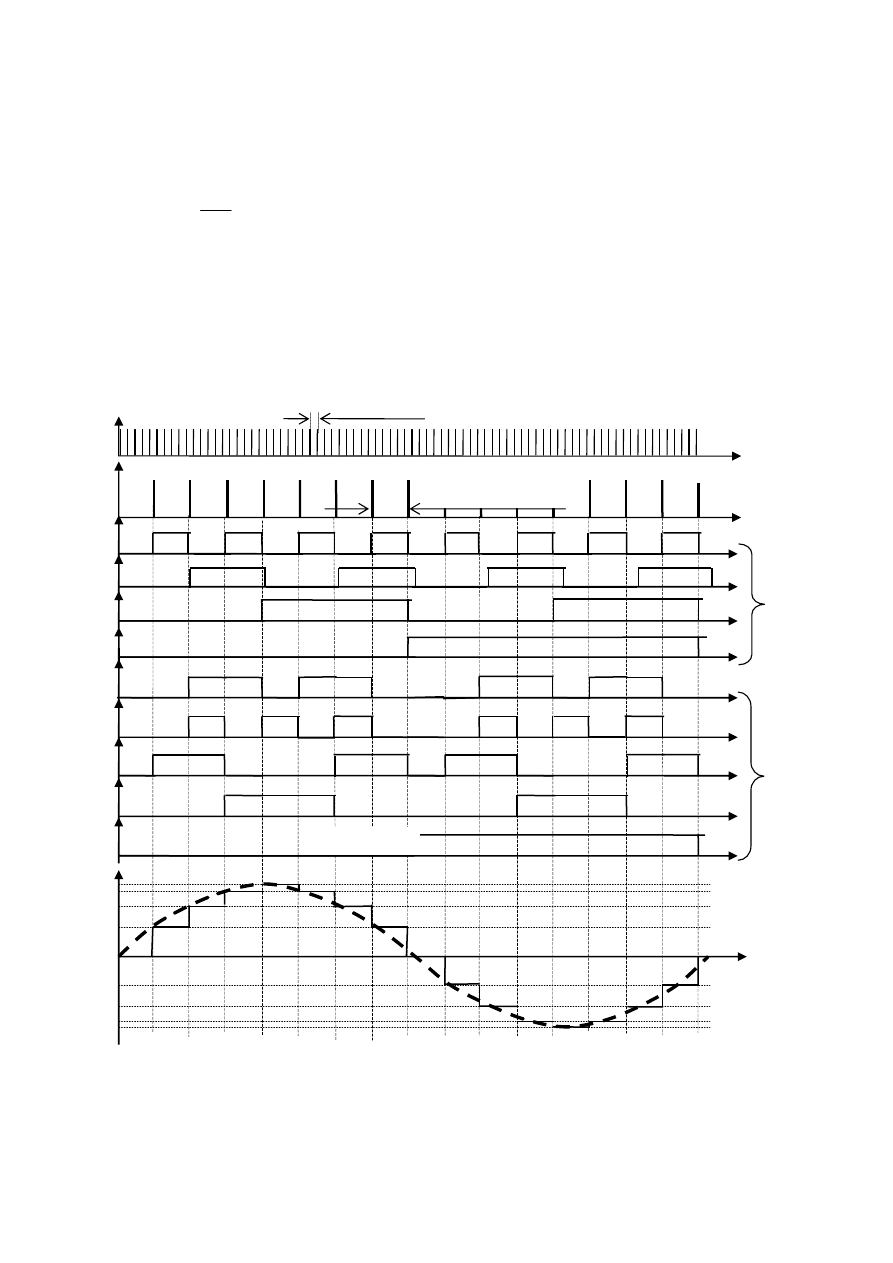
4. Generatory cyfrowe
Zasada pracy generatorów cyfrowych polega na przekształceniu kodu cyfrowego w sygnał analogowy. Sygnał
analogowy (np. sinusoidalny) aproksymowany jest funkcją otrzymaną z przetwornika C/A.
Zasada aproksymacji napięciem schodkowym.
Na rys. 10 podano przykład aproksymacji napięcia sinusoidalnego.
Napięcie sinusoidalne
( )
t
U
t
u
m
⋅
⋅
=
ω
sin
zostało aproksymowane napięciem schodkowym
(
)
n
i
U
T
i
u
m
⋅
⋅
=
∆
⋅
π
2
sin
.
Gdzie:
∆
T=T
s
= t
i
– t
i -1
– okres próbkowania,
n – liczba stopni przypadająca na jeden okres
( T ) formowanego napiecia,
T = n
⋅∆
T = n
⋅
T
s
Na rys. 11 przedstawiono uproszczony schemat funkcjonalny generatora cyfrowego.
Generator taktujący (zbudowany na kwarcu) generuje napięcie impulsowe o okresie T
kw
. Sygnał ten podawany jest na
dzielnik częstotliwości o regulowanym współczynniku podziału k. Na wyjściu dzielnika częstotliwości występuje
napięcie impulsowe o okresie k
⋅
T
kw
=
∆
T = T
s
(odpowiada to okresowi próbkowania).
Rys. 10. Aproksymacja napięcia sinusoidalnego napięciem
schodkowym.
u(i
⋅∆
t)
( )
⋅
=
∆
⋅
n
i
U
t
i
u
m
π
2
sin
∆
t
T = n
⋅∆
t
( )
t
U
t
u
m
ω
sin
⋅
=
u(t)
t
t
9
t
10
t
11
t
12
t
13
t
14
t
15
t
16
t
1
t
2
t
3
t
4
t
5
t
6
t
7
t
9
Sygnał ten podawany jest na licznik o pojemności „n”. Na wyjściu licznika otrzymuje się kod liczbowy – liczba „i”
zliczonych impulsów. Liczba „i” zmienia się od „0” do „n” co jeden.
Kod liczbowy z wyjścia licznika adresuje pamięć cyfrową w której zapisane są wartości funkcji (np. sinusoidy)
odpowiadajace danej liczbie „i”. Z wyjścia pamięci, zapisana w danej komórce o adresie „i” wartość, podawana jest na
przetwornik C/A.
Na wyjściu przetwornika C/A otrzymywane jest napięcie odpowiadające liczbie „i” (np. dla napięcia sinusoidalnego:
(
)
n
i
U
T
i
u
m
⋅
⋅
=
∆
⋅
π
2
sin
). Napięcie to utrzymuje się przez czas
∆
T do przyjścia na wejście pamięci następnego kodu
liczbowego (liczby „i + 1”). Po zliczeniu n-tego impulsu następuje przepełnienie licznika i jego stan wraca do zera.
Nowy cykl pracy rozpoczyna przyjście „n + 1” impulsu. Napięcie schodkowe z wyjścia przetwornika C/A podawane
jest na filtr m.cz. wygładzajacy uzyskany przebieg. Filtracja sygnału jest łatwa, ponieważ prążki najbliższe składowej
podstawowej to: n - 1, n +1, 2n -1, 2n +1 itd.
Na rys. 12 przedstawiono wykresy czasowe w kolejnych punktach generatora. Przyjęto następujace oznaczenia:
- a
0
÷
a
3
– bity wyjściowe licznika adresujące pamięć cyfrową, liczba n zapisana w naturalnym kodzie binarnym,
- b
0
÷
b
4
– m-bitowe słowo zapisujące w bipolarnym kodzie modułowym wartość funkcji zapisaną w adresowanej
komórce pamięci cyfrowej, najstarszy bit (w przykładzie b
4
) jest bitem znaku (przy czym „0” – wartość dodatnia; „1” –
wartość ujemna).
u
c/
a
Rys. 12. Wykresy czasowe w generatorze cyfrowym.
t
u
k
w
T
kw
=
1/f
kw
L
ic
zb
y
z
ap
is
an
e
w
a
m
ię
ci
A
d
re
s
p
am
ię
ci
b
4
a
3
b
3
b
2
a
2
a
1
b
1
a
0
1
0
b
0
t
t
t
t
t
t
t
t
t
t
1 2 3 4 5 6 7 8 9 10 11 12 13
14 15
16
t
T
s
= k
⋅
T
kw
Bit znaku

10
W praktyce generatory cyfrowe budowane są w oparciu o metodę bezpośredniej syntezy cyfrowej – DDS (direct
digital synthesis).
Podstawowe parametry metrologiczne:
Zakres częstotliwości :
<
1 mHz
÷
~15MHz,
regulacja częstotliwości : dyskretna (rozdzielczość regulacji do 0,1 mHz),
dokładność ustawienia częstotliwości : ~10 ppm ,
stabilność częstotliwości: 10 ppm.
Zakres napięcia: do 10V
pp
,
dokładność: ~
±
1%.
Kształt generowanego napięcia:
- napięcie sinusoidalne: h
<
0,1%,
- napięcie fali prostokątnej, fali trójkątnej,
- inne kształty sygnałów wyjściowych zaprogramowane na stałe w pamięci ROM oraz kształty dowolne zdefiniowane
przez użytkownika
( stąd nazwa generatorów: generatory przebiegów arbitralnych),
- generacja sygnałów zmodulowanych przy różnych rodzajach modulacji.
Sterowanie praca generatorów cyfrowych może odbywć się ręcznie (z płyty czołowej) lub zdalnie.
Generatory cyfrowe zastępują (a nawet przewyższają) pod względem wymagań użytkowych i metrologicznych
generatory pomiarowe m.cz., funkcji oraz częściowo generatory pomiarowe w.cz. i impulsów prostokątnych.
Podsumowanie: generatory cyfrowe są obecnie najbardziej uniwersalnymi źródłami sygnałów pomiarowych,
stosowanymi przy pomiarach tradycyjnych oraz w systemach pomiarowych.
11
Przyrządy pomiarowe badane w ćwiczeniu.
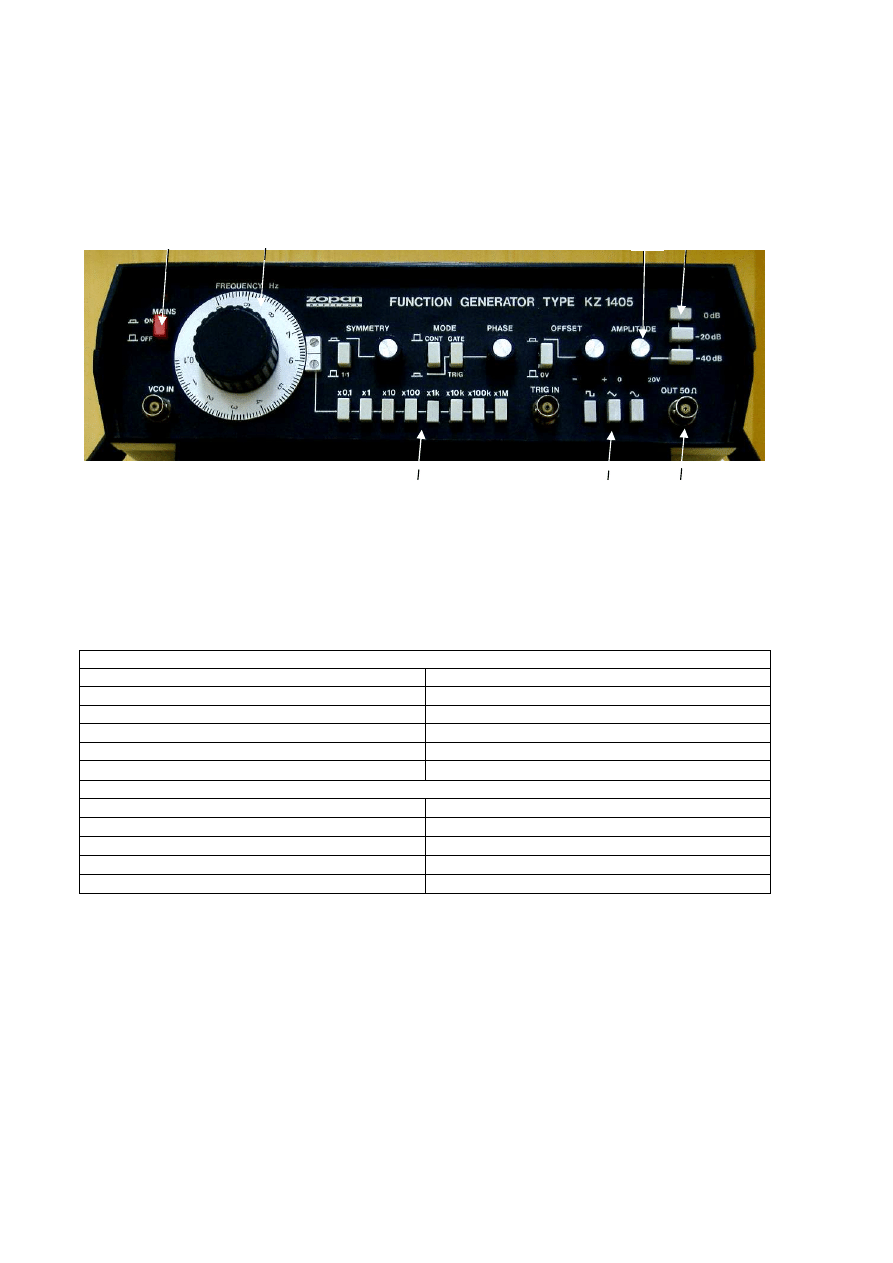
1. Generator funkcji typ KZ –1405
Widok płyty czołowej przyrządu i podstawowe elementy regulacyjne
1 – Zasilanie 5 – Przełącznik podzakresów częstotliwości
2 – Płynna regulacja częstotliwości 6 – Przełącznik wybory kształtu napięcia wyjściowego
3 – Płynna regulacja napięcia wyjściowego 7 – Wyjście napięciowe
4 – Przełącznik podzakresów napięcia wyjściowego
Podstawowe parametry metrologiczne
Kształt generowanego napięcia
sinusoidalny, trójkątny, prostokątny
Zakres częstotliwości
0,01 Hz
÷
10 MHz (w 8 podzakresach)
Dokładność skalowania
5%
Niestabilność częstotliwości
±
0,2 % / 15 min.
Zakres napięcia wyjściowego
do 20 V
Stałość napięcia przy zmianie częstotliwości
<
0,5 dB
Parametry charakteryzujące kształt napięcia wyjściowego
współczynnik zawartości harmonicznych „h”
<
1 %
nieliniowość
<
2 %
czas narastania i opadania zboczy t
N
, t
O
<
30 ns
współczynnik wypełnienia „
Θ
”
20 %
÷
80 %
R
wy
50
Ω
1
2
4
5
6
7
3
12
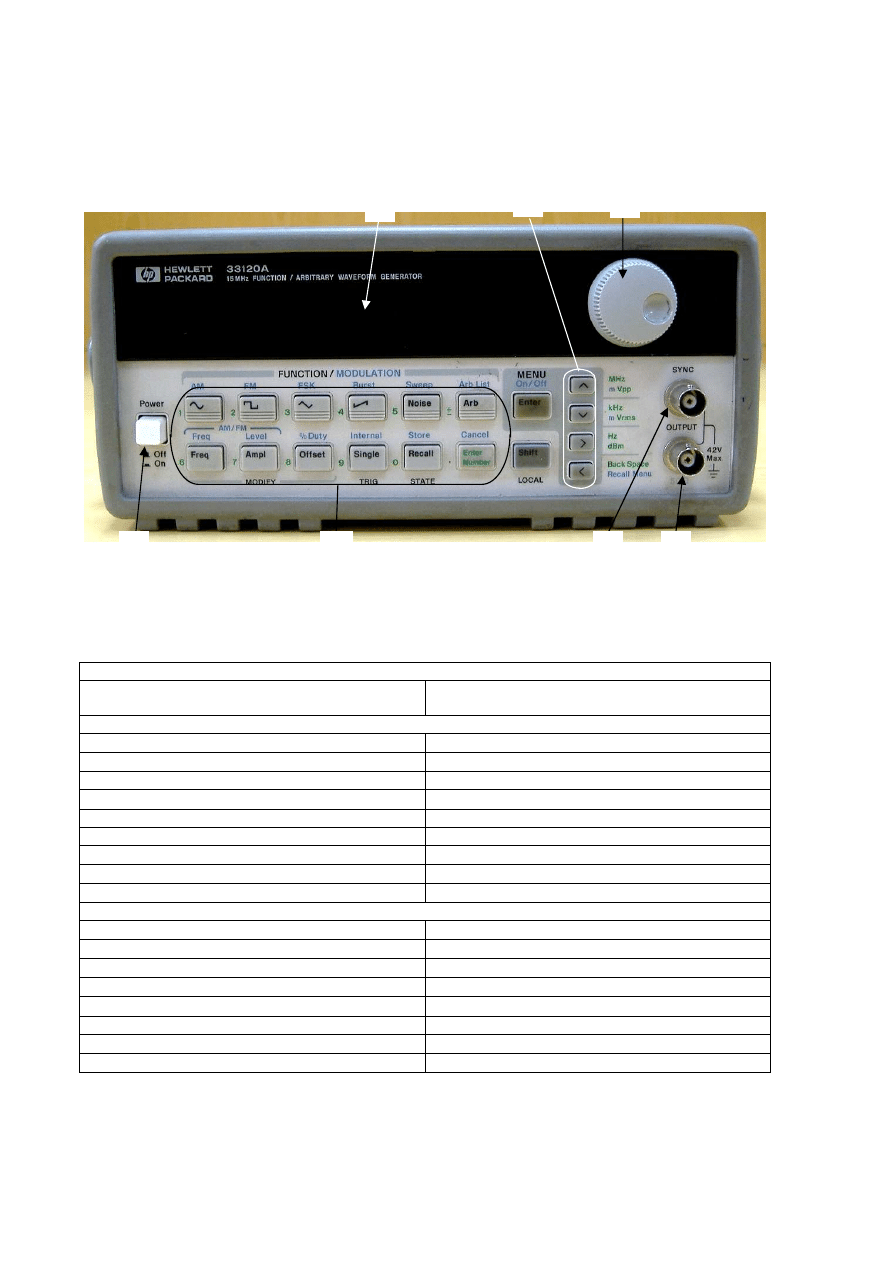
2. Generator cyfrowy typ HP33120A
Widok płyty czołowej przyrządu i podstawowe elementy regulacyjne
1 – Zasilanie 5 – Wskaźnik cyfrowy
2 – Klawisze funkcyjne i numeryczne 6 – Klawisze wyboru jednostek i regulacyjne
3 – Wyjście sygnału synchronizacji 7 – Pokrętło regulacji
4 – Wyjście sygnału napięciowego
Podstawowe parametry metrologiczne
Kształt generowanego napięcia
sinus, trójkąt, prostokąt, piła narastająca i opadająca,
szum, sygnały arbitralne
Zakres częstotliwości
sinus, prostokąt
100
µ
Hz
÷
15 MHz
trójkąt, piła narastająca i opadająca
100
µ
Hz
÷
100 kHz
szum
10 MHz
sygnały arbitralne
100
µ
Hz
÷
5 MHz
Dokładność
10 ppm
Stabilność częstotliwości
10 ppm/90 dni
Zakres napięcia wyjściowego
50 mV
p-p
÷
10 V
p-p
Dokładność ustawienia napięcia wyjściowego
±
1 %
Stałość napięcia przy zmianie częstotliwości
±
1%(do 100kHz),
±
2%(do 1MHz),
±
3,5%(do 15MHz)
Parametry charakteryzujące kształt napięcia wyjściowego
Współczynnik zawartości harmonicznych „h”
<
0,04 %
Czasy narastania i opadania zboczy
<
20 ns
Współczynnik wypełnienia
20 %
÷
80 %
Nieliniowość
<
0,1 %
R
wy
50
Ω
Rodzaje modulacji
AM, FM, FSK(kluczowanie częstotliwości), wobulacja
Zakres współczynnika głębokości modulacji „m”
0%
÷
120%
Zakres dewiacji częstotliwości „
∆
f”
10 mHz
÷
15 MHz
1
3
4
5
6
7
2
Wyszukiwarka
Podobne podstrony:
Ćwiczenie 3 (Wstęp) Metody Pomiaru Rezystancji i Impedancji
Cwiczenie 2 (Wstep) Oscyloskopy Analogowe id 99227
Cwiczenie 1 (Wstep) Oscyloskopy Cyfrowe id 99010
cwiczenia5 wstep id 124970 Nieznany
Ćwiczenie 2 (Wstęp) Pomiar Czasu, Częstotliwości i Fazy
Cwiczenie 12 wstep do OpenGl id 99118
Ćwiczenie 4 (Wstęp), Pomiary Napięcia Przemiennego
Cwiczenie 4 (Wstep) Pomiar Znieksztalcen Nieliniowy
Cwiczenie 09 Probne obciazenie id 125080
Eksploatowanie częstościomierzy, generatorów pomiarowych, mostków i mierników RLC
Cwiczenia nr 10 (z 14) id 98678 Nieznany
Pomiarydc id 374638 Nieznany
Cwiczenie nr 2 Rysowanie precyzyjne id 99901
KOZ (Cw) Cwiczenie 10 Przyk A3 id 249078
Cwiczenia nr 13 RPiS id 124686 Nieznany
Cwiczenie 17 Wzor sprawozdania id 125192
Cwiczenia nr 13 (z 14) id 98681 Nieznany
Ćwiczenie NR 6 RAMIE POMIAROWE 2016
GENERATORY 1213 id 187311 Nieznany
więcej podobnych podstron