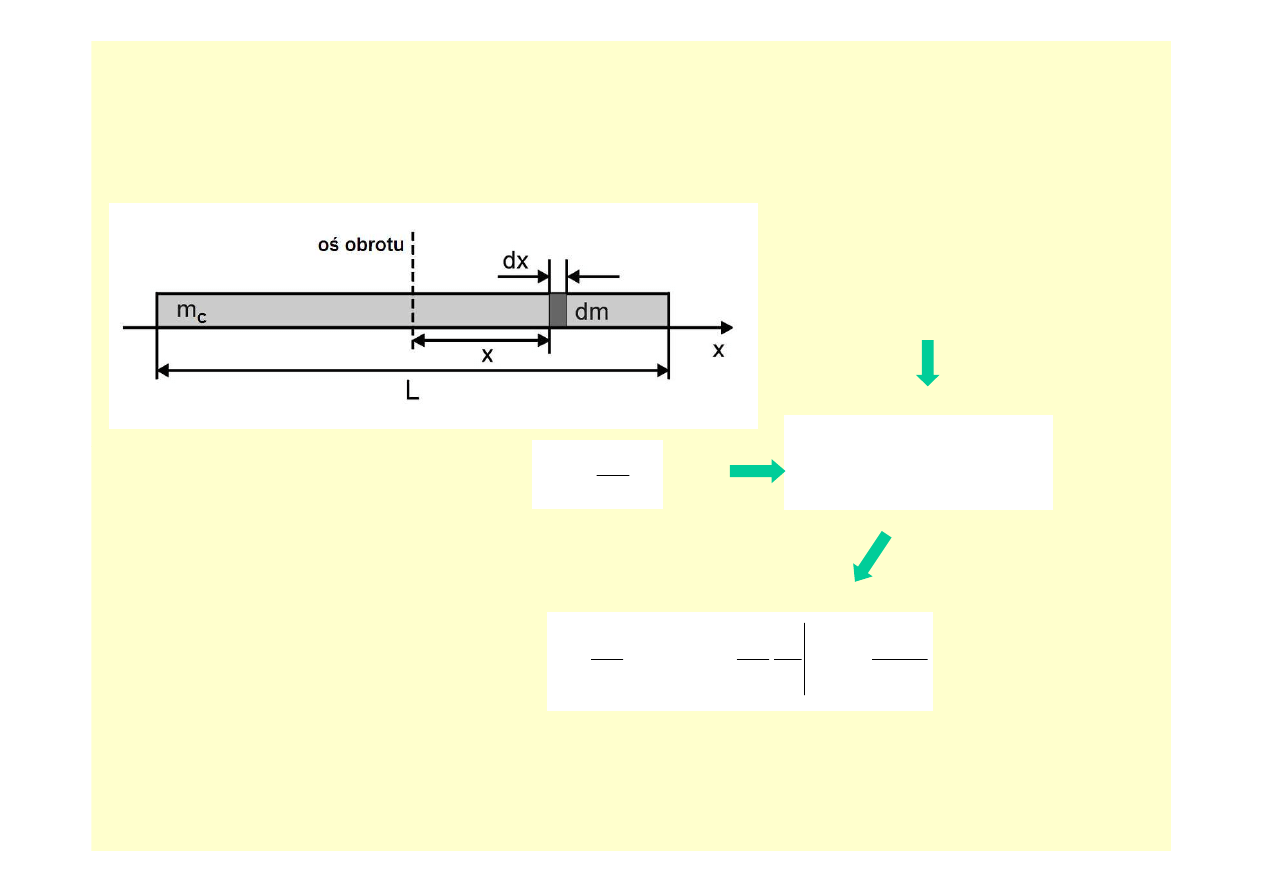
Przykład:
liczenie momentu bezwładno
ś
ci pr
ę
ta o masie M i długo
ś
ci L.
Moment bezwładno
ś
ci elementu
o masie dm wynosi x
2
dm
∫
∑
=
=
2
/
2
2
d
d
L
m
x
m
x
I
m
∫
∑
−
=
=
2
/
2
2
d
d
L
i
i
i
m
x
m
x
I
x
L
m
m
c
d
d
=
je
ż
eli pr
ę
t ma stał
ą
g
ę
sto
ść
:
12
3
d
2
2
/
2
/
3
2
/
2
/
2
L
m
x
L
m
x
x
L
m
I
c
L
L
c
L
L
c
=
=
=
−
−
∫
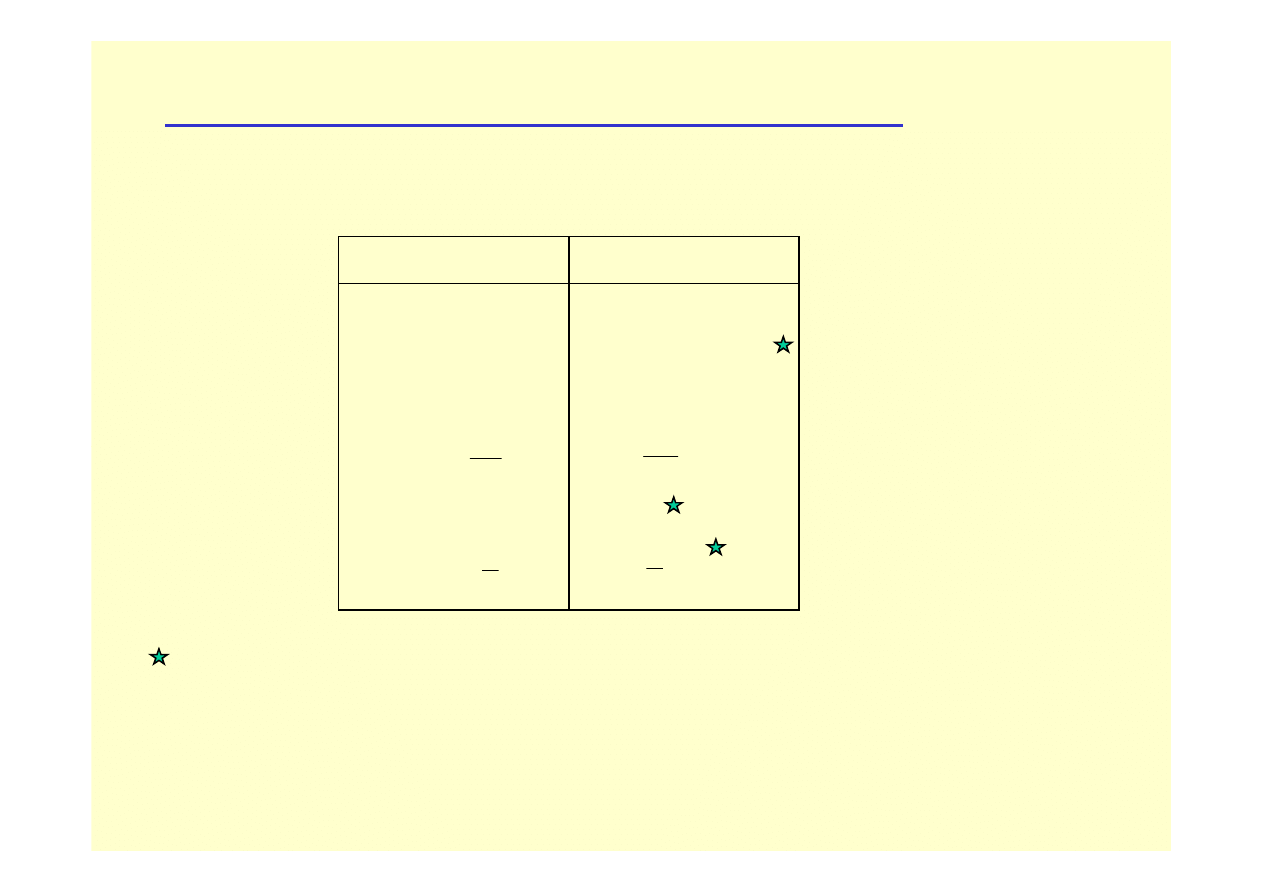
Ruch post
ę
powy
Ruch obrotowy
d
m
m
=
=
p
F
F
v
p
a,
v,
r,
d
,
Ι
I
=
×
=
=
×
=
L
M
F
r
M
ω
L
p
r
L
ε,
ω,
,
ϕϕϕϕ
Analogie ruchu obrotowego do ruchu post
ę
powego
2
2
1
d
d
v
m
E
m
t
k
=
=
=
a
F
p
F
2
2
1
d
d
Iω
E
I
t
k
=
=
=
ε
M
L
M
przypadek szczególny,
L
||
ω
ω
ω
ω
oraz
M
||
εεεε
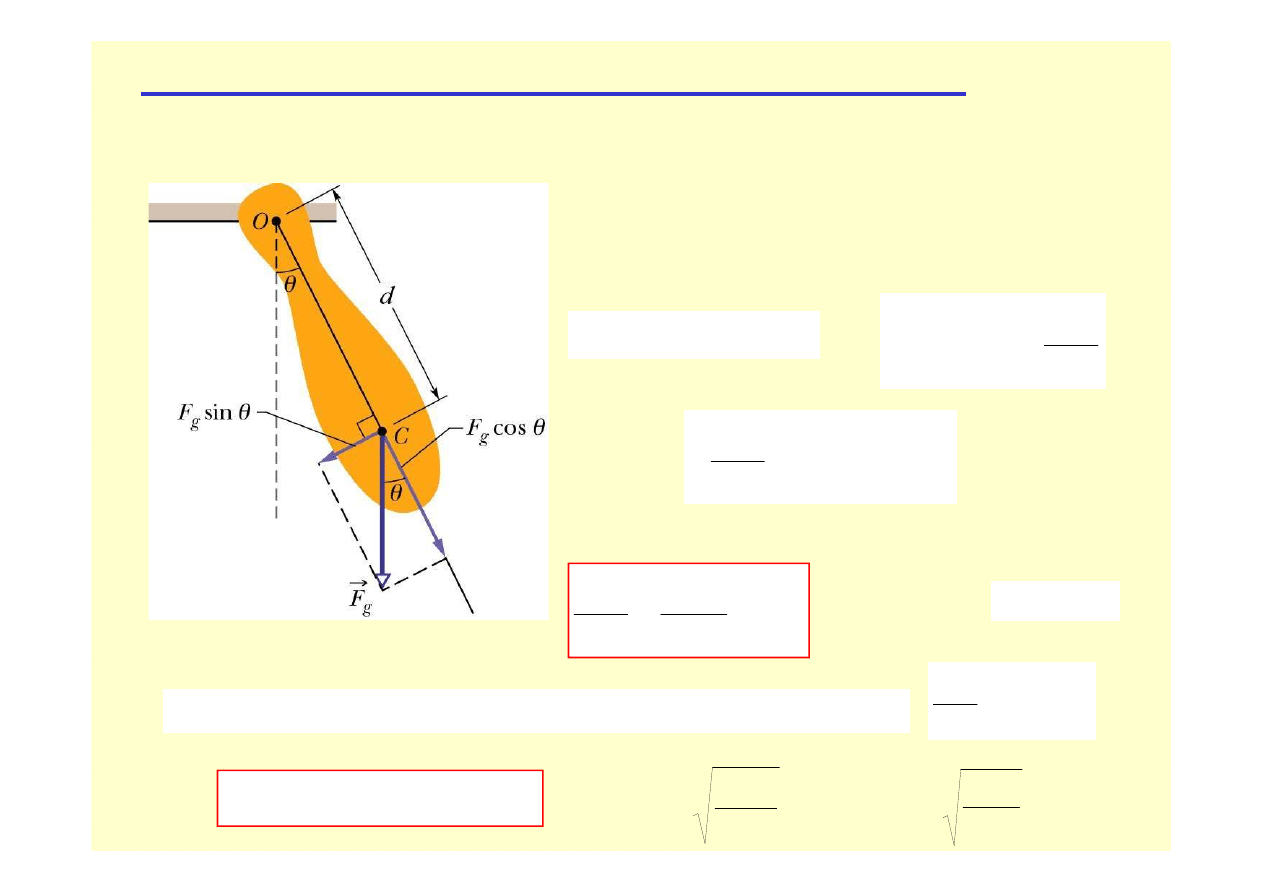
Przykład ruchu (1): Wahadło fizyczne
moment siły
powoduj
ą
cy
ruch:
2
2
d
d
t
I
I
M
θ
ε
=
=
θ
θ
sin
d
2
mgd
I
−
=
θ
sin
d
mg
M
−
=
II zasada dynamiki
Newtona dla bryły
sztywnej:
czyli:
PRZYKŁADY RUCHU BRYŁY SZTYWNEJ
θ
θ
sin
d
d
2
mgd
t
I
−
=
dla małych wychyle
ń
θ
:
0
d
d
2
2
=
+
θ
θ
I
mgd
t
poniewa
ż
:
θ
θ
≈
sin
rozwi
ą
zanie równania oscylatora drga
ń
harmonicznych:
)
cos(
)
(
0
0
ϕ
ω
θ
θ
+
=
t
t
I
mgd
=
0
ω
mgd
I
T
π
2
=
0
d
d
2
0
2
2
=
+
θ
ω
θ
t
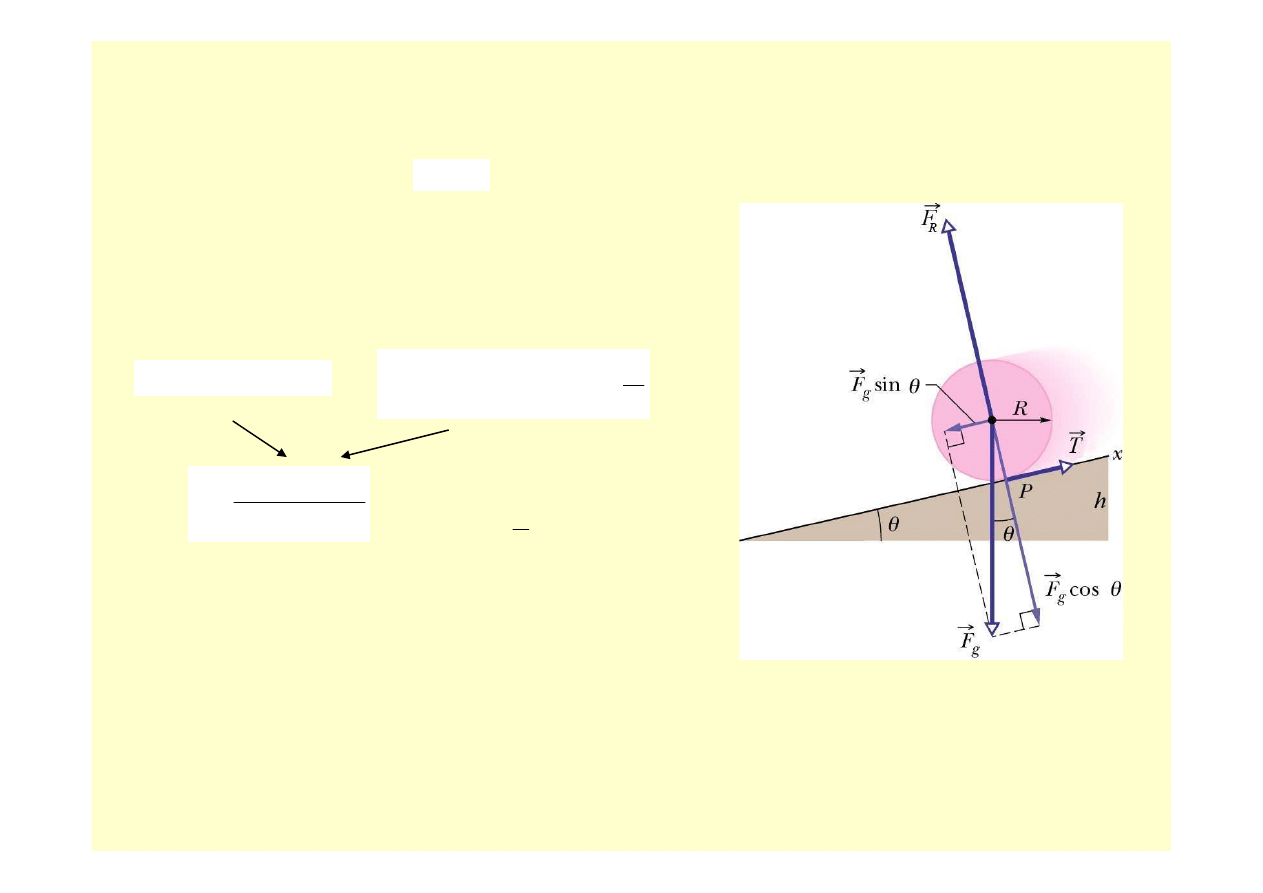
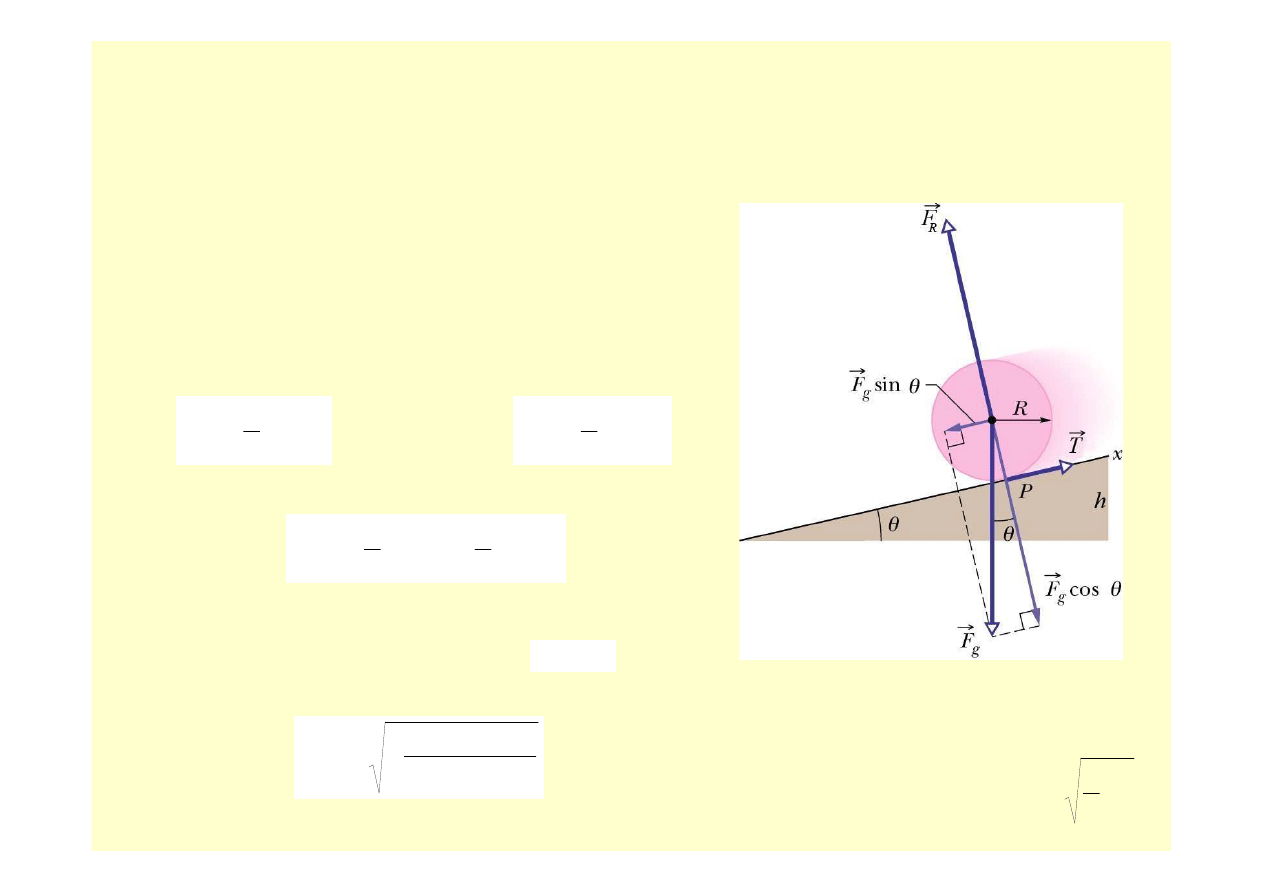
Przykład ruchu (2): Toczenie si
ę
(bez po
ś
lizgu) po równi pochyłej
– równania ruchu
Toczenie bez po
ś
lizgu:
R
a
ε
=
ma
T
mg
=
−
θ
sin
ruch post
ę
powy
ruch obrotowy
R
a
I
I
RT
M
SM
SM
=
=
=
ε
.
θ
sin
3
2
g
a
=
np. dla walca:
2
/
sin
R
I
m
mg
a
SM
+
=
θ
Przykład ruchu (3): Toczenie si
ę
(bez po
ś
lizgu) po równi pochyłej
– równania ruchu
ruch post
ę
powy
ruch obrotowy
2
2
1
SM
kp
m
E
v
=
2
2
1
ω
I
E
SM
ko
=
Z zasady zachowania energii
2
SM
kp
R
ω
=
v
2
SM
ko
2
2
2
1
2
1
ω
SM
SM
I
m
mgh
+
=
v
Toczenie bez po
ś
lizgu
np. dla walca
gh
SM
3
4
=
v
2
/
2
R
I
m
mgh
SM
SM
+
=
v
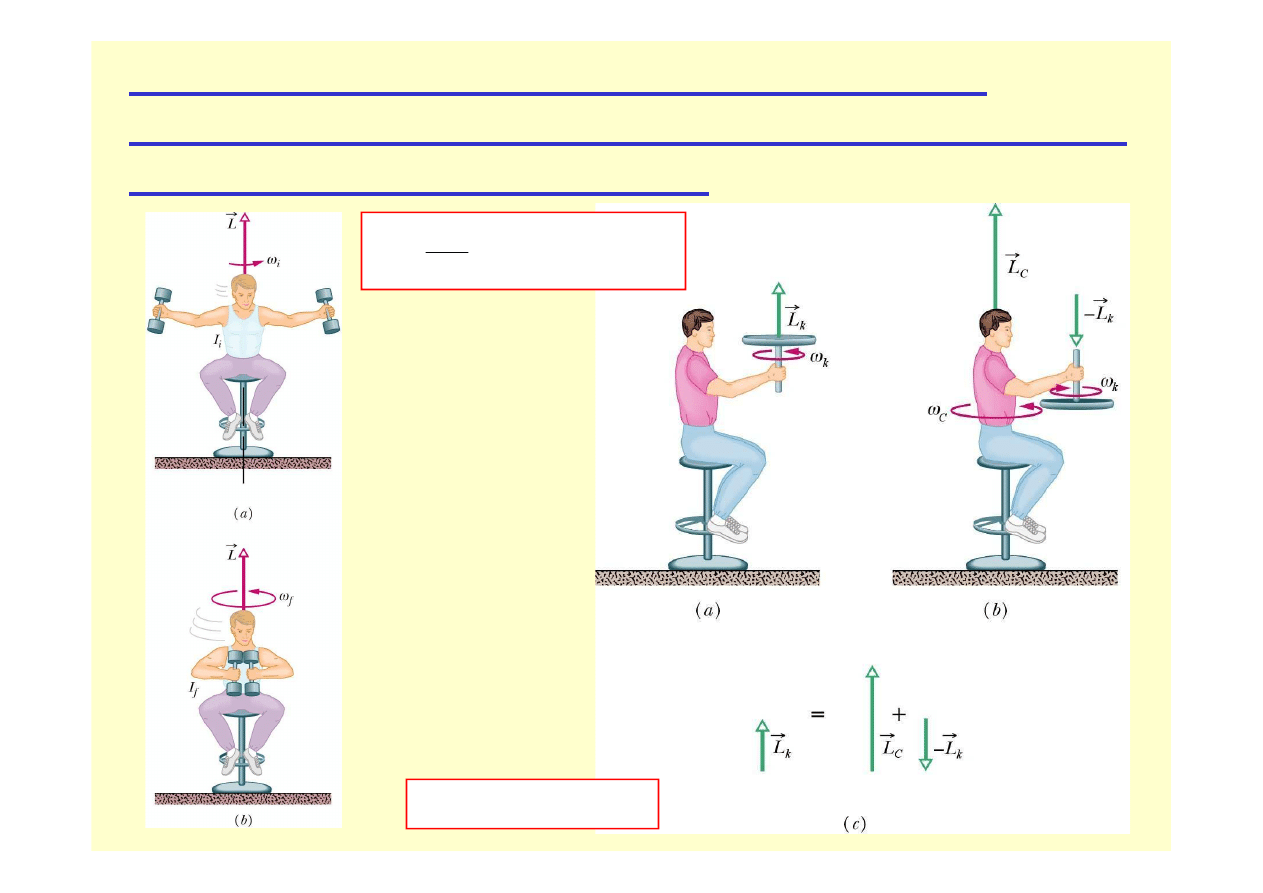
const.
0
d
d
=
⇒
=
=
L
L
M
t
KONSEKWENCJE ZASADY ZACHOWANIA
MOMENTU PĘDU I DRUGIEJ ZASADY DYNAMIKI
DLA RUCHU OBROTOWEGO
const.
=
=
ω
ωω
ω
Ι
L
Wyszukiwarka
Podobne podstrony:
6 IMIR przyklady bryla sztywna Nieznany (2)
IMIR przyklady praca energia id Nieznany
IMIR przyklady praca energia id Nieznany
F11 bryla sztywna id 167352 Nieznany
Bryla sztywna id 93304 Nieznany (2)
3 Przykladowy opis obrazu 2 id Nieznany (2)
5 dynamika ciala sztywnego id Nieznany (2)
Nowy folder Przyklady do w2 id Nieznany
am przyklady calki lista10 id 5 Nieznany (2)
04 Bryla sztywnaid 4984 Nieznany (2)
3 Przykladowy opis obrazu 2 id Nieznany (2)
IMIR prac energia przyklady id Nieznany
IMIR przyklady kinematyka id 21 Nieznany
IMIR prac energia przyklady id Nieznany
2 IMIR przyklady dynamikaid 203 Nieznany (2)
więcej podobnych podstron