2013-06-04
1
Automatyka i Robotyka
1.
Bubnicki Z.: Teoria i algorytmy sterowania. WNT, Warszawa, 2002.
2.
Czemplik A.: Modele dynamiki układów fizycznych dla inżynierów.
Zasady i przykłady konstrukcji modeli dynamicznych obiektów
automatyki. WNT, Warszawa, 2008.
3.
Kaczorek T., A. Dzieliński, W. Dąbrowski, R. Łopatka: Podstawy teorii
sterowania. WNT, Warszawa, 2006.
4.
Mazurek J., H.Vogt, W. Żydanowicz: Podstawy Automatyki. Oficyna
Wyd. Politechniki Warszawskiej, Warszawa, 2006.
5.
Rumatowski K.: Podstawy Automatyki. Część 1. Układy liniowe o
działaniu ciągłym. WPP, Poznań, 2004.
6.
Rumatowski K.: Podstawy regulacji automatycznej. WPP, Poznań,2008.
7.
Zieliński T. P.: Cyfrowe przetwarzanie sygnałów: od teorii do
zastosowań. Wydawnictwa Komunikacji i Łączności, Warszawa 2005.
Literatura (automatyka)
1.
Buratowski, T.: Podstawy robotyki. Uczelniane Wydawnictwa Naukowo
–
Dydaktyczne AGH ,
Kraków, 2006.
2.
Jezierski, E.: Dynamika
robotów. WNT, Warszawa, 2006.
3.
Honczarenko, J.: Roboty
przemysłowe: Budowa i zastosowanie. WNT,
Warszawa, 2010.
4.
Zdanowicz, R.: Podstawy robotyki. Wyd. Polit.
Śląskiej. Gliwice, 2010.
5.
Morecki, A., Knapczyk, J.: Podstawy robotyki. Teoria i elementy
manipulatorów. WNT, Warszawa, 1999.
6.
Craig, J.J.
– Wprowadzenie do robotyki. Mechanika i sterowanie, WNT
1993.
7.
Spong, M. W., M. Vidysagar
– Dynamika i sterowanie robotów WNT
Warszawa 1997.
8.
McKerrow, Ph. J.
– Introduction to Robotics, Addison-Wesley 1991.
9.
Fu, K.S R.C. Gonzalez, C.S.G. Lee
– Robotics: Control, Sensing, Vision,
and Intelligence, McGraw-Hill Book Comp.1989.
Literatura (robotyka)
Automatyka jest
nauką o sterowaniu w systemach technicznych, jest
jednocześnie dziedziną wiedzy, która zajmuje się możliwościami
ograniczenia lub wyeliminowania
udziału człowieka w czynnościach
zwianych ze sterowaniem.
Automatyka – cybernetyka techniczna
Historia automatyki
może być podzielona na następujące okresy:
• wczesny okres (do 1900 roku),
• okres przedklasyczny (1900–1940),
• okres klasyczny (1935–1960) i
• okres nowoczesny (po 1955 roku).
Historia automatyki
Czółna z odsadnią
2013-06-04
2
Najdawniejszy automat, o znanej zasadzie
działania, został zbudowany w III
wieku p.n.e. przez Ktesibiosa z Aleksandrii i zastosowany do regulacji
przepływu wody w bardzo dokładnym i skomplikowanym zegarze wodnym.
Zegar wodny
Zegar wodny Ktesibiosa
należący do zbiorów
Muzeum w Monachium
– jego rekonstrukcja.
XIX
wieczna
ilustracja
przedstawiająca
starożytny
zegar Ktesibiosa
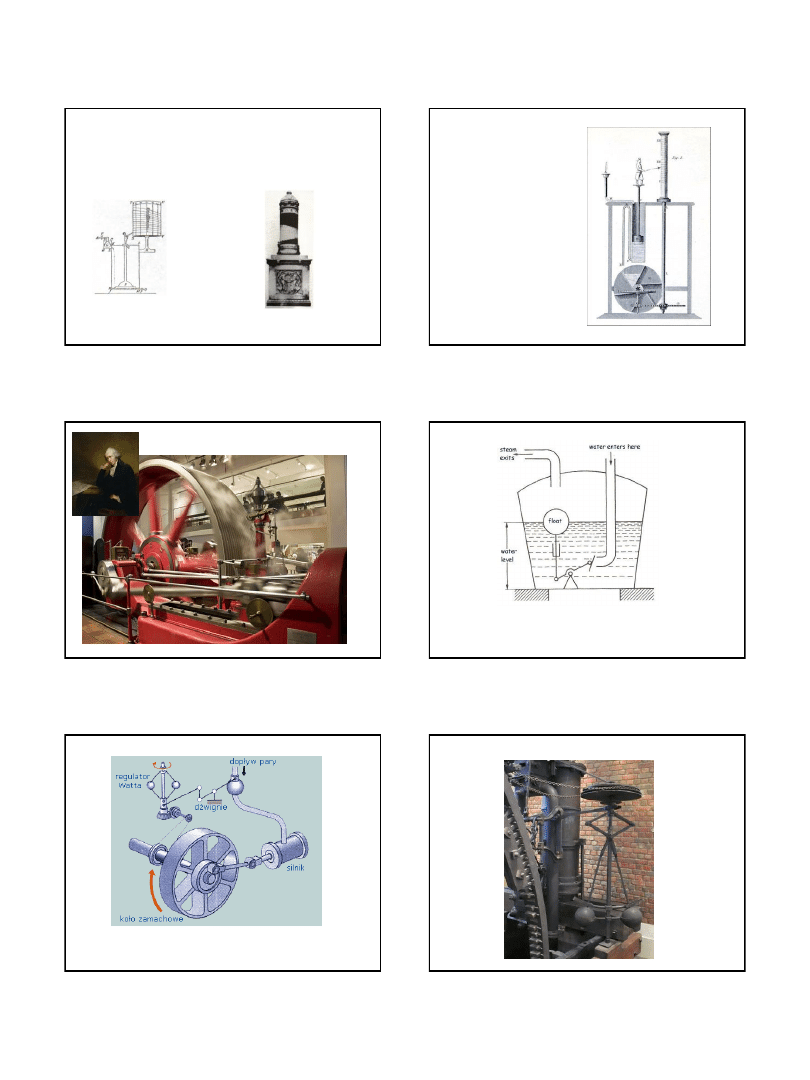
Maszyna parowa i regulator prędkości
Pływakowy regulator Połzunowa z 1765r
Odśrodkowy regulator J.Watta z 1784r
2013-06-04
3
Kolejnymi udokumentowanymi krokami w rozwoju automatyki
były:
• zastosowanie regulatora ciśnienia gazu w sieci gazowej służącej
do
oświetlania ulic Londynu w 1820 roku (za pomocą lamp gazowych)
• wynalezienie bimetalicznego regulatora temperatury (Ure, 1830)
• pojawienie się w połowie XIX wieku pierwszych maszyn sterowanych
dla
statków, które zawierały w swoim układzie sprzężenie zwrotne.
Rozwój regulatorów i serwomechanizmów
Równania różniczkowe
W
1868
roku
James
Clerk
Maxwell
(odkrywca
równań pola
elektromagnetycznego)
opisał jak wyprowadzić liniowe równania
różniczkowe dla różnych mechanizmów regulatora i przedstawił analizę
stabilności dla odśrodkowego regulatora obrotów.
W latach 1892
–1898 Oliver Heaviside wynalazł rachunek operatorowy,
przebadał zachowania systemu w stanie nieustalonymi wprowadził
pojęcie odpowiadające późniejszej transmitancji.
W latach 20 i 30. XX wieku
ideę Heaviside’a (pojęcie odpowiadające
późniejszej transmitancji) powiązano z przekształceniami całkowymi
Fouriera i
Laplace’a (Bromwich, Carson, van der Pol, Doetsch), co
spowodowało, że pojawiły się szersze możliwości wykorzystania
rachunku
operatorów w wielu zagadnieniach fizyki i techniki, a także w
zagadnieniach
automatycznej
regulacji
układów mechanicznych.
Doszukanie
się tych powiązań dowiodło też ostatecznie słuszności
metod
Heaviside’a.
Rachunek operatorowy
Metoda częstotliwościowa
W Bell Labs(laboratoriach telefonicznych Bella) w latach 20. i 30. XX wieku
badano i stosowano w systemach telekomunikacji
podejście oparte na
dziedzinie
częstotliwościowej, którego podstawą były metodyki: Pierre
Simon de
Laplace’a, Jean Baptiste Joseph Fouriera, Augustin Louis
Cauchy’ego.
Z tego okresu
datują się ogólne metody syntezy układów regulacji
automatycznej oparte na charakterystykach
częstotliwościowych (Harold
Stephen Black, Harry Nyquist, Hendrik Wade Bode).
Powstały wówczas m.in. takie urządzenia jak:
•automatyczny pilot do samolotów,
•systemy pozycjonowania dział,
•systemy sterowania antenami radarów
•Inne systemy wojskowe oparte na sprzężeniu zwrotnym.
Dalszy
rozwój dostępnych technik sterowania stał się niezbędny z uwagi
na
złożoność i oczekiwania co do możliwości takich systemów
wojskowych.
Wzmogło to zainteresowanie systemami sterowania i
zaowocowało nowymi pomysłami i metodami.
II wojna światowa
Cybernetyka czyli sterowanie i przekazywanie informacji w organizmie
żywym i w maszynie
Norbert Wiener
2013-06-04
4
Zastosowanie informatyki w automatyce jest powodowane m.in. przez:
• zastępowanie urządzeń analogowych urządzeniami cyfrowymi,
• rozwój systemów operacyjnych czasu rzeczywistego.
• Rozwój języków programowania ukierunkowanych na regulację i
sterowanie tzw. controlware
– są to między innymi specjalistyczne języki
programowania przeznaczone do
zastosowań w sterowaniu, języki
przeznaczone do programowania
sterowników programowalnych,
• języki do programowania układów napędowych.
• Włączenie regulatorów do sieci komputerowych umożliwiło m.in. zdalny
odczyt i nastawianie ich
parametrów, diagnostykę parametrów procesu i
regulatora i
zdalną zmianę algorytmu regulacji.
Fuzja automatyki i informatyki
Zastosowania automatyki
przyczyniły się m.in. do tego, że:
• możliwe stały się loty kosmiczne,
• mogły powstać satelity komunikacyjne,
• samoloty stały się bezpieczniejsze i bardziej wydajne
• silniki samochodów i procesy chemiczne mniej zanieczyszczają środowisko
• wytwarzanie stało się szybkie i wydajne dzięki zastosowaniu elastycznych
(programowalnych)
systemów wytwarzania z zastosowaniem robotów.
Zastosowania automatyki
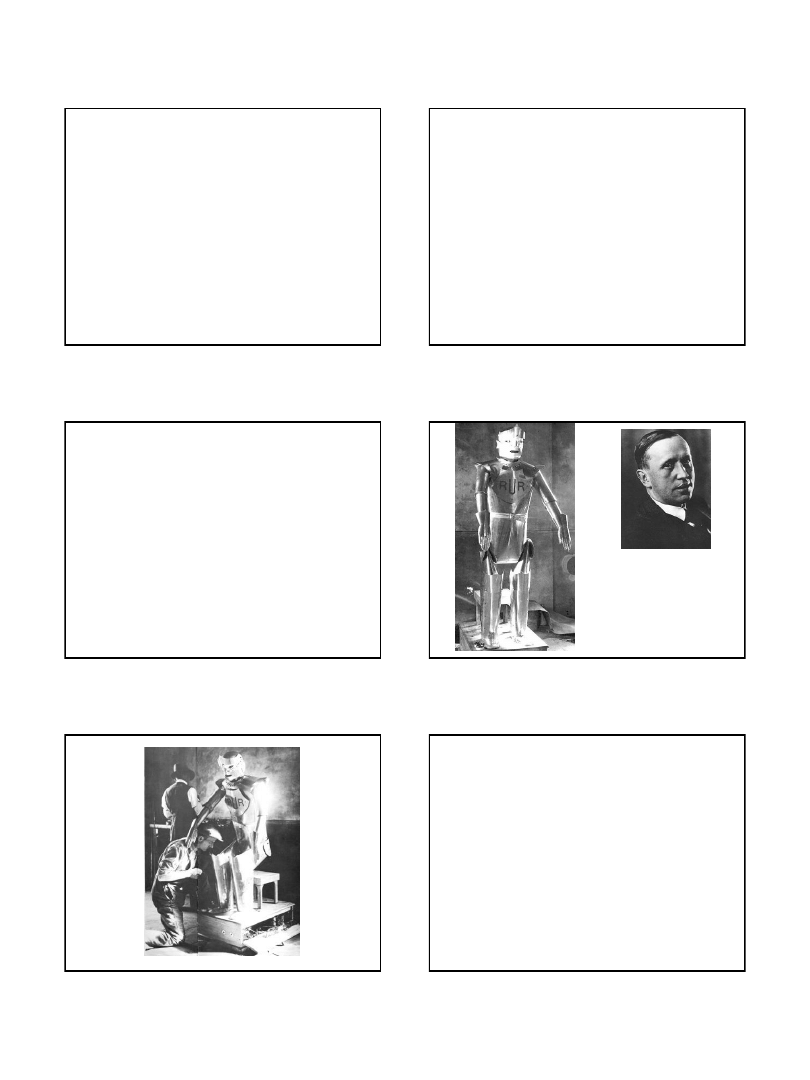
Robotyka
Karel Čapek
(1890-1938)
1920:
R.U.R. (Rosumovi Umělí Roboti)
R.U.R. (Roboty Uniwersalne Rosuma)
Prawo zerowe:
Robot nie może szkodzić ludzkości, ani nie może, przez zaniedbanie, narazić
ludzkości na szkodę.
Prawo pierwsze:
Robot nie może zranić istoty ludzkiej ani nie może przez zaniedbanie, narazić
człowieka na zranienie, chyba że narusza to prawo o wyższym priorytecie.
Prawo drugie:
Robot musi spełniać polecenia wydawane przez człowieka, poza poleceniami
sprzecznymi z prawami o wyższym priorytecie.
Prawo trzecie:
Robot musi chronić samego siebie dopóty, dopóki nie jest to sprzeczne z
prawem o wyższym priorytecie.
Prawa robotyki Assimova
2013-06-04
5
Devol i Engelberger
Puma (Programmable Universal Machine for Assembly)
2013-06-04
6
Robotyka jest dziedziną nauki i techniki, zajmującą się wszystkimi
problemami dotyczącymi mechaniki, sterowania ruchem, sensoryki,
inteligencji maszynowej, projektowania, zastosowań i eksploatacji
manipulatorów, robotów i maszyn kroczących.
Robot to urządzenie techniczne, przeznaczone do zastępowania człowieka
przy wykonywaniu określonych czynności manipulacyjnych, przystosowane
do realizacji różnych, łatwo zmienianych programów ruchu manipulacyjno-
transportowego, użytecznego w procesie produkcyjnym.
(A. Morecki)
Definicje
Roboty są automatami ruchowymi o uniwersalnym przeznaczeniu,
wyposażonymi w wiele osi, których ruch, zarówno pod względem jego
sekwencji, jak i jego rodzaju, jest swobodnie programowalny, tzn., może
być zmieniany bez mechanicznej ingerencji. Są one wyposażone w
chwytaki, narzędzia oraz inne oprzyrządowanie. Mogą wykonywać
czynności manipulacyjne oraz zadania wytwórcze.
(norma niemiecka)
Definicje
2013-06-04
7
Manipulating industrial robot as defined in ISO 8373:
An automatically controlled, reprogrammable, multipurpose, manipulator
programmable in three or more axes, which may be either fixed in place or
mobile for use in industrial automation applications.
W tłumaczeniu:
Manipulacyjny robot przemysłowy to:
automatycznie sterowany, reprogramowalny manipulator o uniwersalnym
przeznaczeniu, wyposażony w co najmniej trzy osie ruchu, których ruch
podlega programowaniu, umocowany lub mobilny, przeznaczony do
automatyzacji procesów przemysłowych.
Definicje
Źródła informacji
Źródła energii
Procesor
informacji
Urządzenie
wykonawcze
(manipulator)
Przestrzeń robocza - środowisko
Robot
Sterowania
Pomiary
Język programowania
Obserwacje
Oddziaływania
Sieci
komunikacyjne
2013-06-04
8
2013-06-04
9
Opportunity
2013-06-04
10
Inspektor
Gordon Moore
Prawo Moore'a
W 1965 roku Gordon Moore,
analizując wykresy
wzrostu
wydajności obwodów scalonych, zauważył,
że każdy nowa generacja układów zawiera około
dwa razy
więcej elementów niż poprzednia a okres
pomiędzy kolejnymi generacjami wynosi ok. 18-24
miesięcy. Wynika stąd eksponencjalny wzrost
wydajności komputerów.
Prawo Moore’a
2013-06-04
11
Roje Robotów czyli
inteligencja rozproszona
Koniec wprowadzenia do
automatyki i robotyki
Wyszukiwarka
Podobne podstrony:
2AiR dla FT
3AiR dla FT id 36589 Nieznany
4AiR dla FT
FT cykl 07 8 dla I II III roku
gruźlica dla studentów2
Prezentacja 2 analiza akcji zadania dla studentow
1Ochr srod Wyklad 1 BIOLOGIA dla studid 19101 ppt
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
higiena dla studentów 2011 dr I Kosinska
Parametry życiowe dla WCEM
PREZENTacja dla as
Wyklad FP II dla studenta
badanie dla potrzeb fizjoterapii
więcej podobnych podstron