Dynamika bryły sztywnej
ruch obrotowy punktu materialnego
definicja bryły sztywnej
dynamika bryły sztywnej
ruch obrotowy
ruch obrotowo
– postępowy
moment bezwładności
II zasada dynamiki dla ruchu obrotowego
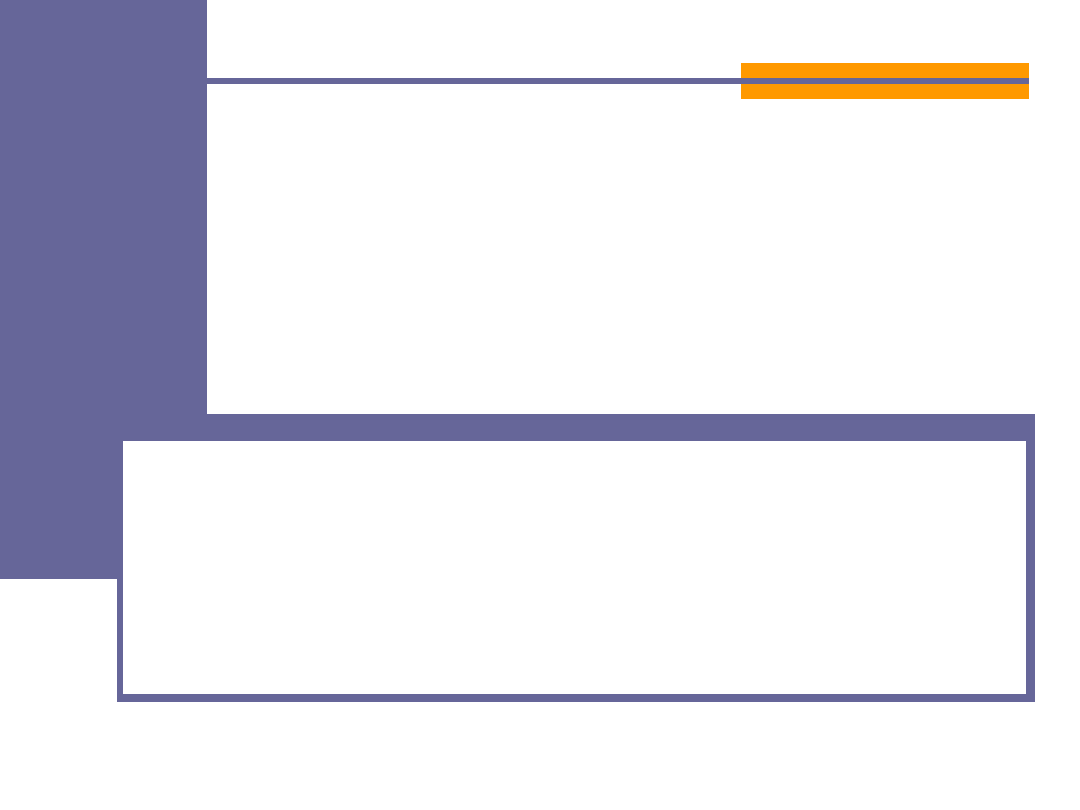
Ruch obrotowy punktu materialnego
ruch obrotowy po okręgu -
szczególny przypadek płaskiego
ruchu krzywoliniowego
droga kątowa
–
położenie punktu A określone za
pomocą kąta
j
r
s
j
droga liniowa
s
–
za pomocą drogi kątowej
j
:
prędkość kątowa:
r
dt
d
dt
ds
j
dt
d
j
prędkość liniowa punktu A:
r
v
kierunek wektora
dany jest przez
regułę śruby
prawoskrętnej
j
s
x
y
A
r
v
j
A
r
v
dt
d
dt
d
a
v
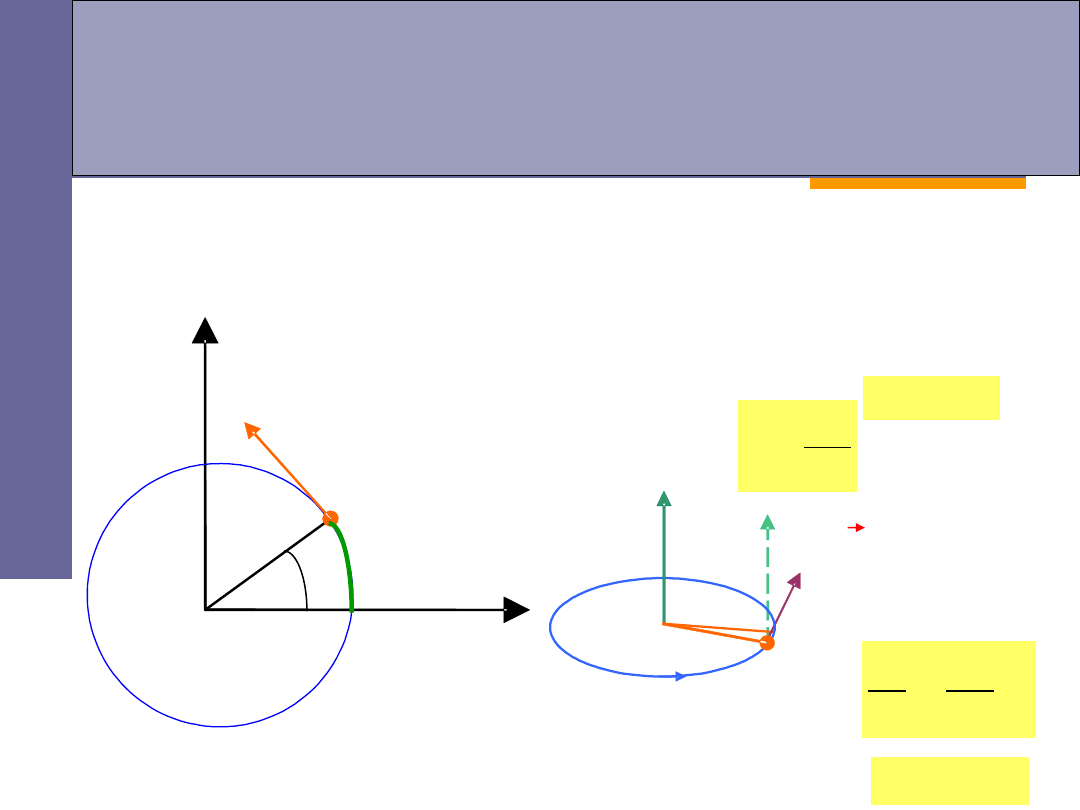
przyspieszenie kątowe:
przyspieszenie liniowe
styczne i dośrodkowe
:
)
(
r
dt
d
dt
r
d
r
dt
d
r
dt
d
a
s
r
dt
r
d
a
n
v
dt
d
a
s
v
|
|
r
a
n
2
v
|
|
Ruch obrotowy punktu materialnego
s
a
v
n
a
a
r
n
s
a
a
a
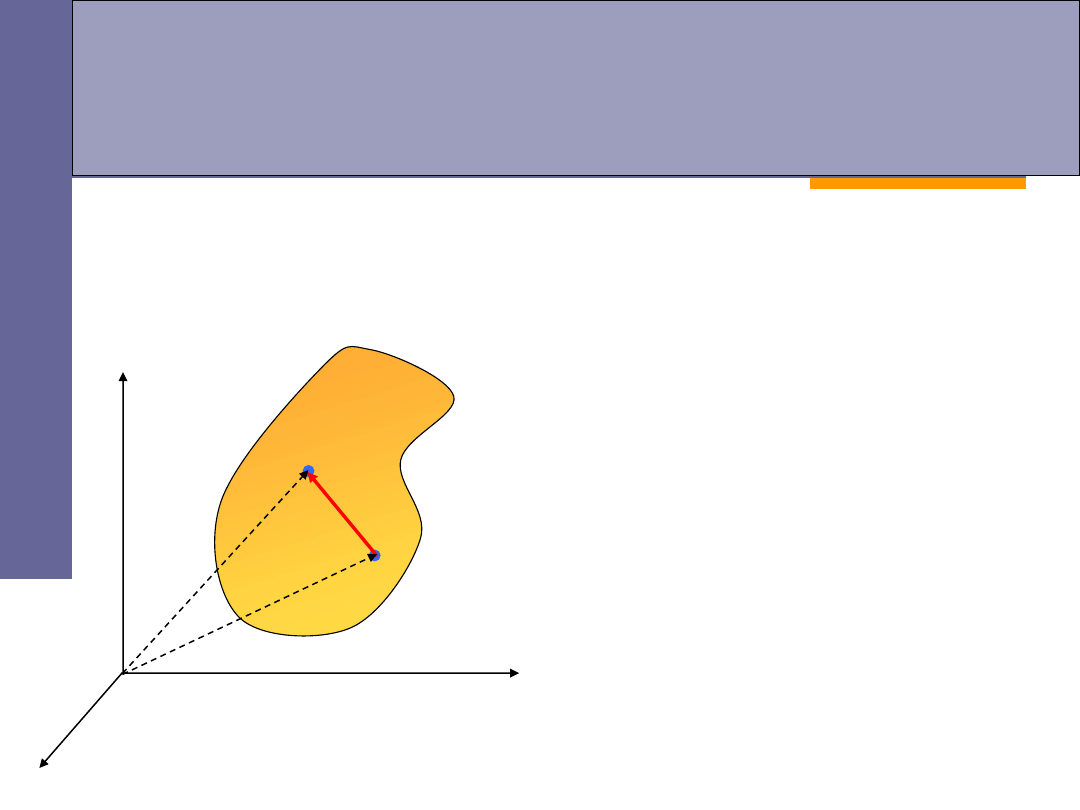
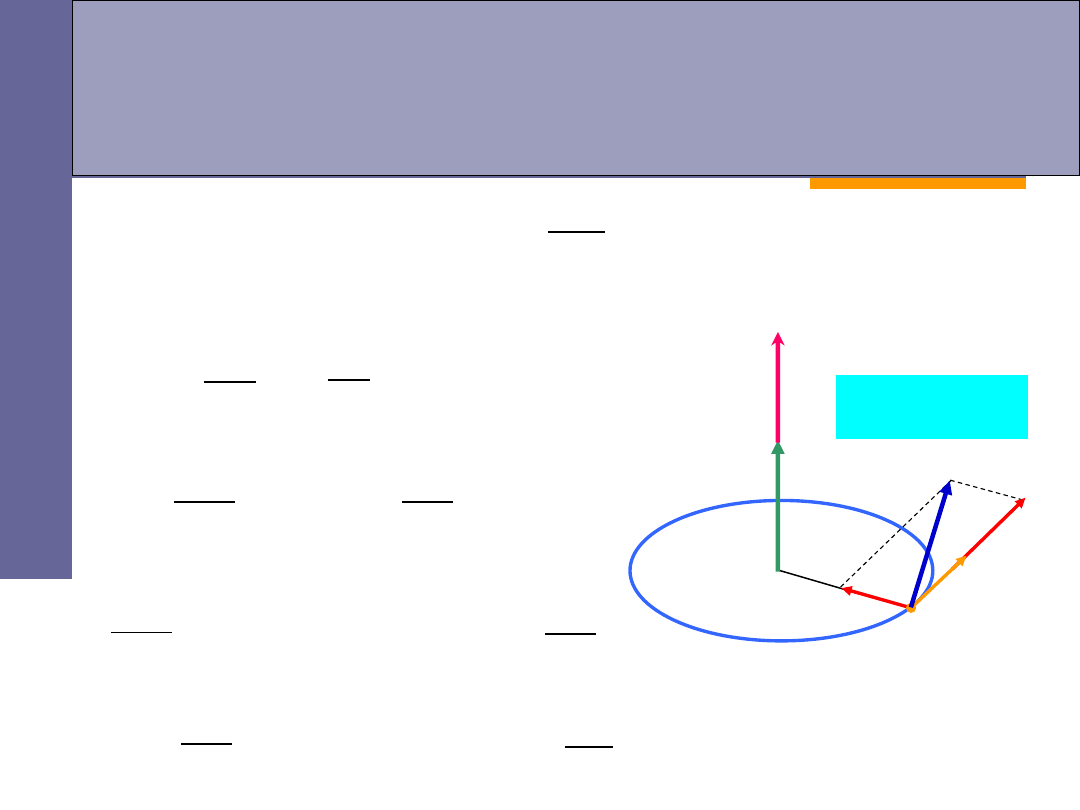
Dynamika bryły sztywnej
Bryłą sztywną
nazywamy ciało stałe, w którym odległość dwu
dowolnie wybranych punktów nie ulega zmianie, mimo działających
na to ciało sił.
x
z
y
m
1
m
2
i
r
ij
r
j
r
const
r
r
r
j
i
ij
|
|
|
|
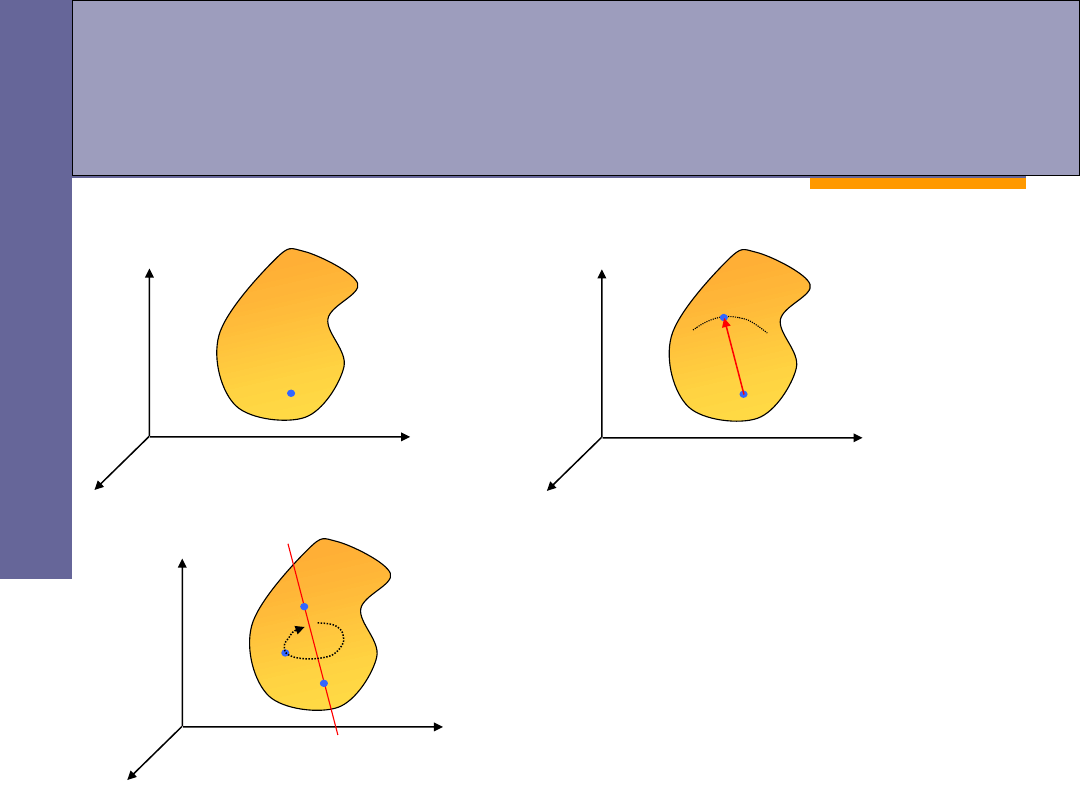
Rodzaje ruchów bryły sztywnej
stopnie swobody:
f = 3
x
z
y
m
1
x
z
y
m
1
m
2
r
f = 2
jeden punkt unieruchomiony
dwa punkty unieruchomione
x
z
y
m
1
m
2
m
3
f = 1
Bryła sztywna ma
sześć
stopni swobody!
f = 6
f = 3
f = 5
0
– środek
masy
x
z
y
0
Rodzaje ruchów bryły sztywnej
Stopnie swobody
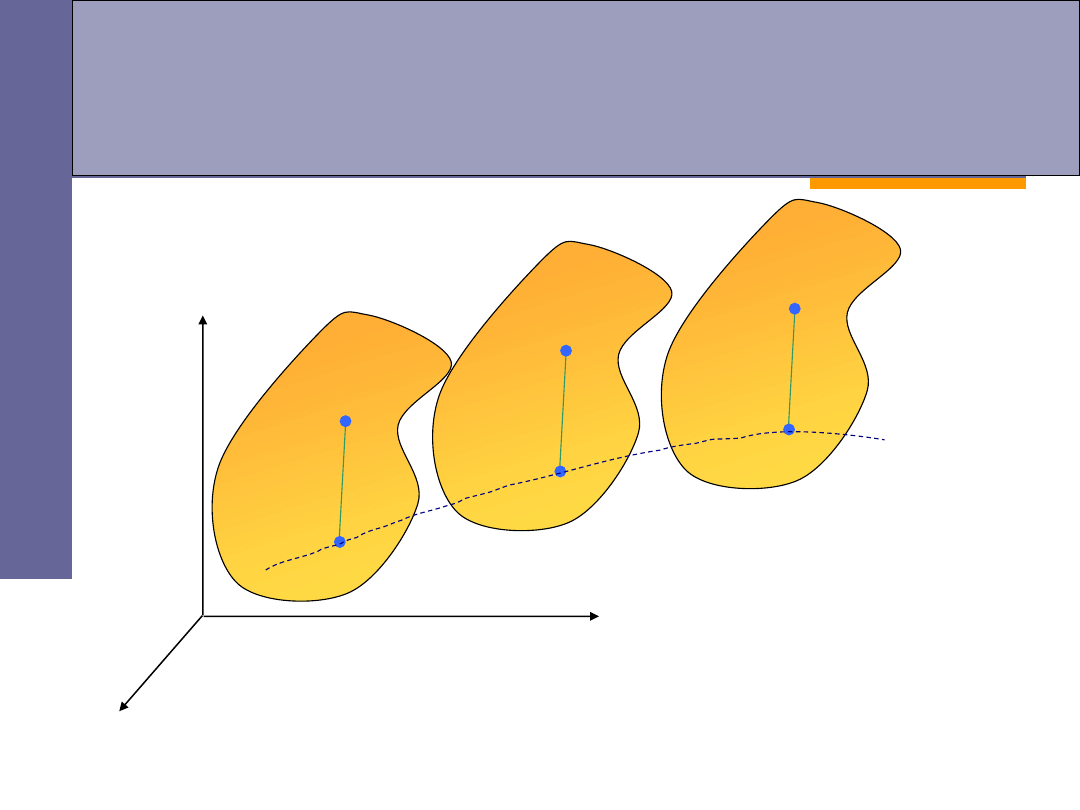
Rodzaje ruchów bryły sztywnej
ruch postępowy:
wektory prędkości i przyspieszenia są takie same dla
wszystkich punktów,
x
y
z
dowolny odcinek łączący dwa punkty zachowuje stałe
położenie do siebie równoległe
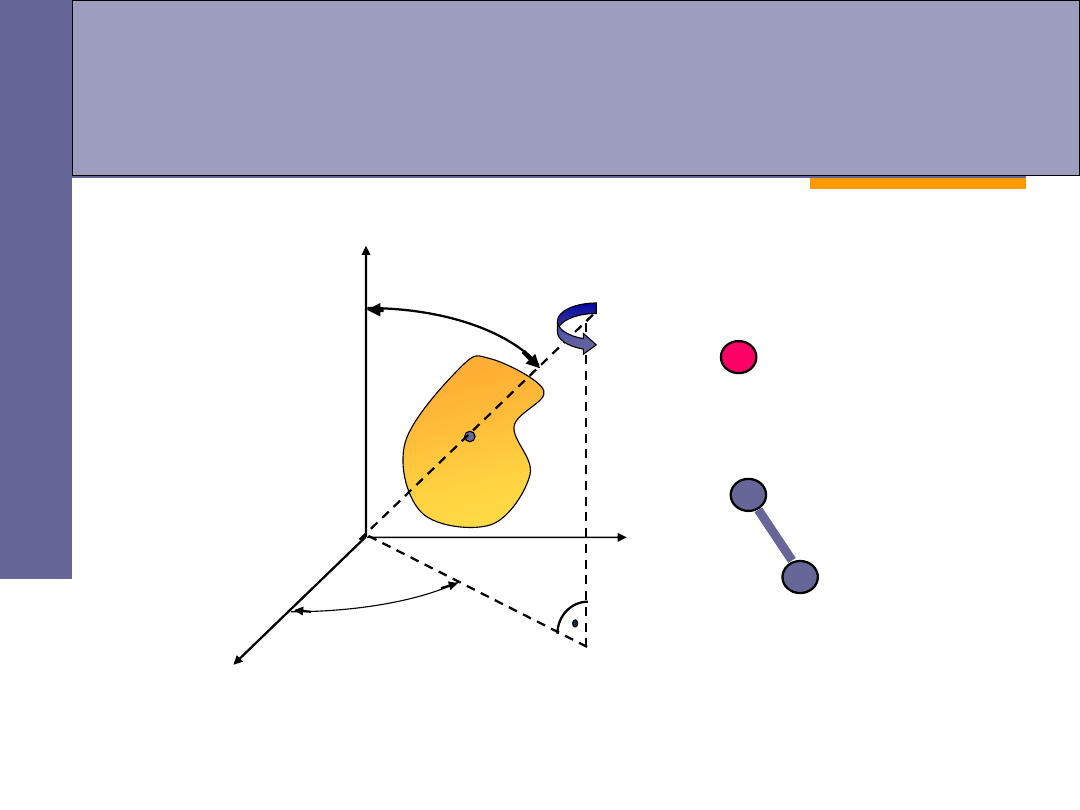
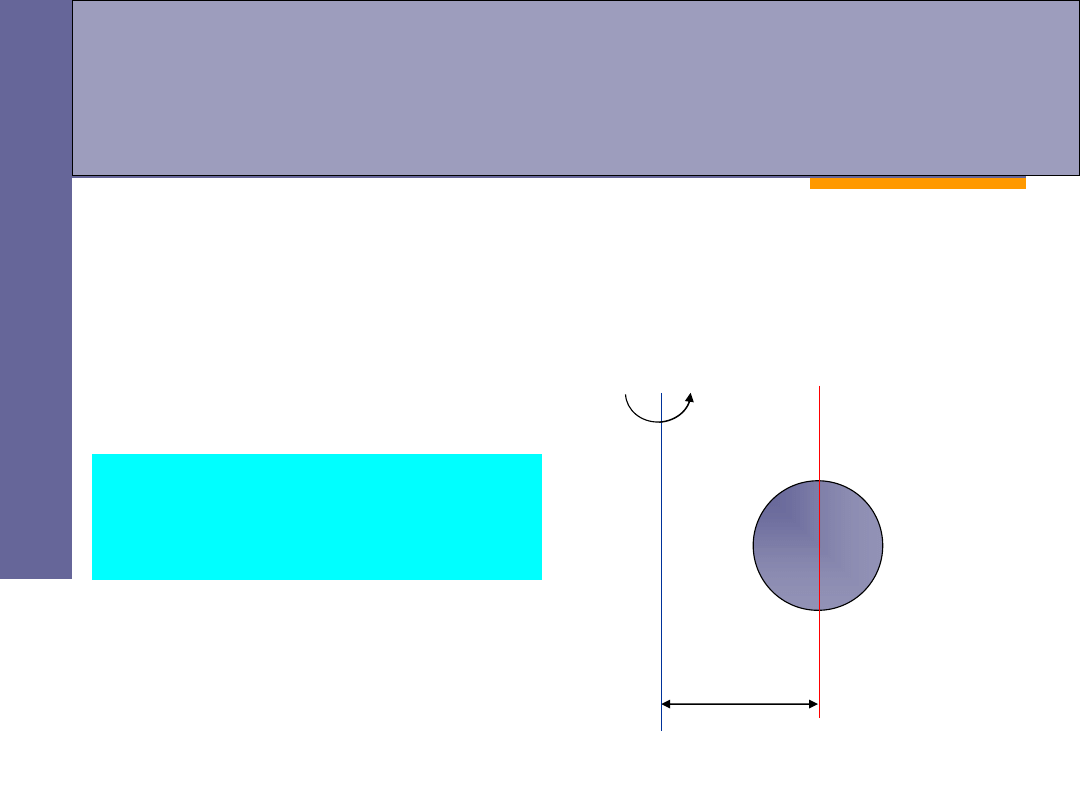
Rodzaje ruchów bryły sztywnej
ruch obrotowy:
wszystkie punkty poruszają się po okręgach, których
środki leżą na jednej prostej zwaną
osią obrotu
,
x
y
z
oś
poszczególne punkty bryły mają
tę samą prędkość kątową,
poszczególne punkty bryły mają
różne prędkości liniowe
,
zależne od odległości od osi obrotu.
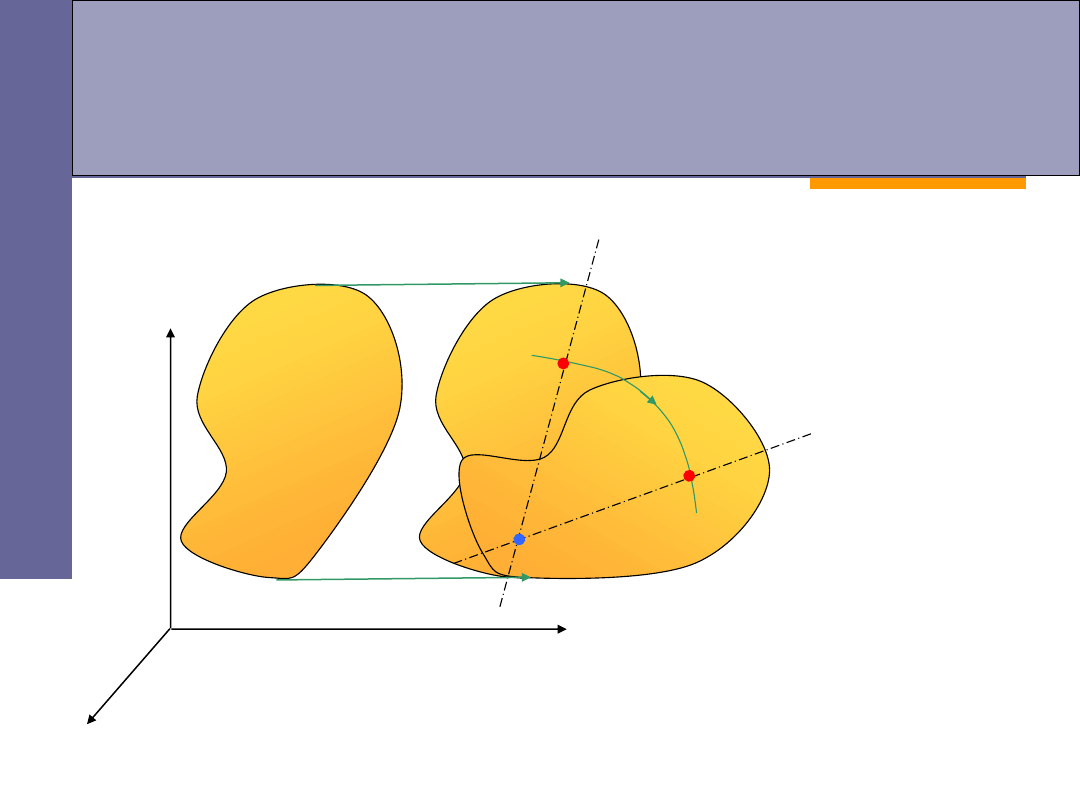
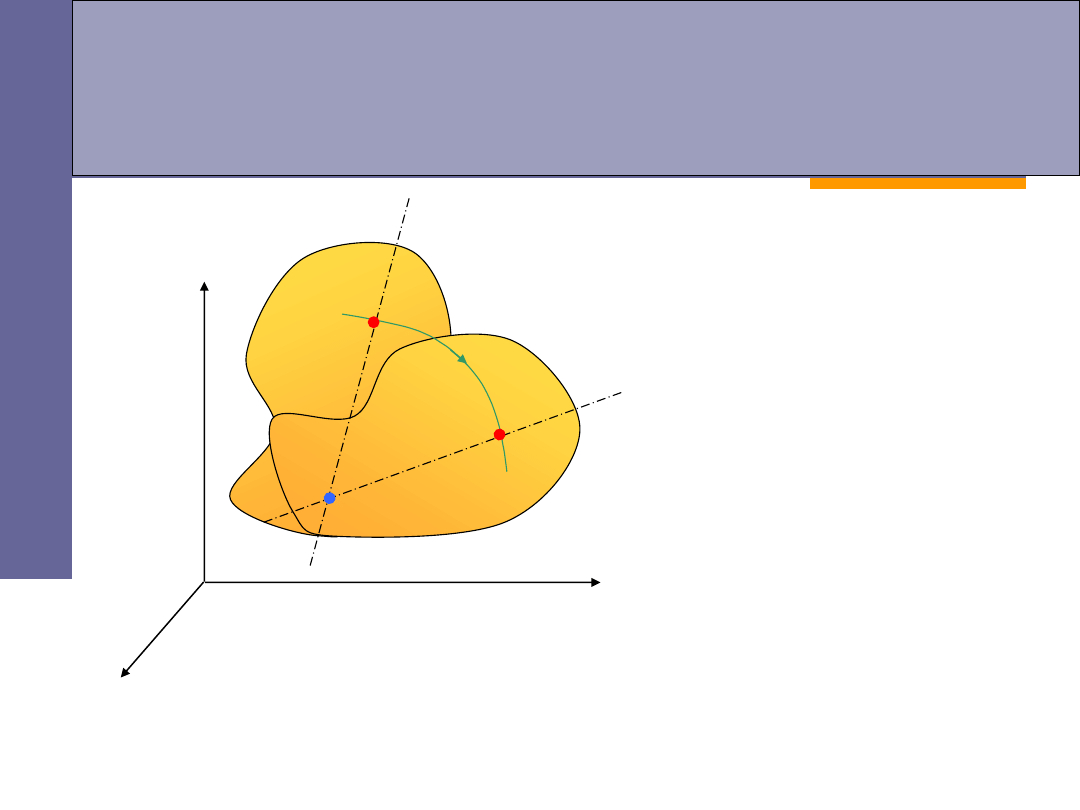
Rodzaje ruchów bryły sztywnej
ruch postępowo – obrotowy:
dowolny ruch ciała sztywnego można
złożyć
z ruchu
postępowego
i
obrotowego
x
y
z
oś
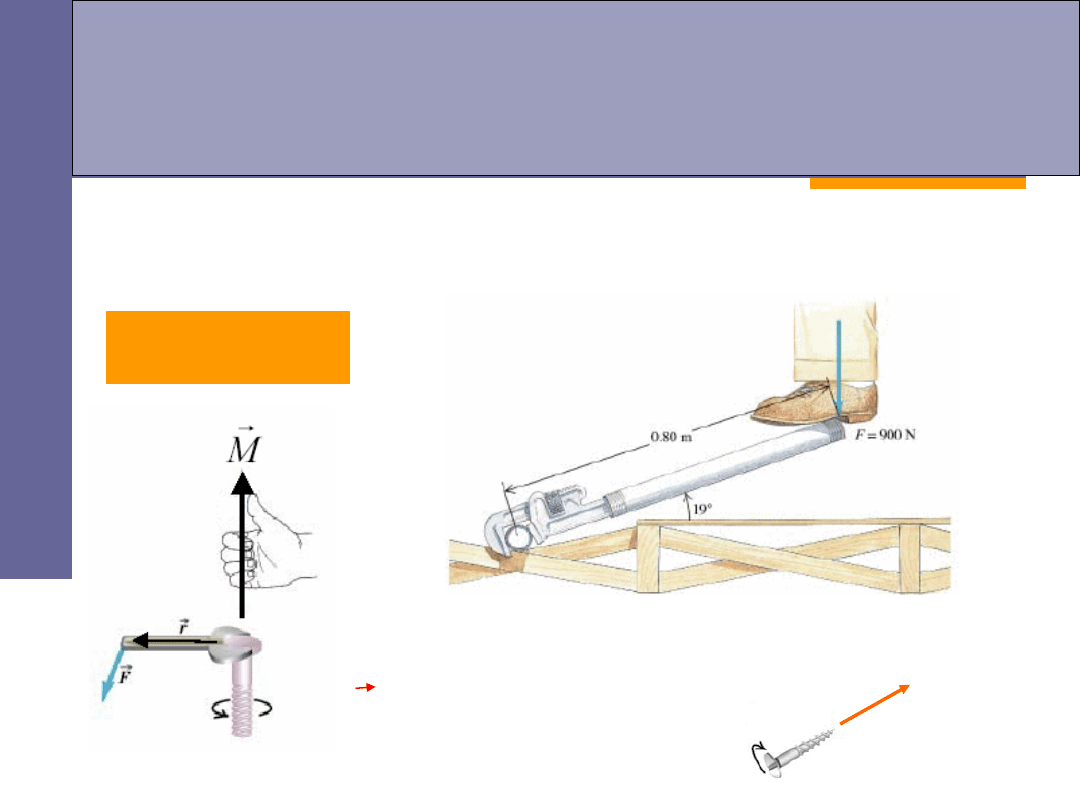
Moment siły
F
r
M
Wielkością fizyczną wywołującą obrót bryły sztywnej jest
moment
siły
(tzw.
moment obrotowy
):
Aby
spowodować ruch obrotowy bryły sztywnej niezbędna jest siła.
r
nazywamy ramieniem siły,
kierunek
momentu siły wyznaczamy z reguły śruby
prawoskrętnej,
M
gdy:
0
||
M
F
r
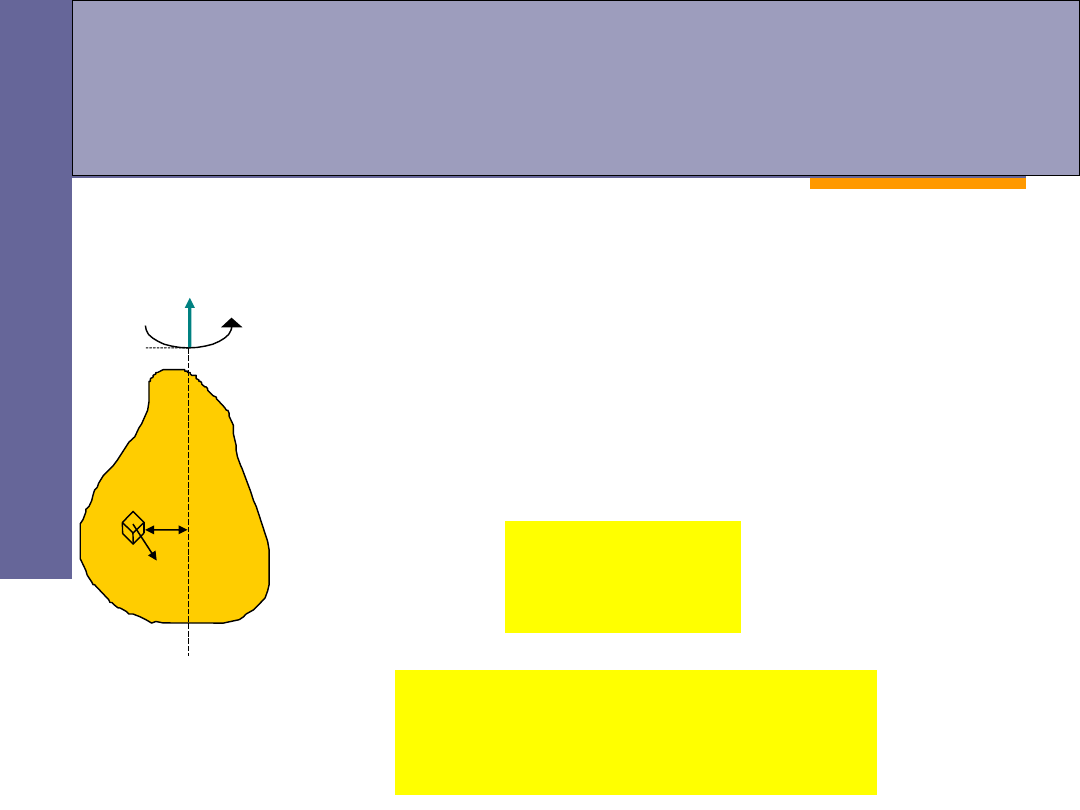
Moment bezwładności
podzielmy bryłę sztywną na zbiór
n
punktów materialnych
o masach
D
m
1
,
D
m
2
,….,
D
m
n
Przeanalizujmy
ruch obrotowy
bryły sztywnej wokół stałej osi ze stałą
prędkością kątową
odległości poszczególnych mas od osi obrotu wynoszą
r
1
, r
2
,…., r
n
momentem bezwładności
I
bryły sztywnej względem danej osi
nazywamy sumę iloczynów mas poszczególnych punktów bryły
sztywnej i kwadratów odległości od danej osi:
D
n
i
i
i
r
m
I
1
2
w przypadku bryły o ciągłym rozkładzie masy:
dm
r
r
m
I
n
i
M
i
i
n
D
1
2
2
lim
i
m
D
i
v
i
r
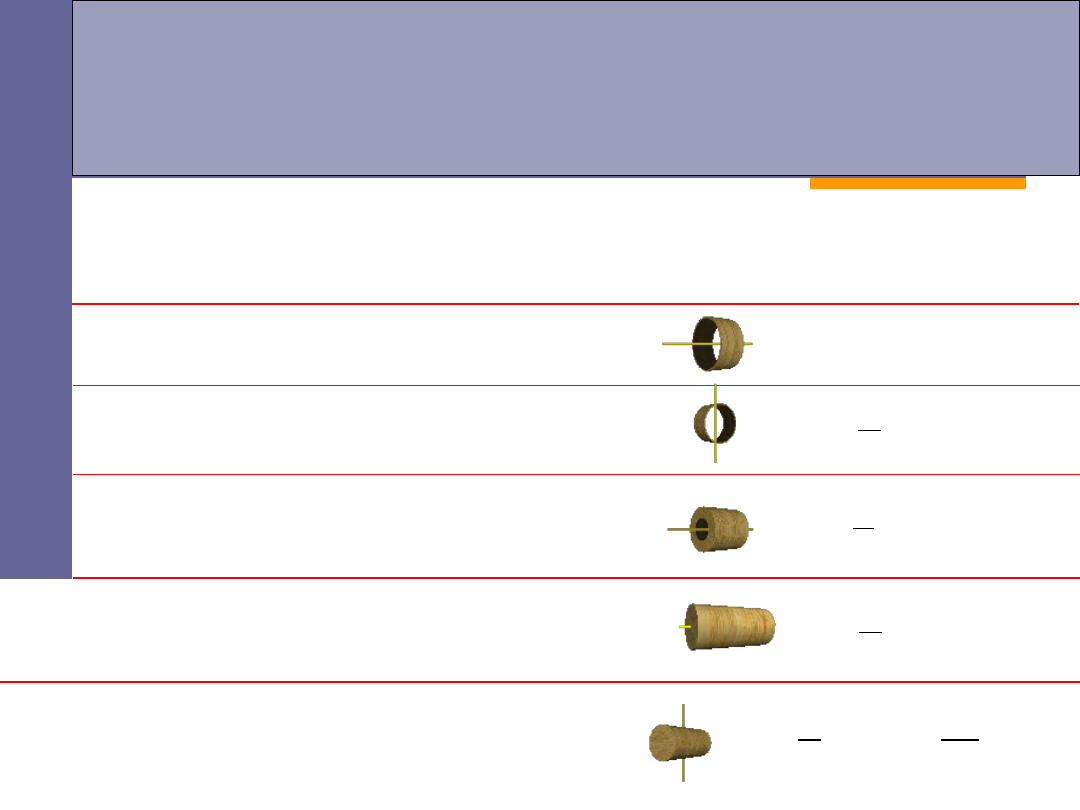
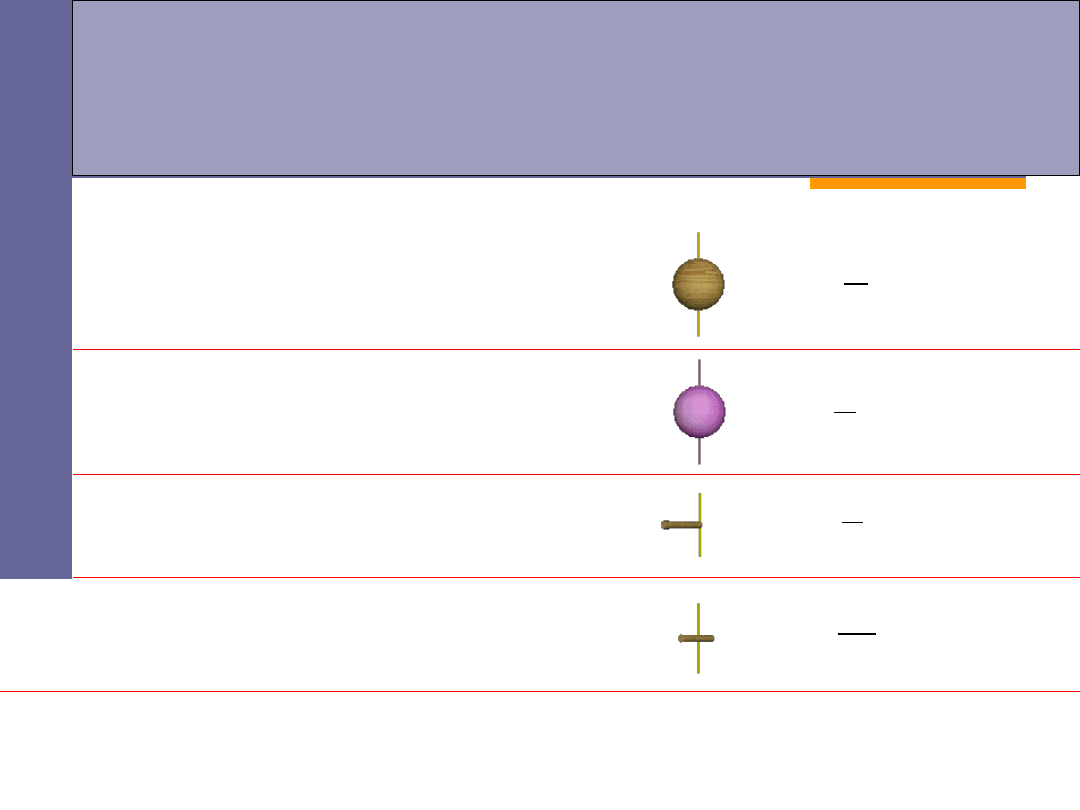
Moment bezwładności
-
przykłady
2
2
2
1
2
1
r
r
m
I
2
r
m
I
moment bezwładności
I
jest analogiczną wielkością do masy
m
w ruchu
postępowym. Chociaż masa ciała nie zależy od jego położenia to moment
bezwładności zależy od osi, wokół której obraca się ciało:
cienki pierścień o masie
m
i promieniu
r
obracający się wokół własnej osi:
pierścień o masie
m
i promieniach
r
1
i
r
2
obracający się wokół własnej osi:
walec o masie
m
, długości
L
i promieniu
r
obracający się wokół własnej osi:
2
2
1
r
m
I
cienki pierścień o masie
m
i promieniu
r
obracający się wokół osi prostopadłej:
2
2
1
r
m
I
walec o masie
m
, długości
L
i promieniu
r
obracający się wokół osi prostopadłej do
niego i przechodzącej przez środek:
2
2
12
1
4
1
L
m
r
m
I
Moment bezwładności
-
przykłady
2
3
2
r
m
I
2
12
1
L
m
I
2
5
2
r
m
I
kula o masie
m
i promieniu
r
obracająca się wokół własnej osi:
sfera o masie
m
i promieniu
r
obracająca się wokół własnej osi:
pręt o masie
m
i długości
L
obracający się wokół osi prostopadłej
do niego i przechodzącej przez jego koniec:
2
3
1
L
m
I
pręt o masie
m
i długości
L
obracający się wokół osi prostopadłej
do niego i przechodzącej przez jego środek:
jednostką momentu pędu jest
2
1
m
kg
Twierdzenie Steinera
0
I
m
2
a
m
I
I
o
Moment
bezwładności
I
bryły sztywnej względem dowolnej osi jest
równy sumie momentu bezwładności
I
o
względem osi równoległej
przechodzącej przez środek masy bryły oraz iloczynu masy tej bryły
i kwadratu
odległości
a
obu osi:
a
II zasada dynamiki ruchu obrotowego
P
rzyspieszenie kątowe bryły sztywnej jest
proporcjonalne do m
omenty siły wypadkowej
działającej na bryłę; współczynnikiem
proporcjonalności jest odwrotność momentu
bezwładności.
I
M
Ruch obrotowy
bryły sztywnej wokół
stałej osi
i
m
D
i
F
i
r
M
I
M
II zasada dynamiki ruchu obrotowego
–
moment pędu (kręt)
i
i
i
p
r
L
dla całej bryły :
D
n
i
i
i
m
r
L
1
i
v
podstawiając:
r
v
D
n
i
i
i
i
r
m
r
L
1
D
n
i
i
i
m
r
1
2
I
I
L
)
v
(
i
i
i
i
m
r
L
D
i
m
D
i
v
i
r
L
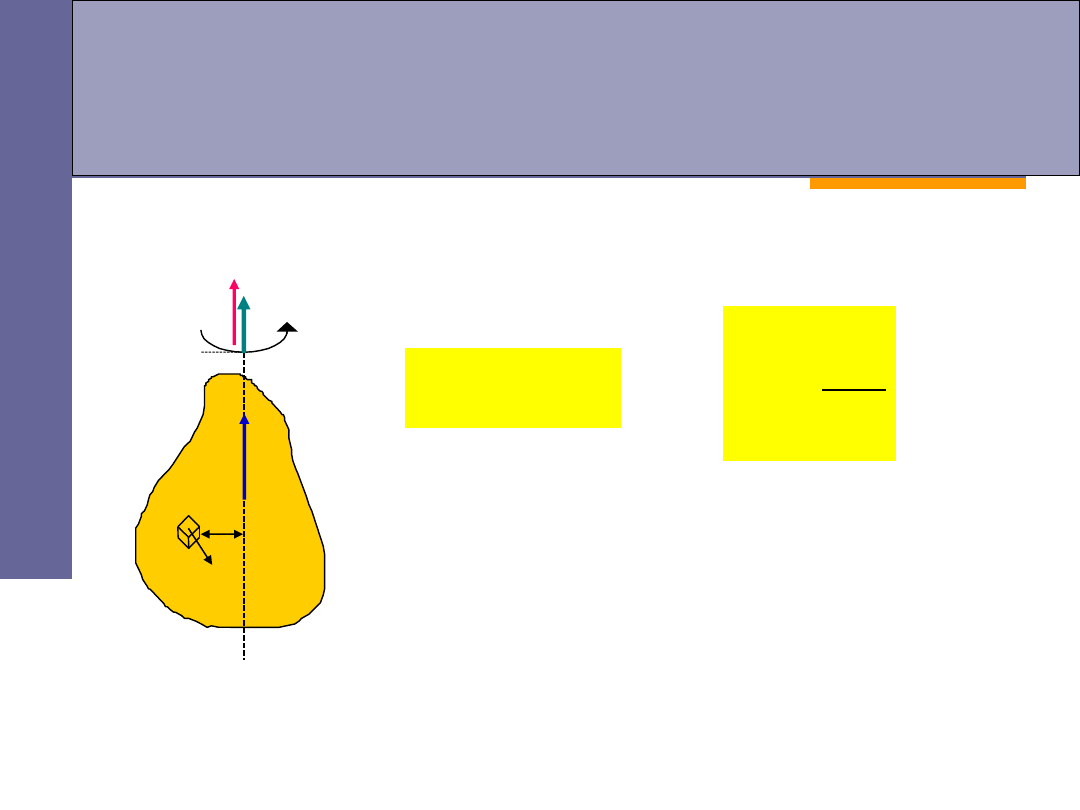
Moment pędu (kręt)
L
punktu
materialnego o masie
D
m
i
i wektorze wodzącym
r
i
, poruszającego się z prędkością
v
i
względem osi obrotu, definiujemy wzorem:
i
r
i
v
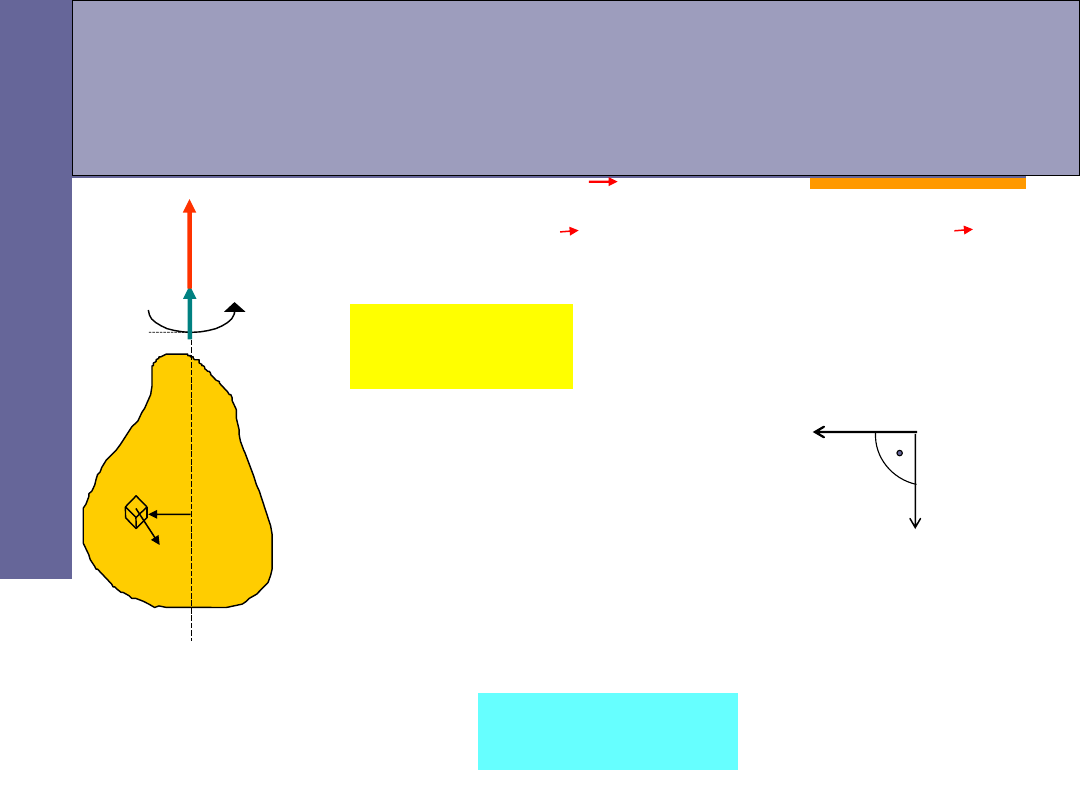
II zasada dynamiki ruchu obrotowego
– moment pędu (kręt)
Wypadkowy m
oment siły działający na bryłę sztywną
powoduje zmianę momentu pędu bryły. Pochodna momentu
pędu względem czasu jest równa momentowi siły.
II zasadę dynamiki możemy zapisać w postaci:
I
M
dt
d
I
dt
I
d
)
(
dt
L
d
M
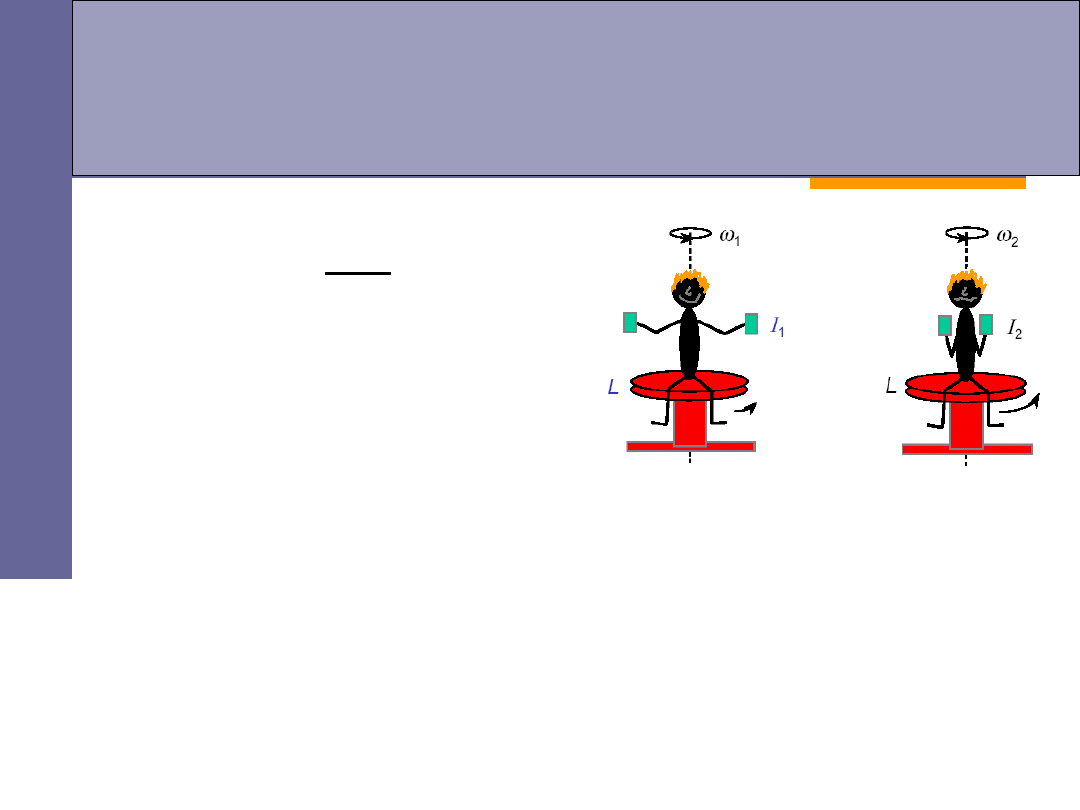
Zasada zachowania momentu
pędu (krętu)
0
M
const
L
Jeżeli moment wypadkowy sił
zewnętrznych działających
na bryłę równa się zeru,
to całkowity moment pędu
(kręt) pozostaje stały.
dt
L
d
M
moment sił zewnętrznych wynosi zero,
moment pędu jest zachowany,
2
2
1
1
I
I
ponieważ:
2
1
I
I
zatem:
1
2
zmniejszenie momentu bezwładności
przyspiesza obrót:
Energia kinetyczna ruchu
obrotowego
2
2
2
2
1
v
2
1
i
i
i
i
ki
r
m
m
E
n
i
i
i
r
m
1
2
2
2
1
Energię kinetyczną –
obliczamy sumując energie kinetyczne
poszczególnych punktów bryły:
dla całej bryły mamy zatem:
n
i
i
i
k
r
m
E
1
2
2
2
1
2
2
1
I
E
k
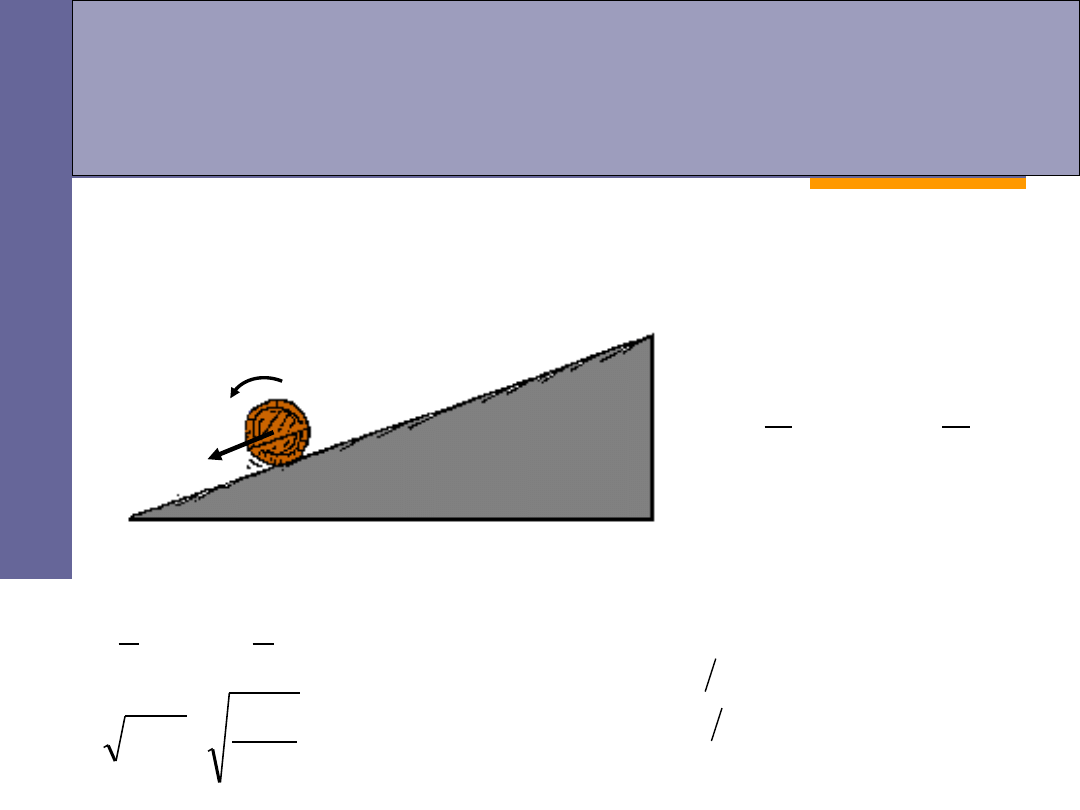
Energia kinetyczna ruchu
postępowo – obrotowego
v
m
1
1
2
v
c
gh
k
Energia kinetyczna
obracającej się bryły jest sumą energii kinetycznej
ruchu obrotowego i energii kinetycznej środka masy:
jeżeli wysokość równi wynosi
h
,
a promień ciała
r
, to obliczmy prędkość liniową
ciała u podstawy równi
v
k
:
2
2
2
1
v
2
1
I
m
E
k
2
2
2
1
v
2
1
k
k
I
m
mgh
2
v
r
m
c
I
r
kula
5
2
,
walec
2
1
ściance
cienkiej
o
rura
1
c
23:54
1
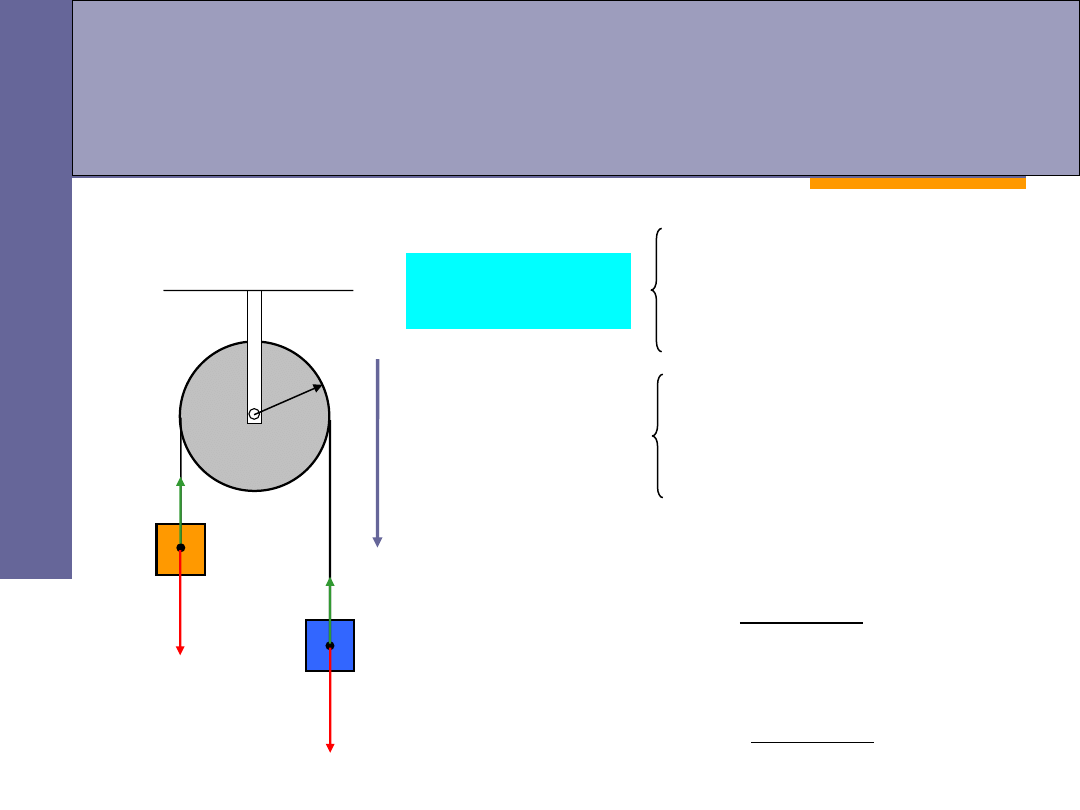
Przykłady – maszyna Atwooda
obliczmy przyspieszenie, z jakim poruszają się masy oraz naciąg nici:
g
m
Q
1
1
g
m
Q
2
2
2
N
bloczek nieruchomy:
m
1
m
2
m
r
1
N
a
g
m
m
a
m
m
)
(
)
(
1
2
2
1
g
m
m
m
m
a
2
1
1
2
g
m
m
m
m
N
2
1
2
1
2
g
m
N
a
m
1
1
1
2
2
2
N
g
m
a
m
N
g
m
a
m
2
2
g
m
N
a
m
1
1
Siły naciągu nici:
N
1
=N
2
=N
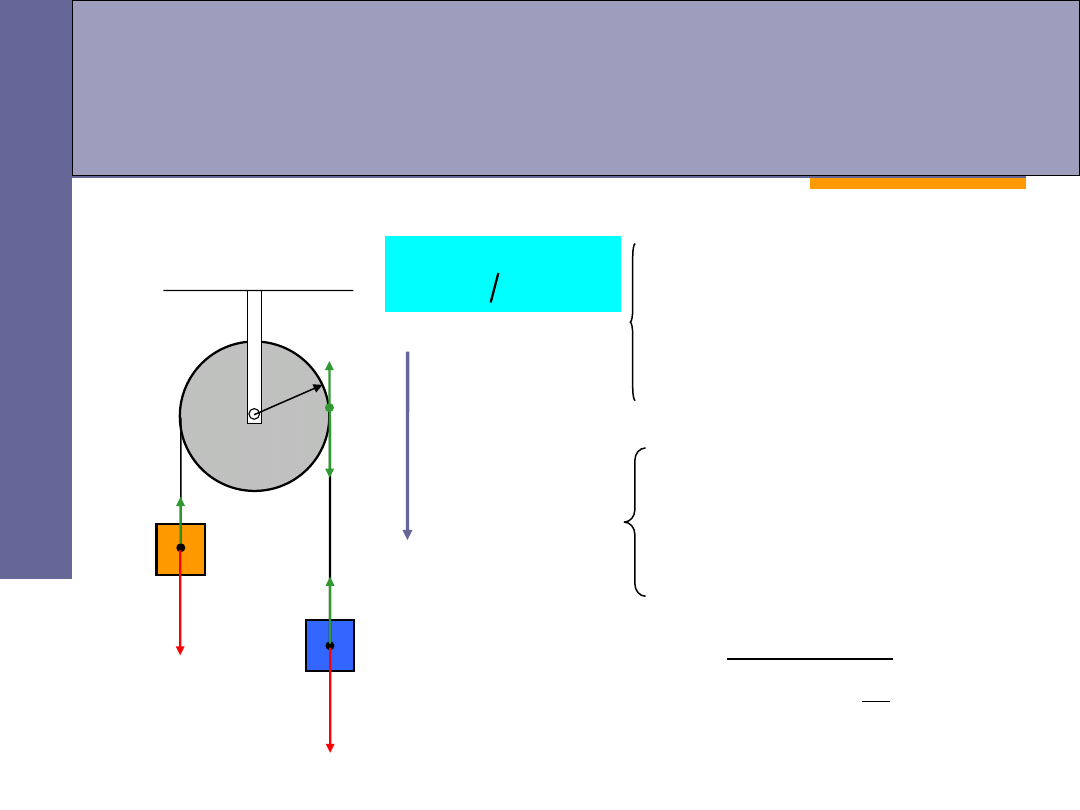
Przykłady – maszyna Atwooda
obliczmy przyspieszenie, z jakim poruszają się masy oraz naciąg nici:
g
m
1
g
m
2
2
N
bloczek ruchomy:
m
1
m
2
m
r
1
N
a
2
N
1
N
g
m
m
m
m
m
a
2
2
1
1
2
......
1
N
......
2
N
r
a
I
N
N
r
M
/
)
(
1
2
2
2
2
N
g
m
a
m
g
m
N
a
m
1
1
1
g
m
N
a
m
1
1
1
2
2
2
N
g
m
a
m
I
N
N
r
M
)
(
1
2
Siły naciągu nici:
N
1
=N
2
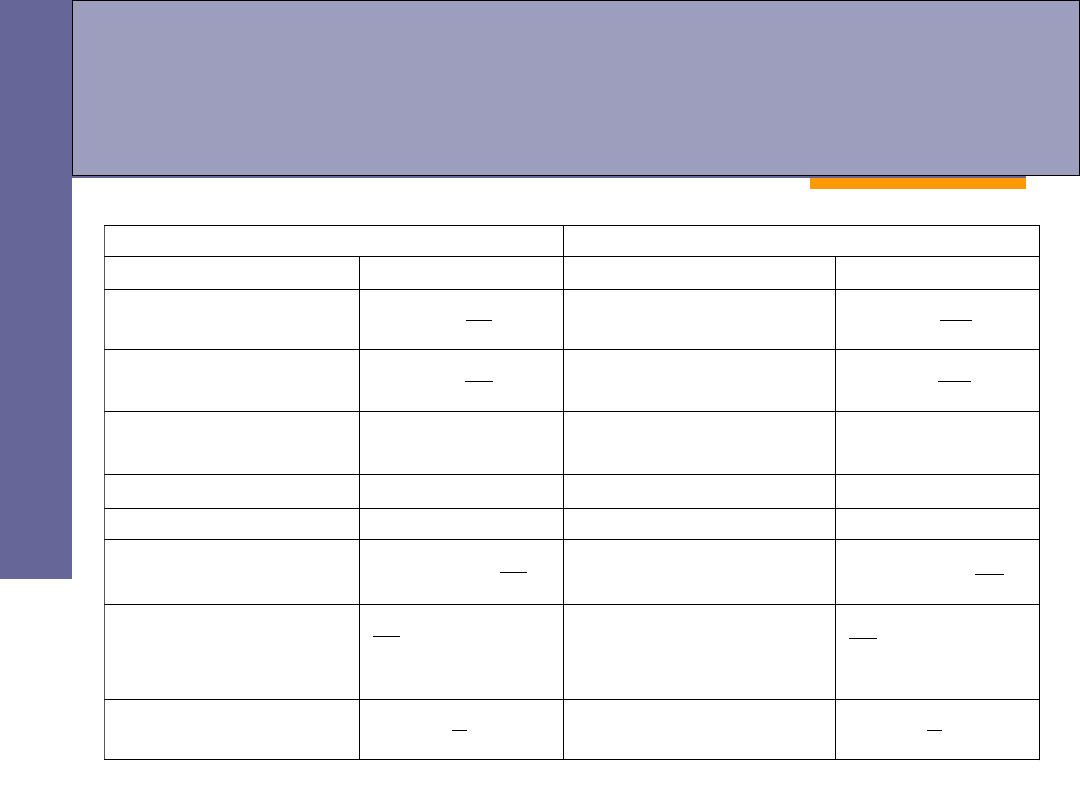
Analogia między ruchem
postępowym i obrotowym
Ruch prostoliniowy
Ruch obrotowy
Droga liniowa
s
Droga kątowa
j
Prędkość liniowa
dt
s
d
v
Prędkość kątowa
dt
d
j
Przyspieszenie
liniowe
dt
v
d
a
Przyspieszenie
kątowe
dt
d
Masa
m
Moment
bezwładności
I
Pęd
v
m
p
Moment pędu
I
L
Siła
F
Moment siły
M
II zasada dynamiki
dt
p
d
a
m
F
II zasada dynamiki
dt
L
d
I
M
Zasada
zachowania pędu
const
p
dt
p
d
0
Zasada zachowania
momentu pędu
const
L
dt
L
d
0
Energia kinetyczna
2
2
1
v
m
E
k
Energia kinetyczna
2
2
1
I
E
k
Wyszukiwarka
Podobne podstrony:
IMIR przyklady bryla sztywna id Nieznany
5 bryla sztywna [tryb zgodnosci Nieznany
F11 bryla sztywna id 167352 Nieznany
6 IMIR przyklady bryla sztywna Nieznany (2)
Bryla sztywna id 93304 Nieznany (2)
1 Bryła Sztywna Quizid 8461 ppt
2014 Matura 05 04 2014 odpid 28 Nieznany (2)
04 les sonsid 5067 Nieznany (2)
lfp1 bryla sztywna
04 Wykonywanie pomiarow paramet Nieznany
04 Wykonywanie izolacji termicz Nieznany (2)
ei 2005 04 s060 id 154155 Nieznany
Fizyka Uzupełniająca Bryła sztywna
311[51] 04 122 Arkusz egzaminac Nieznany (2)
04 Scinanie techniczneid 5186 Nieznany
04 Klasyfikowanie materialow bu Nieznany
7 04 2011 2 id 44696 Nieznany (2)
więcej podobnych podstron