Laboratorium Elektrokonstrukcji Pojazdów Trakcji Elektrycznej
Temat:
Badanie przekształtnika zasilającego silnik szeregowy
w pojazdach trakcyjnych.
Zakład Trakcji Elektrycznej
IME PW 2013
1
1.
Wprowadzenie
Jednym z zasadniczych powodów stosowania tyrystorowych przekształtników DC/DC w
układach napędowych pojazdów były możliwości stosowania bezoporowej regulacji napięcia
zasilającego silniki, co, poza znacznym uproszczeniem struktury obwodów głównych
pojazdów trakcyjnych pozwalało na zmniejszenie strat rozruchowych. Stosowanie tego typu
układów umożliwia ponadto na istotne polepszenie własności regulacyjnych układu
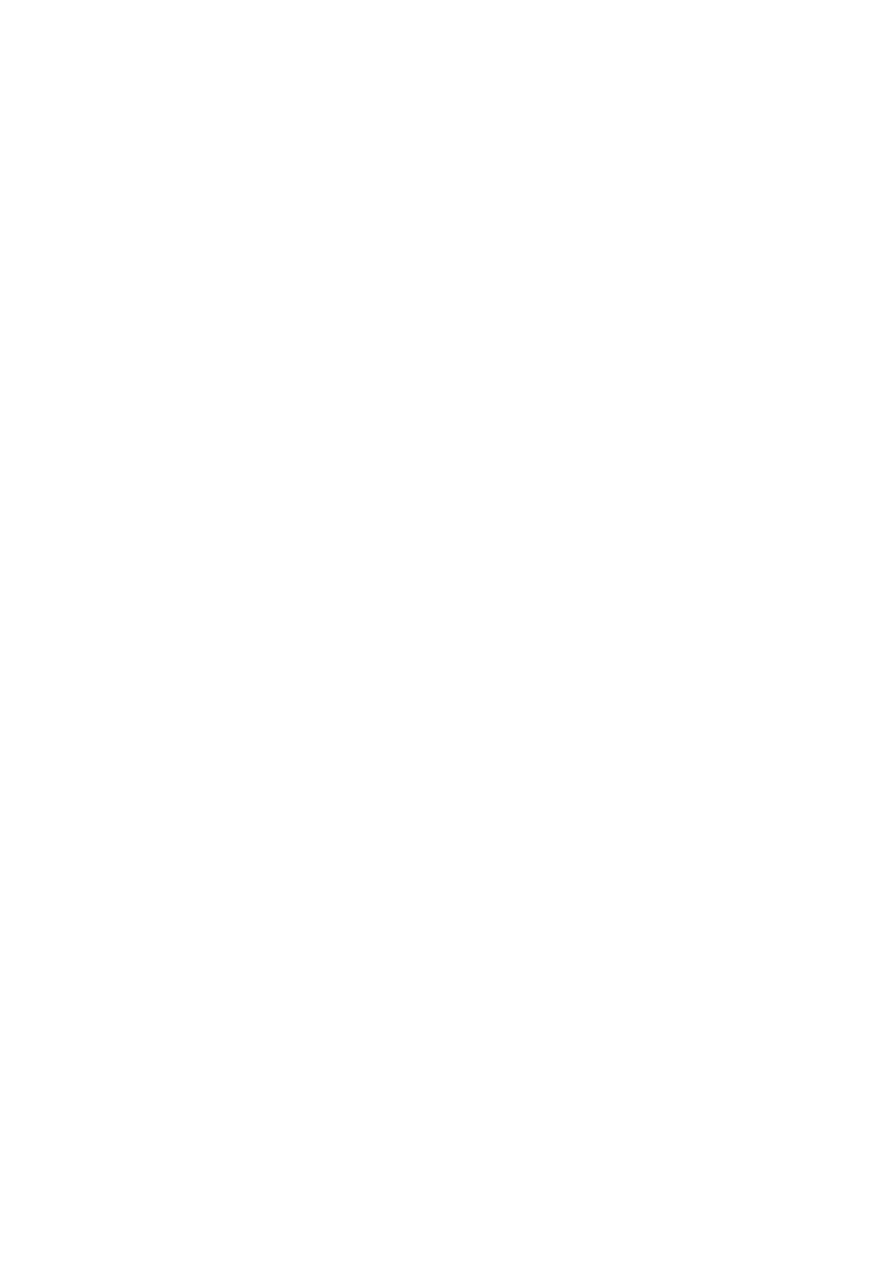
napędowego. Klasyczne rozwiązanie układu zasilania maszyny prądu stałego z
wykorzystaniem przerywacza prądu stałego wykorzystywanego do regulacji napięcia
zasilającego silnik prądu stałego, można przedstawić w postaci jak na rys. 1. Elementem
regulującym napięcie zasilające silnik jest przerywacz prądu stałego PPS. Przy zasilaniu z
sieci trakcyjnej na wejściu układu znajduje się dolnoprzepustowy filtr LC. Podstawowe
rozwiązanie układu przerywacza z komutacją pojemnościową, jest pokazane na rys 2.
Parametry filtru dobierane są zwykle na podstawie dopuszczalnych tętnień napięcia na
wejściu układu przekształtnika i dopuszczalnych tętnień prądu w linii zasilającej. Parametry
przekształtnika dobierane są na podstawie zakładanych maksymalnych wartości prądu
obciążenia i napięcia zasilającego. Pojemność komutacyjna jest wyznaczana na podstawie
znanych, lub zakładanych wartości czasów wyłączania tyrystorów i minimalnej wartości
napięcia zasilającego.
L
F
C
F
D
0
R
s
L
s
E
s
PPS
I
F
I
s
I
s
I
0
I
s
Rys. 1.Schemat zastępczy obwodu głównego pojazdu trakcyjnego z silnikiem szeregowym.

2
Zmiany prądu wejściowego
i
t
we
( ) i wyj
ś
ciowego i
t
wy
( ) a tak
ż
e napi
ę
cia wyj
ś
ciowego
u
t
wy
( ) i wej
ś
ciowego u
t
we
( ) s
ą
zale
ż
ne s
ą
od wypełnienia impulsów doprowadzanych do
odbiornika,
wielko
ś
ci
pojemno
ś
ci
komutacyjnej,
indukcyjno
ś
ci
układu,
siły
elektromotorycznej indukowanej w silniku oraz parametrów filtru wej
ś
ciowego o parametrach
zale
ż
nych od zakładanych lub dopuszczalnych t
ę
tnie
ń
napi
ę
cia i pr
ą
du wej
ś
ciowego układu.
W czasie, gdy ł
ą
cznik PPS jest zamkni
ę
ty (przewodzi pr
ą
d), na silniku szeregowym (
obci
ąż
eniu) wyst
ę
puje napi
ę
cie w przybli
ż
eniu równe napi
ę
ciu zasilania U
z
( oprócz chwili
wyst
ę
powania procesu komutacji). Po wył
ą
czeniu ł
ą
cznika PPS ( ł
ą
cznik otwarty-nie
przewodzi pr
ą
du) napi
ę
cie odbiornika jest równe zeru ( dla obci
ąż
enia indukcyjnego, kiedy
jest dioda zwrotna D
o
i zamyka si
ę
przez ni
ą
pr
ą
d obci
ąż
enia napi
ę
cie odbiornika jest równe
napi
ę
ciu przewodzenia diody). Silnik szeregowy jest odbiornikiem o charakterze
rezystancyjno-indukcyjnym, to dla unikni
ę
cia przepi
ę
cia przy przerywaniu pr
ą
du nale
ż
y
zastosowa
ć
diod
ę
rozładowcz
ą
D
o
. Dioda ta w przedziale czasu, gdy ł
ą
cznik znajduje si
ę
w
stanie blokowania, przewodzi pr
ą
d silnika płyn
ą
cy pod wpływem energii elektromagnetycznej
zgromadzonej w silniku. Napi
ę
cie
ś
rednie odbiornika, zasilanego przez cykliczne zał
ą
czany i
wył
ą
czany ł
ą
cznik - przerywacz pr
ą
du stałego (czoper) - jest proporcjonalne do napi
ę
cia
ź
ródła zasilaj
ą
cego i do wzgl
ę
dnego czasu przewodzenia pr
ą
du przez ł
ą
cznik.
U
o
=U
z
*(t
p
/T) (1)
gdzie: U
o
- warto
ść
ś
rednia napi
ę
cia na odbiorniku, T- okres przebiegu impulsowego napi
ę
cia
odbiornika, t
p
-czas przewodzenia pr
ą
du przez ł
ą
cznik w jednym cyklu pracy ł
ą
cznika.
Zmieniaj
ą
c warto
ść
stosunku t
p
/T ( tzw. wypełnienie impulsu) zmienia si
ę
jednocze
ś
nie
warto
ść
ś
redni
ą
napi
ę
cia na silniku.
2.
Przerywacz tyrystorowy z szeregowym układem komutacyjnym
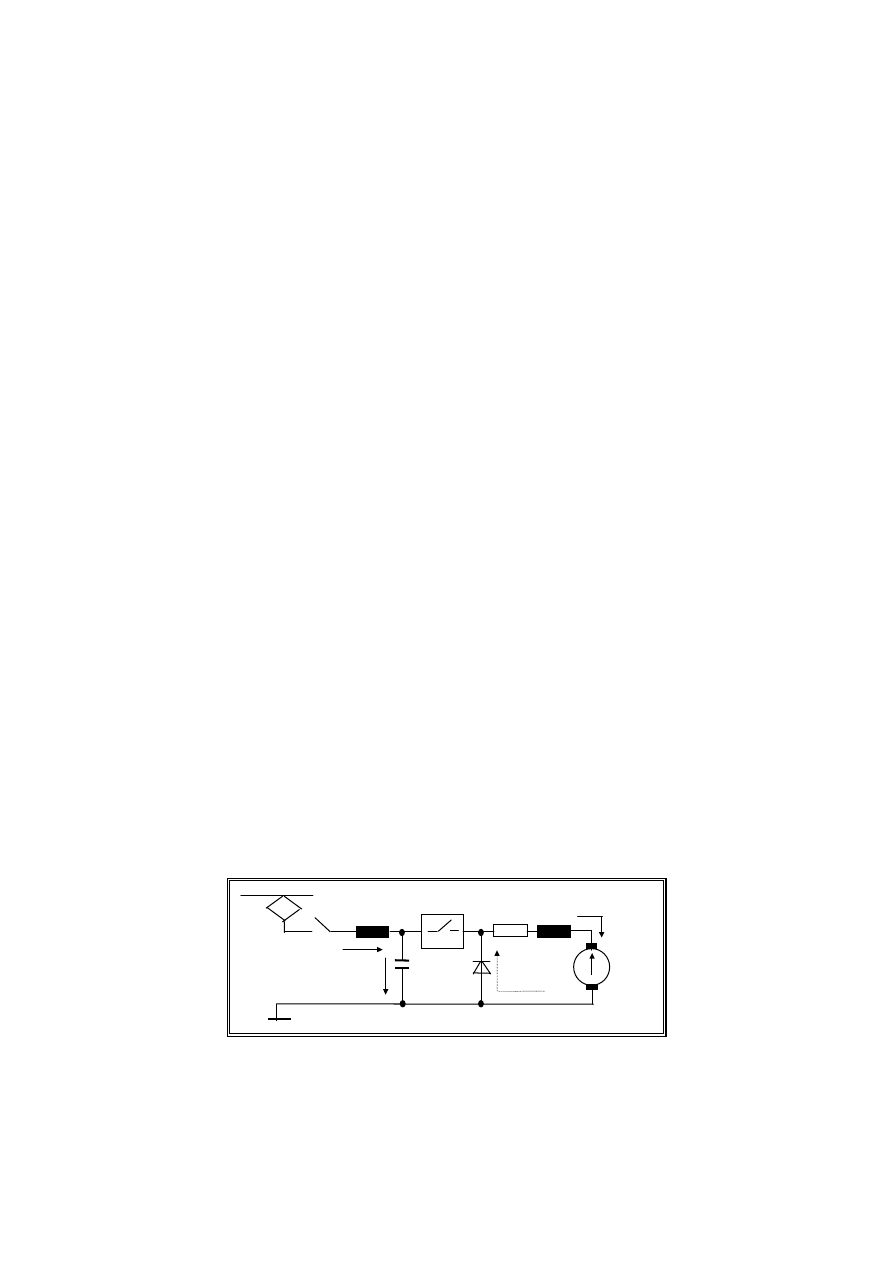
W układzie przerywacza tyrystorowego z szeregowym układem komutacyjnym
,
obwód komutacyjny poł
ą
czony jest szeregowo z obci
ąż
eniem. Uproszczony schemat układu
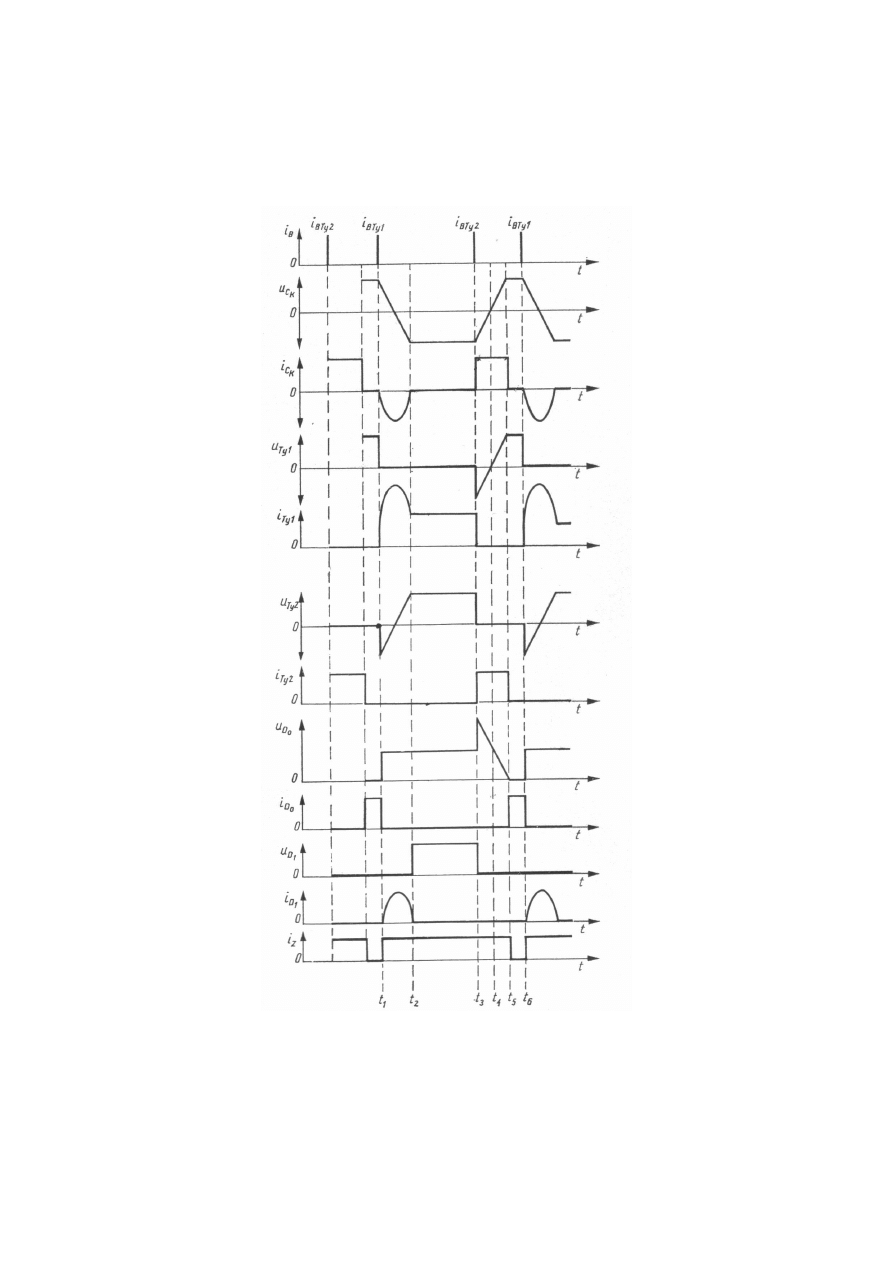
przedstawiony jest na rys 2. Prac
ę
układu wyja
ś
niaj
ą
przedstawione na rysunku 3 wykresy
przebiegów napi
ęć
i pr
ą
dów w jednym cyklu. Praca układu rozpoczyna si
ę
od wł
ą
czenia
3
tyrystora pomocniczego Ty2 (tylko przy pierwszym cyklu pracy układu gdy napięcie na
kondensatorze ma wartość zero). Następuje wówczas naładowanie kondensatora C
k
poprzez
obwód silnika do wartości napięcia źródła U
z
i biegunowości zaznaczonej na rys. 2 (bez
nawiasów). Praca układu w kolejnym cyklu odbywa się następująco: W chwili t
1
włączony
zostaje tyrystor główny Ty1. Przejmuje on prąd i
s
silnika zamykający się uprzednio w
obwodzie zwartym diodą
D
0
.
Jednocześnie z włączeniem tyrystora Ty1 następuje oscylacyjne
przeładowanie kondensatora C
k
poprzez indukcyjność L
p
i diodę D1. Przeładowanie
kondensatora C
k
do biegunowości zaznaczonej na rys. 2 (w nawiasach) odbywa się w
przedziale czasu t
1
–t
2
, który stanowi połowę okresu drgań oscylacyjnych obwodu
przeładowania. W chwili t
3
włączony zostaje tyrystor Ty2, który dzięki odpowiedniemu
ładunkowi kondensatora C
k
powoduje przyłożenie do zacisków tyrystora Ty1 napięcia o
odwrotnej biegunowości niż napięcie źródła. Prąd z tyrystora Ty1 zostaje natychmiast przejęty
przez gałąź zawierającą kondensator C
k
i tyrystor Ty2. W rezultacie w chwili t
3
zanika prąd w
tyrystorze Ty1. W dalszej części cyklu w przedziale czasu t
3
–t
5
zachodzi proces ponownego
ładowania kondensatora C
k
do wartości napięcia źródła. W przedziale czasu t
5
–t
6
prąd w
silniku utrzymuje się dzięki uprzednio zmagazynowanej w jego polu magnetycznym energii i
zamyka się w obwodzie diody D
o
. W następnych cyklach pracy procesy te powtarzają się.
Ty
1
T
y2
D
1
D
0
L
s
R
s
C
k
U
Z
U
CK
i
2
i
k
i
0
i
s
E
s
= c i
s
Ω
[+]
[-]
L
p
U
S
U
ty1
U
D1
(+)
(-)
Rys. 2. Schemat ideowy przekształtnika z szeregowym układem komutacyjnym; S — silnik,
Do — dioda bocznikująca silnik, Ty1—tyrystor główny, Ty2—tyrystor komutacyjny, D1—
dioda pomocnicza, Lp — indukcyjność przeładowcza,
C
k
— kondensator komutacyjny, Uz
— napięcie zasilające

4
2.1 Analiza zależności w idealnym przekształtniku.
Analizie poddano schemat wg rys. 2 i przebiegi wg. rys.3. W celu uproszczenia obliczeń i
wyeliminowania z nich czynników nie mających istotnego wpływu
na zależności
obowiązujące w przekształtniku, można wprowadzić następujące założenia:
–
tyrystory i diody są łącznikami idealnymi, tzn. o rezystancji równej zeru dla stanu
przewodzenia i rezystancji nieskończenie dużej dla stanu zaworowego,
–
rezystancja cewki przeładowczej R
p
= 0,
–
pulsacja prądu w silniku jest znikomo mała i pomijalna.
W przedziale czasu t
1
– t
2
mamy:
u
Ty1
= 0, u
s
= U
z
, i
Do
= 0, i
z
= I
s
, i
Ty2
= 0, u
D1
= 0.
Dla pozostałych wielkości w obwodzie obowiązują następujące równania:
.
0
dt
du
C
i
,
0
dt
di
L
u
i
I
i
Ck
k
1
D
1
D
p
Ck
1
Ty
s
1
D
=
+
=
+
=
+
(2a,b,c)
Rozwiązując równania (2) względem U
Ck
otrzymujemy
0
U
dt
u
d
Ck
2
0
2
Ck
2
=
ω
+
(3)
gdzie
k
p
0
C
L
1
=
ω
.
Równanie charakterystyczne dla zale
ż
no
ś
ci (3) ma pierwiastki
0
2
,
1
ω
j
p
±
=
.
(4)
Wida
ć
wi
ę
c,
ż
e przebieg w przedziale czasu t
1
– t
2
ma charakter oscylacyjny.
Z warunków pocz
ą
tkowych
0
)
(
2
1
=
=
t
t
Ty
i
z
t
t
Ck
U
u
=
=
)
(
1
5
wynikają rozwiązania równań (2) dla
2
1
t
t
t
≤
≤
:
(
)
1
0
p
k
z
1
D
t
t
sin
L
C
U
i
−
ω
=
,
(5)
(
)
1
0
p
k
z
s
1
Ty
t
t
sin
L
C
U
I
i
−
ω
+
=
(6)
(
)
1
0
z
Ck
t
t
sin
U
u
−
ω
=
.
(7)
Proces przeładowania kondensatora ze względu na obecność w obwodzie oscylacyjnym diody
D1 zostaje zakończony po 1/2 okresu oscylacji i wówczas dla chwili t = t
2
, prądy i
Ck
oraz i
D1
osiągają wartość równą zeru, a zatem
k
p
1
2
1
C
L
t
t
t
π
=
−
=
∆
(8)
Z równa
ń
(5) i (??/?) wynika,
ż
e w chwili t = t
2
b
ę
dzie
s
1
Ty
I
i
=
,
z
Ck
U
u
−
=
,
Warto
ś
ci i
Ty1
oraz u
Ck
pozostaj
ą
stałe do czasu t = t
3
, tj. do chwili wł
ą
czenia tyrystora Ty2.
Czas t
3
- t
1
jest to podstawowy cykl pracy układu.
Ponadto w przedziale czasu t
2
– t
3
obowi
ą
zuj
ą
nast
ę
puj
ą
ce warto
ś
ci:
u
Ty1
=0, u
s
= U
z
, i
z
= I
s
i
D0
= 0,
i
Ty2
= 0, u
Ty2
= U
z
, u
D1
= U
z
, u
D0
= U
z
.
Długo
ść
przedziału czasowego
∆
t
2
= t
3
– t
2
jest zale
ż
na od cz
ę
stotliwo
ś
ci pracy układu.
Wobec tego czas, w którym tyrystor Ty1 pozostaje w stanie przewodzenia, wynosi
2
k
p
2
1
z
t
C
L
t
t
t
∆
+
π
=
∆
+
∆
=
(9)
W nast
ę
pnym przedziale czasu
∆
t
3
= t
5
– t
3
odbywa si
ę
proces komutacji po wł
ą
czeniu
tyrystora Ty2. W przedziale tym stałe s
ą
nast
ę
puj
ą
cej wielko
ś
ci:
i
Ty1
= 0, i
D0
= 0, i
D1
= 0, i
Ty2
= I
s
,
i
z
= I
s
, u
D1
= 0.
Dla pozostałych wielko
ś
ci obowi
ą
zuje nast
ę
puj
ą
cy układ równa
ń
:
u
Ck
+ u
s
= U
z
,
U
ty1
= U
Ck
,
6
s
Ck
k
I
dt
du
C
=
(10)
Wartość napięcia kondensatora komutującego C
k
w chwili t
3
, wynosi
u
Ck
= -U
z
a w przedziale czasu t
3
– t
5
mamy
)
t
t
(
C
I
U
2
u
3
k
s
z
s
−
−
=
(11)
z
3
k
s
ck
U
)
t
t
(
C
I
u
−
−
=
(12)
W chwili t
5
u
Ck
= U
z
.
Przedział czasu
∆
t
3
, można określić z zależności (12):
s
k
z
3
5
3
I
C
U
2
t
t
t
⋅
=
−
=
∆∆∆∆
(13)
Czas t
j
, w którym tyrystor Ty1 powinien odzyskać zdolność blokowania, wynosi połowę
czasu
∆
t
3
i musi być większy od czasu wyłączania tyrystora t
q
a więc
q
s
k
z
j
t
I
C
U
t
f
=
(14)
W kolejnym przedziale czasowym
∆
t
4
= t
6
– t
5
rozpatrywane wielko
ś
ci wynosz
ą
:
i
ty1
= 0, u
Ty1
= U
z
, u
Ck
= U
z
, i
Ty2
= 0, u
Ty2
= 0, u
s
= 0, i
D0
= I
s,
u
D0
= 0,
i
z
= 0
W chwili t
6
nast
ę
puje zako
ń
czenie cyklu pracy.
Suma czterech charakterystycznych przedziałów czasu stanowi okres T:
T =
∆
t
1
+
∆
t
2
+
∆
t
3
+
∆
t
4
(15)
Na podstawie wykresów z rys. 4 mo
ż
na okre
ś
li
ć
warto
ś
ci
ś
rednie napi
ę
cia silnika i pr
ą
du
zasilania w czasie jednego cyklu:
(
)
( )
3
z
3
z
z
s
t
T
U
t
t
T
U
U
∆
≈
∆
+
=
(16)
(
)
( )
3
s
3
z
s
z
t
T
I
t
t
T
I
I
∆
≈
∆
+
=
(17)
Oprócz powy
ż
szych zale
ż
no
ś
ci nale
ż
y mie
ć
na uwadze,
ż
e w idealnym przekształtniku, który
rozpatrujemy, a w którym nic wyst
ę
puj
ą
ż
adne straty energii, obowi
ą
zuje zale
ż
no
ść
:
7
U
z
I
z
= U
s
I
s
(18)
Rys. 3. Uproszczone wykresy przebiegów napięć i prądów dla poszczególnych elementów
układu wg. Rys 2. (i
BTy1
, i
BTy2
– impulsy bramkowe tyrystorów T
y1
,T
y2
, -t
1
..t
6
– chwile
czasowe wg. objaśnień w tekście.
8
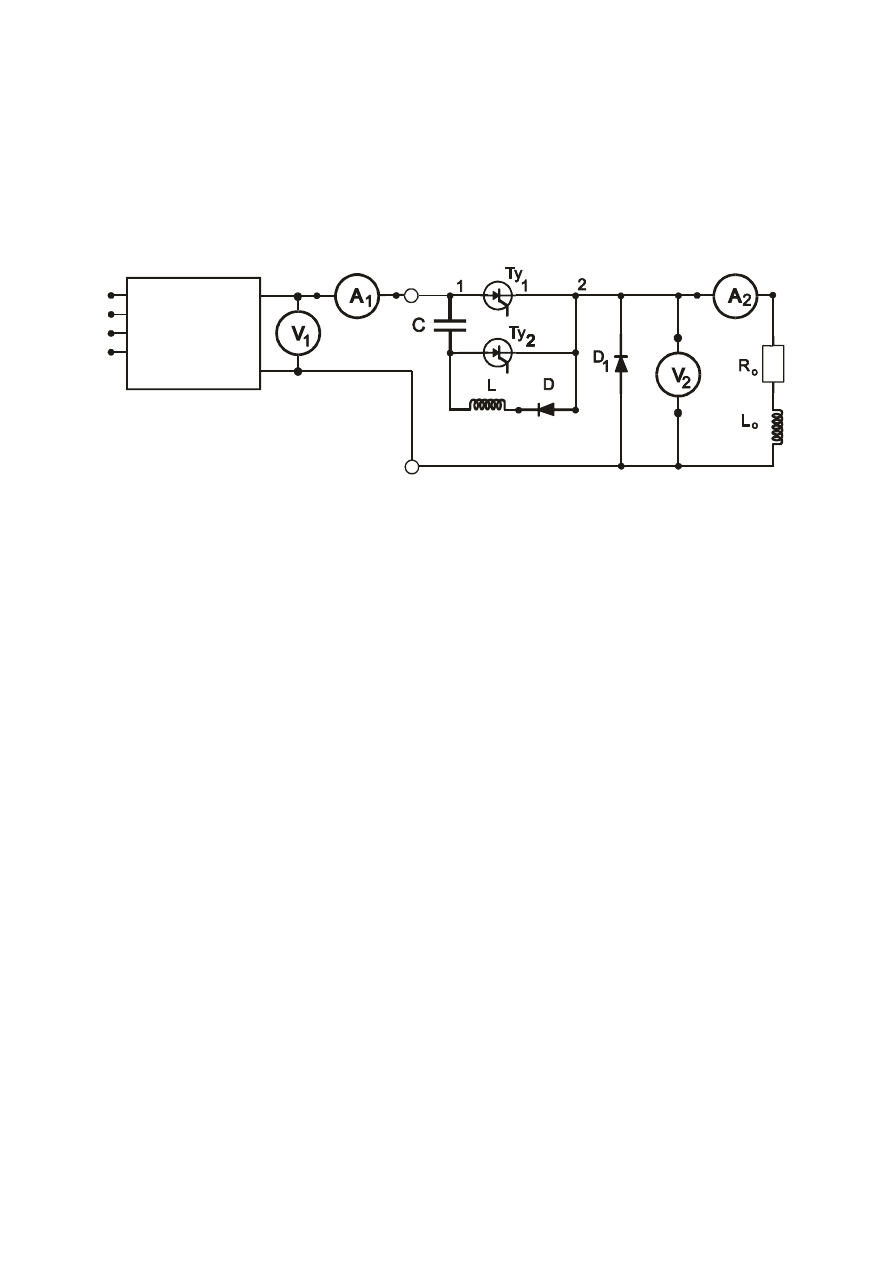
3. Przebieg ćwiczenia
TPF
Rys. 4 Schemat stanowiska laboratoryjnego
Schemat stanowiska laboratoryjnego przedstawiony jest na rys. 4. W skład stanowiska
wchodzą: 1)-układ TPF, transformator trójfazowy, prostownik mostkowy, filtr. 2)- przerywacz
tyrystorowy PT. 3)- odbiornik układ rezystorów R
o
(R1 i R2) oraz indukcyjność L
o
. 4)- układy
pomiarowo rejestrujące.
Pomiary miernikami analogowymi: U1-wartość średnia napięcia zasilania czopera. I1-wartość
ś
rednia prądu zasilania czopera. U2-wartość średnia napięcia na odbiorniku. I2-wartość
ś
rednia prądu odbiornika. W szereg z amperomierzem I2 włączony jest dodatkowo
amperomierz cyfrowy.
Rejestracja napięć dokonywana przez oscyloskop cyfrowy może być tylko realizowana z
wykorzystaniem układów hallotronowych (separacja galwaniczna oscyloskopu od masy
obiektu). Odczyty wskazań z oscyloskopu z uwagi, że pomiar odbywa się za pomocą
separatorów galwanicznych należy pomnożyć przez współczynnik skali dla pomiaru
napięcia i prądu.
Punkt 1.
Dla rezystancji obciążenia R1 i R2 dokonaj pomiarów w funkcji wypełnienia
wielkości określonych w tabeli 1 i dokonaj obliczeń wg podanych wzorów, wyniki wpisz do
tabeli 2.
9
U1-wartość średnia napięcia zasilania czopera. I1-wartość średnia prądu zasilania czopera.
U2-wartość średnia napięcia na odbiorniku. I2-wartość średnia prądu odbiornika.
Tabela 1
Lp
t
1
[ms]
t
2
[ms]
t
3
[ms]
t
4
[ms]
t
5
[ms]
t
6
[ms]
U1
[V]
I1
[A]
U2
[V]
I2
[A]
f=1/(t
6
-t
1
)
[Hz]
Obliczenia
γ
1=U2/U1 ;
γ
1
teo
=( t
3
- t
1
)/T (gdzie T=t
6
-t
1
); U
ś
r1
=U1*
γ
1
teo
Moc wejściowa P
we
= U1*I1;
P
wyj.
=U2*I2
Tabela 2
LP
γ
1
γ
1
teo
U
ś
r1
[V]
U2
z tabeli 1
P
we
[W]
P
wyj
[W]
1
2
Punkt 2
Dla wypełnienia
γ≈
0.3 i
γ≈
0.6 dla dwóch rezystancji obciążenia R1 i R2 narysuj przebieg
napięcia wyjściowego, określ jego parametry (min. wartość maksymalną , czas przebiegu, itp),
w szczególności zbocze narastające. Narysuj dokładnie to zbocze ( zwiększ częstotliwość
generatora podstawy czasu), czy jego przebieg zależy od wartości obciążenia.
Przedstaw
wnioski z przeprowadzonych pomiarów i obserwacji.
.................................................................................................................................................
Punkt 3
Dla wypełnienia
γ≈
0.3 i
γ≈
0.6 i obciążenia R1 L
o
narysuj przebieg napięcia wyjściowego ,
określ jego parametry (wartość maksymalną , czas przebiegu). Porównaj przebiegi dla
obciążenia (R1 L
o
)i R1 , wyjaśnij różnice w kształcie przebiegu.

10
Punkt 4
Dla obciążenia R1 i R2 oraz
γ≈
0.3 i
γ≈
0.6 narysuj przebieg napięcia na kondensatorze w
czasie przeładowania rezonansowego, określ parametry ( amplitudę częstotliwość) , uzasadnij
wyniki pomiarów.
4. Pytania
1. Wyjaśnij zasadę pracy tyrystorowego przerywacza prądu stałego.
2. W przypadku gdy tyrystor główny Ty1 zastąpimy tranzystorem to czy ulegnie
zmianie przebieg napięcia wyjściowego (jego kształt) , a jeżeli tak to dlaczego?
3. Dlaczego w pojeździe trakcyjnym do zasilania silnika szeregowego stosujemy przerywacze
(czopery)?
4. Jaki parametry i dlaczego wpływają na ograniczenie częstotliwości pracy
przerywacza oraz amplitudę prądu ?
5.
Literatura
Kacprzak J. , Koczara W. Podstawy napędu elektrycznych pojazdów trakcyjnych WKŁ
Warszawa 1960
Kaźmierkowski M., Tunia H. Automatyka napędu przekształtnikowego. PWN Warszawa
1987
Podoski J., KacprzakJ,. Mysłek J. Zasady trakcji elektrycznej.
,
Wyszukiwarka
Podobne podstrony:
cw med 5 id 122239 Nieznany
cw excel3 id 166408 Nieznany
cw 6 podobienstwo id 122439 Nieznany
cw 13 id 121763 Nieznany
Cw mikrob 2 id 122249 Nieznany
K4 id 229767 Nieznany
CW K2 id 217375 Nieznany
cw mocz id 100534 Nieznany
cw med 2 id 122233 Nieznany
cw 11 id 122151 Nieznany
Instrukcja cw 3 PI id 216486 Nieznany
cw 1 ZL id 100327 Nieznany
CW 08 id 122562 Nieznany
cw 12 id 122179 Nieznany
cw excel2 id 122222 Nieznany
A ET cw 6 MRJ3A id 49207 Nieznany (2)
Fundamentowanie cw cz 2 id 181 Nieznany
MD cw 08 id 290129 Nieznany
MD cw 02 id 290123 Nieznany
więcej podobnych podstron