2013-06-04
1
Pojęcia podstawowe
Sygnałem nazywamy w automatyce dowolną wielkość fizyczną, będącą
funkcją czasu, wykorzystywaną do przekazywania informacji. Informacja
zawarta jest w
wartości lub kształcie przebiegu sygnału.
Elementem automatyki nazywamy dowolny
podzespół, zespół, przyrząd
lub
urządzenie, występujące w układach automatyki, w którym wyróżnić
można grupę sygnałów wejściowych i grupę sygnałów wyjściowych.
Obiekt sterowania obejmuje
różnorodne zbiory elementów automatyki,
tworzących określoną całość oraz procesy przebiegające w tych zbiorach.
Urządzenie sterujące to ogólnie rozumiany cały zespół środków, za pomocą
których realizuje się sterowanie.
Układem sterowania nazywamy zespół złożony z obiektu sterowania i
urządzenia sterującego, odpowiednio, funkcjonalnie powiązanych ze sobą.
Pojęcia podstawowe
Sterowanie w układzie otwartym
Wielkość
sterowana
y(t)
Sygnał
zadający
w(t)
Urządzenie
sterujące
Obiekt
sterowania
Sygnał
sterujący
u(t)
Zakłócenie z(t)
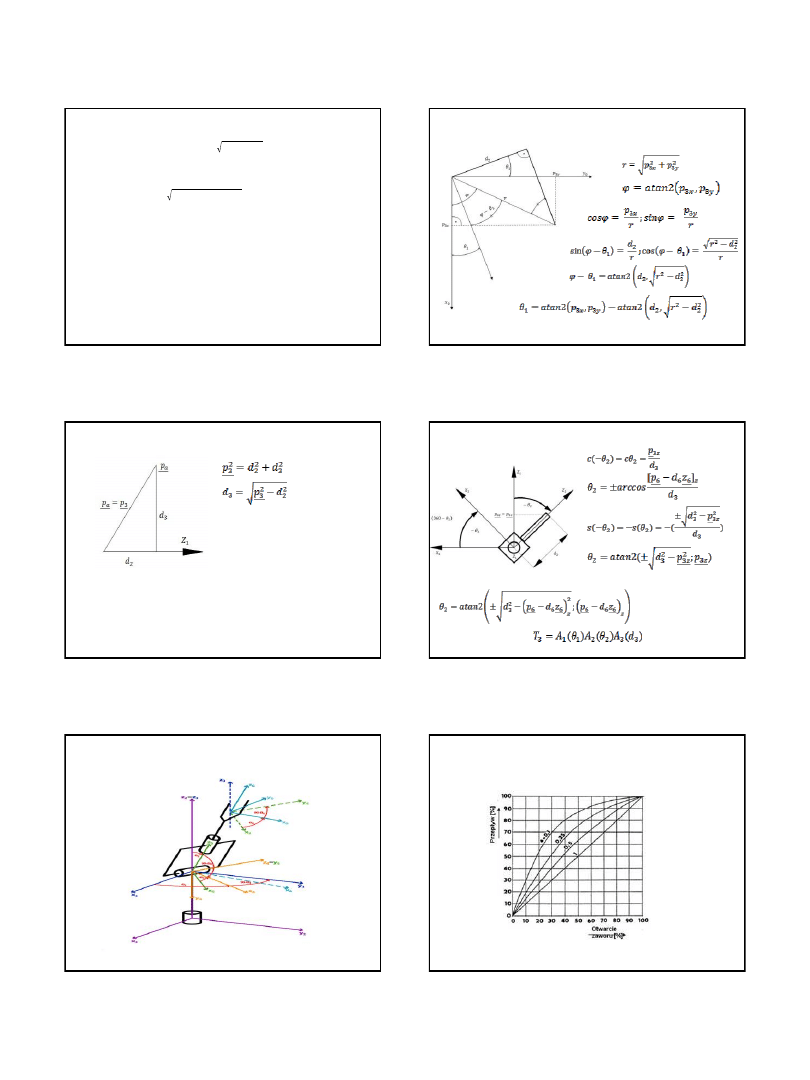
Manipulator stanfordzki
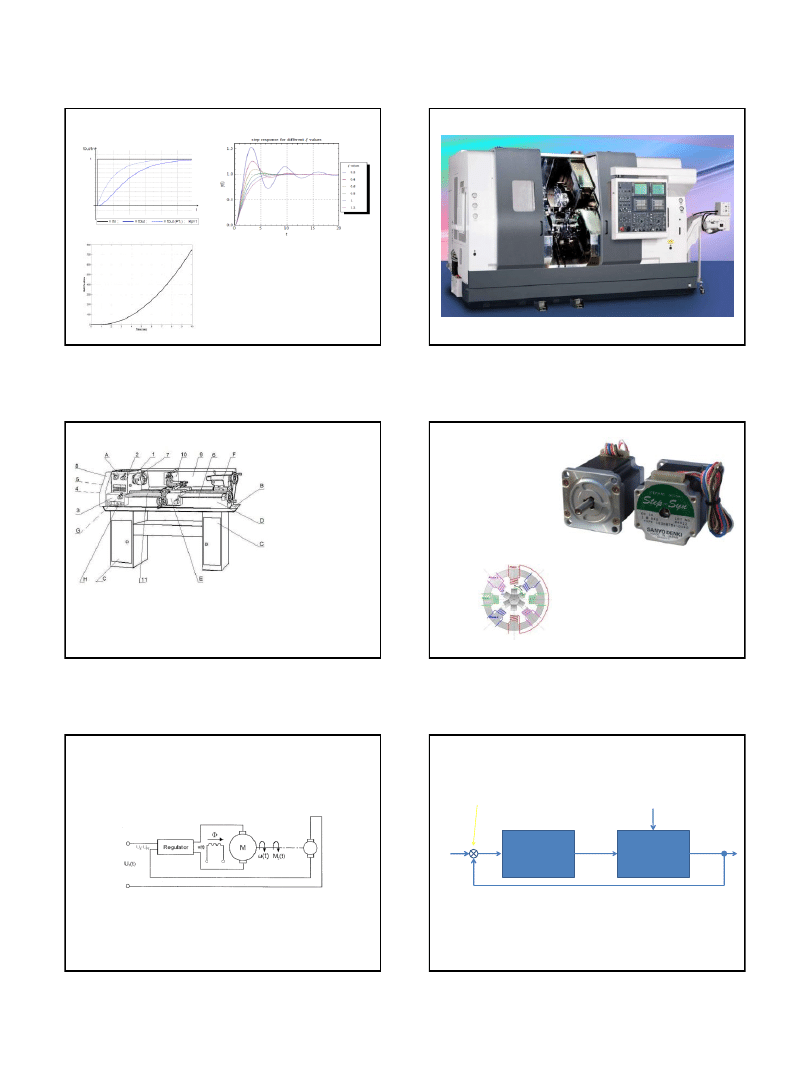
Zależność wektorów położeń ramienia i końcówki
Zadanie kinematyki odwrotnej m.stanfordzkiego
2013-06-04
2
)
;
(
2
)
;
(
2
lub
0
)
;
(
2
0
)
;
(
2
0
)
;
(
2
)
(
)
;
(
2
)
;
(
2
2
6
4
6
4
6
6
4
6
4
5
5
5
6
3
6
3
6
4
5
6
3
6
3
4
5
6
3
6
3
4
2
3
2
3
1
3
1
3
3
3
1
3
1
1
3
2
2
3
2
3
3
2
/
1
1
z
z
y
x
x
y
x
y
x
y
z
y
x
z
y
x
z
y
z
y
x
n
n
arctg
a
a
arctg
dla
n
n
arctg
dla
a
a
arctg
dla
a
a
arctg
p
p
s
p
c
d
p
p
s
p
c
arctg
d
p
d
p
p
p
arctg
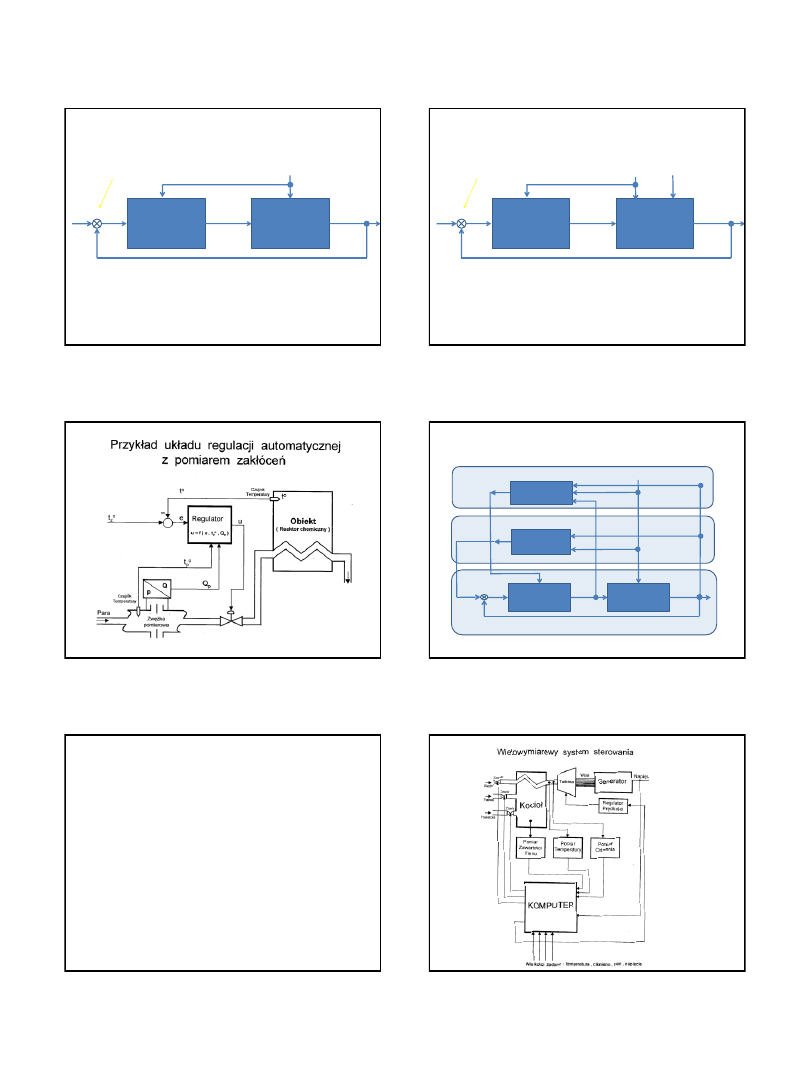
Zestawienie rozwiązań z. odwrotnego kinematyki
Wyznaczenie kąta ϴ
1
Wyznaczenie d
3
Wyznaczenie kąta ϴ
2
Kiść manipulatora stanfordzkiego
Charakterystyka statyczna
2013-06-04
3
Charakterystyki dynamiczne – odpowiedź skokowa
Obrabiarka CNC
A- wrzeciennik
B- wanna podstawy
C- podstawa (nogi: lewa, prawa)
D-
łoże z prowadnicami
E-
suport z sankami narzędziowymi
F
– konik
G- silnik elektryczny (niewidoczny
z tyłu wrzeciennika)
H- pulpit sterowniczy
1. wrzeciono z uchwytem tokarskim
2. skrzynka prędkości
3. skrzynka posuwów (patrz poz. 4 )
4. przekładnia gitarowa (po otwarciu drzwiczek „8”
)
5. przekładnia pasowa (po otwarciu drzwiczek„8”)
6. śruba pociągowa
7. osłona uchwytu
8. drzwiczki przekładni
pasowej i gitarowej
9. osłona tylna
10.osłona imaka
11.osłona śruby pociągowej
Suport
Silniki skokowe (krokowe)
Układ regulacji prędkości obcowzbudnego silnika prądu stałego
Zamknięty układ sterowania
Wielkość
sterowana
y(t)
Sygnał
zadający
w(t)
Urządzenie
sterujące
Obiekt
sterowania
Sygnał
sterujący
u(t)
Zakłócenie z(t)
Uchyb
e(t)
_
Węzeł sumacyjny
Sprzężenie zwrotne - ujemne
pomiar
)
(
)
(
)
(
t
y
t
w
t
e
2013-06-04
4
Wielkość
sterowana
y(t)
Sygnał
zadający
w(t)
Urządzenie
sterujące
Obiekt
sterowania
Sygnał
sterujący
u(t)
Zakłócenie z(t)
pomiar
Uchyb
e(t)
_
Węzeł sumacyjny
Układ zamknięty z kompensacją zakłócenia
Wielkość
sterowana
y(t)
Sygnał
zadający
w(t)
Urządzenie
sterujące
Obiekt
sterowania
Sygnał
sterujący
u(t)
Zakłócenia
z
1
(t) z
2
(t)
pomiar
Uchyb
e(t)
_
Węzeł sumacyjny
Układ zamknięty z kompensacją zakłócenia
y(t)
w(t)
Urządzenie
sterujące
Obiekt
sterowania
u(t)
y(t)
u(t)
y(t)
e(t)
_
Optymalizator
Adaptator
Warstwa sterowania bezpośredniego
Warstwa optymalizacji
Warstwa adaptacji
z(t)
Warstwy sterowania automatycznego
Klasyfikacja układów regulacji automatycznej
Ze w względu na cechę liniowości:
• liniowe
• nieliniowe
Ze w względu na liczbę wejść i wyjść
• jednowymiarowe
• wielowymiarowe
Ze w względu na charakter sygnałów
• ciągłe
• dyskretne
• binarne
2013-06-04
5
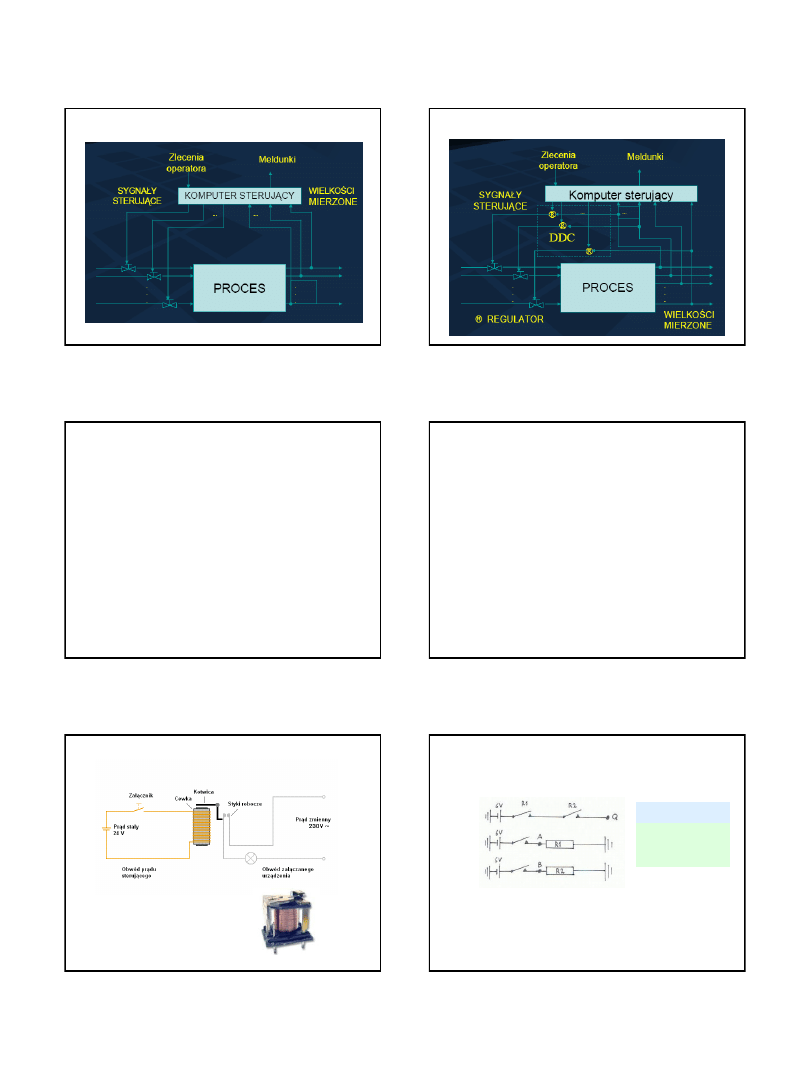
System sterowania bezpośredniego DDC
System sterowania nadrzędnego SPC
Sterowanie binarne
Początkowe próby zastąpienia klasycznych regulatorów komputerem
pokazały pewną nadmiarowość funkcjonalną komputerów-systemów
sterujących.
Poszukiwania prostszych, a co za tym idzie,
tańszych rozwiązań
zaowocowały mikroprocesorowymi konstrukcjami regulatorów o dużej
swobodzie
wyboru
algorytmów sterowania, zwanych swobodnie
programowalnymi
sterownikami
logicznymi
(Programmable
Logic
Controllers
– PLC). Rozwój takich rozwiązań był niezwykle szybki i ciągle
znajdują one szerokie zastosowania.
Sterowniki PLC
Przekaźnik
Wejścia
Wyjście
A
B
Q
0
0
0
1
0
0
0
1
0
1
1
1
Schemat układu logicznego
Rysunek schematu realizującego funkcję logiczną (Konrad Zuse – twórca
pierwszego komputera)
2013-06-04
6
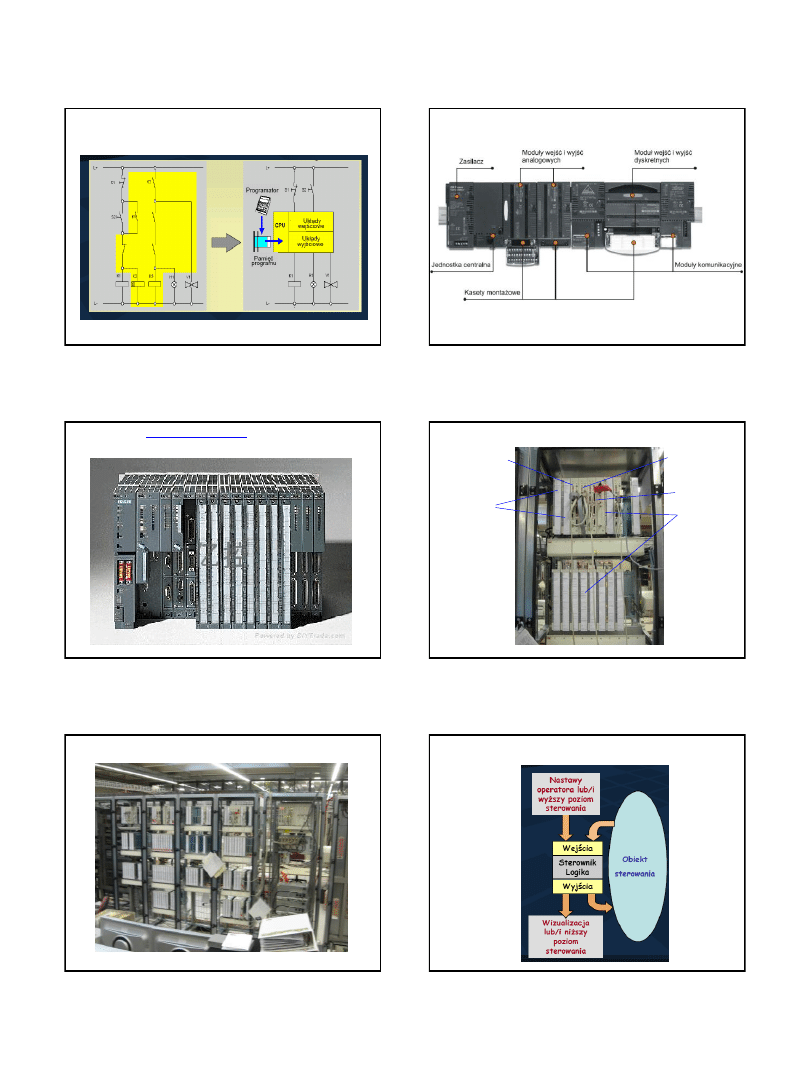
Sterowniki PLC
Sterownik PLC
Sterownik PLC VersaMax firmy Fanuc
{kind=link}
CPU1
redundant field
bus connection
CPU2
inputs/outputs
serial connections
Lokalizacja PLC w systemach sterowania
2013-06-04
7
Schemat przykładowego sterownika PLC
CPU
Real-Time
Clock
flash
EPROM
ROM
buffers
signal
conditioning
power
amplifiers
relays
signal
conditioning
serial port
controller
Ethernet
parallel bus
ethernet
controller
RS 232
analog-
digital
converters
digital-
analog
converters
Digital Output
Digital
Input
fieldbus
controller
external
I/Os
extension
bus
field bus
direct Inputs and Outputs
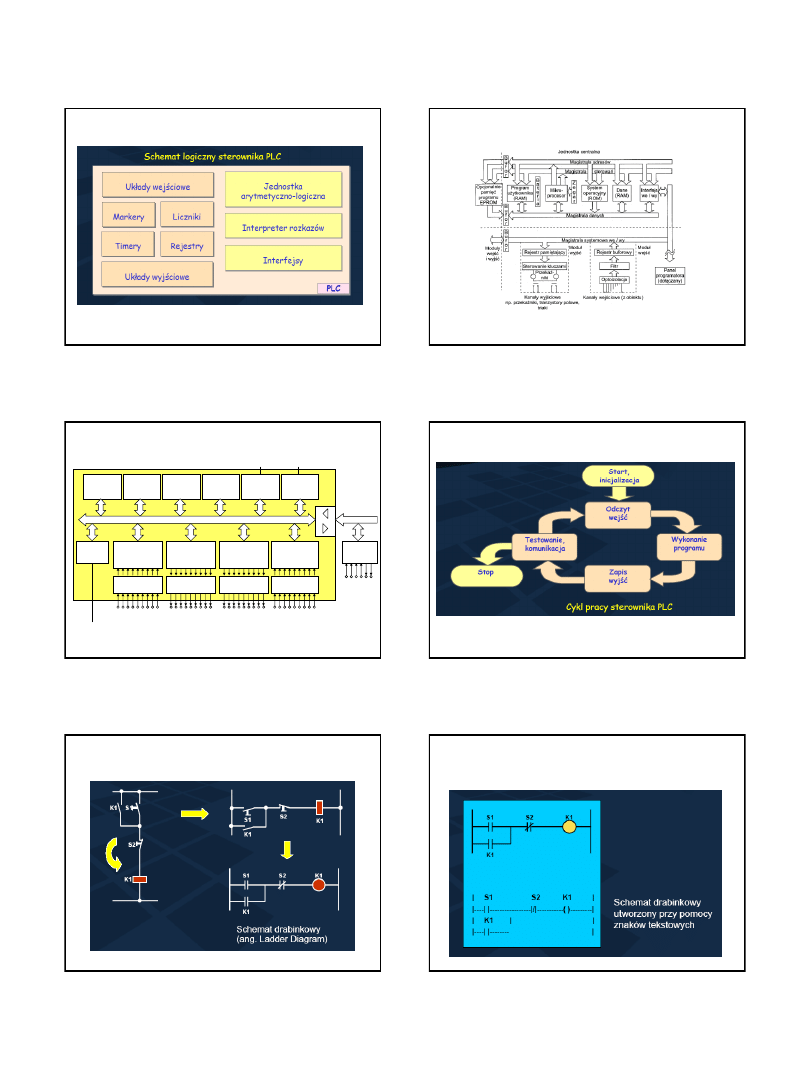
Schemat przykładowego sterownika PLC
Cykl pracy sterownika PLC
Programowanie sterowników PLC
Programowanie sterowników PLC
2013-06-04
8
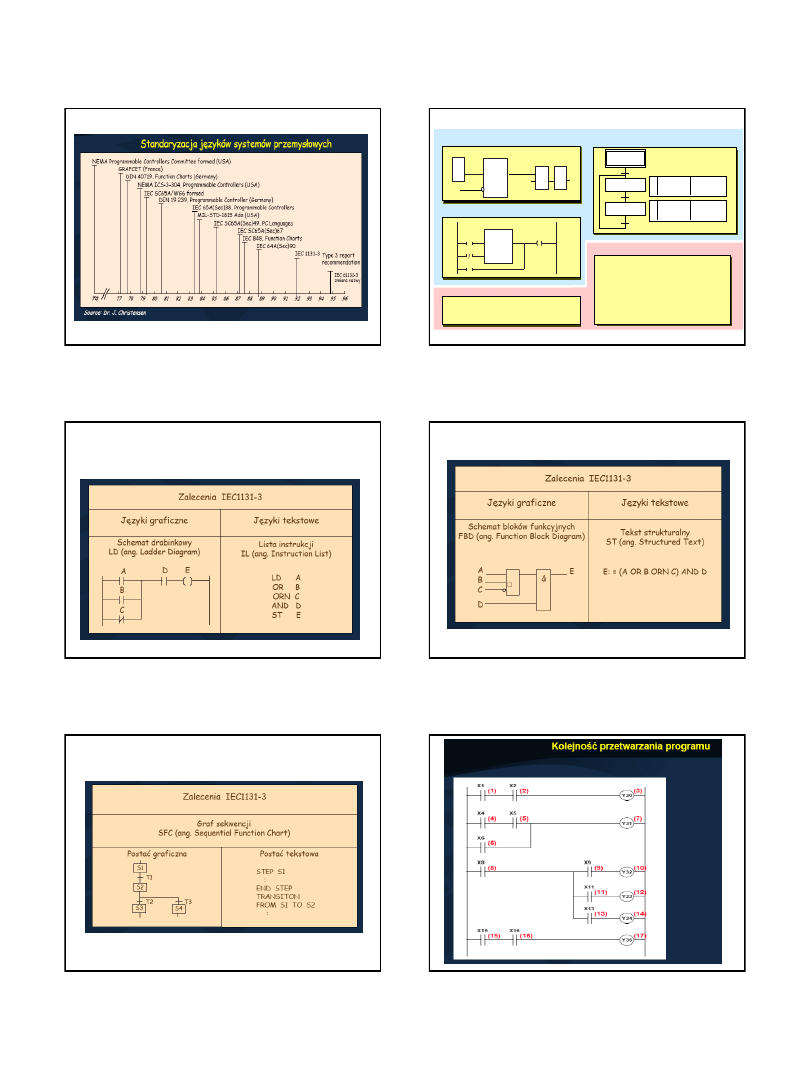
Structured Text (ST)
VAR CONSTANT X : REAL := 53.8 ;
Z : REAL; END_VAR
VAR aFB, bFB : FB_type; END_VAR
bFB(A:=1, B:=‘OK’);
Z := X - INT_TO_REAL (bFB.OUT1);
IF Z>57.0 THEN aFB(A:=0, B:=“ERR”);
ELSE aFB(A:=1, B:=“Z is OK”);
END_IF
Ladder Diagram (LD)
OUT
PUMP
Function Block Diagram (FBD)
PUMP
AUTO
MAN_ON
ACT
DO
V
Instruction List (IL)
A: LD %IX1 (* PUSH BUTTON *)
ANDN %MX5 (* NOT INHIBITED *)
ST %QX2 (* FAN ON *)
Sequential Flow Chart (SFC)
START STEP
T1
T2
D1_READY
D2_READY
STEP A
ACTION D1
N
D
ACTION D2
STEP B
D3_READY
D4_READY
ACTION D3
N
D
ACTION D4
T3
DI
V
CALC1
CALC
IN1
IN2
OUT
>=1
Języki graficzne
Języki tekstowe
AUTO
MAN_ON
ACT
CALC1
CALC
IN1
IN2
Języki programowania PLC (
IEC 61131-3)
2013-06-04
9
Przykład programu
z określeniem warunków załączenia i wyłączenia wyjścia
System programowania
Ze w względu na zadanie, które mają spełniać:
• regulacja stałowartościowa
• regulacja programowa
• regulacja nadążna
• regulacja optymalna
Ze w względu na zdolność samoczynnego dopasowywania parametrów i
charakterystyk do zmieniających się właściwości obiektów i zakłóceń:
• nieadaptacyjne
• adaptacyjne
Klasyfikacja układów regulacji automatycznej
Komputer jako urządzenie sterujące
2013-06-04
10
Struktura funkcjonalna KSS procesem przemysłowym
Klasyfikacja KSS
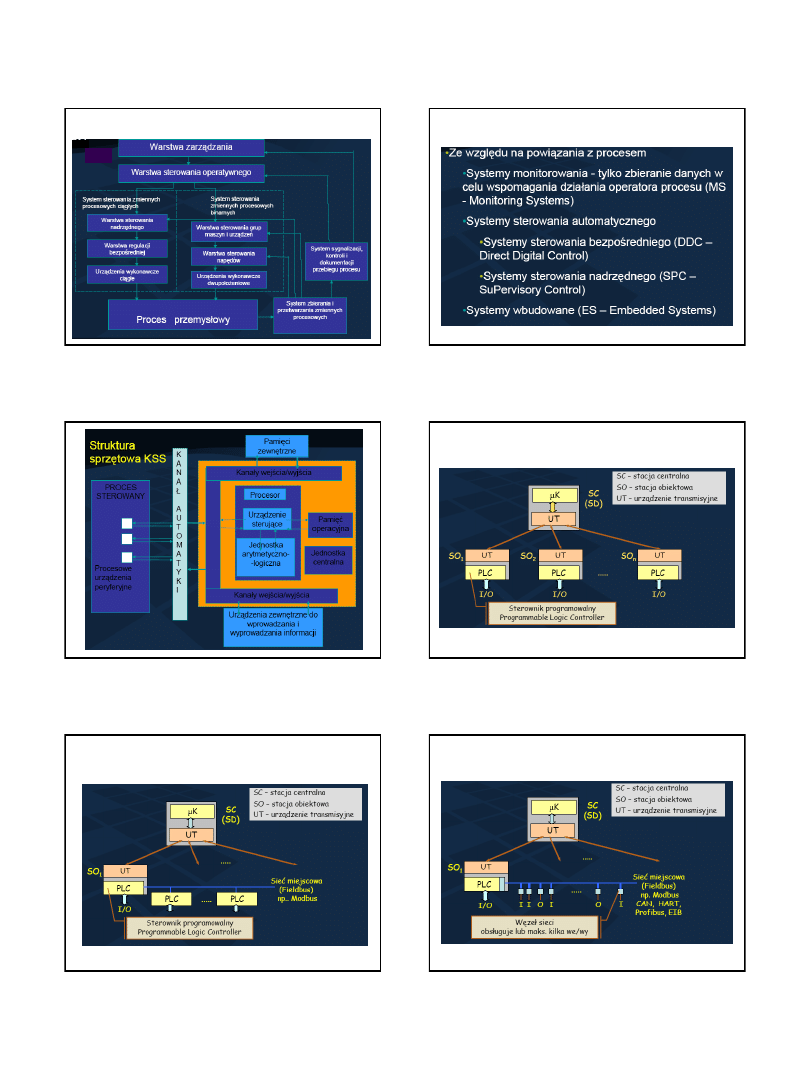
Rozproszony układ sterowania
Rozproszony układ sterowania
Sterownik rozproszony
2013-06-04
11
Enterprise Network
directly connected
I/O
Control Bus
(e.g. Ethernet)
Engineer
station
I/O
I/O
I/O
I/O
C
PU
Sensor Bus (e.g. ASI)
Field Bus
gateway
Field Stations
Control Station
with Field Bus
direct I/O
I/O
Field Devices
FB
gateway
gateway
I/O
I/O
I/O
I/O
C
PU
C
O
M
I/O
I/O
I/O
C
O
M
C
PU
C
O
M
C
O
M
C
O
M
I/O
Field Bus
C
PU
C
O
M
2
I/O
I/O
I/O
C
PU
C
O
M
1
C
O
M
2
I/O
C
PU
Operator
station
large
PLCs
small PLC
very simple PLCs
PLC
PLC
C
O
M
1
C
O
M
1
Supervisor
Station
System wizualizacji
System wizualizacji
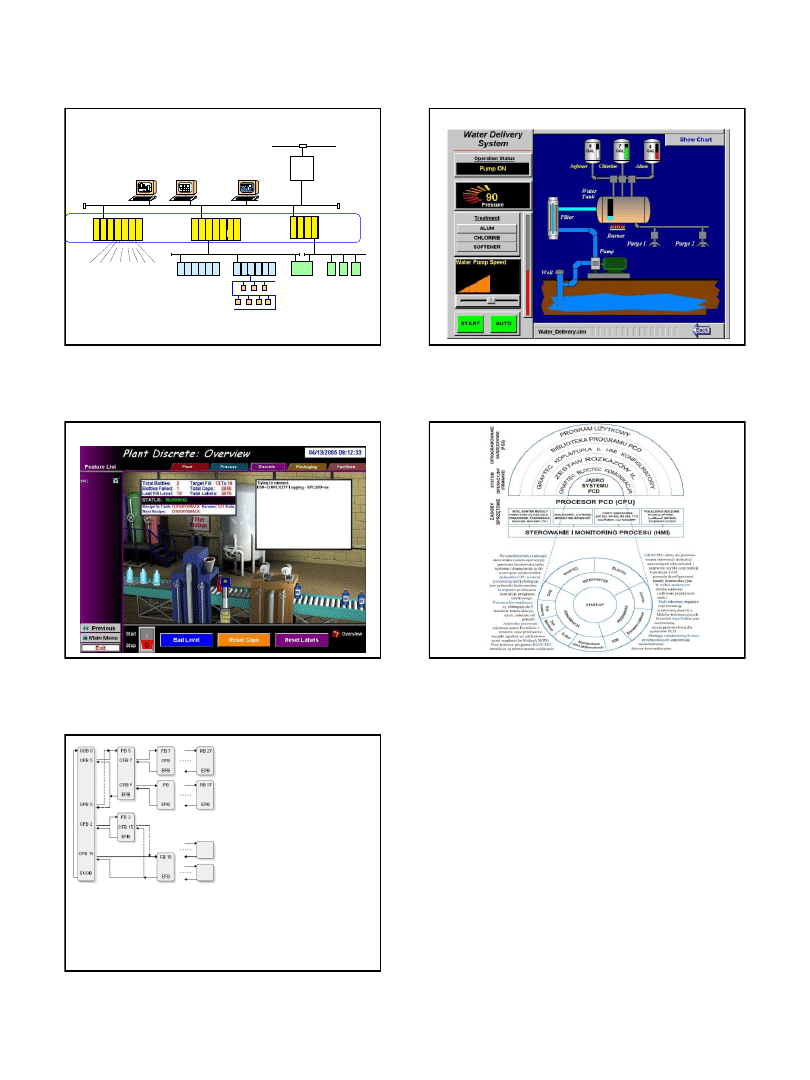
Cyclic organization block - COB
W strukturze
programów opartej na
logice BLOCTEC bloki organizacy-
jne - COB
określają kolejność
przetwarzania
programów. Zawie-
rają wywołania bloków funkcyjnych i
bloków programowych. Po zakoń-
czeniu przetwarzania
wywołanego
bloku, sterowanie przetwarzaniem
powraca do COB i jest konty-
nuowane
z
tego
miejsca.
Po
zakończeniu wszystkich instrukcji
danego
COB
sterowanie
jest
przekazywane do
następnego COB.
Program block PB
PB zawiera operacje,
które tworzą
logiczne
związki funkcjonalne: Ze
względów
praktycznych
każdy
proces
podlegający sterowaniu jest
dzielony na jednostki funkcjonalne.
Jednostkom takim przypisuje
się
bloki programowe.
Bloki funkcyjne (Function block FB)
Często używane funkcje są oprogramowane w
blokach funkcyjnych.
Można je traktować jako
podprogramy,
zawierające często wykorzystywa-
ne elementarne sekwencje operacji przetwarza-
nia. Aby
mogły być wykorzystywane w wielu apli-
kacjach,
są często przechowywane w bibliote-
kach.
Są wywoływane z różnymi parametrami.
Wyszukiwarka
Podobne podstrony:
1AiR dla FT
3AiR dla FT id 36589 Nieznany
4AiR dla FT
1AiR dla FT
FT cykl 07 8 dla I II III roku
gruźlica dla studentów2
Prezentacja 2 analiza akcji zadania dla studentow
1Ochr srod Wyklad 1 BIOLOGIA dla studid 19101 ppt
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
higiena dla studentów 2011 dr I Kosinska
Parametry życiowe dla WCEM
PREZENTacja dla as
Wyklad FP II dla studenta
badanie dla potrzeb fizjoterapii
więcej podobnych podstron