PODSTAWY TELEDETEKCJI-ćwiczenia rachunkowe
Temat 2.Metody pomiaru odległości i prędkości radialnej.
Zadanie 1.
Na jakiej odległości znajduje się obiekt, gdy czas opóźnienia sygnałów wynosi:1μs, 1ms,
1min
Odp.150m, 150km,
km.
9
10
9
⋅
Zadanie 2.
W impulsowym radarze o okresie powtarzania T
p
równym 500us, odebrano sygnał echa
którego czas opóźnienia t
R
wynosi 1.8ms. Jaką odległość pomierzy radar?.
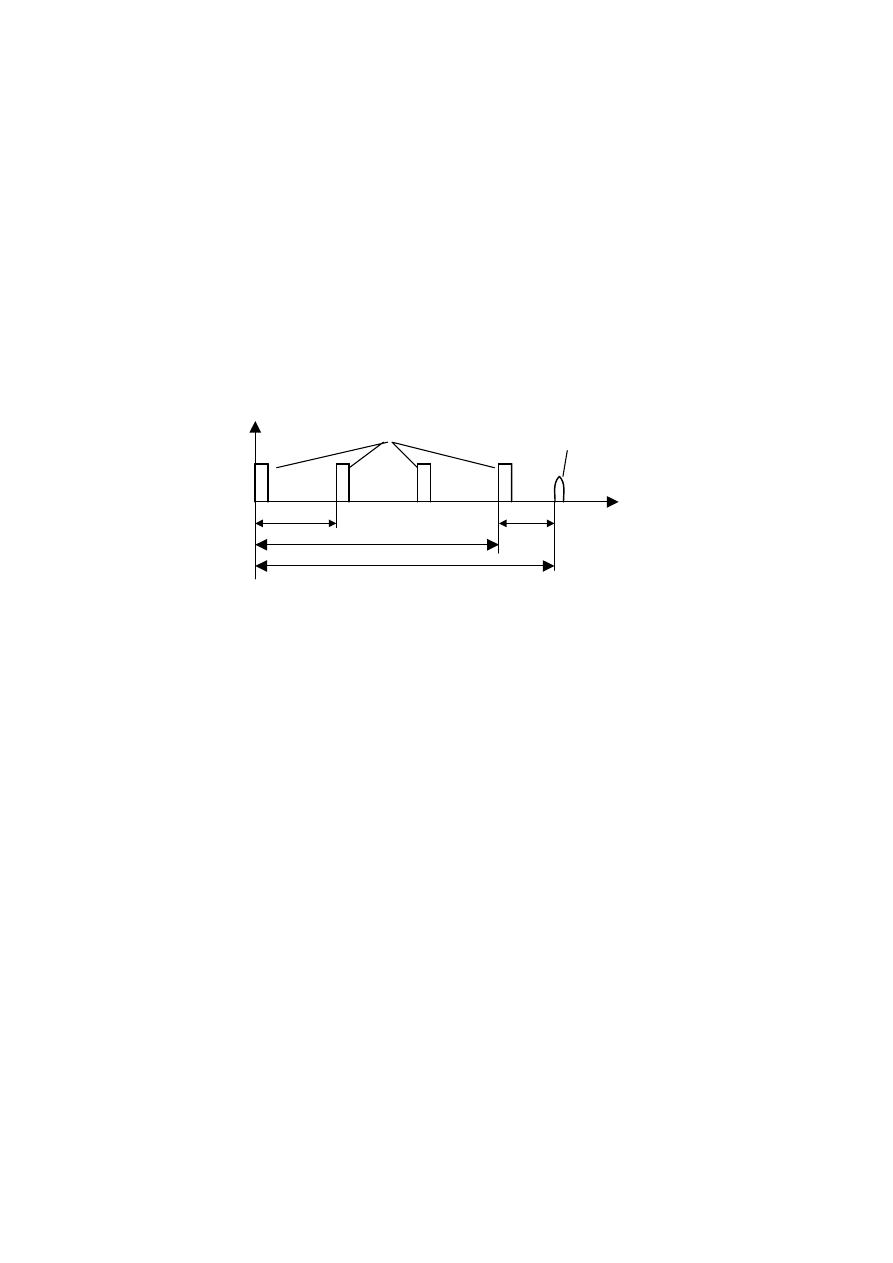
Opis zadania.
T
p
s(t)
t
Obwiednia impulsów
sondujących
impuls echa
t
r.mierz
p
nT
t
R
Ilustracja niejednoznaczności pomiaru odległości
W przypadku gdy czas opóźnienia odbitych sygnałów t
R
jest mniejszy od okresu powtarzania
radaru T
p
, wówczas pomiar dokonywany radarem jest pomiarem prawidłowym.
Jeżeli
, wówczas pomierzona odległość wynosi:
p
R
T
t
>
gdzie n –jest liczbą naturalną spełniającą warunek:
p
R
mierz
R
nT
t
t
−
=
.
R
p
t
nT
<
.
Odp. 45km
Zadanie 3.
Samolot znajduje się na odległości 75km. Jaką odległość zaobserwujemy na ekranie
wskaźnika jeżeli okres powtarzania T
p
= 0,3ms.
Odp. 30km.
Zadanie 4.
Radar brzegowy w porcie posiada maksymalny zasięg
km
R
18
max
=
. Obliczyć liczbę odbitych
impulsów od okrętu znajdującego się na maksymalnym zasięgu, gdy czas opromieniowania
okrętu wynosi
.
ms
t
opr
2
.
1
=
Odp. 10 impulsów.
Zadanie 5.
Średnia odległość Księżyca od Ziemi wynosi R=385 000km. Określić maksymalną wartość
częstotliwości powtarzania radaru impulsowego F
p.max
. zapewniającą jednoznaczny pomiar
odległości.
Odp. F
p.max
=0,39Hz.
1

Zadanie 6.
Samolotowy radar posiada moc impulsową 10
=
i
P
kW. Radar pracuje z dwiema
częstotliwościami potarzania
kHz i
10
1
=
p
F
30
2
=
p
F
kHz. Obliczyć czasy trwania impulsów
τ
1
i τ
2
odpowiednio dla
i
, jeżeli przy obu częstotliwościach powtarzania wymagana
jest identyczna moc średnia
W. Obliczyć energię każdego impulsu.
1
p
F
2
p
F
1500
=
śr
P
Zależności podstawowe:
Moc średnia radaru impulsowego
p
i
śr
T
P
P
τ
=
gdzie
p
T
τ
współczynnik wypełnienia
Energia impulsu
τ
i
P
E
=
Ponieważ moc średnia dla obu częstotliwości powtarzania ma być identyczna, więc przy stałej
mocy impulsowej równe muszą być współczynniki wypełnienia.
Odp.
15
1
=
τ
μs,
5
2
=
τ
μs,
J,
15
.
0
1
E
05
.
0
2
=
E
J.
Zadanie 7.
Zakres jednoznacznie mierzonej odległości radaru impulsowego
km. Pasmo
odbiornika radaru
100
=
jedn
R
5
.
0
=
B
MHz. Wyznaczyć: częstotliwość powtarzania impulsów F
p
, okres
powtarzania T
p
, rozróżnialność w odległości ΔR oraz czas trwania impulsu τ.
Zależności podstawowe:
2
p
jedn
cT
R
=
B
c
R
2
=
Δ
τ
1
=
B
Odp.
ms,
Hz,
66
.
0
=
p
T
1500
=
p
F
300
=
ΔR
m, τ = 2μs.
Zadanie 8.
Jak blisko od radaru mogą występować przedmioty terenowe, których wysokość „h” nie
przewyższa 10m. Radar powinien wykrywać samoloty pod minimalnym kątem wzniesienia
ε = 1
0
. Wysokość zawieszenia anteny h
a
= 2m.
Odp. R
min
= 458,4m
Zadanie 9.
Radar impulsowy pracujący na fali
10
=
λ
cm i czasie trwania impulsu
s
μ
τ
20
=
realizuje
obserwację sputników Ziemi. Czy jest on w stanie wykryć obiekt poruszający się z prędkością
radialną
km/s. Pasmo odbiornika jest dopasowane do pasma sygnału.
8
=
r
v
Zależności podstawowe:
Przesunięcie częstotliwości spowodowane ruchem obiektu
λ
ν
r
D
F
2
=
pasmo odbiornika
τ
1
=
B
Odp. Nie wykryje ponieważ częstotliwość odebranych sygnałów wyjdzie poza pasmo
przepuszczania odbiornika.
2
Zadanie 10.
Radar z symetryczną piłową modulacją częstotliwości posiada następujące parametry:
częstotliwość modulacji
100
/
1
=
=
M
M
T
F
Hz, dewiacja częstotliwości
Hz.
Odległość do celu wynosi 300km. Obliczyć częstotliwość sygnału różnicowego F
5
10
=
Δf
r
.
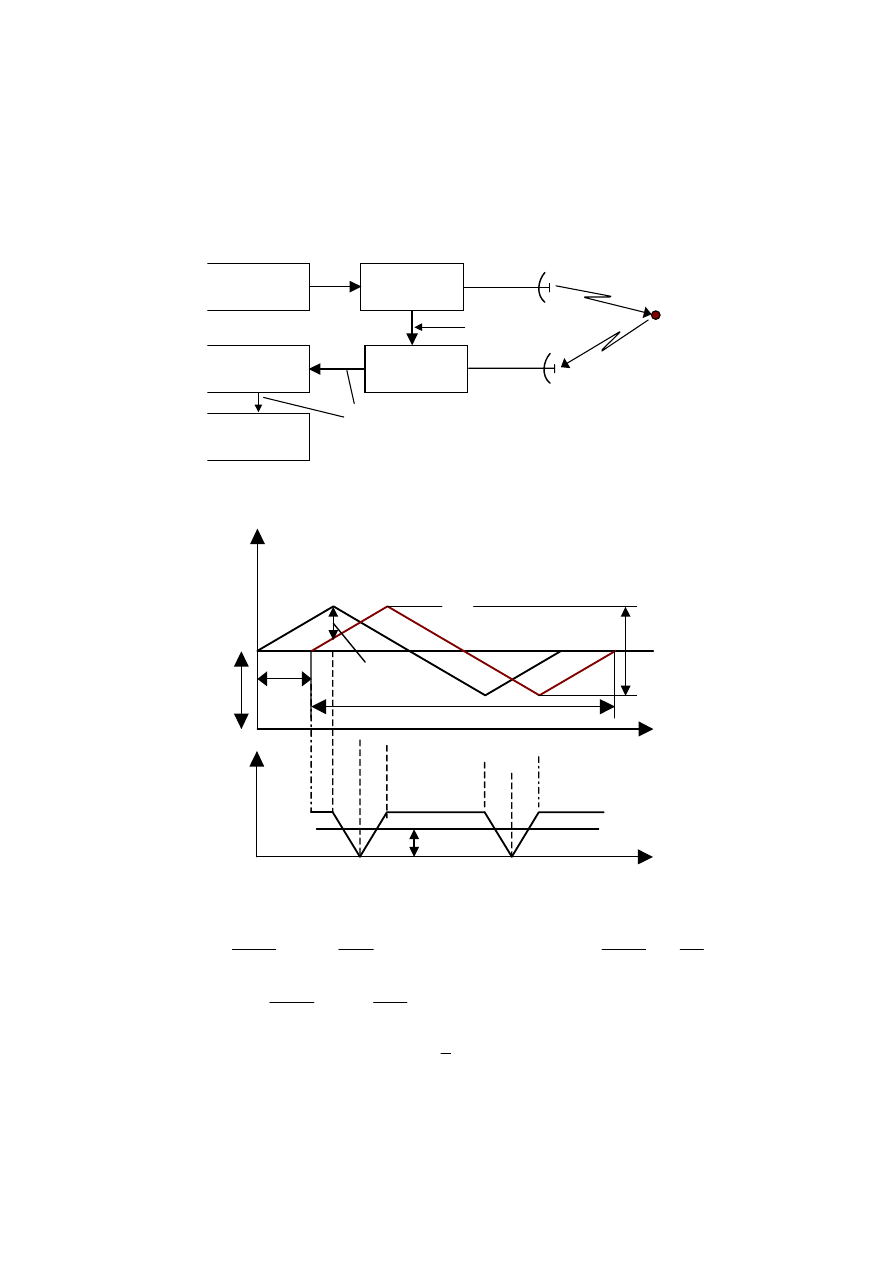
Podstawowe wiadomości teoretyczne dotyczące częstotliwościowej metody pomiaru
odległości.
Modulator
Gen. bwcz
Detektor
Wzm.i ogr.
Miernik F
r
f
1
f
2
odniesienie
F
r
obiekt
Schemat blokowy radaru FMCW
(fala ciągła z modulacją częstotliwości)
f
t
f
1
f
2
f
M
F
r
f
0
R
t
t
F
r
F
r.śr
T
M
Δ
f
M
Przebiegi ilustrujące pracę radaru FMCW
t
T
f
f
t
T
f
f
f
M
M
M
M
4
4
/
0
0
1
+
=
+
=
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
c
R
t
T
f
f
f
M
M
2
4
/
0
2
⇒
=
=
−
M
M
r
cT
R
f
F
f
f
8
2
1
r
M
m
F
f
cT
R
8
=
gdy
.
jedn
R
Δ
M
r
f
F
=
stąd
M
jedn
cT
R
8
1
.
=
Δ
Odp.40kHz.
3
Zadanie 11.
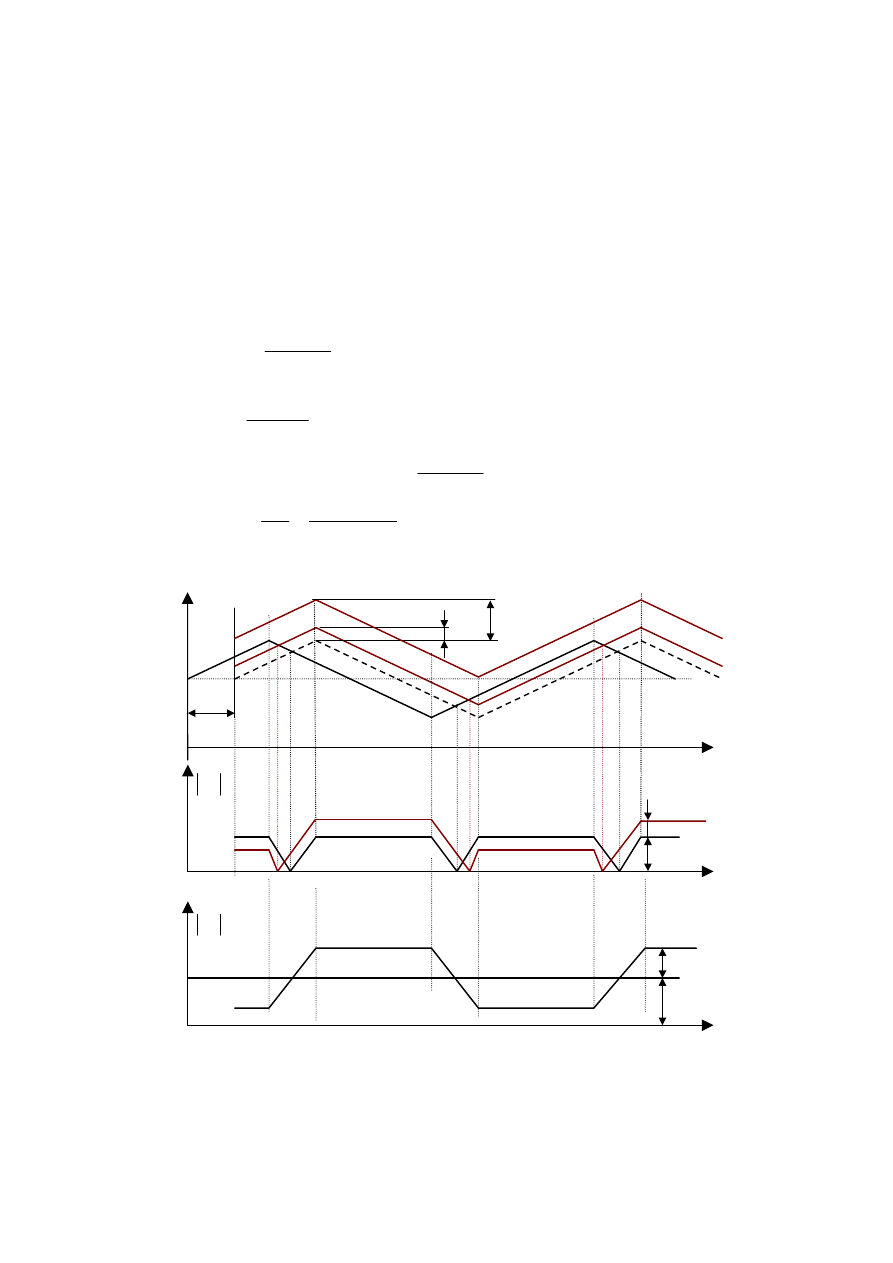
W jaki sposób efekt Dopplera (ruch obiektu) wpłynie na pracę radaru z symetryczną piłową
modulacją częstotliwości.
Posługując się poniższym rys. można przeanalizować wpływ ruchu obiektu na pracę radaru
FMCW. Przy założeniu że f
d
< F
r
i warunku, że cel zbliża się do radaru możemy
zaobserwować, że w jednym półokresie modulacji T
M
częstotliwość Dopplera f
d
odejmuje się
od częstotliwości różnicowej (dudnień) F
r
, a w drugim dodaje(rys.1b).
d
r
r
f
F
F
+
=
1
d
r
r
f
F
F
−
=
2
Wartość średnia częstotliwości dudnień
r
r
r
śr
r
F
F
F
F
=
+
=
2
2
1
.
F
rśr
wykorzystuje się do pomiaru odległości
M
śr
r
M
f
F
cT
R
8
.
=
d
r
r
f
F
F
2
2
1
=
−
2
2
1
r
r
d
F
F
f
−
=
Biorąc
(
)
4
2
2
1
r
r
d
rad
F
F
f
v
−
=
=
λ
λ
Tak więc mierząc
i
możemy pomierzyć prędkość radialną i odległość do obiektu.
1
r
F
2
r
F
t
R
f
d
f
t
f
n
f
0
a)
b)
f
Δ
F
r
F
r2
F
r1
t
f
Δ
t
F
r
f
d
c)
f
d1
F
r
f
d
Wpływ ruchu obiektu na pracę radaru FMCW
a) Częstotliwościowo-czasowe wykresy dla modulacji piłozębowej,
b) Wpływ efektu Dopplera przy założeniu, że
r
d
F
f
<
,
c) Wpływ efektu Dopplera przy założeniu, że
r
d
F
f
>
1
4

Zadanie 12.
Wysokościomierz pokładowy pracujący z falą ciągłą modulowaną w częstotliwości posiada
dwa zakresy robocze: 0-120m oraz 0-1200m. Przyjmując, że wartość częstotliwości
różnicowej jest jednakowa dla maksymalnych wysokości na obu zakresach a częstotliwość
modulacji nie zmienia się przy zmianie zakresu określić dewiację drugiego zakresu jeśli dla
pierwszego wynosi ona 40MHz.
Odp. 40MHz.
5
Wyszukiwarka
Podobne podstrony:
Opis metody pomiaru rezystancja skrośna i pow
Czas metody pomiaru dawniej i dziś
Metody pomiaru charakterystyk przepływu ciepła
3 Metody pomiaru wybranych właściwości reologicznych płynów
A3 Metrologia metody pomiarowe
77 Pomiar odległości ogniskowych soczewek cienkich
Metody pomiaru parametrów źródeł v2
1 Sprawozdanie$ 10 2014 Oscyloskopowe metody pomiaru częstotliwości i przesunięcia?zowego
Elektronika gotowe Różne metody pomiaru częstości drgań elektrycznych szczegó
Ćwiczenie 3 (Wstęp) Metody Pomiaru Rezystancji i Impedancji
Metody pomiaru trwałości warstwy granicznej olejów i smarów’’
Metody pomiaru predkosci
Wyznaczanie ogniskowych soczewek na podstawie pomiarów odległości przedmiotu v6 (2)
metody+pomiaru+w b3asno 9cci+cieplnych+ OTCQPYVK6X5X2BGZW4MVHTHGSRTET6ILEEIREIY
METODY POMIARU REZYSTANCJI1, OPOLE 13-10-1994r.
Statystyczne metody pomiarów
METODY POMIARU SKŁADU CIAŁA
więcej podobnych podstron