2013-06-04
1
Stabilność układów liniowych
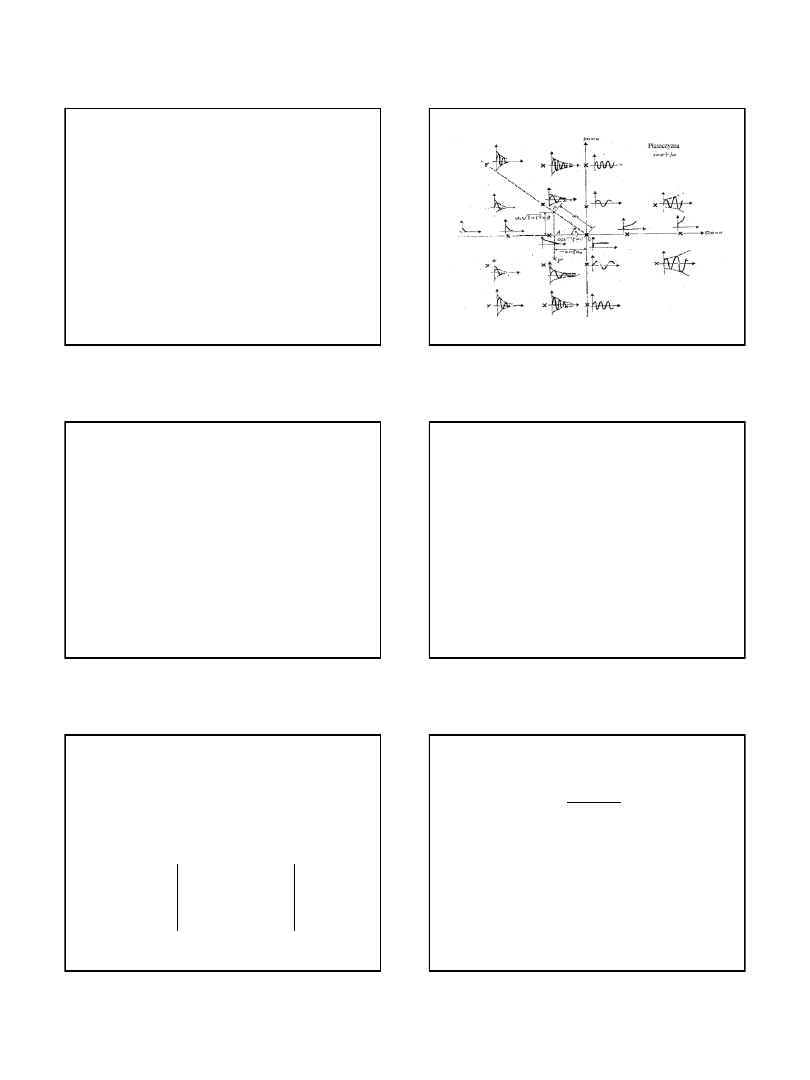
Człony podstawowe
Warunek konieczny i wystarczający stabilności
układu liniowego
Warunkiem koniecznym i
wystarczającym stabilności asymptotycznej układu
liniowego,
ciągłego, stacjonarnego jest, aby wszystkie bieguny jego transmitancji
operatorowej
leżały w lewej półpłaszczyźnie zmiennej zespolonej s.
Kryteria stabilności
‐Kryteria algebraiczne (Hurwitza, Routha)
‐Kryteria częstotliwościowe (Nyquista, Michajłowa)
Algebraiczne kryterium stabilności Hurwitza
0
2
3
1
4
2
5
3
1
0
0
0
0
0
a
a
a
a
a
a
a
a
a
a
a
n
n
n
n
n
n
n
n
n
n
Warunkiem koniecznym i
wystarczającym stabilności asymptotycznej układu
liniowego stacjonarnego,
ciągłego, o parametrach skupionych jest spełnienie
następujących warunków:
1. Wszystkie
współczynniki równania charakterystycznego układu są tego samego
znaku
2. Wszystkie podwyznaczniki
główne wyznacznika Hurwitza oraz on sam są
dodatnie.
Przykład
Dla jakiego wzmocnienia k
układ zamknięty jest stabilny, gdy transmitancja układu
otwartego ma postać:
)
1
)(
1
(
)
(
2
1
s
T
s
T
k
s
G
2013-06-04
2
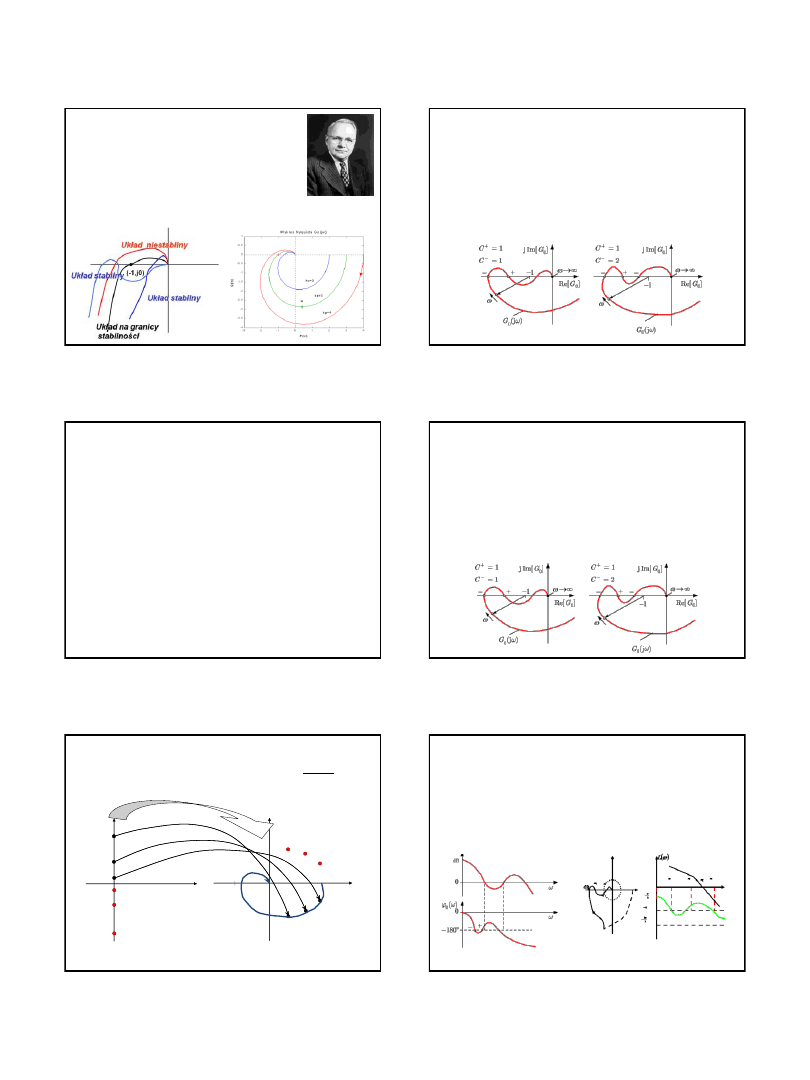
Częstotliwościowe kryterium Nyquista
Twierdzenie 1.
Jeżeli układ otwarty jest stabilny asymptotycznie, to układ
zamknięty jest stabilny asymptotycznie wtedy i tylko wtedy,
gdy wykres charakterystyki amplitudowo-fazowej
układu
otwartego, przy zmianie pulsacji
ω od zera do +∞, nie
obejmuje punktu (-1, j0).
Harry Nyquist
(1889
–1976)
P(
ω)
jQ(
ω)
Kryterium Nyquista
Twierdzenie 1.
Jeżeli układ otwarty jest stabilny asymptotycznie, to układ zamknięty jest
stabilny asymptotycznie wtedy i tylko wtedy, gdy
różnica liczby przejść
dodatnich i ujemnych wykresu charakterystyki amplitudowo-fazowej
układu
otwartego z
częścią osi rzeczywistych z lewej strony punktu (-1, j0) jest
równa zeru, przy zmianie pulsacji ω od zera do +∞.
Kryterium Nyquista
Twierdzenie 2.
Jeżeli układ otwarty jest niestabilny i jego transmitancja operatorowa ma p
biegunów w prawej półpłaszczyźnie zmiennej zespolonej, to układ
zamknięty jest stabilny asymptotycznie wtedy i tylko wtedy, gdy wykres
charakterystyki amplitudowo-fazowej
układu otwartego, przy zmianie
pulsacji
ω od zera do +∞, obejmuje punkt (-1, j0) p/2 razy w kierunku
przeciwnym do ruchu
wskazówek zegara.
Kryterium Nyquista
Twierdzenie 2.
Jeżeli układ otwarty jest niestabilny i jego transmitancja operatorowa ma p
biegunów w prawej półpłaszczyźnie zmiennej zespolonej, to układ
zamknięty jest stabilny asymptotycznie wtedy i tylko wtedy, gdy różnica
liczby
przejść dodatnich i ujemnych wykresu charakterystyki amplitudowo-
fazowej
układu otwartego z częścią osi rzeczywistych z lewej strony
punktu (-1, j0) jest
równa p/2, przy zmianie pulsacji ω od zera do +∞.
σ
jω
jω
1
jω
2
jω
n
-
jω
1
-
jω
2
-
jω
n
G(jω
n
)
G(jω
2
)
G(jω
1
)
ImG(jω)
ReG(jω)
G(jω)
Transmitancja widmowa
0
1
)
(
1
)
(
)
(
)
(
s
G
s
G
s
G
s
G
o
o
o
z
-1
ω=0
Logarytmiczne kryterium Nyquista
Twierdzenie 1.
Jeżeli układ otwarty jest stabilny asymptotycznie, to układ zamknięty jest
stabilny asymptotycznie wtedy i tylko wtedy, gdy dla pulsacji
ω € (0, +∞), dla
których Lm(ω) > 0, logarytmiczna charakterystyka fazowa φ(ω) przecina
parzystą liczbę razy poziom φ = -π
Lm(
ω)
2013-06-04
3
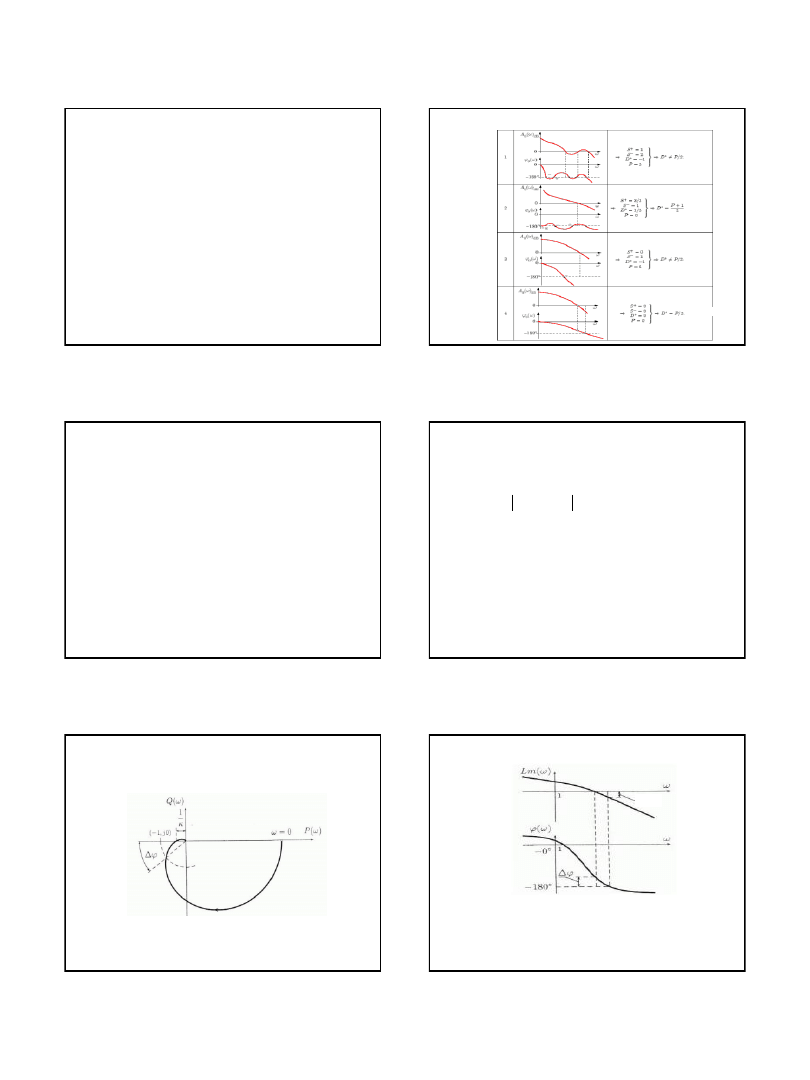
Logarytmiczne kryterium Nyquista
Twierdzenie 2.
Jeżeli układ otwarty nie jest stabilny i ma w prawej PP zmiennej zespolonej p
biegunów, to układ zamknięty jest stabilny asymptotycznie wtedy i tylko
wtedy, gdy dla pulsacji
ω € (0, +∞), dla których Lm(ω) > 0, liczba przecięć
dodatnich logarytmicznej charakterystyki fazowej
φ(ω) z poziomem φ = -π
jest
większa o p/2 od liczby jej przecięć ujemnych.
Przykłady
niestabilny
niestabilny
stabilny
stabilny przy
2 biegunach
w początku
układu
Jakość sterowania
Kryteria jakości sterowania:
1.
Kryteria zapasu stabilności
2.
Dokładność statyczna
3.
Dokładność dynamiczna
4. Przeregulowanie
5. Czas regulacji
6. Pasmo przenoszenia
Parametry charakterystyk częstotliwościowych
Częstotliwość graniczna modułu – ω
m
:
0
)
(
1
)
(
.
m
m
otw
Lm
j
G
Częstotliwość graniczna fazy - ω
-
π
:
180
)
(
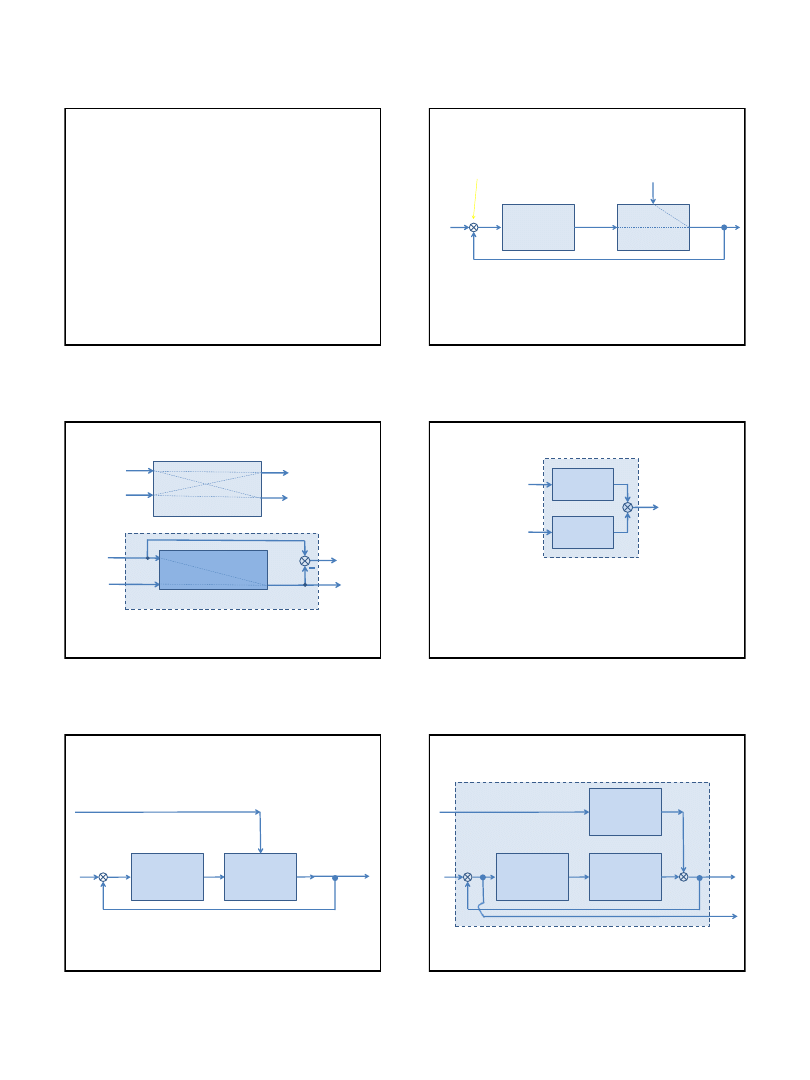
Zapas stabilności modułu i fazy
Logarytmiczny zapas stabilności modułu i fazy
Logarytmicznym zapasem
stabilności modułu URA nazywamy odchylenie loga-
rytmicznej charakterystyki
modułu układu otwartego od wartości 0 dB dla pulsacji ω
-
π.
Zapasem
stabilności fazy URA nazywamy odchylenie charakterystyki fazowej układu
otwartego od
wartości (-π) dla pulsacji ω
m
.
ΔLm
)
(
.
otw
Lm
Lm
)
(
.
m
otw
2013-06-04
4
Dokładność statyczna
Miarą dokładności statycznej URA jest uchyb ustalony:
)
(
lim
)
(
lim
0
.
s
sE
t
e
e
s
t
ust
Układ Regulacji Automatycznej (URA)
Wielkość
sterowana
y(t)
Sygnał
zadający
w(t)
Urządzenie
sterujące
Obiekt
sterowania
Sygnał
sterujący
u(t)
Zakłócenie z(t)
Uchyb
e(t)
_
Węzeł sumacyjny
Sprzężenie zwrotne - ujemne
pomiar
)
(
)
(
)
(
t
y
t
w
t
e
Transmitancja macierzowa URA
E(s)
W(s)
Z(s)
Y(s)
Y(s)
)
(
)
(
)
(
s
Y
s
W
s
E
W(s)
Z(s)
E(s)
Y(s)
URA
URA
G
oz
(s)
G
ou
(s)
Z(s)
U(s)
Y(s)
Obiekt regulacji
Zakłócenie może działać na:
‐ innym wejściu niż sygnał U(s)
‐ wejściu sygnału U(s)
‐ wyjściu obiekty
Układ Regulacji Automatycznej (URA)
W(s)
Y(s)
_
G
o
(s)
G
r
(s)
E(s)
U(s)
Z(s)
URA
Układ Regulacji Automatycznej (URA)
Z(s)
G
oz
(s)
E(s)
W(s)
Y(s)
_
G
ou
(s)
G
r
(s)
E(s)
U(s)
)
(
)
(
)
(
s
G
s
G
s
G
ou
r
2013-06-04
5
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
s
Z
s
G
s
W
s
G
s
Y
s
Z
s
G
s
W
s
G
s
E
yz
yw
ez
ew
Transmitancja macierzowa URA
)
(
)
(
1
)
(
)
(
)
(
1
)
(
)
(
)
(
)
(
1
)
(
)
(
)
(
1
1
)
(
s
Z
s
G
s
G
s
W
s
G
s
G
s
Y
s
Z
s
G
s
G
s
W
s
G
s
E
oz
oz
W(s)
Z(s)
E(s)
Y(s)
URA
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
s
Z
s
W
s
G
s
G
s
G
s
G
s
Y
s
E
yz
yw
ez
ew
Transmitancja macierzowa URA
)
(
1
)
(
)
(
)
(
1
)
(
)
(
)
(
1
)
(
)
(
)
(
1
1
)
(
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
G
oz
yz
yw
oz
ez
ew
.
.
.
.
.
0
0
.
.
.
0
.
)
(
)
(
lim
)
(
)
(
lim
)
(
)
(
)
(
1
)
(
)
(
)
(
)
(
1
1
)
(
)
(
lim
)
(
lim
zakł
ust
nad
ust
ust
ez
s
ew
s
ust
otw
oz
otw
s
t
ust
e
e
e
s
Z
s
sG
s
W
s
sG
e
s
Z
s
s
G
s
G
s
W
s
s
G
s
E
s
sE
t
e
e
Dokładność statyczna
Astatyzm URA
Jeżeli transmitancja układu otwartego (toru głównego) URA ma k biegunów
zerowych to,
zakładając, że wielomian M(s) nie ma pierwiastków zerowych,
może być przedstawiona w postaci:
a transmitancja uchybowa w postaci
Mówimy, że URA będzie względem sygnału zadającego układem:
- statycznym,
jeśli k=0 i jego transmitancja uchybowa G
e
(s) nie ma zer
zerowych
- astatycznym ze stopniem astatyzmu
l, jeśli k=
l
URA jest astatyczny
względem zakłócenia ze stopniem astatyzmu
l
,
jeśli
tansmitancja uchybowo-
zakłóceniowa G
ez
(s) ma
l
zer zerowych.
)
(
)
(
)
(
s
M
s
s
L
s
G
k
)
(
)
(
)
(
)
(
s
M
s
s
L
s
M
s
s
G
k
k
e
Odtwarzanie sygnałów wielomianowych
Twierdzenie:
URA ze stopniem astatyzmu
równym
l
względem sygnału zadającego
odtwarza z uchybem ustalonym
równym zeru tylko te sygnały z klasy
sygnałów wielomianowych, których pochodne począwszy od rzędu
l
są
równe zeru.
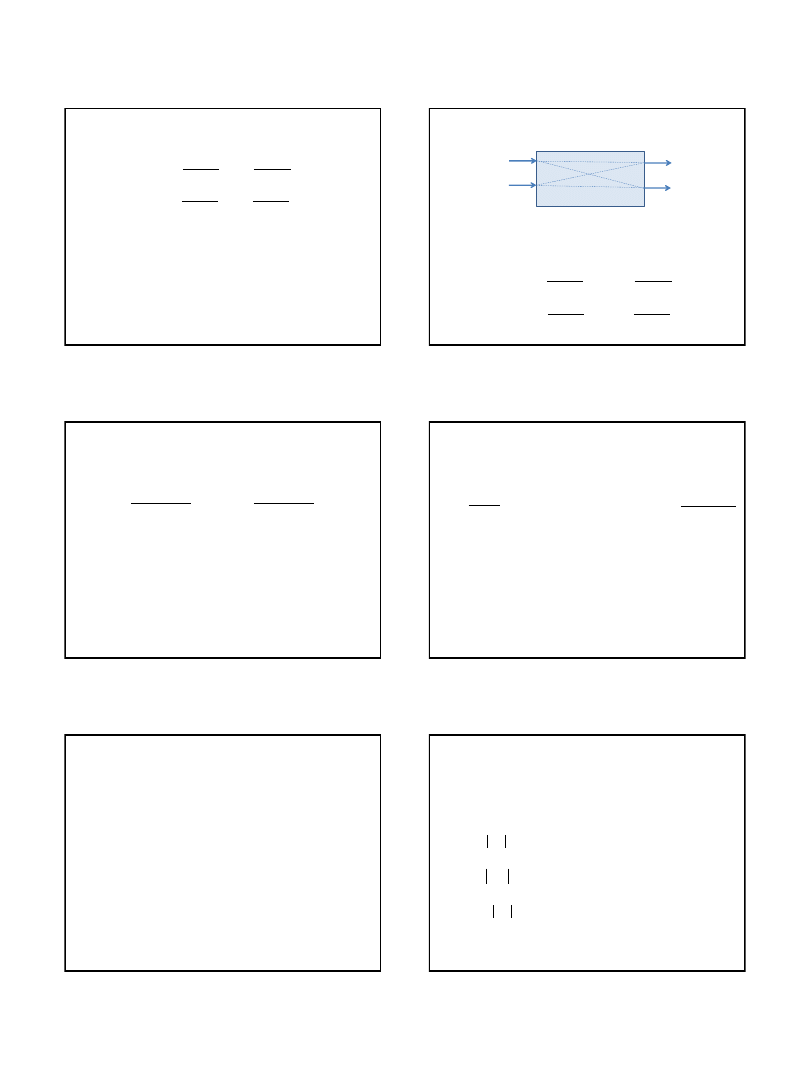
Dokładność dynamiczna
Dokładność dynamiczna może być oceniona na podstawie pola regulacji,
tzn. pola zawartego
pomiędzy krzywą uchybu regulacji a asymptotą, do
której ta krzywa dąży.
tdt
t
e
ITAE
dt
t
e
ISE
dt
t
e
IAE
0
0
2
0
)
(
)
(
)
(
The Integral of Absolute Error (IAE)
The Integral of Squared Error (ISE)
The Integral of Time multiply Absolute Error (ITAE)
2013-06-04
6
dt
t
t
e
ISTSE
dt
t
t
e
ISTAE
dt
t
t
e
ITSE
0
2
2
2
0
0
2
)
(
)
(
)
(
Dokładność dynamiczna
The Integral of Time Multiply Squared Error (ITSE)
The Integral of Tme Squared Multiply Asolute Error
The Integral of Tme Squared Multiply Squared Error
Jeśli uchyb nie dąży do zera należy użyć różnicy e(t) – e
ust.
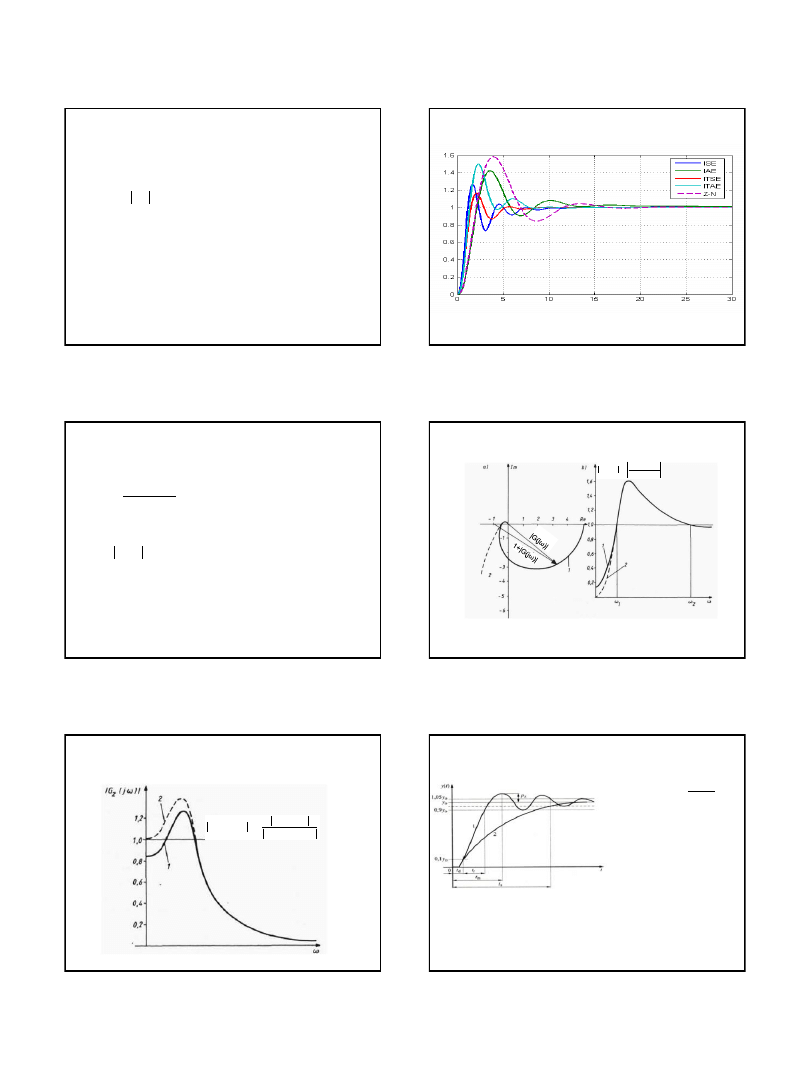
Dokładność dynamiczna
Dokładność przy wymuszeniach okresowych
Częstotliwościowy wskaźnik regulacji
t
j
q
A
t
e
t
A
t
u
j
q
j
G
j
G
otw
e
sin
)
(
)
(
sin
)
(
)
(
)
(
1
1
)
(
.
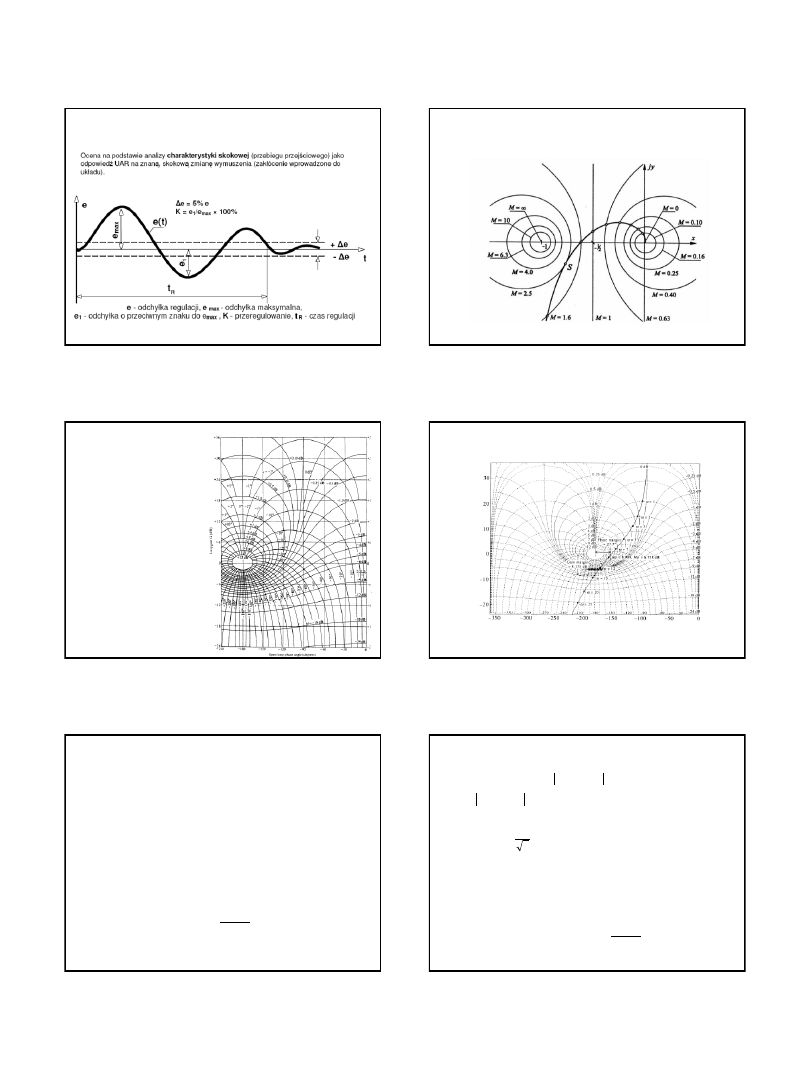
Pasmo regulacji (robocze)
1-
układ statyczny; 2- układ astatyczny
)
(
1
1
)
(
j
G
j
q
)
(
1
)
(
)
(
j
G
j
G
j
G
z
Charakterystyka modułu układu zamkniętego
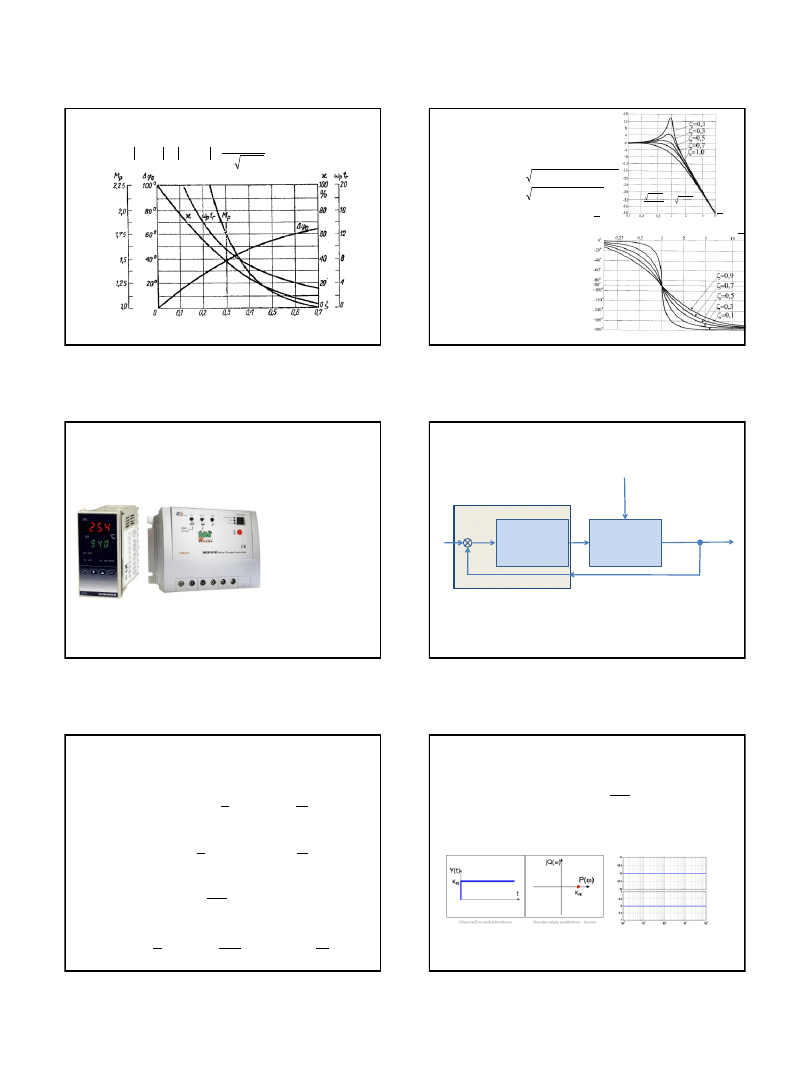
Wskaźniki cech odpowiedzi skokowej
• przeregulowanie:
• czas ustalania (regulacji), po
którym
uchyb
wielkości
regulowanej
mieści się w
granicach
±5% lub ±2%
• czas narastania, w którym
sygnał zmienia się od 0,1 do
0,9
wartości ustalonej
• czas opóźnienia , który upływa od chwili wystąpienia skoku na wejściu
do pojawienia
się odpowiedzi na wyjściu układu
• czas do wystąpienia maksimum pierwszego przeregulowania
%
100
.
.
max
ust
ust
y
y
y
2013-06-04
7
Wskaźniki cech odpowiedzi skokowej
Nomogram Halla
Karta Nicholsa
Karta Nicholsa
Pasmo przenoszenia układu zamkniętego
Pasmo przenoszenia to zakres
częstotliwości, w którym układ zamknięty
przenosi
sygnały zadające.
Pasmo przenoszenia
układu zamkniętego może być określone za
pomocą pulsacji rezonansowej ω
r
, pulsacji
odcięcia lub pulsacji
granicznej 3-decybelowej.
Istnieje
związek pomiędzy wskaźnikami odpowiedzi skokowej – czasem
regulacji i przeregulowaniem a
szerokością pasma przenoszenia i
modułem rezonansowym.
r
r
t
)
3
...
1
(
Moduł rezonansowy
707
,
0
2
1
)
(
3
)
(
)
(
)
(
max
)
(
lg
20
)
(
3
.
3
.
.
.
.
.
dB
zamk
dB
zmk
r
zamk
r
zamk
r
zamk
r
zmk
r
j
G
dB
Lm
j
G
M
Lm
j
G
Lm
Lm
Moduł rezonansowy stanowi bardziej precyzyjną miarę zapasu stabilności układu
niż zapas stabilności modułu i fazy.
Zazwyczaj wymaga się, aby były spełnione warunki:
%
100
1
4
1
5
,
1
1
,
1
r
r
r
r
M
M
dB
Lm
dB
M
2013-06-04
8
Zależność podstawowych parametrów URA od tłumienia względnego
2
1
2
)
(
)
(
max
k
j
G
j
G
M
r
r
Współczynnik tłumienia względnego
Człon oscylacyjny
9. Charakterystyki logarytmiczne
Charakterystyka logarytmiczna modułu
Charakterystyka logarytmiczna fazy
T
dla
T
k
Lm
T
T
k
Lm
T
T
k
Lm
1
)
lg(
20
lg
20
)
(
)
4
(
lg
20
lg
20
)
(
4
)
1
(
lg
20
lg
20
)
(
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
2
1
n
r
T
n
n
Regulatory liniowe
Układ Regulacji Automatycznej (URA)
W(s)
Y(s)
_
G
o
(s)
G
r
(s)
E(s)
U(s)
Z(s)
Y(s)
Regulator fizyczny
Liniowe prawa regulacji
1. Proporcjonalne prawo regulacji (P)
)
(
)
(
)
(
)
(
s
E
K
s
U
t
e
K
t
u
p
p
)
(
1
)
(
)
(
1
)
(
)
(
)
(
0
0
s
E
s
T
s
U
d
e
T
t
u
d
e
K
t
u
i
t
i
t
i
)
(
]
1
1
[
)
(
]
)
(
1
)
(
[
)
(
0
s
E
s
T
K
s
U
d
e
T
t
e
K
t
u
i
p
t
i
p
)
(
]
1
1
[
)
(
]
)
(
)
(
1
)
(
[
)
(
0
s
E
s
T
s
T
K
s
U
dt
t
de
T
d
e
T
t
e
K
t
u
d
i
p
t
d
i
p
)
(
]
1
[
)
(
]
)
(
)
(
[
)
(
s
E
s
T
K
s
U
dt
t
de
T
t
e
K
t
u
d
p
d
p
2.
Całkowe prawo regulacji (I)
3. Proporcjonalno-
całkowe prawo regulacji (PI)
5. Proporcjonalno-
całkowo-różniczkowe prawo regulacji (PID)
4.
Proporcjonalno-
różniczkowe prawo regulacji (PD)
Regulator proporcjonalny
p
P
p
p
K
s
E
s
U
s
G
s
E
K
s
U
t
e
K
t
u
)
(
)
(
)
(
)
(
)
(
)
(
)
(
1.,2.,3. Równanie w dziedzinie czasu i zmiennej zespolonej, transmitancja
6. Charakterystyka skokowa
7. Transmitancja widmowa
p
P
K
j
G
)
(
8. Charakterystyka amplitudowo-fazowa 9. Charakterystyki logarytmiczne
20lg K
p
Lm(
ω)
φ(ω)
2013-06-04
9
Działanie regulatora P
o
p
u
K
K
B
e
1
|
|
B
Czy można mówić o układzie zamkniętym bez regulatora?
Regulator całkujący
s
T
s
G
s
E
s
T
s
U
d
e
T
t
u
d
e
K
t
u
i
I
i
t
i
t
i
1
)
(
)
(
1
)
(
)
(
1
)
(
)
(
)
(
0
0
1.,2.,3. Równanie w dziedzinie czasu i zmiennej zespolonej, transmitancja
6. Charakterystyka skokowa 7. Transmitancja widmowa
i
i
I
T
j
jT
j
G
1
1
)
(
Lm(
ω)
φ(ω)
8. Charakterystyka amplitudowo-fazowa 9. Charakterystyki logarytmiczne
u(t)
Działanie regulatora I
Regulator proporcjonalno-całkujący (PI)
1.,2.,3. Równanie w dziedzinie czasu i zmiennej zespolonej, transmitancja
]
1
1
[
)
(
)
(
]
1
1
[
)
(
]
)
(
1
)
(
[
)
(
0
s
T
K
s
G
s
E
s
T
K
s
U
d
e
T
t
e
K
t
u
i
p
PI
i
p
t
i
p
4.Struktura
s
T
i
1
p
K
E(s)
U(s)
Regulator PI
6. Charakterystyka skokowa 7. Transmitancja widmowa
Regulator proporcjonalno-całkujący (PI)
i
p
p
PI
T
K
j
K
j
G
)
(
h(t)
Czas zdwojenia
8. Charakterystyka amplitudowo-fazowa
u(t)
K
p
K
p
K
p
9. Charakterystyki logarytmiczne
lg
20
1
lg
20
lg
20
)
(
2
)
1
(
)
(
)
(
)
(
1
)
(
)
(
)
(
2
2
2
2
T
T
K
Lm
T
arctg
T
arctg
P
Q
arctg
T
T
K
G
T
K
Q
K
P
i
p
i
i
i
p
PI
i
p
p
i
p
i
i
p
T
dla
K
T
dla
T
K
Lm
1
lg
20
1
lg
20
lg
20
)
(
Regulator proporcjonalno-całkujący (PI)
2013-06-04
10
Działanie regulatora PI
Działanie regulatora PI
Regulator
Regulator
Regulator proporcjonalno-różniczkowy (PD)
1.,2.,3. Równanie w dziedzinie czasu i zmiennej zespolonej, transmitancja
]
1
[
)
(
)
(
]
1
[
)
(
]
)
(
)
(
[
)
(
s
T
K
s
G
s
E
s
T
K
s
U
dt
t
de
T
t
e
K
t
u
d
p
PD
d
p
d
p
4.Struktura
s
T
d
p
K
E(s)
U(s)
Regulator PD
6. Charakterystyka skokowa 7. Transmitancja widmowa
Regulator proporcjonalno-różniczkowy (PD)
d
p
PD
jT
K
j
G
)
(
8. Charakterystyka amplitudowo-fazowa
K
p
P(
ω)
Q(
ω)
6a. Odpowiedź na skok prędkości
Czas wyprzedzenia
u(t)
e(t)
e(t)
)
(
)
(
)
(
1
)
(
2
d
d
p
PD
T
arctg
T
K
j
G
p
K
)
(
1
)]
(
1
[
)
(
t
t
T
K
t
h
d
p
PD
Regulator proporcjonalno-różniczkowy (PD)
9. Charakterystyki logarytmiczne
d
d
p
d
p
d
p
T
dla
T
K
T
dla
K
Lm
T
K
Lm
1
lg
20
lg
20
1
lg
20
)
(
)
(
1
lg
20
lg
20
)
(
2
Rzeczywisty regulator PD (PD
r
)
3.
Transmitancja operatorowa
]
1
1
[
)
(
s
T
s
T
K
s
G
r
d
p
PD
r
4.Struktura
1
s
T
s
T
r
d
p
K
E(s)
U(s)
Regulator PD
2013-06-04
11
6. Charakterystyka skokowa
Rzeczywisty regulator PD (PD
r
)
K
p
)
1
(
r
d
p
T
T
K
)
(
1
)
1
(
)
(
t
e
T
Td
K
t
h
r
r
T
t
r
p
PD
Rzeczywisty regulator PD (PD
r
)
7. Transmitancja widmowa
8. Charakterystyka amplitudowo-fazowa
)
1
1
(
)
(
r
d
p
PD
T
j
T
j
K
j
G
r
)
(
1
)
(
1
)
(
1
)
(
1
)
(
)
1
1
(
)
(
2
2
2
2
2
2
2
2
2
2
r
d
r
d
PD
r
r
d
p
PD
r
d
p
PD
r
r
d
p
PD
T
T
T
T
arctg
T
T
T
K
j
G
T
T
K
Q
T
T
T
K
P
r
r
r
r
{G(j
ω)}
Re{G(j
ω)}
φ
max
)
(
1
r
d
r
T
T
T
Rzeczywisty regulator PD (PD
r
)
r
r
r
d
p
r
r
d
r
d
p
r
d
p
r
r
d
p
T
dla
T
T
T
K
T
T
T
dla
T
T
K
T
T
dla
K
Lm
T
T
T
K
Lm
1
lg
20
1
1
lg
20
)
(
lg
20
1
lg
20
)
(
1
lg
20
)
(
1
lg
20
lg
20
)
(
2
2
2
2
9. Charakterystyki logarytmiczne
Działanie regulatora PD
r
o
p
u
K
K
B
e
1
|
|
B
r
d
T
T
1
r
T
1
Regulator
Regulator
Regulator
r
T
1
Regulator
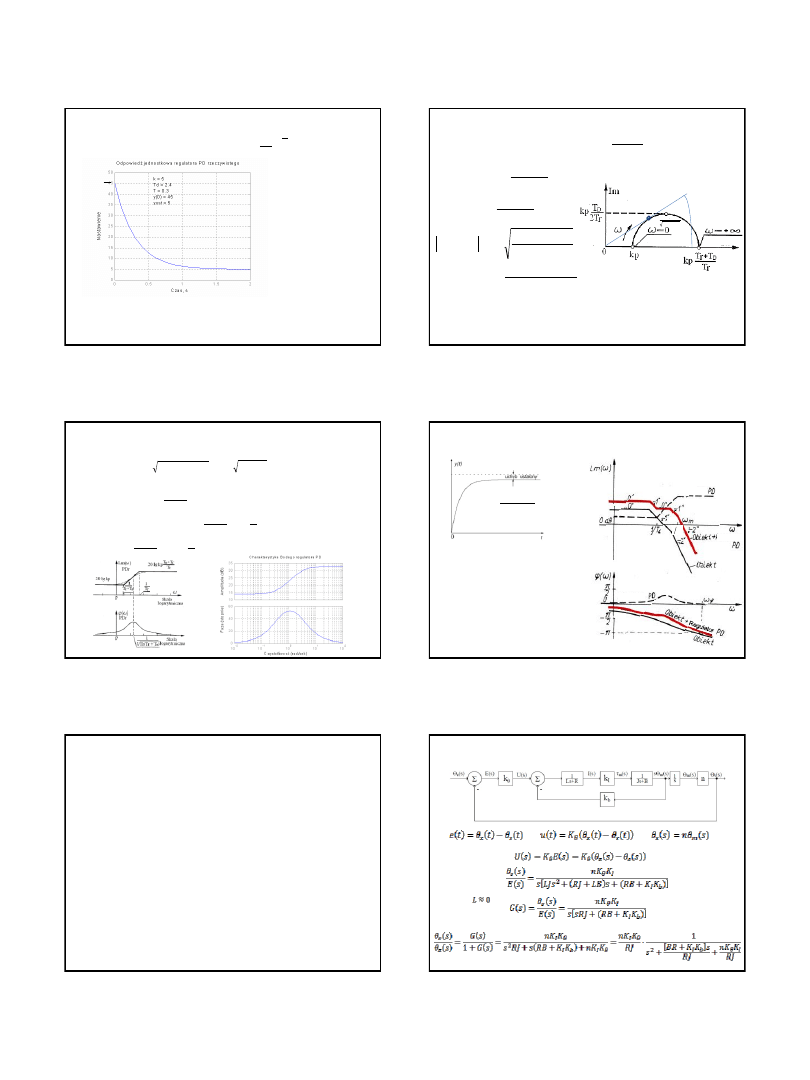
Serwomechanizm
Serwomechanizm ma
strukturę typowego układu regulacji, nie steruje jednak
obiektem technologicznym, lecz
siłownikiem w celu usprawnienia działania toru
wykonawczego.
Sygnałem wyjściowym jest pewna mechaniczna wielkość taka jak położenie,
prędkość czy przyspieszenie. Często jest to po prostu przesunięcie – mówimy wtedy
o serwomechanizmie
położeniowym.
Model pojedynczego węzła manipulatora
2013-06-04
12
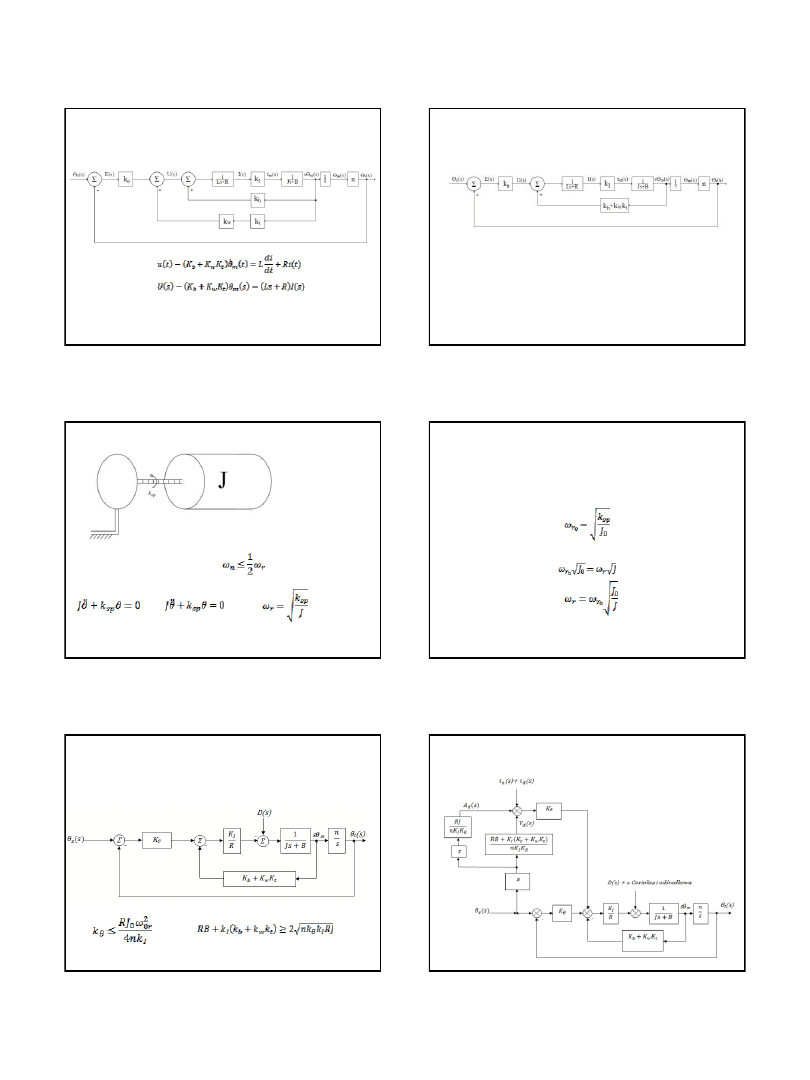
Model pojedynczego węzła manipulatora
Model pojedynczego węzła manipulatora
Aby zapobiec pobudzaniu drgań konstrukcji mechanicznej
manipulatora należy zadbać, aby pulsacja drgań własnych
układu regulacji nie była bliska pulsacji rezonansowej
manipulatora, tzn.:
Pulsacje rezonansową można oszacować z następujących zależności:
, skąd:
Rezonans konstrukcji mechanicznej
Pulsacja rezonansowa zależy od momentu bezwładności, który będzie się
zmieniał, np. w związku ze zmianą przenoszonego ładunku.
Jeśli jednak wyznaczymy ją dla momentu bezwładnościJ
0
To dla innego momentu bezwładności J będzie ona mogła być również
wyznaczona:
Rezonans konstrukcji mechanicznej
Układ sterowania pojedynczego węzła robota
Kompensacja uchybu położeniowego,
prędkościowego i przyspieszeniowego
2013-06-04
13
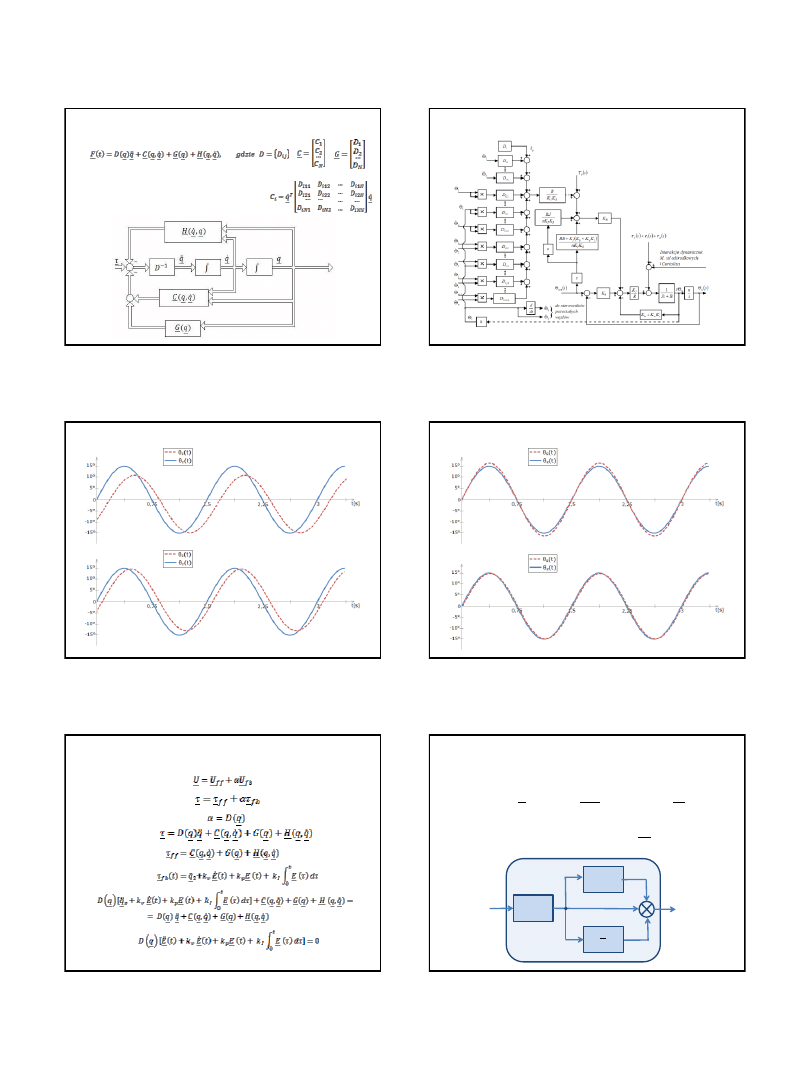
Model dynamiki manipulatora
Układ sterowania z obliczanym momentem
Bez kompensacji
Kompensacja grawitacji
Efekty kompensacji
Kompensacja grawitacji i tarcia
Kompensacja grawitacji, tarcia i inercji
Efekty kompensacji
Sterowanie z rozdzielonym prawem sterowania
Regulator proporcjonalno-całkowo-rożniczkowy (PID)
1.,2. Równanie w dziedzinie czasu i zmiennej zespolonej
3.
Transmitancja operatorowa
]
1
1
[
)
(
s
T
s
T
K
s
G
d
i
p
PID
4.Struktura
)
(
)
1
1
(
)
(
]
)
(
)
(
1
)
(
[
)
(
0
s
E
s
T
s
T
K
s
U
dt
t
de
T
d
e
T
t
e
K
t
u
d
i
p
t
d
i
p
p
K
E(s)
U(s)
Regulator PID
s
T
d
s
T
i
1
2013-06-04
14
Regulator proporcjonalno-całkowo-rożniczkowy (PID)
6. Charakterystyka skokowa
)]
(
1
[
)
(
t
T
T
t
K
t
h
d
i
p
PID
7. Transmitancja widmowa
0
1
1
)
1
(
)
(
)
1
(
1
)
(
1
)
(
)
(
)]
1
(
1
[
]
1
1
[
)
(
2
i
d
i
d
i
d
i
d
p
PID
i
d
p
i
d
p
d
i
p
PID
T
T
T
T
Dla
T
T
arctg
T
T
K
j
G
T
T
Q
K
P
T
T
j
K
T
j
T
j
K
j
G
8. Charakterystyka amplitudowo-fazowa
K
p
P(
ω)
Q(
ω)
ω
↓
0
∞
↑
ω
i
d
T
T
1
Regulator proporcjonalno-całkowo-rożniczkowy (PID)
9. Charakterystyki logarytmiczne
d
d
p
d
i
p
i
i
p
PID
i
d
p
PID
i
d
p
PID
T
dla
T
K
T
T
dla
K
T
dla
T
K
Lm
T
T
K
Lm
T
T
K
j
G
1
lg
20
lg
20
lg
20
1
1
lg
20
1
lg
20
lg
20
lg
20
)
(
)
1
(
1
lg
20
lg
20
)
(
)
1
(
1
)
(
2
2
d
T
1
i
T
1
Rzeczywisty regulator PID (PID
r
)
]
1
1
1
[
)
(
s
T
s
T
s
T
K
s
G
r
d
i
p
PID
r
4.Struktura
3. Transmitancja operatorowa
p
K
E(s)
U(s)
Regulator PID
r
1
s
T
s
T
r
d
s
T
i
1
Parametry nastawialne:
o K
p
- wzmocnienie
o T
i
- czas zdwojenia
o T
d
- czas wyprzedzenia
T
r
– stała czasowa - nie podlega nastawianiu
p
K
Rzeczywisty regulator PID (PID
r
)
6. Odpowiedź skokowa
)
(
1
)
1
(
)
(
t
e
T
T
T
t
K
t
h
r
r
T
t
r
d
i
p
PID
Rzeczywisty regulator PID (PID
r
)
7. Transmitancja widmowa
)]
1
1
(
1
1
[
)
1
1
1
(
)
(
2
2
2
2
2
i
r
d
r
r
d
p
r
d
i
p
PID
T
T
T
j
T
T
T
K
T
j
T
j
T
j
K
j
G
r
i
r
d
r
r
d
i
i
r
d
r
r
d
p
PID
i
r
d
p
PID
r
r
d
p
PID
T
T
T
T
T
T
T
arctg
w
T
T
T
T
T
T
K
j
G
T
T
T
K
Q
T
T
T
K
P
r
r
r
)
(
1
1
)
(
)
(
)
1
1
(
)
1
1
(
)
(
)
1
1
(
)
(
)
1
1
(
)
(
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
8. Charakterystyka amplitudowo-fazowa
Rzeczywisty regulator PID (PID
r
)
2013-06-04
15
9. Charakterystyki logarytmiczne
Rzeczywisty regulator PID (PID
r
)
2
2
2
2
2
2
2
2
2
2
2
2
2
2
)
1
1
(
)
1
1
(
lg
20
lg
20
)
(
)
1
1
(
)
1
1
(
)
(
i
r
d
r
r
d
p
PID
i
r
d
r
r
d
p
PID
T
T
T
T
T
T
K
Lm
T
T
T
T
T
T
K
j
G
r
r
r
r
d
p
r
d
d
p
d
i
p
i
p
PID
T
dla
T
T
K
T
T
dla
T
K
T
T
dla
K
T
dla
K
Lm
r
1
),
1
(
lg
20
1
1
,
lg
20
lg
20
1
1
,
lg
20
1
,
lg
20
lg
20
)
(
Działanie regulatora PID
r
r
T
1
Zakres proporcjonalności
S
y
g
n
ał
w
y
jśc
io
w
y
r
eg
u
lat
o
ra
%
Nasycenie
Uchyb %
Nasycenie
K
p2
<K
p1
K
p1
Zakres
proporcjo
nalności
p
p
K
X
%
100
Minimalna, procentowa, w stosunku do
pełnego zakresu,
zmiana uchybu, potrzebna do
wywołania pełnej (100%)
zmiany
sygnału wyjściowego regulatora.
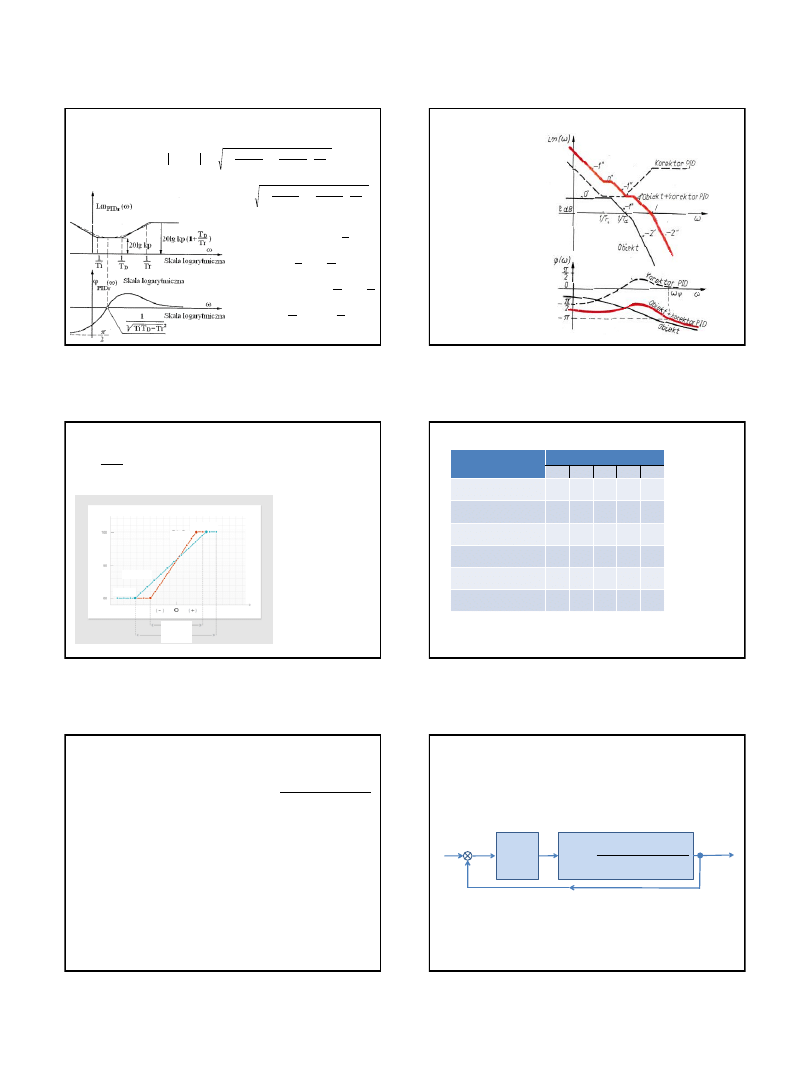
Obiekt
Regulator
P
I
PI
PD
PID
P
proporcjonalny
-
+
+
-
-
PT1
inercyjny I. rzędu
+
+
+
+
+
PT2
inercyjny II. rzędu
+
-
+
-
+
I
całkujący
+
-
+
-
-
IT1
całkujący z inercją
+
-
+
+
+
I2
podwójnie całkujący
-
-
-
+
+
Dobór regulatora do obiektu
+: dobór właściwy
-
: dobór niewłaściwy
Przykład
Dany jest obiekt o transmitancji operatorowej:
)
1
)(
1
)(
1
(
)
(
3
2
1
.
s
T
s
T
s
T
K
s
G
o
ob
s
T
s
T
s
T
K
o
2
,
0
125
,
0
05
,
0
100
3
2
1
Zaprojektować URA spełniający następujące kryteria jakości sterowania:
s
t
e
r
ust
4
,
0
%
20
%
2
.
wartości zadanej
przy strefie błędu
%
5
e
W(s)
Y(s)
_
G
r
(s)=?
E(s)
U(s)
Y(s)
)
1
)(
1
)(
1
(
)
(
3
2
1
.
s
T
s
T
s
T
K
s
G
o
ob
Przykład
2013-06-04
16
Charakterystyki częstotliwościowe obiektu regulacji
2dB
Dobór regulatora i jego nastaw regulatora
dB
Lm
M
M
M
M
M
r
r
r
r
r
r
9
,
1
25
,
1
8
,
0
1
1
2
,
0
%
100
1
0335
,
0
max
p
K
Przykład
Regulator P
W(s)
Y(s)
_
G
r
(s)=K
p
E(s)
U(s)
Y(s)
)
1
2
,
0
)(
1
125
,
0
)(
1
05
,
0
(
100
)
(
1
.
s
s
s
s
G
ob
0335
,
0
max
p
K
2%
23%
0,229
35
,
3
1
1
0335
,
0
100
)
1
2
,
0
)(
1
125
,
0
)(
1
05
,
0
(
)
1
2
,
0
)(
1
125
,
0
)(
1
05
,
0
(
lim
)
(
)
(
)
(
lim
)
(
lim
1
)
(
lim
)
(
lim
)
1
)(
1
)(
1
)
(
)
(
)
(
1
1
0
.
.
.
0
0
0
0
.
3
2
1
.
.
s
s
s
s
s
s
s
L
s
M
s
M
s
G
s
s
sG
s
sE
e
s
T
s
T
s
T
K
K
s
G
s
G
s
G
s
otw
otw
otw
s
e
s
e
s
s
ust
o
p
ob
r
otw
Regulator PI
Przykład
2dB
Nastawy:
s
T
K
i
p
24
,
0
134
,
0
Przykład
Odpowiedź skokowa układu z regulatorem PI
W(s)
Y(s)
_
E(s)
U(s)
Y(s)
)
1
2
,
0
)(
1
125
,
0
)(
1
05
,
0
(
100
)
(
1
.
s
s
s
s
G
ob
s
T
K
i
p
24
,
0
134
,
0
)
1
1
(
s
T
K
i
p
%
2
0
%
20
4
,
0
.
ust
r
e
s
t
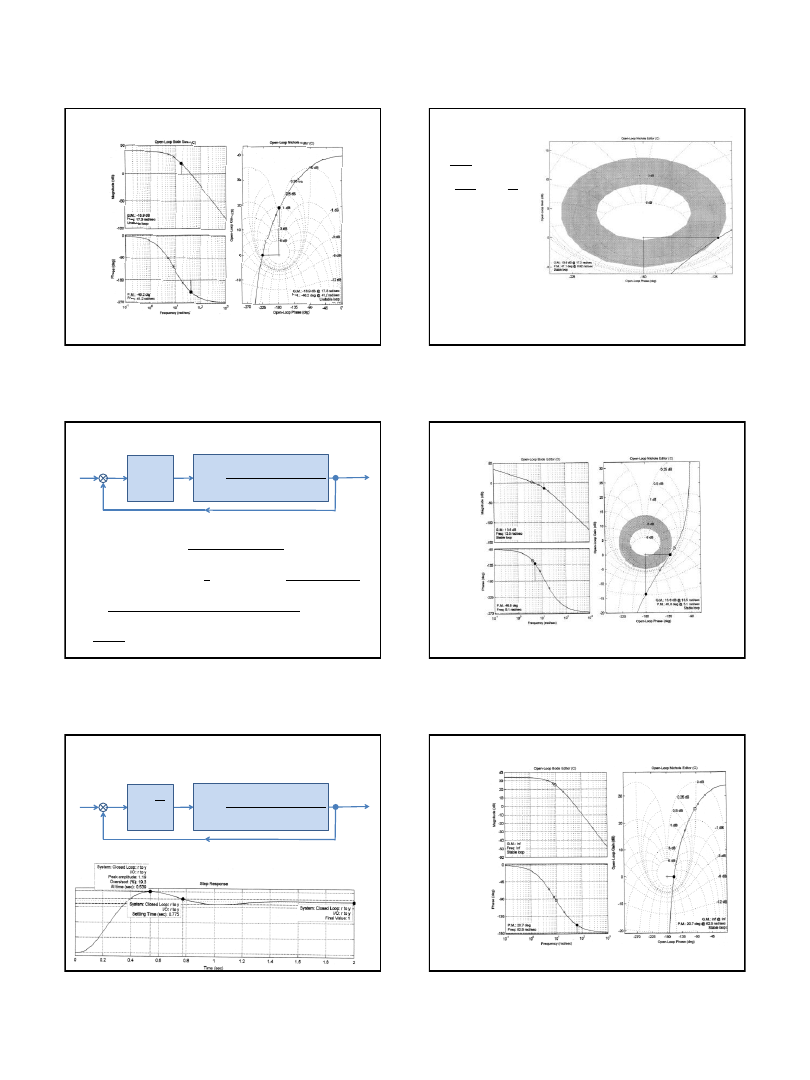
Przykład
URA z regulatorem PD
Nastawy:
s
T
K
d
p
1
,
0
5
,
0
2013-06-04
17
W(s)
Y(s)
_
E(s)
U(s)
Y(s)
)
1
2
,
0
)(
1
125
,
0
)(
1
05
,
0
(
100
)
(
1
.
s
s
s
s
G
ob
s
T
K
d
p
1
,
0
5
,
0
)
1
(
s
T
K
d
p
Przykład
URA z regulatorem PD
%
2
%
20
4
,
0
.
ust
r
e
s
t
Przykład
URA z regulatorem PID
Nastawy:
s
T
s
T
K
d
i
p
086
,
0
35
,
0
087
,
0
W(s)
Y(s)
_
E(s)
U(s)
Y(s)
)
1
2
,
0
)(
1
125
,
0
)(
1
05
,
0
(
100
1
s
s
s
s
T
s
T
K
i
d
p
35
,
0
086
,
0
087
,
0
)
1
1
(
s
T
s
T
K
i
d
p
Przykład
URA z regulatorem PID
%
2
0
%
20
4
,
0
.
ust
r
e
s
t
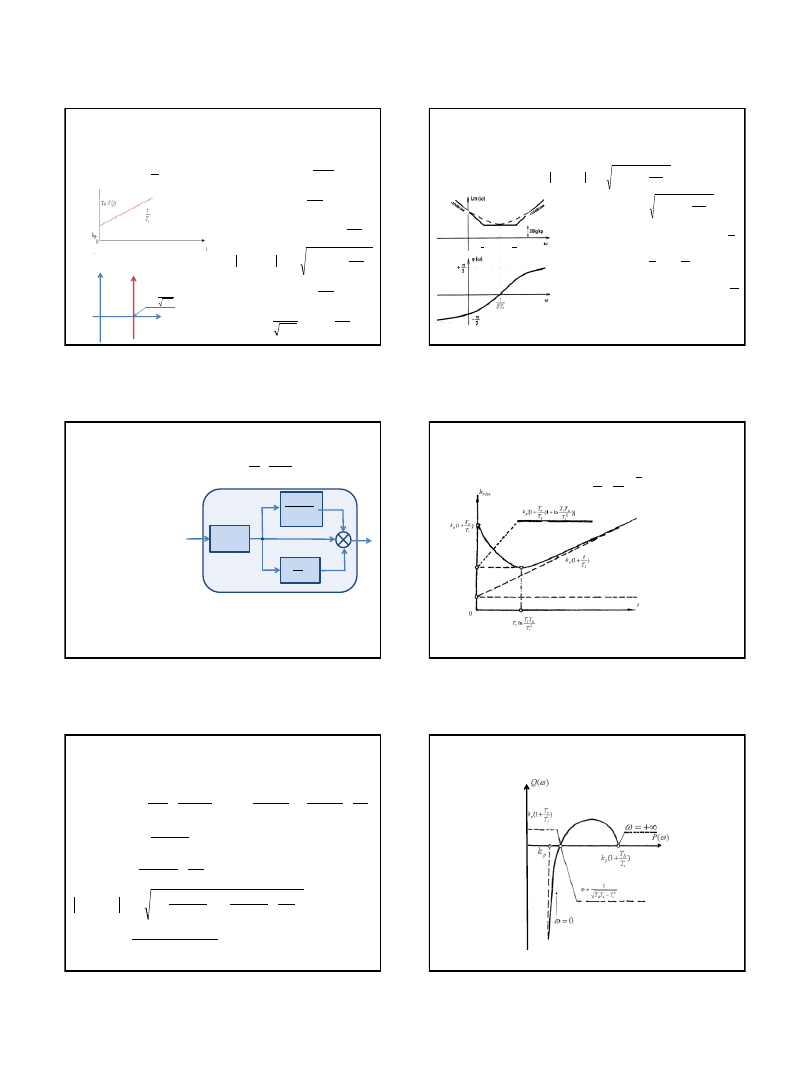
Metoda Zieglera-Nicholsa strojenia regulatora (1942)
Daje przebiegi
przejściowe z przeregulowaniem ok. 20% i minimalnym
czasie regulacji.
Algorytm metody:
1.
Nastawić regulator na działanie tylko proporcjonalne, tzn. T
i
=∞; T
d
=0.
2.
Zwiększać wzmocnienie K
p
,
aż do wystąpienia oscylacji niegasnacych
w
układzie (granica stabilności).
John Ziegler
Metoda Zieglera-Nicholsa doboru nastaw regulatora
3.
Zarejestrować i zmierzyć okres oscylacji T
osc.
a na skali regulatora
odczytać wzmocnienie krytyczne, K
pkr
, przy
którym one wystąpiły.
4. Przy dopuszczalnym przeregulowaniu i
zależnie od typu regulatora
należy przyjąć nastawy:
Dla regulatora P:
K
p
=0,5K
pkr
Dla regulatora PI: K
p
=0,45K
pkr
T
i
=0,85T
osc.
Dla regulatora PID: K
p
=0,6K
pkr
T
i
=0,5T
osc.
T
d
=0,12T
osc
5.
Jeśli przeregulowanie nie jest dopuszczalne, zależnie od typu
regulatora
należy przyjąć nastawy (modyfikacja Pessena):
Dla regulatora P:
K
p
=0,2K
pkr
Dla regulatora PI: K
p
=0,15K
pkr
T
i
=0,4T
osc.
Dla regulatora PID: K
p
=0,25K
pkr
T
i
=0,33T
osc.
T
d
=0,5T
osc
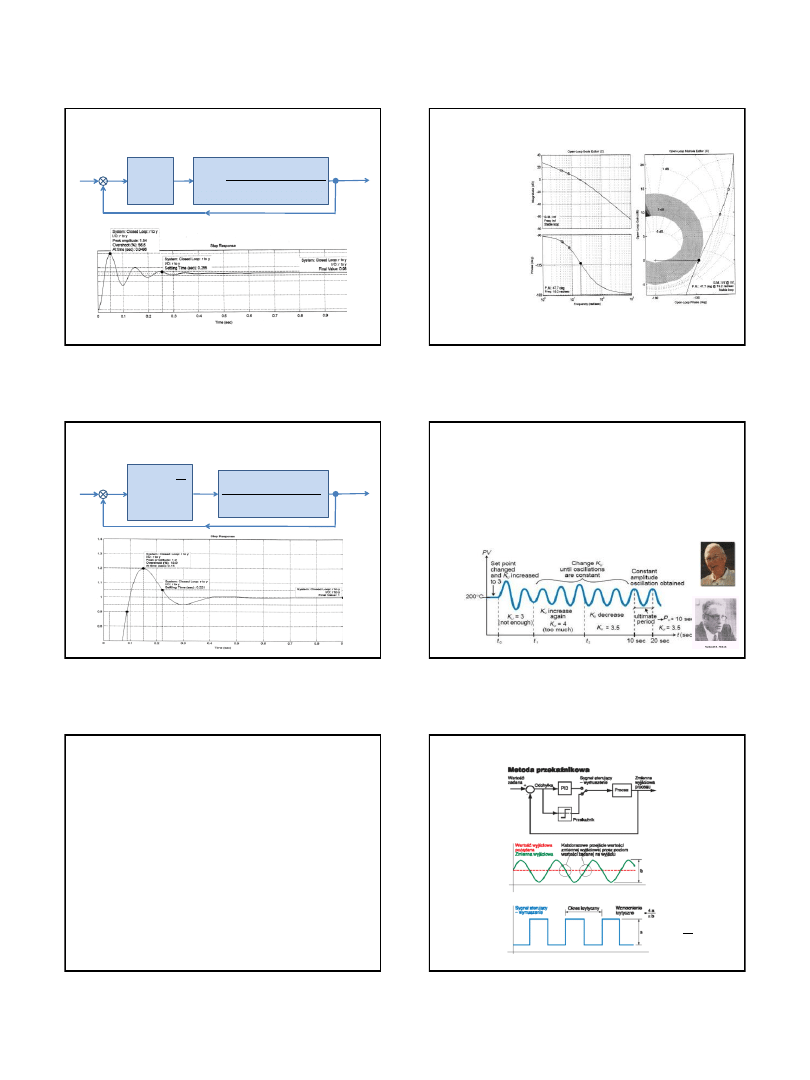
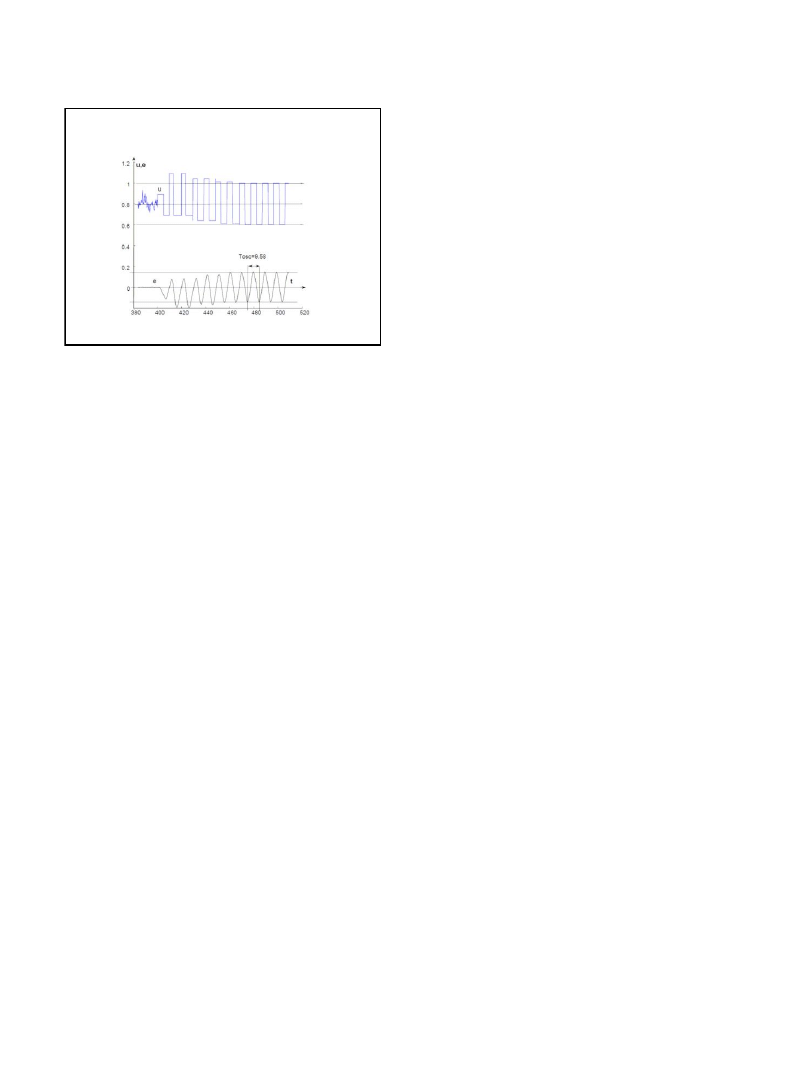
Samostrojenie regulatora (plug&play)
.
4
osc
kr
pkr
T
T
b
a
K
2013-06-04
18
Samostrojenie regulatora – metoda przekaźnikowa
Wyszukiwarka
Podobne podstrony:
1AiR dla FT
2AiR dla FT
3AiR dla FT id 36589 Nieznany
1AiR dla FT
FT cykl 07 8 dla I II III roku
gruźlica dla studentów2
Prezentacja 2 analiza akcji zadania dla studentow
1Ochr srod Wyklad 1 BIOLOGIA dla studid 19101 ppt
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
higiena dla studentów 2011 dr I Kosinska
Parametry życiowe dla WCEM
PREZENTacja dla as
Wyklad FP II dla studenta
badanie dla potrzeb fizjoterapii
więcej podobnych podstron