Rozdział 3
Rozdział 3
Obliczanie płyt krzyżowo-
Obliczanie płyt krzyżowo-
zbrojonych
według
teorii
zbrojonych
według
teorii
sprężystości
i
nośności
sprężystości
i
nośności
granicznej
granicznej
W płytach prostokątnych, których długości boków znacznie się różnią przyjmuje
W płytach prostokątnych, których długości boków znacznie się różnią przyjmuje
się, że pracują one tylko w jednym kierunku (tzn. wzdłuż mniejszej rozpiętości). Na
się, że pracują one tylko w jednym kierunku (tzn. wzdłuż mniejszej rozpiętości). Na
podstawie doświadczeń ustalono, że w płytach prostokątnych opartych na całym
podstawie doświadczeń ustalono, że w płytach prostokątnych opartych na całym
obwodzie należy uwzględnić dwukierunkowe zginanie, gdy stosunek długości
obwodzie należy uwzględnić dwukierunkowe zginanie, gdy stosunek długości
boków płyty
boków płyty
l
l
x
x
i
i
l
l
y
y
zawiera się w granicach
zawiera się w granicach
0.5
2.0
y
x
l
l
Ł
Ł
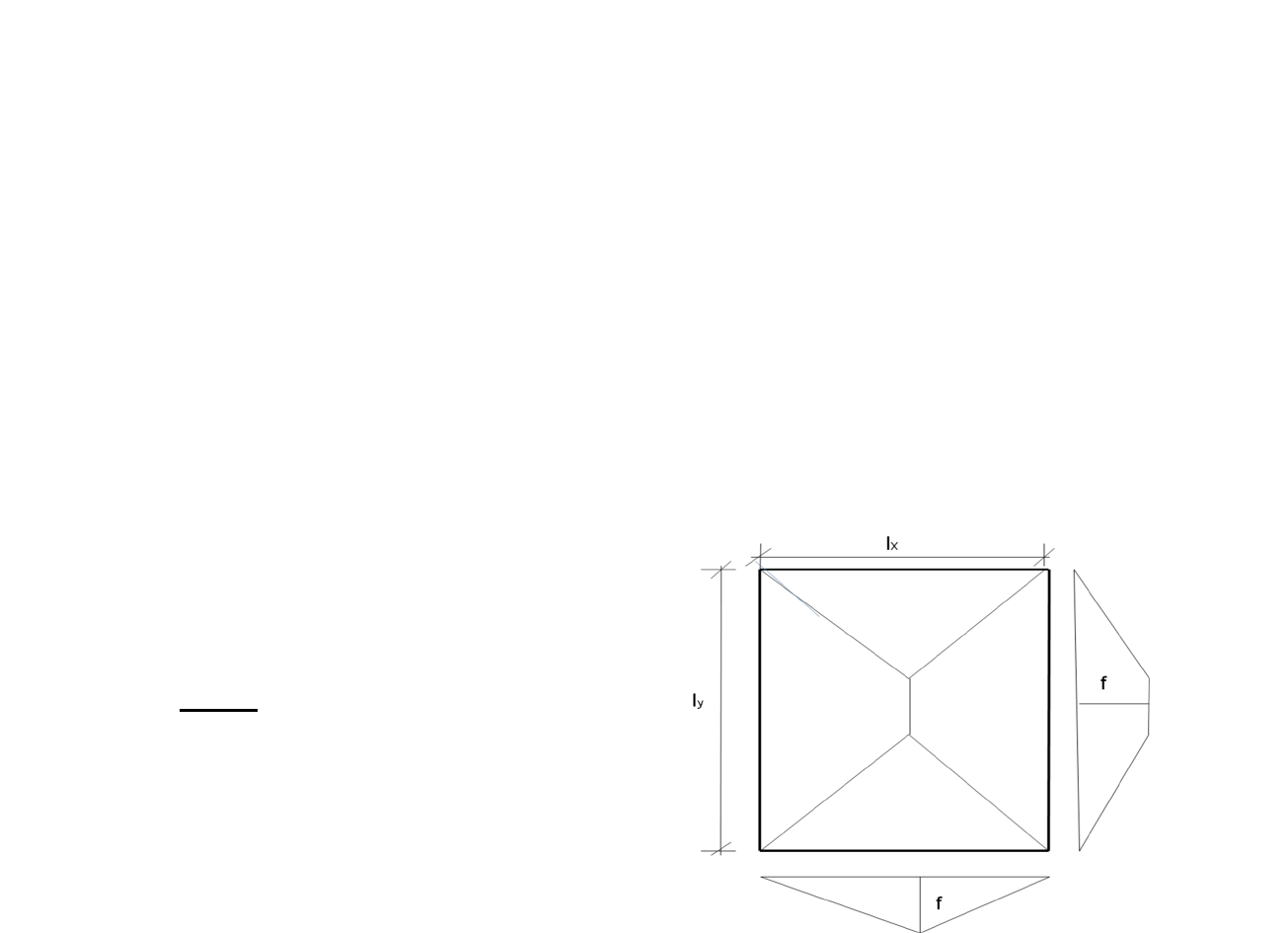
Płyty oblicza się według teorii sprężystości lub teorii nośności granicznej.
Rys.3.1:
Płyty pracujące dwukierunkowo
Płyty pracujące dwukierunkowo
Obliczanie płyt według teorii
Obliczanie płyt według teorii
sprężystości
sprężystości
Zakłada się, że:
Zakłada się, że:
- grubość jest niewielka w porównaniu z pozostałymi wymiarami,
- grubość jest niewielka w porównaniu z pozostałymi wymiarami,
- punkty leżące na normalnej do powierzchni również po odkształceniu
- punkty leżące na normalnej do powierzchni również po odkształceniu
pozostają na normalnej do odkształconej powierzchni,
pozostają na normalnej do odkształconej powierzchni,
- ugięcia są małe w porównaniu z grubością płyty,
- ugięcia są małe w porównaniu z grubością płyty,
- pomija się wydłużenia i odkształcenia kątowe w płaszczyźnie środkowej.
- pomija się wydłużenia i odkształcenia kątowe w płaszczyźnie środkowej.
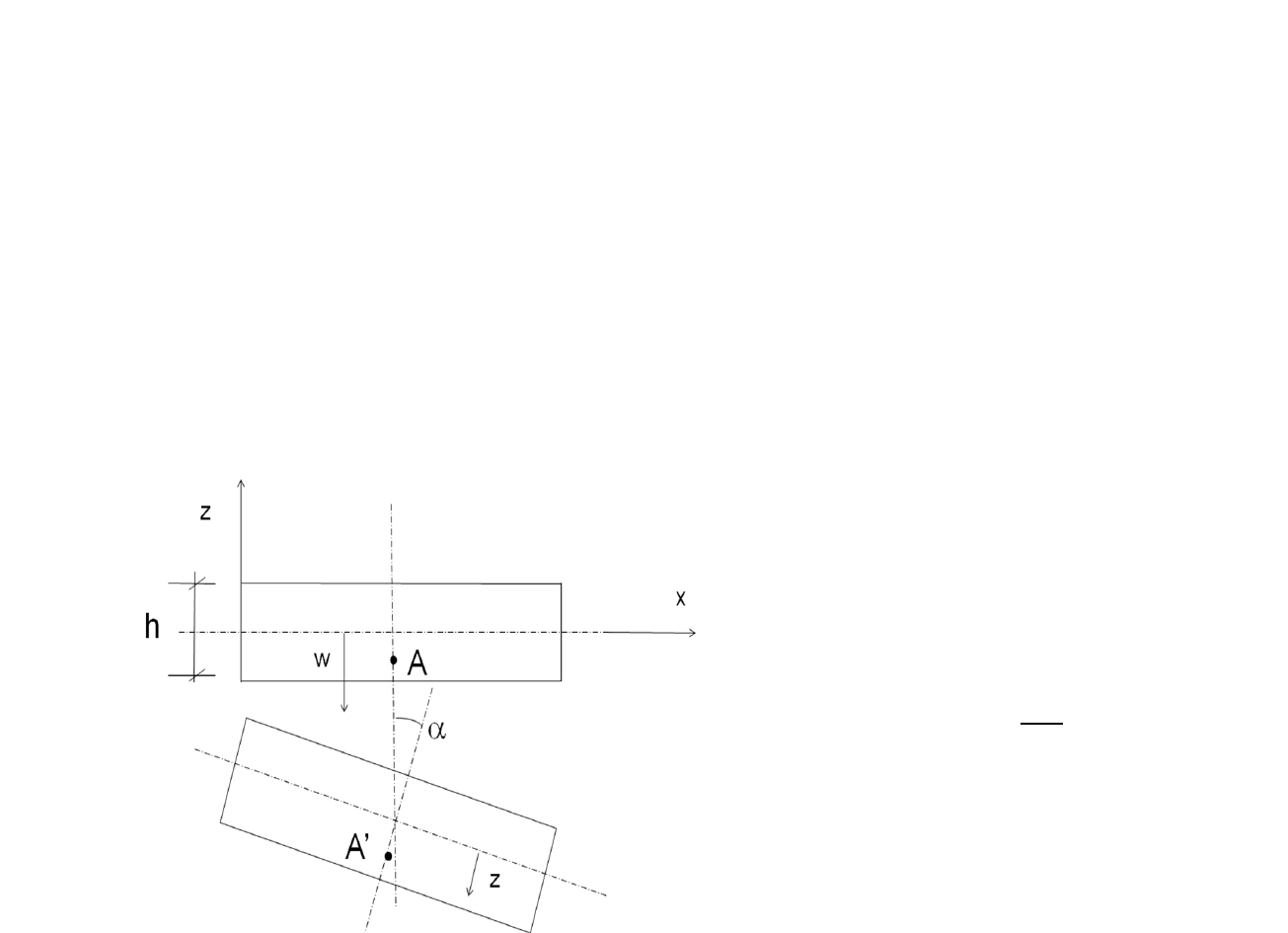
Przemieszczenie płyty
Przemieszczenie płyty
w płaszczyźnie
w płaszczyźnie
zy
zy
w
x
α
∂
=
∂
Wzory na przemieszczenia są następujące
Wzory na przemieszczenia są następujące
:
:
w
u
tg
z
z
x
α
∂
= −
• =
•
∂
w
v
tg
z
z
y
β
∂
= −
• =
•
∂
w w
=
Równanie płyty
Równanie płyty
:
:
4
4
4
2
4
2
2
4
3
2
12(1
)
w
w
w
q
x
x y
y
Eh
ν
∂
∂
∂
−
+
+
=
∂
∂ ∂
∂
h
h
- grubość płyty,
- grubość płyty,
E
E
- moduł sprężystości,
- moduł sprężystości,
q
q
- obciążenie ciągłe,
- obciążenie ciągłe,
ν
ν
- współczynnik Poissona
- współczynnik Poissona
Jeżeli znana jest funkcja
Jeżeli znana jest funkcja
w (x,y
w (x,y
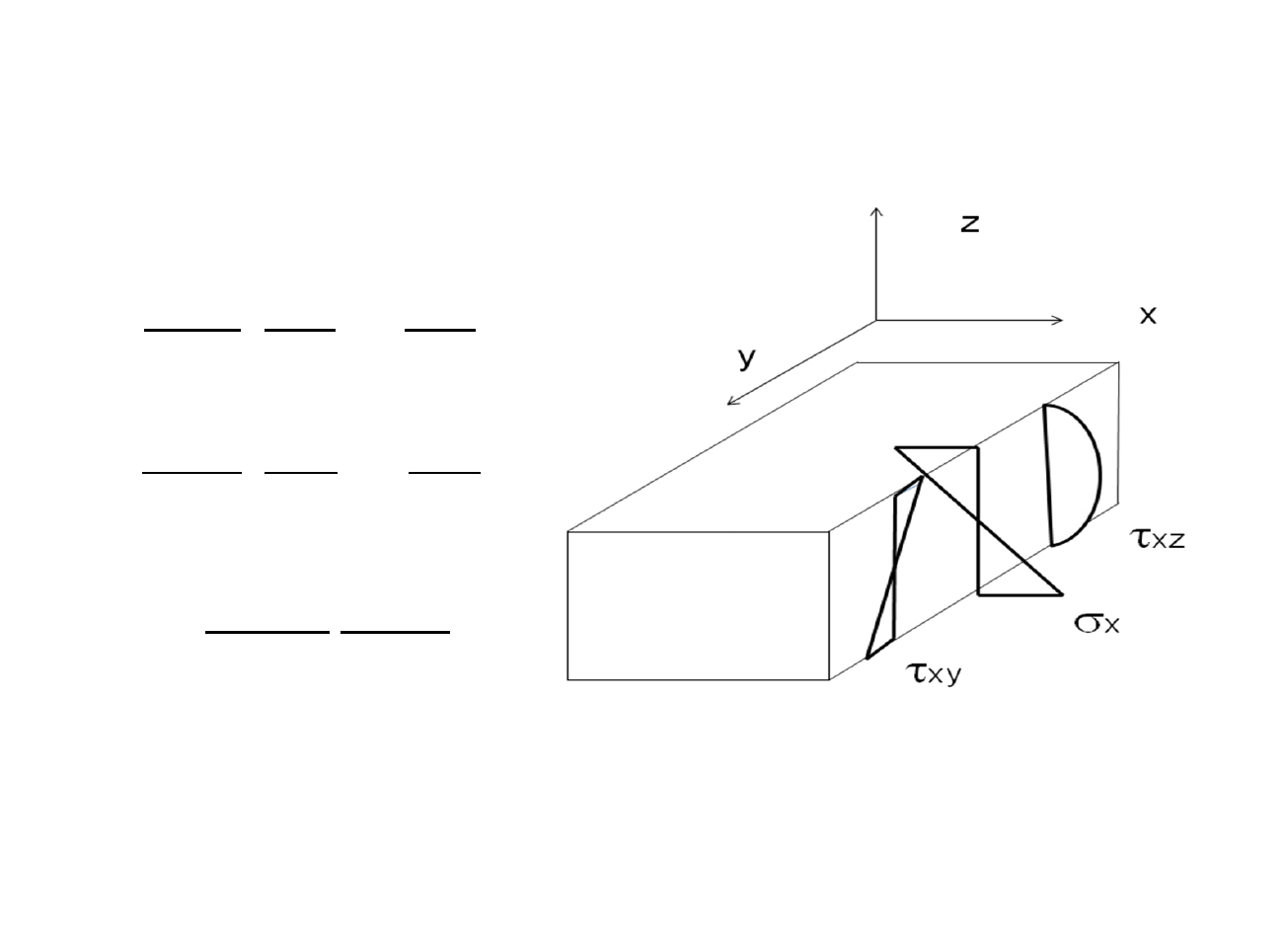
), to naprężenia normalne i styczne są
), to naprężenia normalne i styczne są
równe
równe
2
2
2
2
2
(
)
1
x
Ez
w
w
x
y
σ
ν
ν
∂
∂
=
+
−
∂
∂
2
2
2
2
2
(
)
1
y
Ez
w
w
y
x
σ
ν
ν
∂
∂
=
+
−
∂
∂
2
1
xy
Ez
w
x y
τ
ν
∂
= −
+
∂ ∂
Rys.3.2: Naprężenia na jednym boku
płyty pracującej dwukierunkowo
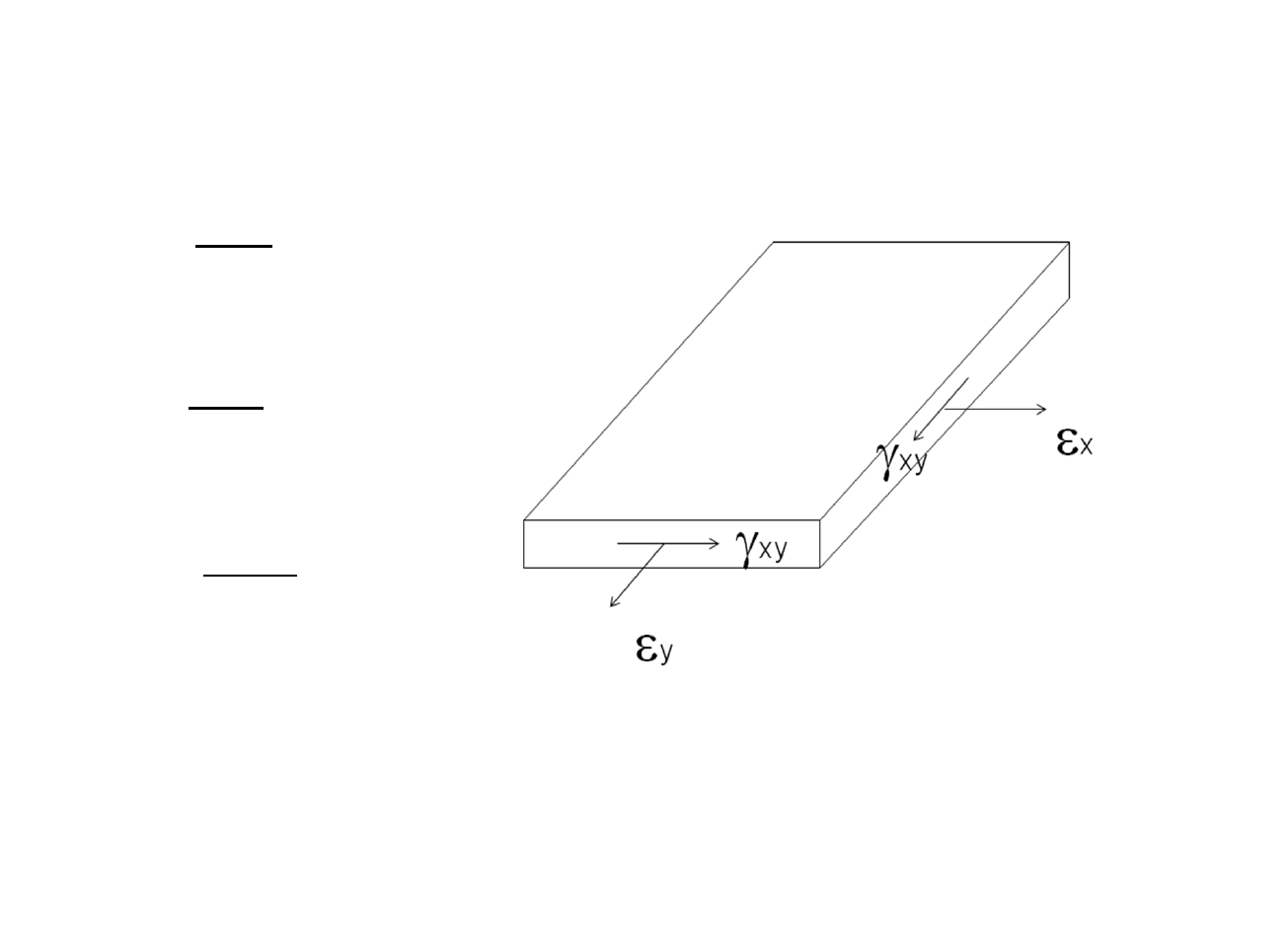
Odkształcenia normalne i styczne są równe (Rys.3.3)
Odkształcenia normalne i styczne są równe (Rys.3.3)
2
2
x
w
z
x
ε
∂
= −
∂
2
2
y
w
z
y
ε
∂
= −
∂
2
xy
w
z
x y
γ
∂
= −
∂ ∂
Rys.3.3: Odkształcenia normalne i
styczne boku na bokach płyty
pracującej dwukierunkowo
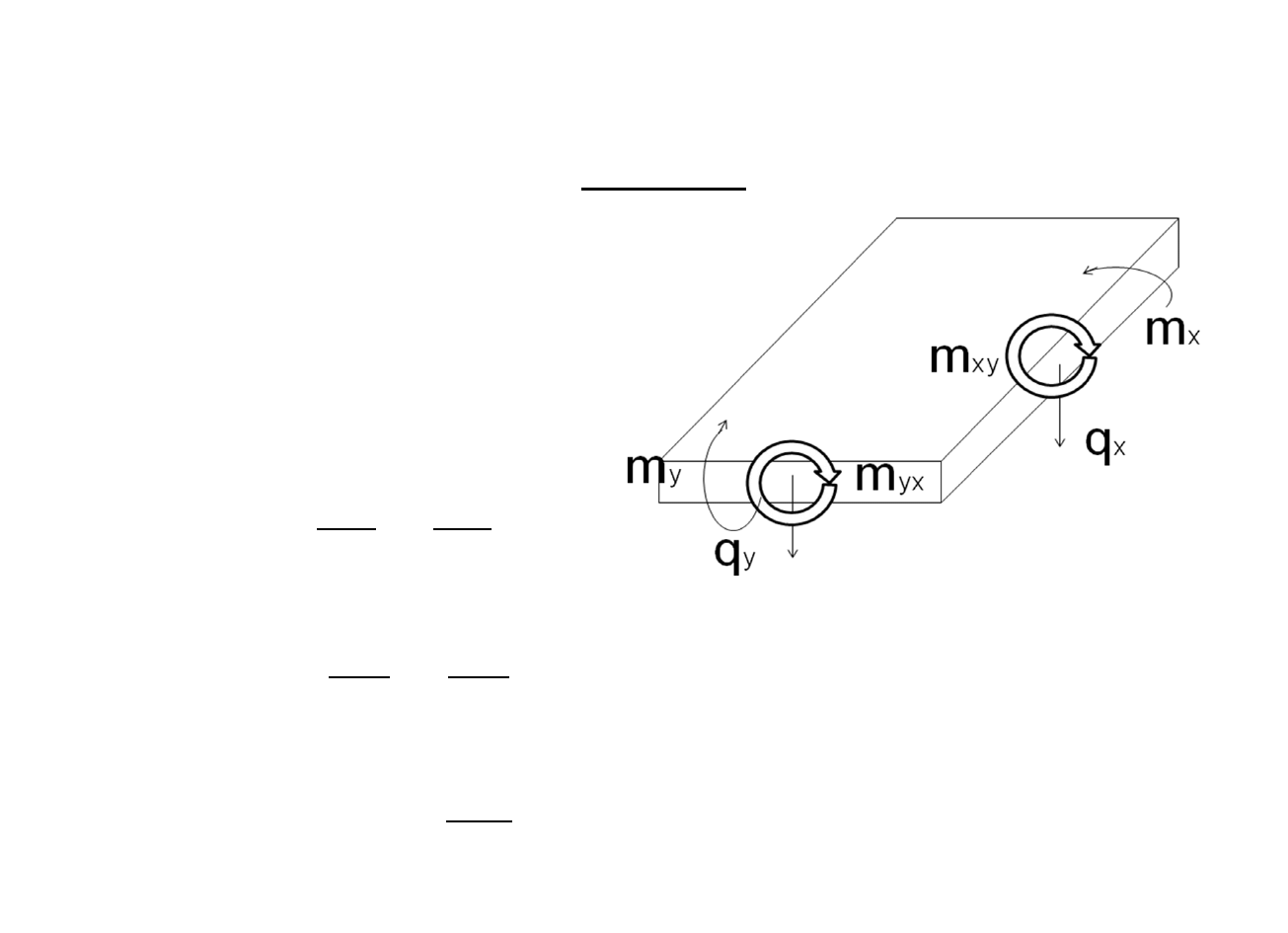
Siły tnące i momenty oblicza się ze wzorów
Siły tnące i momenty oblicza się ze wzorów
( )
( )
3
2
12(1
)
Eh
K
ν
=
−
/ 2
/ 2
h
x
xz
h
q
dz
τ
−
=
ň
/ 2
/ 2
h
y
yz
h
q
dz
τ
−
=
ň
/ 2
2
2
2
2
/ 2
(
)
h
x
x
h
w
w
m
zdz
K
x
y
σ
ν
−
∂
∂
=
= −
+
∂
∂
ň
/ 2
2
2
2
2
/ 2
(
)
h
y
y
h
w
w
m
zdz
K
y
x
σ
ν
−
∂
∂
=
= −
+
∂
∂
ň
/ 2
2
/ 2
(1
)
h
xy
yx
xy
h
w
m
m
dz
K
x y
τ
ν
−
∂
=
=
= − −
∂ ∂
ň
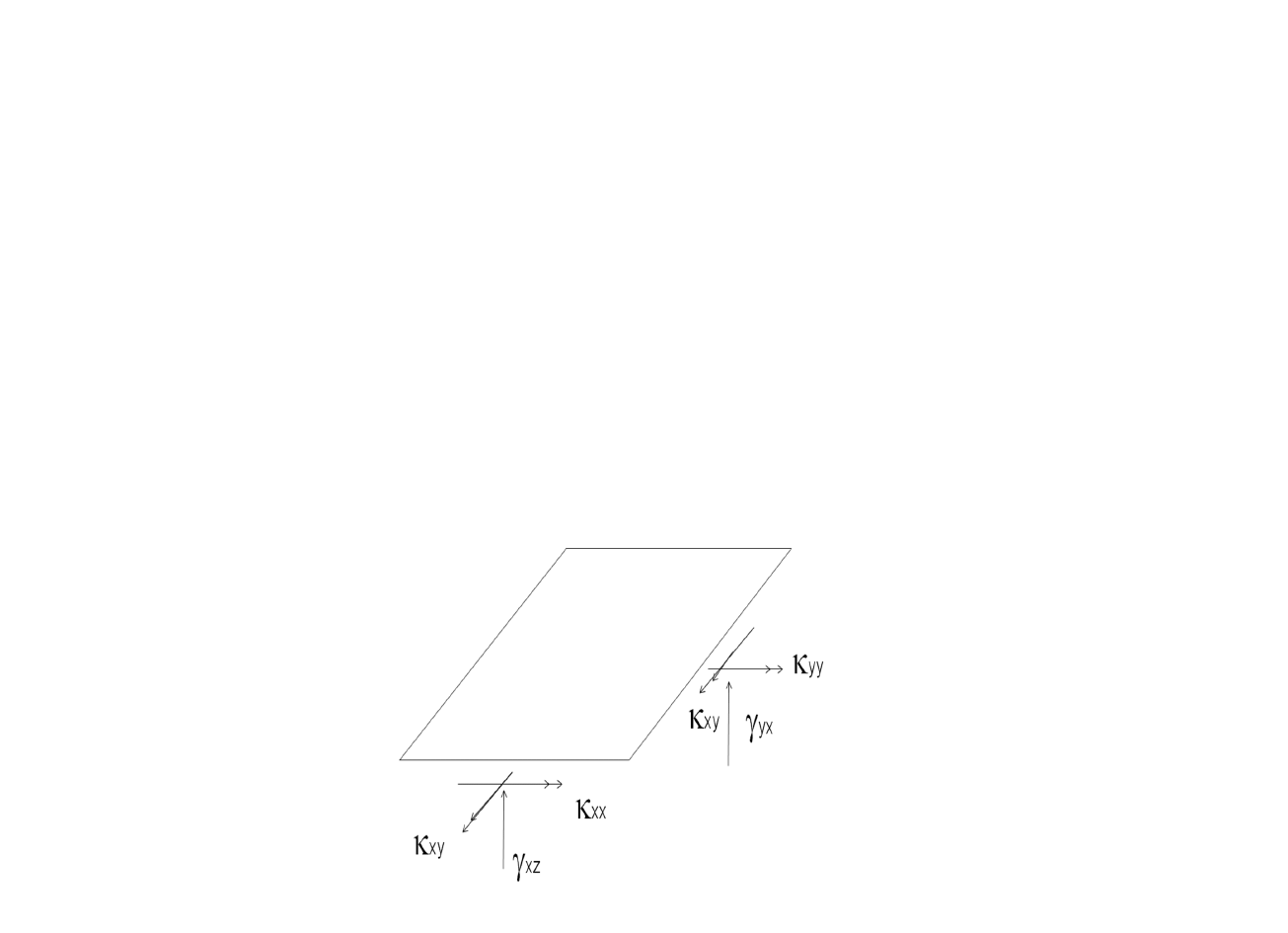
Rys.3.4: Siły tnące i momenty na
Rys.3.4: Siły tnące i momenty na
bokach
płyty
pracującej
bokach
płyty
pracującej
dwukierunkowo
dwukierunkowo
[ ,
,
]
w w
w
y
x
∂
∂
∂
∂
, ,
xx
yy
xy
ε ε γ
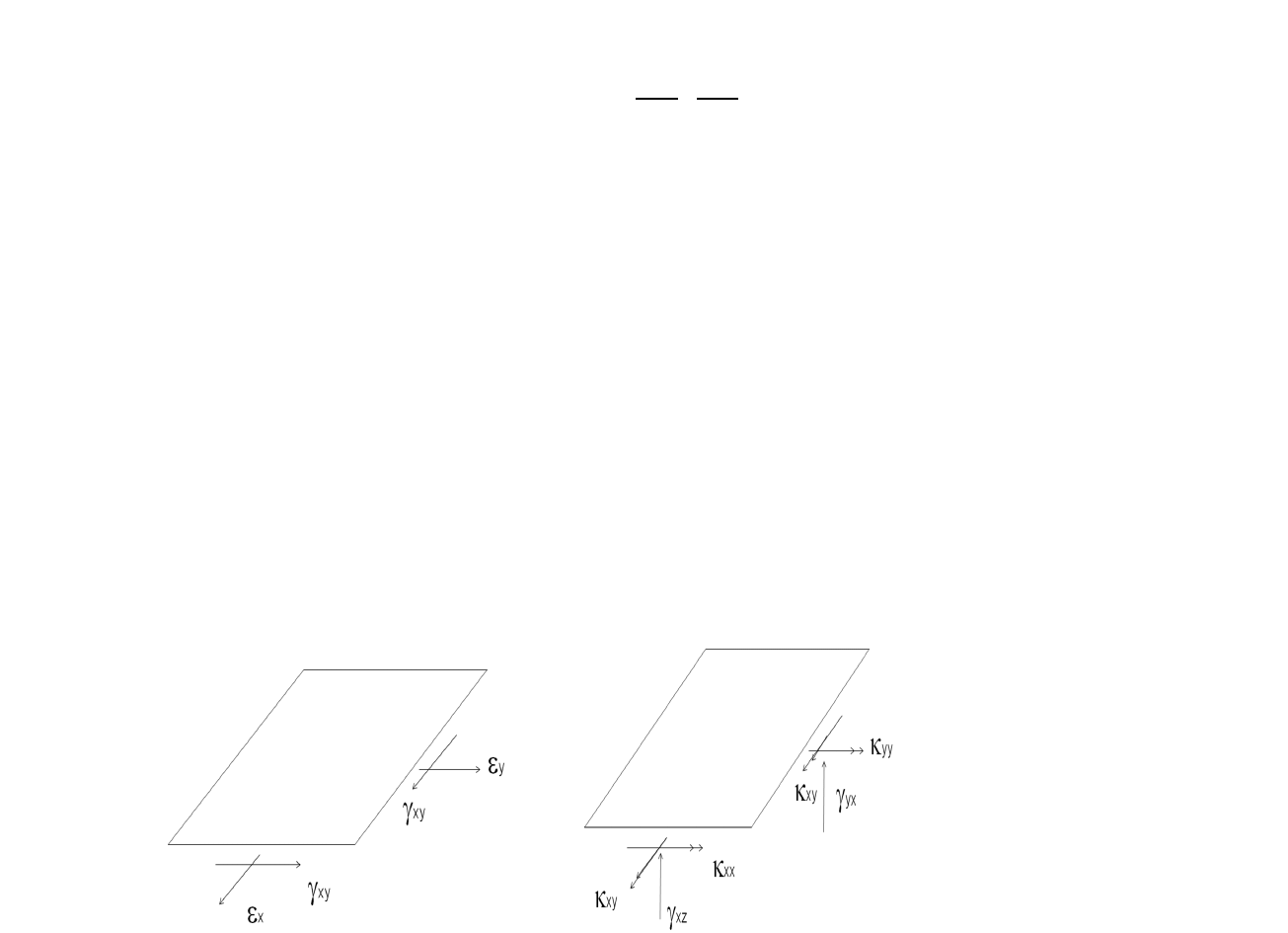
Każdy punkt płyty ma 3 stopnie swobody
(przemieszczenie + 2 obroty):
Na podstawie przemieszczeń i obrotów oblicza się odkształcenia
.
Obliczenia płyt można też wykonać w oparciu o teorię sprężystości dla
tzw. płyty Mindlina, która uwzględnia się odkształcenia styczne
(Rys.3.5). Każdy węzeł ma wtedy 5 stopni swobody (3 przemieszczenia i
2 niezależne obroty): u, v, w,
θ
x
i
θ
y
. Na podstawie przemieszczeń i
obrotów wyznacza się odkształcenia i siły wewnętrzne:
[ ,
,
,
,
, ,
]
[ , , , ,
, , ]
xx
yy
xx
yy
xy
xz
yz
x
y
x
y
xy
x
y
n n m m m q q
ε ε κ κ κ γ γ
→
.
Zakrzywienia oblicza się ze wzorów:
Zakrzywienia oblicza się ze wzorów:
,
x
y x
κ
θ
=
,
y
x y
κ
θ
= −
,
,
xy
x x
y y
κ
θ
θ
= −
+
Obliczanie płyt krzyżowo-zbrojonych według teorii sprężystości pod
Obliczanie płyt krzyżowo-zbrojonych według teorii sprężystości pod
obciążeniem równomiernym
obciążeniem równomiernym
Płyty jednoprzęsłowe obciążone równomiernie
Płyty jednoprzęsłowe obciążone równomiernie
Momenty przęsłowe są obliczone ze wzorów:
Momenty przęsłowe są obliczone ze wzorów:
2
x
x
x
M
ql
ϕ
=
2
y
y
y
M
ql
ϕ
=
q
q
– obciążenie równomierne,
– obciążenie równomierne,
l
l
x
x
i
i
l
l
y
y
– wymiary płyty,
– wymiary płyty,
ϕ
ϕ
x
x
i
i
ϕ
ϕ
y
y
–
–
współczynniki
współczynniki
Momenty podporowe są obliczone ze wzorów:
Momenty podporowe są obliczone ze wzorów:
-
płyty obustronne zamocowanie
płyty obustronne zamocowanie
2
12
x
x
M
ql
χ
= −
2
(1
)
12
y
y
M
ql
χ
−
= −
- jednostronne zamocowanie
- jednostronne zamocowanie
2
8
x
x
M
ql
χ
= −
2
(1
)
8
y
y
M
ql
χ
−
= −
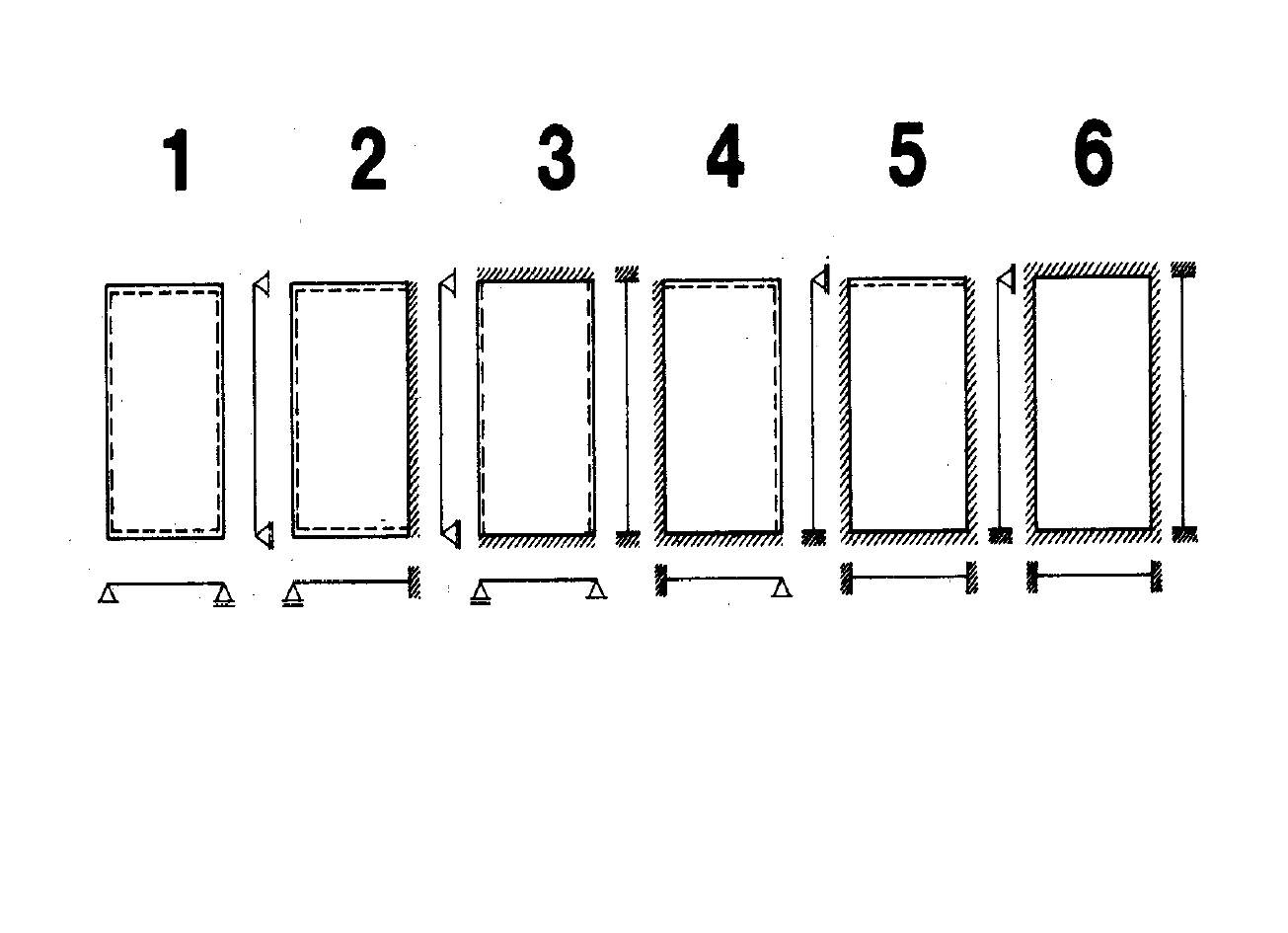
Rys.3.6: Schematy płyt prostokątnych podpartych wzdłuż
Rys.3.6: Schematy płyt prostokątnych podpartych wzdłuż
obwodu
obwodu
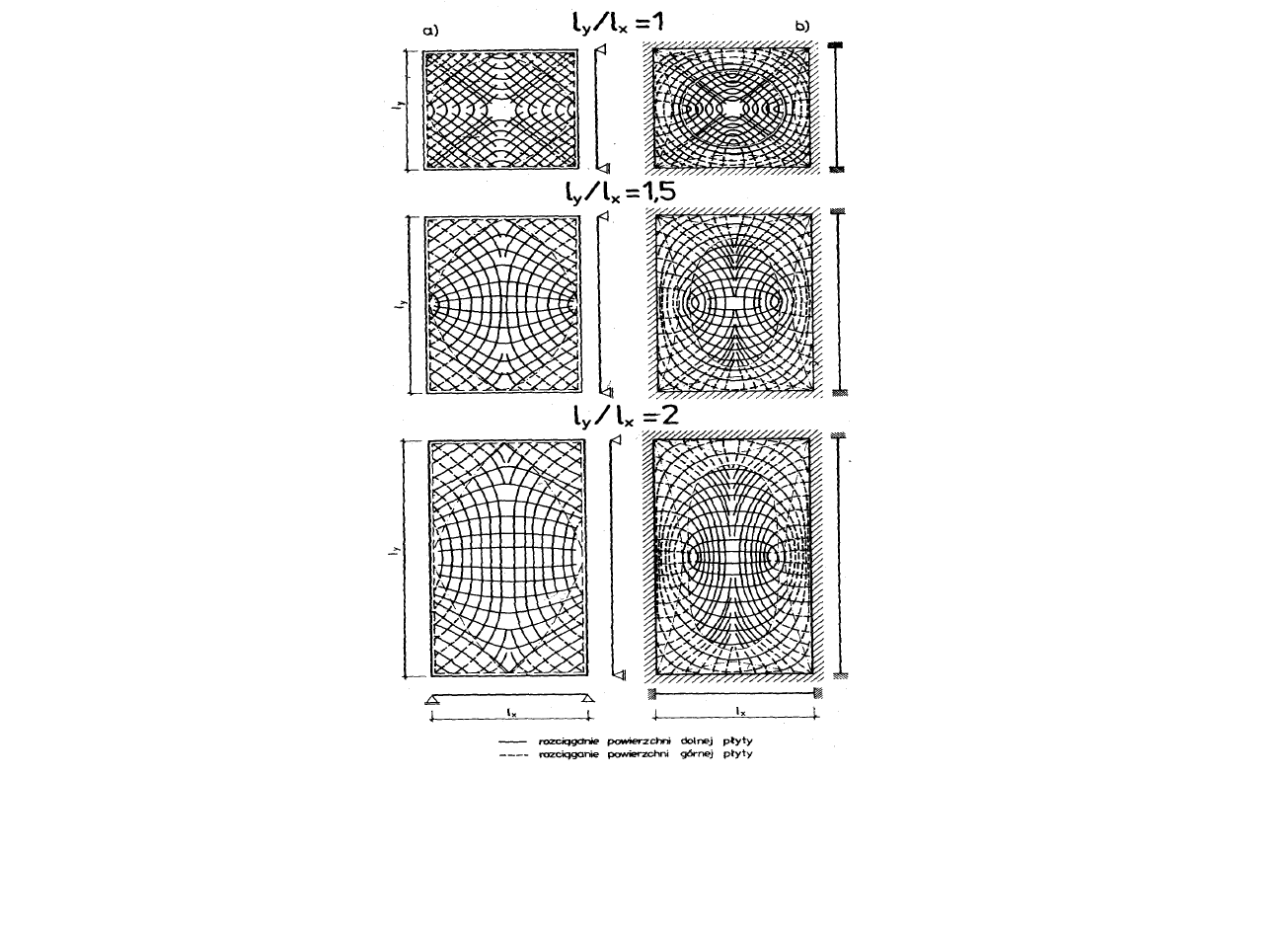
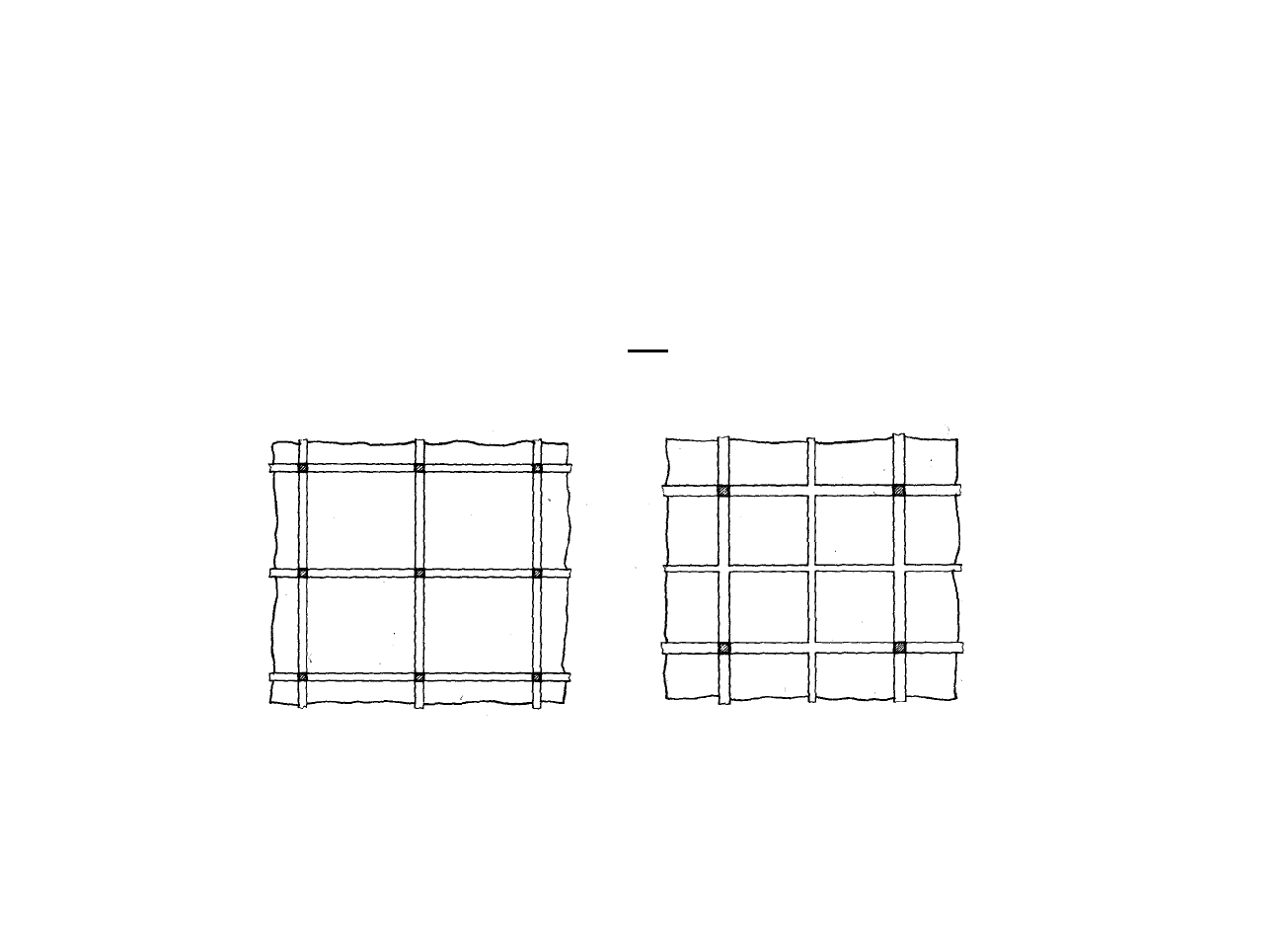
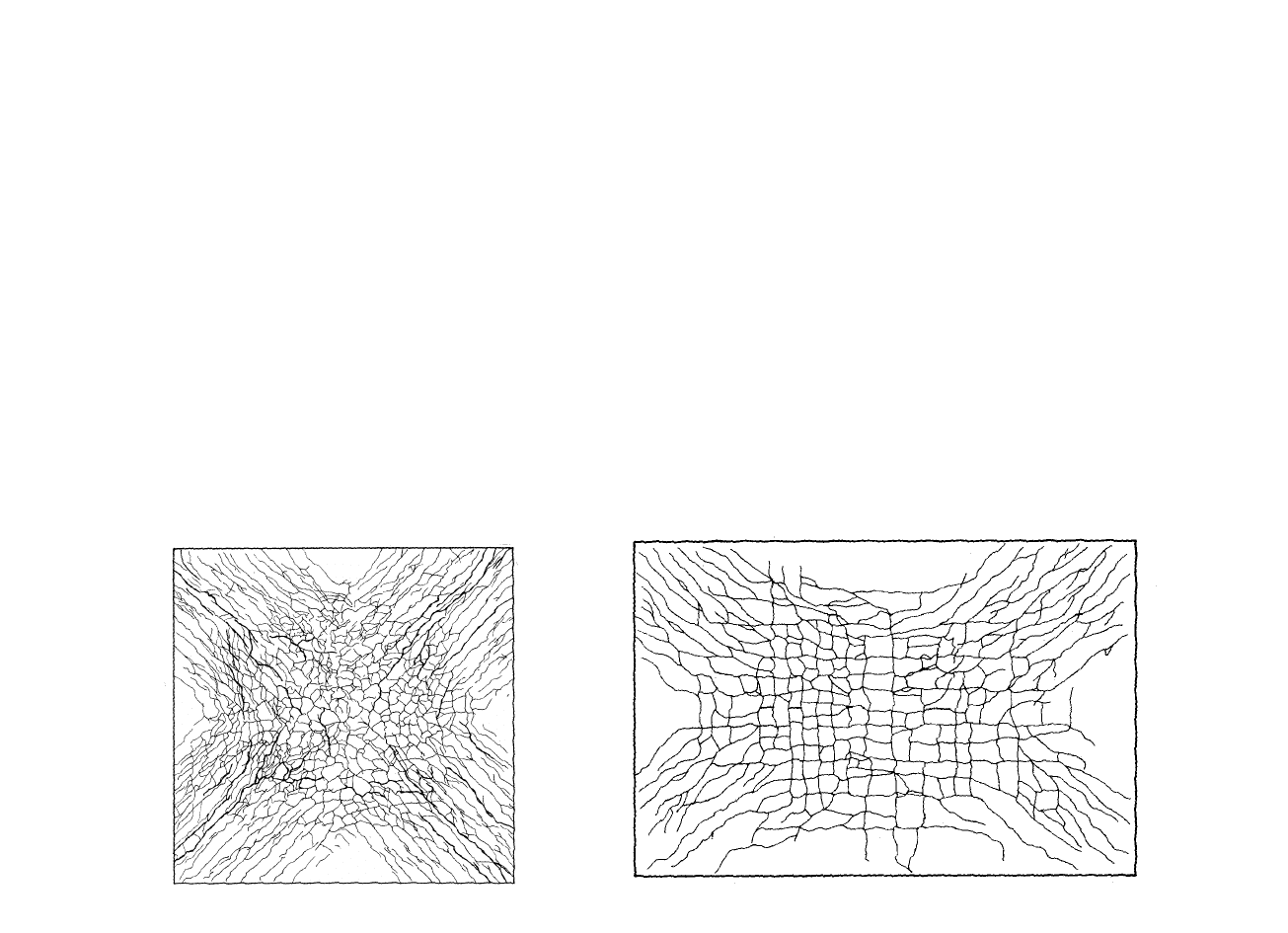
Rys.3.7: Trajektorie momentów głównych dla płyty obciążonej
równomiernie: a) płyta swobodnie podparta na obwodzie, b) płyta
zamocowana na obwodzie
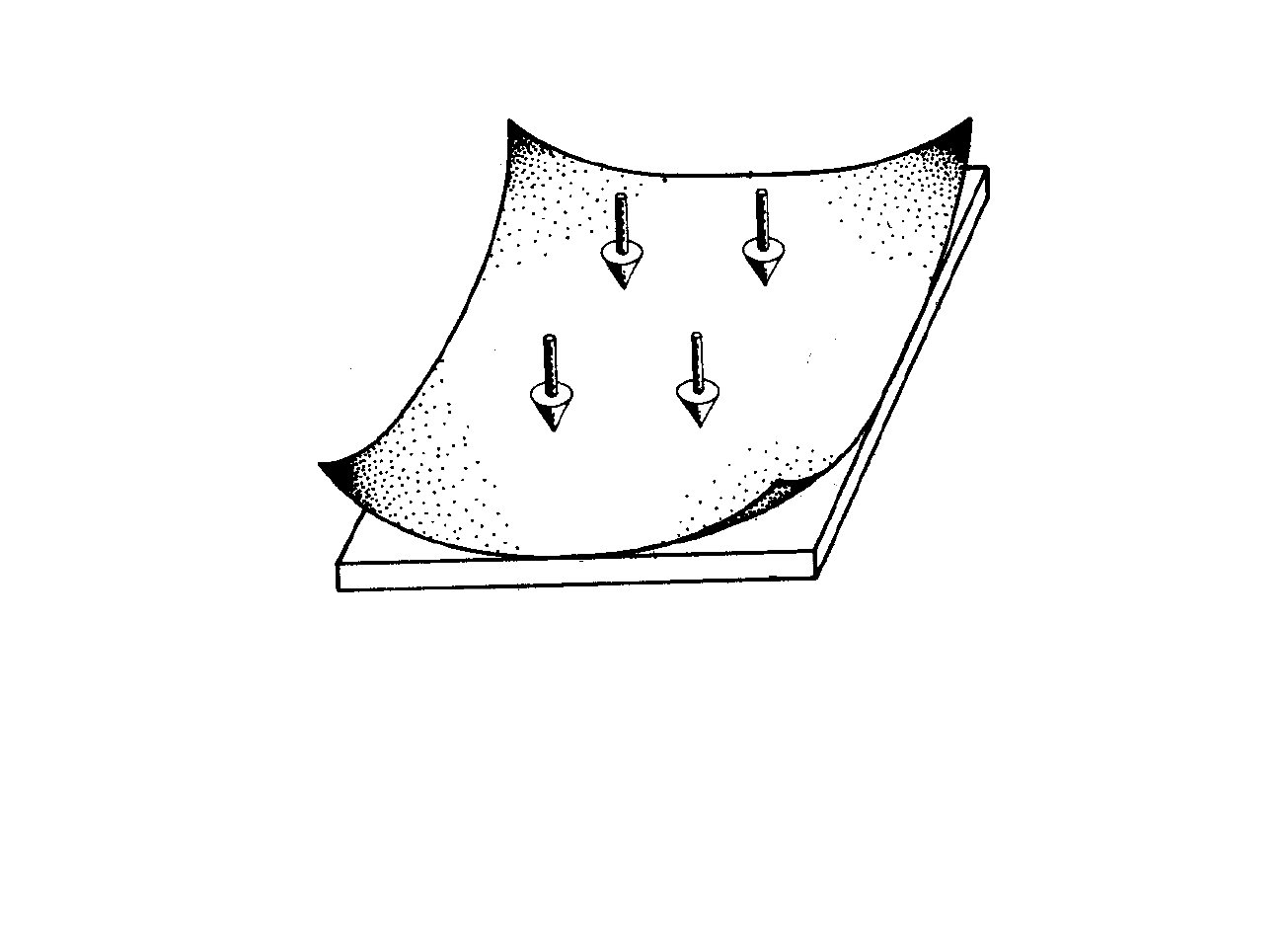
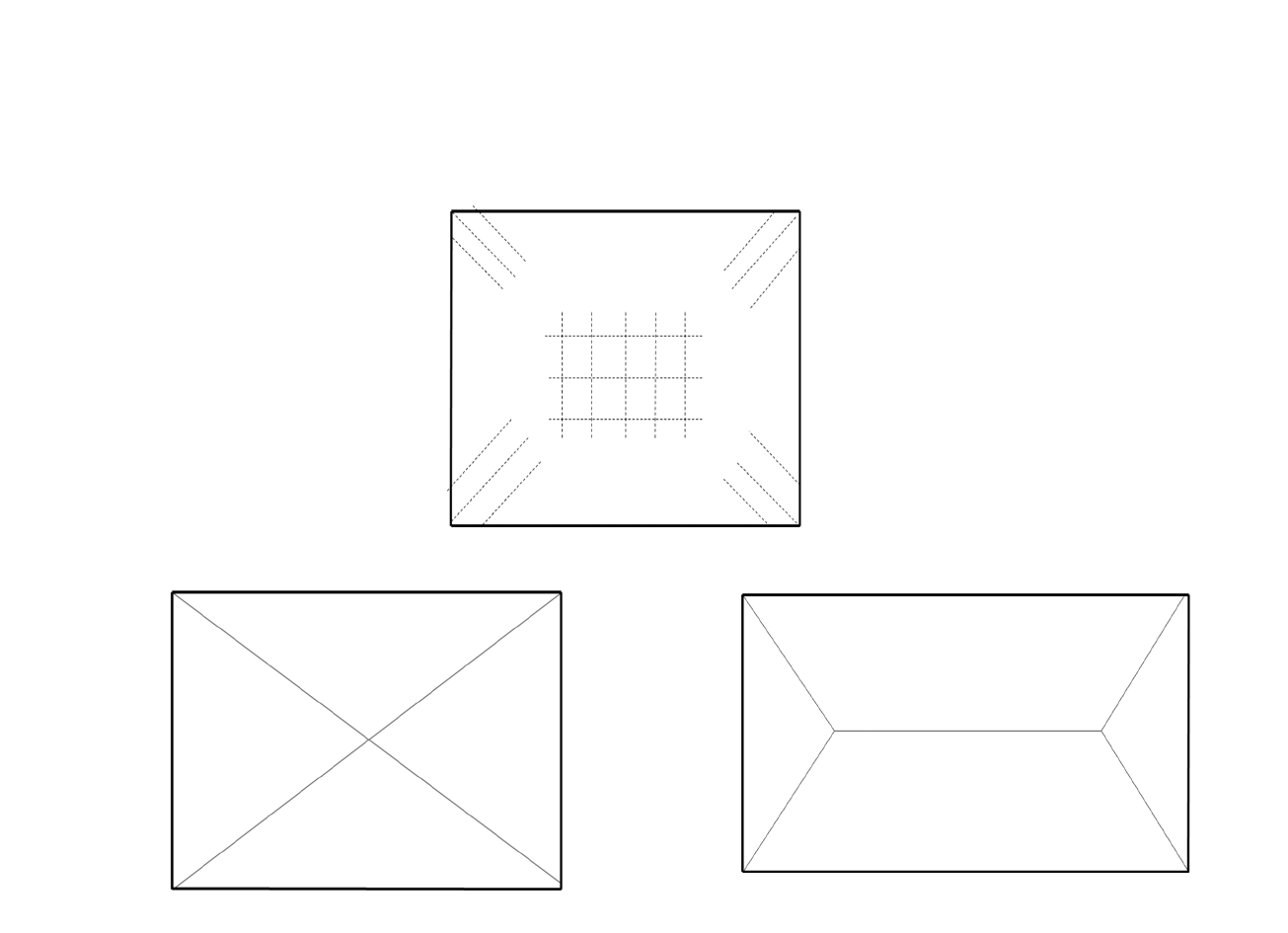
Rys.3.8: Unoszenie naroży płyty podpartej swobodnie wzdłuż obwodu
Rys.3.8: Unoszenie naroży płyty podpartej swobodnie wzdłuż obwodu
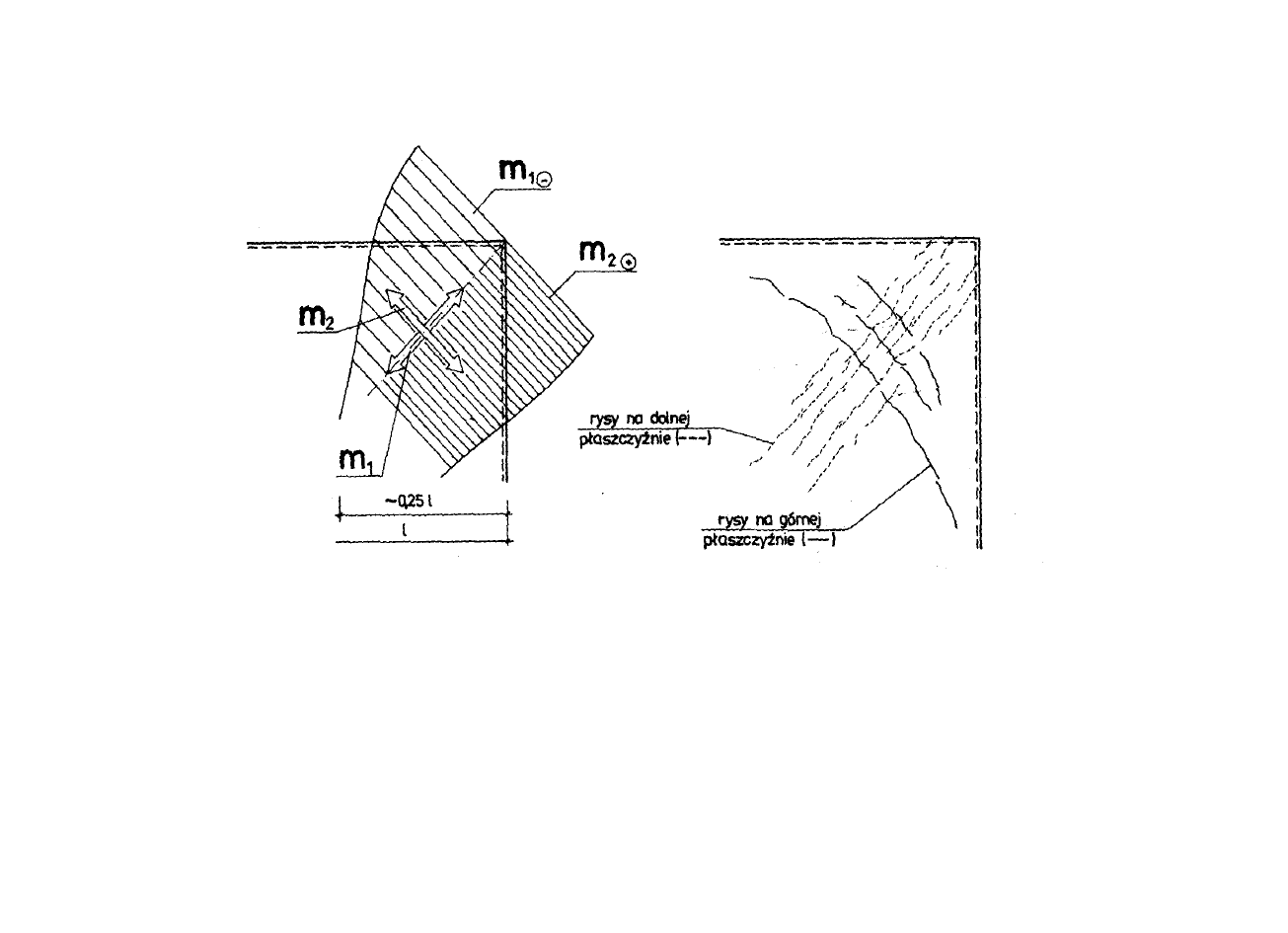
Rys.3.9: Praca części płyty w narożu swobodnie podpartej na
Rys.3.9: Praca części płyty w narożu swobodnie podpartej na
obwodzie: a) główne momenty zginające, b) szkic zarysowania
obwodzie: a) główne momenty zginające, b) szkic zarysowania
a
a
b
b
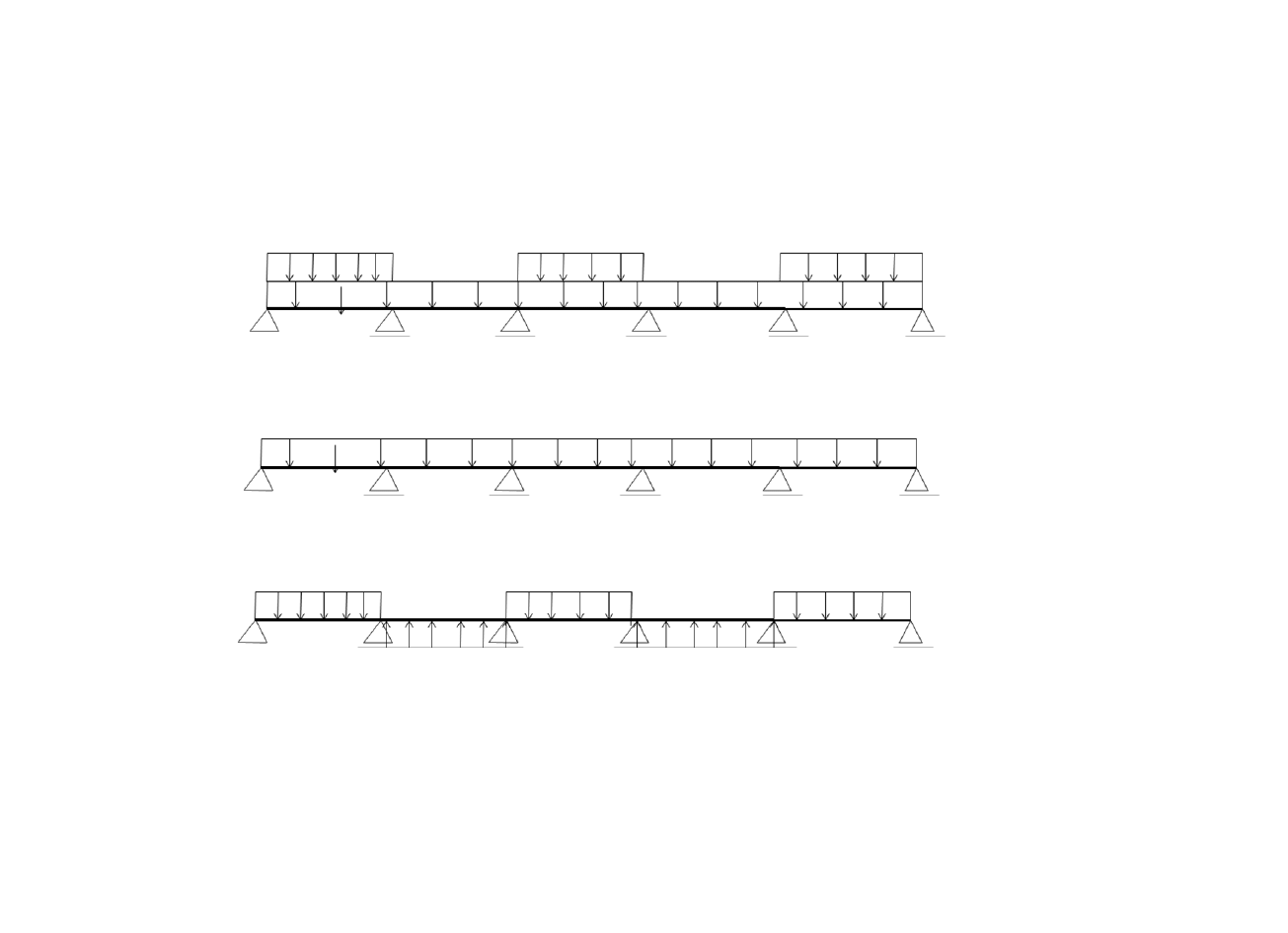
Płyty wieloprzęsłowe obciążone równomiernie
Płyty wieloprzęsłowe obciążone równomiernie
W celu obliczenia maksymalnych momentów przęsłowych schemat
W celu obliczenia maksymalnych momentów przęsłowych schemat
obciążeniowy
obciążeniowy
g
g
i
i
p
p
jest rozłożony na 2 schematy (Rys.3.10).
jest rozłożony na 2 schematy (Rys.3.10).
q’=g+p
q’=g+p
/2
/2
g+p
g+p
q”=p
q”=p
/2
/2
Rys.6.6: Schemat obciążeniowy do wyznaczenia maksymalnych
Rys.6.6: Schemat obciążeniowy do wyznaczenia maksymalnych
momentów przęsłowych w płytach pracujących dwukierunkowo
momentów przęsłowych w płytach pracujących dwukierunkowo
(Starosolski 1985)
(Starosolski 1985)
Maksymalne momenty przęsłowe
Maksymalne momenty przęsłowe
(przy szachownicowym obciążeniu
(przy szachownicowym obciążeniu
p)
p)
2
'
''
1
(
)
x
x
x
x
M
l
q
q
ϕ
ϕ
=
+
2
'
''
1
(
)
y
y
y
y
M
l
q
q
ϕ
ϕ
=
+
2
'
''
4
1
(
)
x
x
x
x
M
l
q
q
ϕ
ϕ
=
+
2
'
''
4
1
(
)
y
y
x
y
M
l
q
q
ϕ
ϕ
=
+
2
'
''
5
1
(
)
x
x
x
x
M
l
q
q
ϕ
ϕ
=
+
2
'
''
5
1
(
)
y
y
x
y
M
l
q
q
ϕ
ϕ
=
+
‘
‘
4’
4’
‘
‘
5’
5’
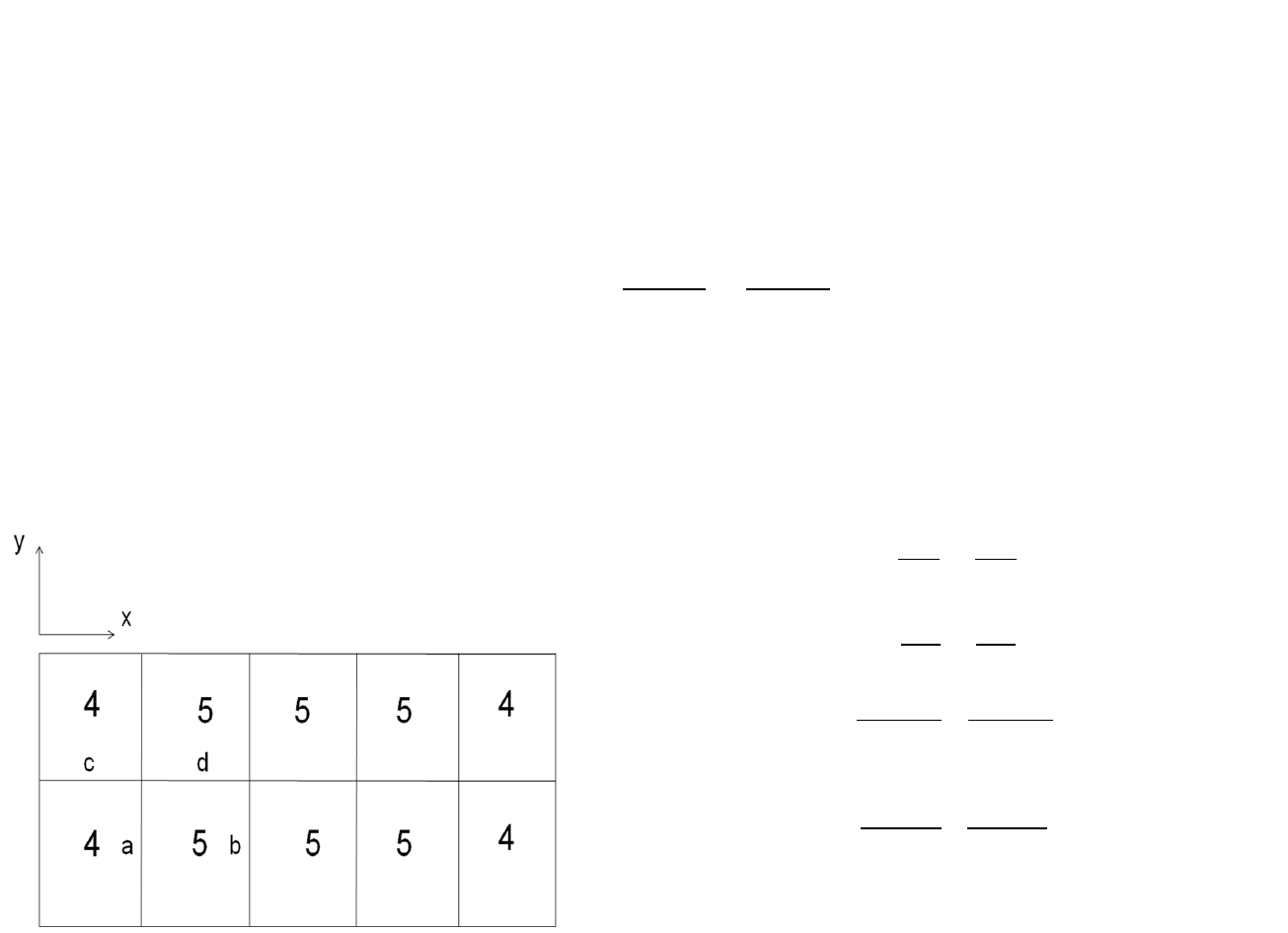
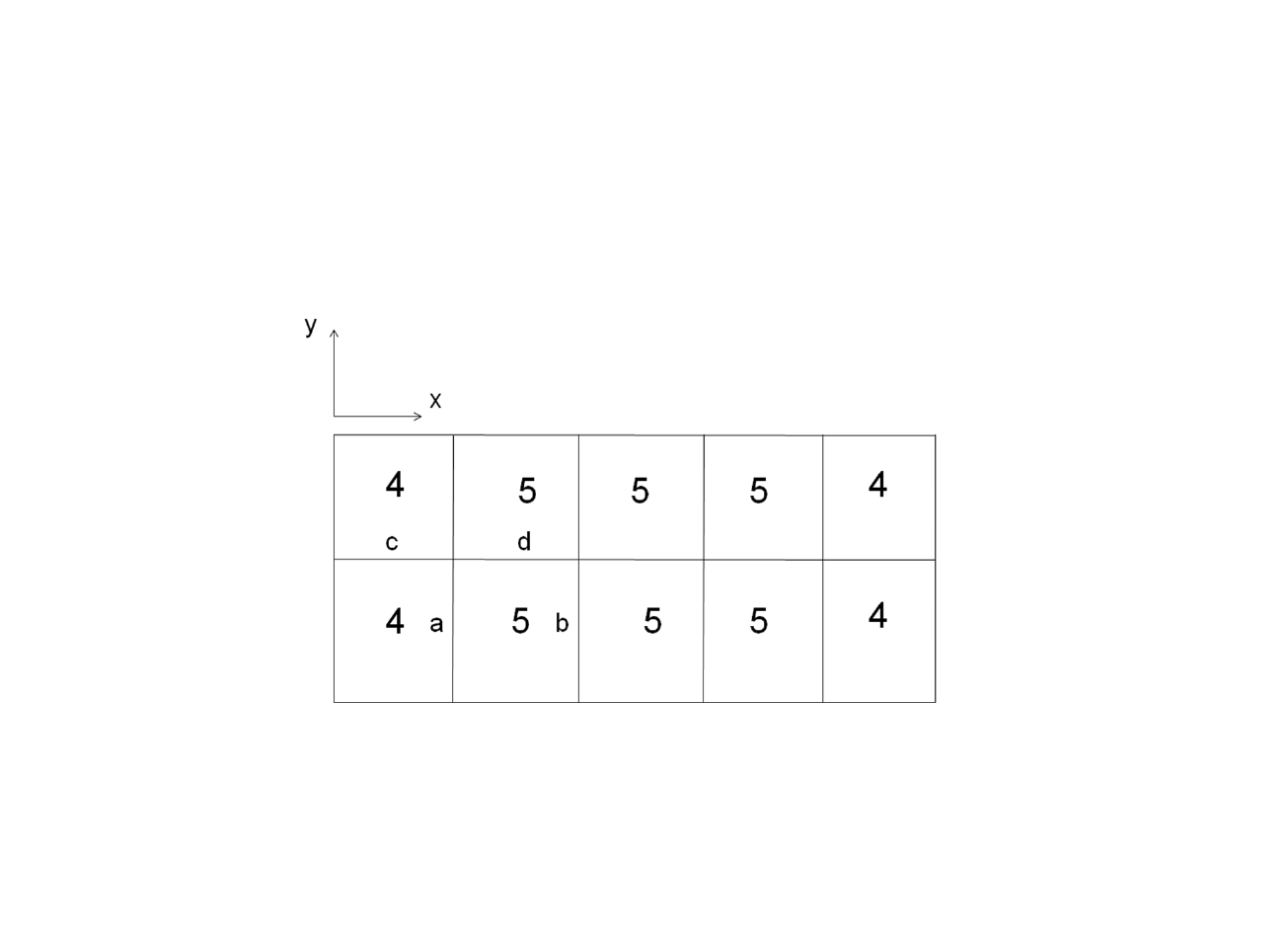
Maksymalne momenty podporowe otrzymuje się
Maksymalne momenty podporowe otrzymuje się
przy obciążeniu wszystkich przęseł (
przy obciążeniu wszystkich przęseł (
q=p+g
q=p+g
)
)
2
2
(
)
pod
i xL
i xP
x
L
P
l
l
M
q
χ
χ
ψ
ψ
= −
−
gdzie (jeżeli przeciwległa podpora jest swobodnie podparta)
gdzie (jeżeli przeciwległa podpora jest swobodnie podparta)
oraz (jeżeli przeciwległa podpora jest utwierdzona).
oraz (jeżeli przeciwległa podpora jest utwierdzona).
,
16
L P
ψ
=
,
24
L P
ψ
=
2
5
4
(
)
16
24
pod
a
x
M
ql
χ
χ
= −
+
2
5
5
(
)
24 24
pod
b
x
M
ql
χ
χ
= −
+
2
4
4
(1
) (1
)
(
)
16
16
pod
c
y
M
ql
χ
χ
−
−
= −
+
‘
‘
a’
a’
‘
‘
b’
b’
‘
‘
c’
c’
2
5
5
(1
) (1
)
(
)
16
16
pod
d
y
M
ql
χ
χ
−
−
= −
+
‘
‘
d’
d’
Momenty krawędziowe oblicza się ze wzorów:
Momenty krawędziowe oblicza się ze wzorów:
2 2
kr
pod
x
x
x
ql b
M
M
χ
=
+
(1
)
2
2
y
kr
pod
y
y
ql b
M
M
χ
−
=
+
gdzie
gdzie
b
b
– szerokość podpory
– szerokość podpory
.
.
3.3 Obliczanie płyt według teorii nośności
3.3 Obliczanie płyt według teorii nośności
granicznej
granicznej
W konstrukcji żelbetowej obliczonej według liniowej teorii
W konstrukcji żelbetowej obliczonej według liniowej teorii
sprężystości tkwią znaczne rezerwy nośności. Analizując stan
sprężystości tkwią znaczne rezerwy nośności. Analizując stan
granicznego zniszczenia można uzyskać około 20-25%
granicznego zniszczenia można uzyskać około 20-25%
oszczędności zbrojenia.
oszczędności zbrojenia.
Obszar zarysowania płyty krzyżowo zbrojonej:
Obszar zarysowania płyty krzyżowo zbrojonej:
Przyjmuje się, że zarysowanie (uplastycznienie) przekrojów występuje
Przyjmuje się, że zarysowanie (uplastycznienie) przekrojów występuje
wzdłuż pewnych linii zwanych liniami załomów, których przebieg
wzdłuż pewnych linii zwanych liniami załomów, których przebieg
zależy od warunków podparcia, stosunku boków, obciążenia i zbrojenia
zależy od warunków podparcia, stosunku boków, obciążenia i zbrojenia
Warunek nośności płyty określa się metodą kinematyczną
Warunek nośności płyty określa się metodą kinematyczną
przyrównując pracę sił zewnętrznych do pracy sił wewnętrznych.
przyrównując pracę sił zewnętrznych do pracy sił wewnętrznych.
Praca sił zewnętrznych jest pracą obciążeń na przemieszczeniach od
Praca sił zewnętrznych jest pracą obciążeń na przemieszczeniach od
odkształceń
odkształceń
Praca sił zewnętrznych jest pracą obciążeń na przemieszczeniach od
Praca sił zewnętrznych jest pracą obciążeń na przemieszczeniach od
odkształceń
odkształceń
V
L q ydF
qV
δ =
=
ň
gdzie
gdzie
q
q
– obciążenie równomiernie rozłożone,
– obciążenie równomiernie rozłożone,
V
V
–
–
objętość bryły między powierzchnia płyty przed
objętość bryły między powierzchnia płyty przed
obciążeniem i po obciążeniu
obciążeniem i po obciążeniu
(3
)
6
x
y
x
fl
V
l
l
=
−
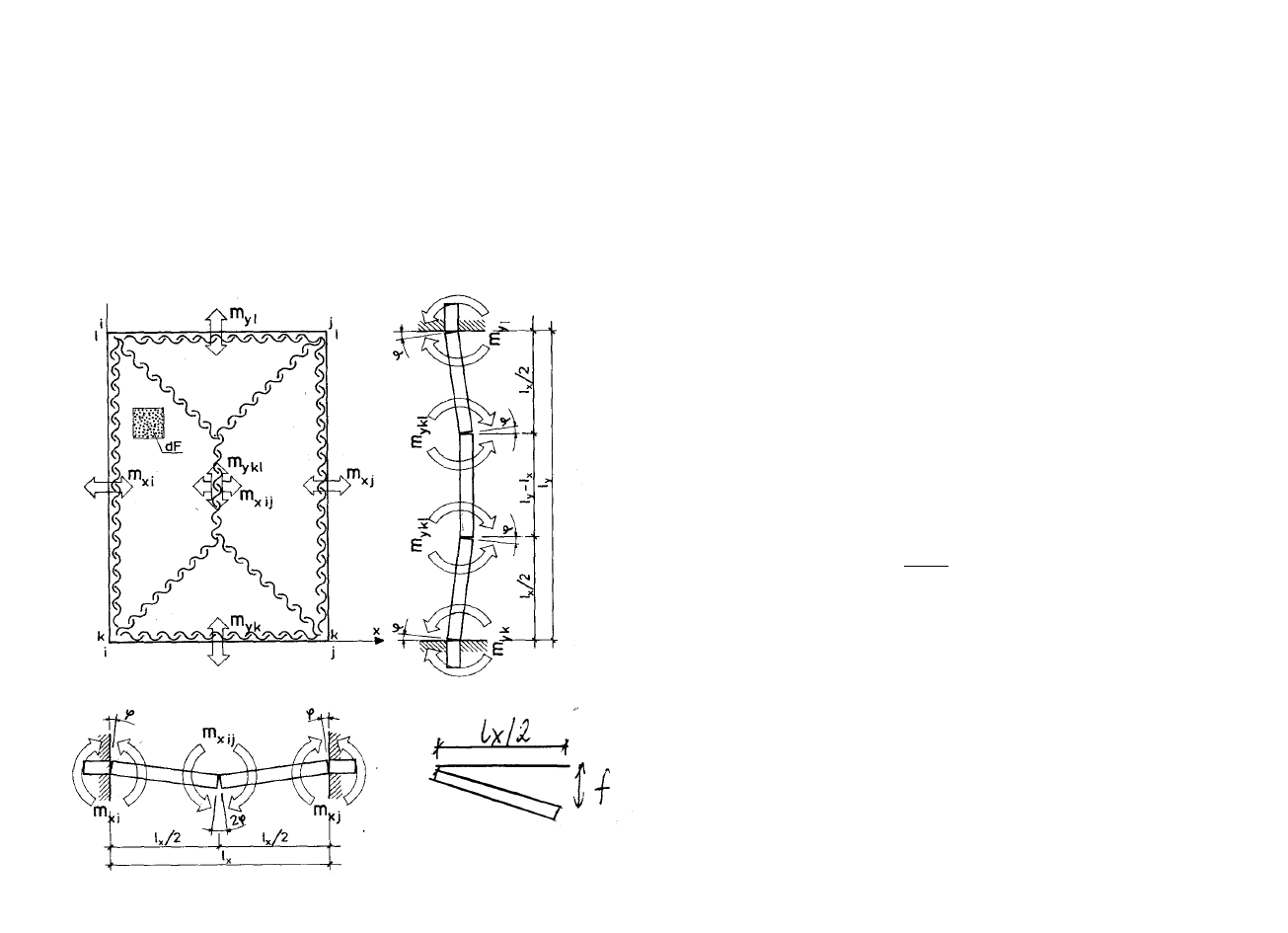
Praca sił wewnętrznych jest pracą momentów zginających na
Praca sił wewnętrznych jest pracą momentów zginających na
odpowiadających im kątach płatów wzdłuż linii załomu. Zakłada
odpowiadających im kątach płatów wzdłuż linii załomu. Zakłada
się, że zbrojenie jest rozłożone równomiernie dla każdego
się, że zbrojenie jest rozłożone równomiernie dla każdego
kierunku.
kierunku.
Praca sił wewnętrznych jest równa
Praca sił wewnętrznych jest równa
U
M
δ
ϕ
=
ĺ
(
2
)
(
2
)
g
d
g
g
d
g
xi
xij
xj
y
yk
ykl
yl
x
U
m
m
m
l
m
m
m
l
δ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
=
+
+
+
+
+
2
(tan
)
f
l
ϕ
ϕ ϕ
=
≅
Z porównania prac
Z porównania prac
2
(
2
)
(
)
(3
)
12
g
d
g
g
d
g
xi
xij
xj
y
yk
ykl
yl
x
x
y
x
q
m
m
m l
m
m
m l
l
l
l
+
+
+
+
+
=
−
Redukcja zbrojenia w pasmach środkowych o 50% w pasmach o
Redukcja zbrojenia w pasmach środkowych o 50% w pasmach o
szerokości 1/5
szerokości 1/5
l
l
uwzględnia się przez redukcję momentu
uwzględnia się przez redukcję momentu
m
m
xij
xij
i
i
m
m
ykl
ykl
.
.
Dla kierunku
Dla kierunku
l
l
y
y
2
8
2
2
2
2 5
5
d
xij
d
d
xij
y
xij y
m
m
l
m l
ϕ
ϕ
ϕ
−
=
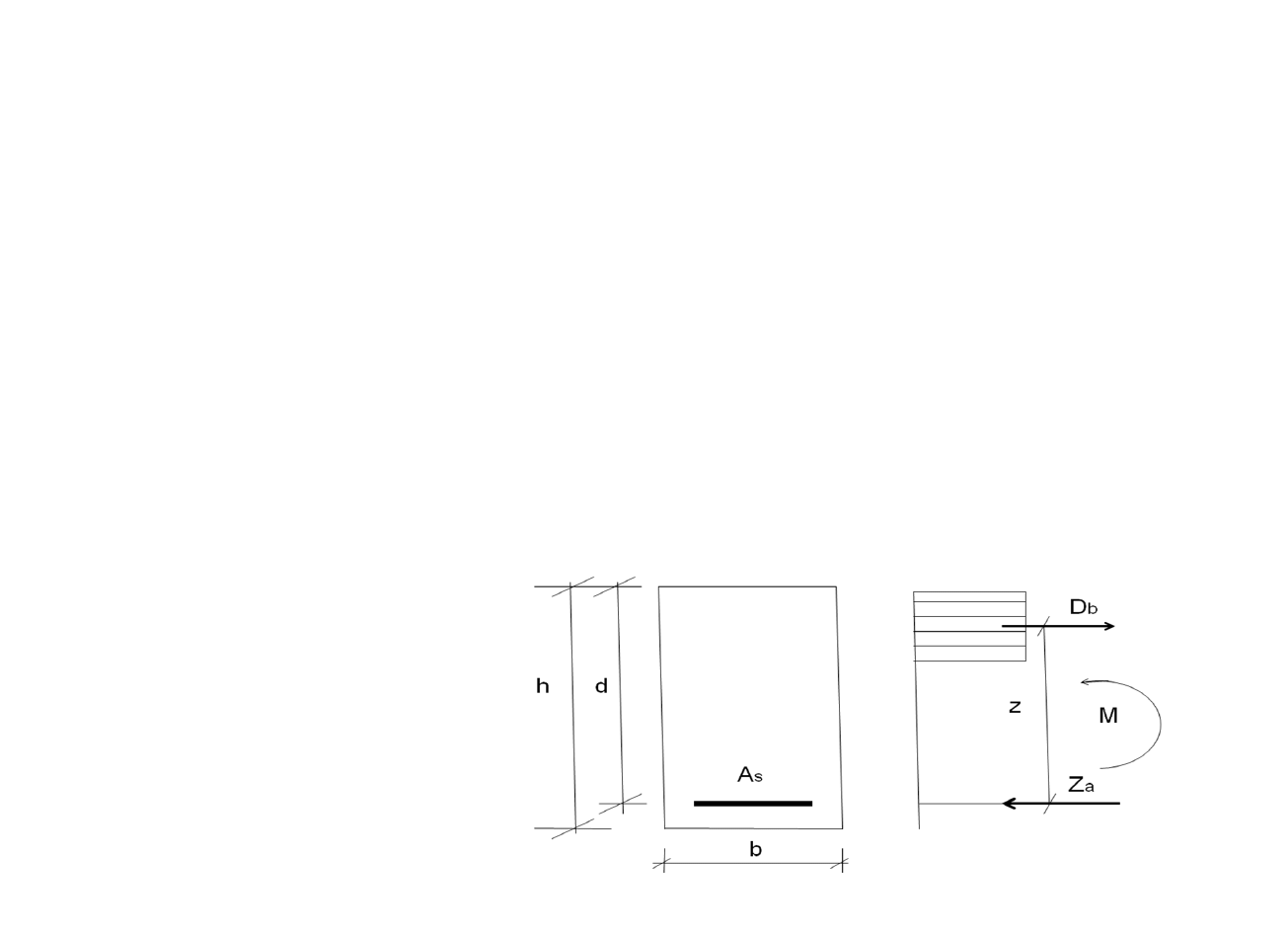
W stanie granicznym momenty są równe
W stanie granicznym momenty są równe
g
xi
si
y
m
A f z
η
=
g
xij
sij y
m
A f z
η
=
g
xi
sj
y
m
A f z
η
=
0.9
z
d
≅
a
s
y
Z
A f
=
Współczynnik redukcyjny jest przyjęty
Współczynnik redukcyjny jest przyjęty
z uwagi na monolityczne połączenie z
z uwagi na monolityczne połączenie z
żebrami i wieńcami:
żebrami i wieńcami:
η
η
=1.25 (dla pól o
=1.25 (dla pól o
podpór wewnętrznych) i
podpór wewnętrznych) i
η
η
=1.10 (dla
=1.10 (dla
pól skrajnych).
pól skrajnych).
xi
xi
xij
m
m
ψ
=
xj
xj
xij
m
m
ψ
=
yk
yk
xij
m
m
ψ
=
yl
yl
xij
m
m
ψ
=
ykl
ykl
xij
m
m
ψ
=
2
[(
2
)
(
) ]
(3
)
12
xij
xi
xi
y
yk
ykl
yl
x
x
y
x
q
m
l
l
l
l
l
ψ
ψ
ψ
ψ
ψ
+ +
+
+
+
=
−
Wprowadza się współczynniki
Wprowadza się współczynniki
ψ
ψ
, które określają stosunek
, które określają stosunek
wszystkich momentów zginających w stosunku do momentu
wszystkich momentów zginających w stosunku do momentu
m
m
xij
xij
Współczynniki
Współczynniki
ψ
ψ
powinny być tak dobrane, aby
powinny być tak dobrane, aby
uzyskane momenty, a co za tym idzie zbrojenie
uzyskane momenty, a co za tym idzie zbrojenie
było proporcjonalne do rozkładu momentów pod
było proporcjonalne do rozkładu momentów pod
obciążeniem eksploatacyjnym.
obciążeniem eksploatacyjnym.
l
x
/l
y
ψ
ykl
ψ
xi ,
ψ
xj
ψ
yk, ,
ψ
yl
1
1.2
1.5
1.8
2.0
0.8-1.0
0.6-0.8
0.35-0.55
0.20-0.40
0.15-0.30
1.3-2.5
1.0-2.0
1.3-2.5
0.2-0.75

Z równania wyznacza się moment zginający
Z równania wyznacza się moment zginający
m
m
xij
xij
,
,
a potem
a potem
pozostałe momenty zginające. Płyty liczymy jako zespół
pozostałe momenty zginające. Płyty liczymy jako zespół
płyt pojedynczych zaczynając od pola wewnętrznego.
płyt pojedynczych zaczynając od pola wewnętrznego.
Obliczając następnie płytę sąsiednią wprowadza się do
Obliczając następnie płytę sąsiednią wprowadza się do
równania momenty podporowe.
równania momenty podporowe.
3.4 Zbrojenie płyt
3.4 Zbrojenie płyt
Zbrojenie płyty krzyżowo-zbrojonej według teorii
Zbrojenie płyty krzyżowo-zbrojonej według teorii
liniowo-sprężystej
liniowo-sprężystej
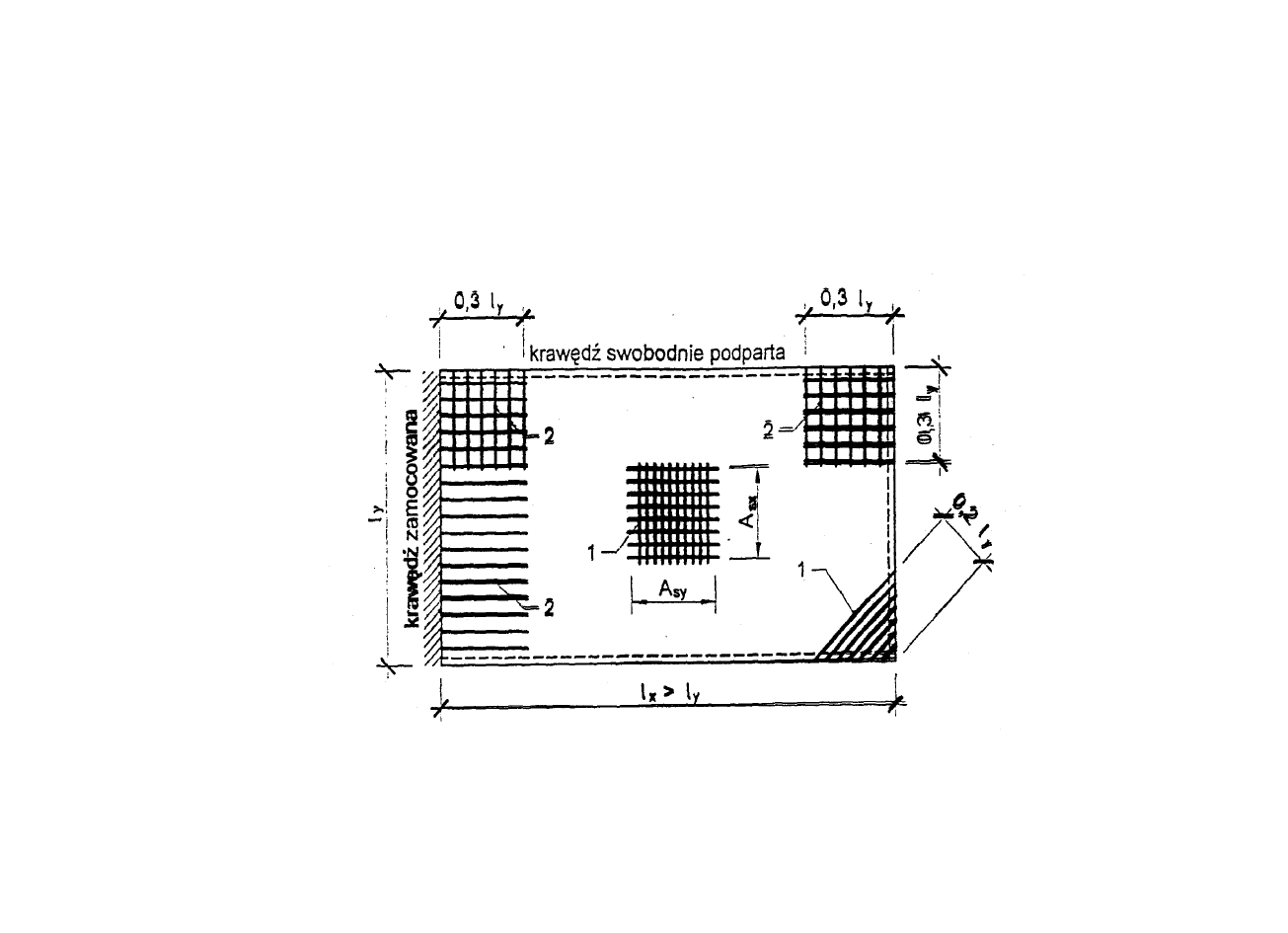
Zbrojenie płyt krzyżowo zbrojonych:
Zbrojenie płyt krzyżowo zbrojonych:
1 – zbrojenie dolne, 2 – zbrojenie górne
1 – zbrojenie dolne, 2 – zbrojenie górne
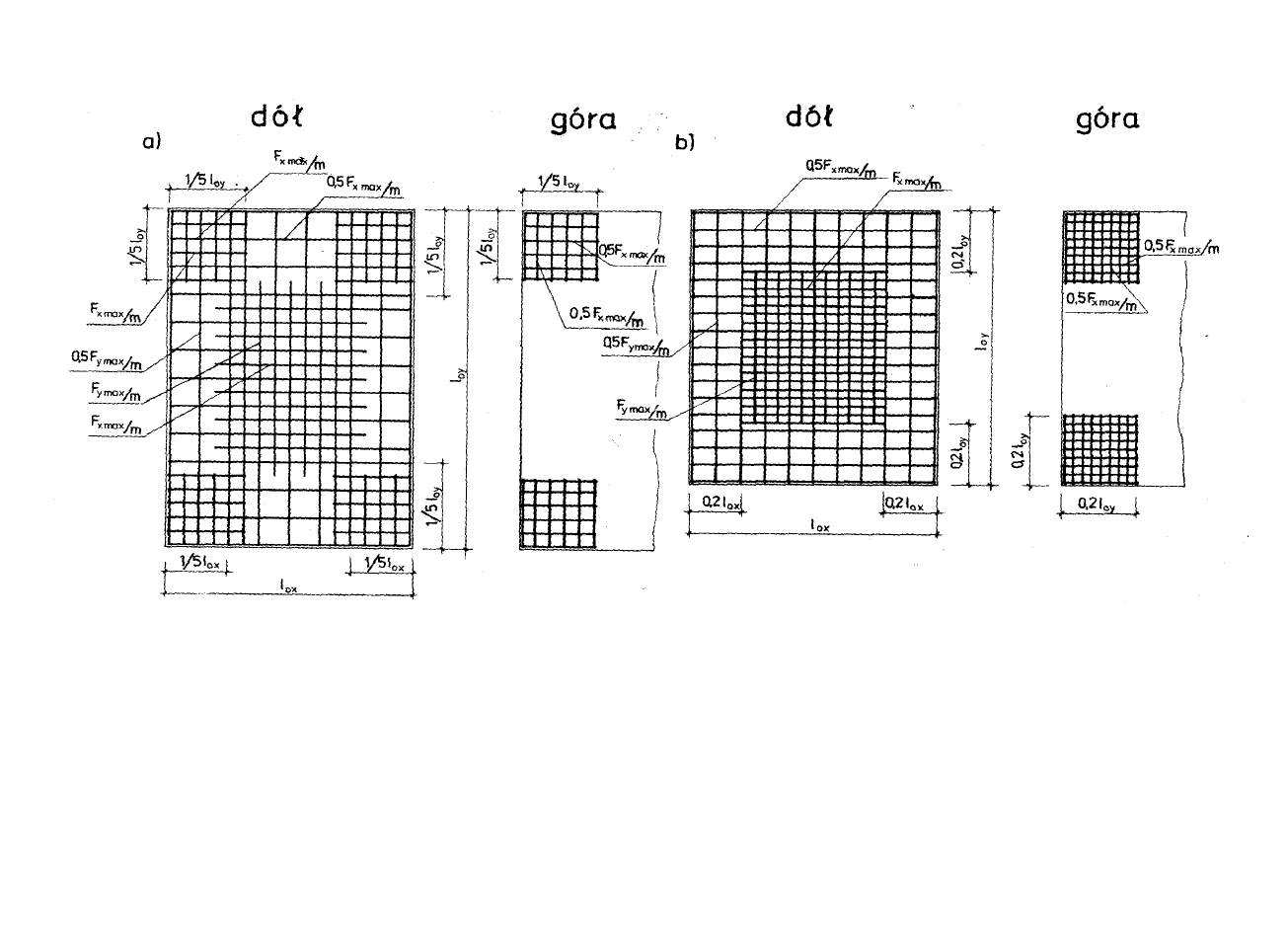
Zbrojenie płyty jednopolowej swobodnie podpartej: a)
Zbrojenie płyty jednopolowej swobodnie podpartej: a)
niezależnymi prętami, b) płaskimi siatkami zgrzewanymi
niezależnymi prętami, b) płaskimi siatkami zgrzewanymi
Obliczanie belek podpierających (żeber)
Obliczanie belek podpierających (żeber)
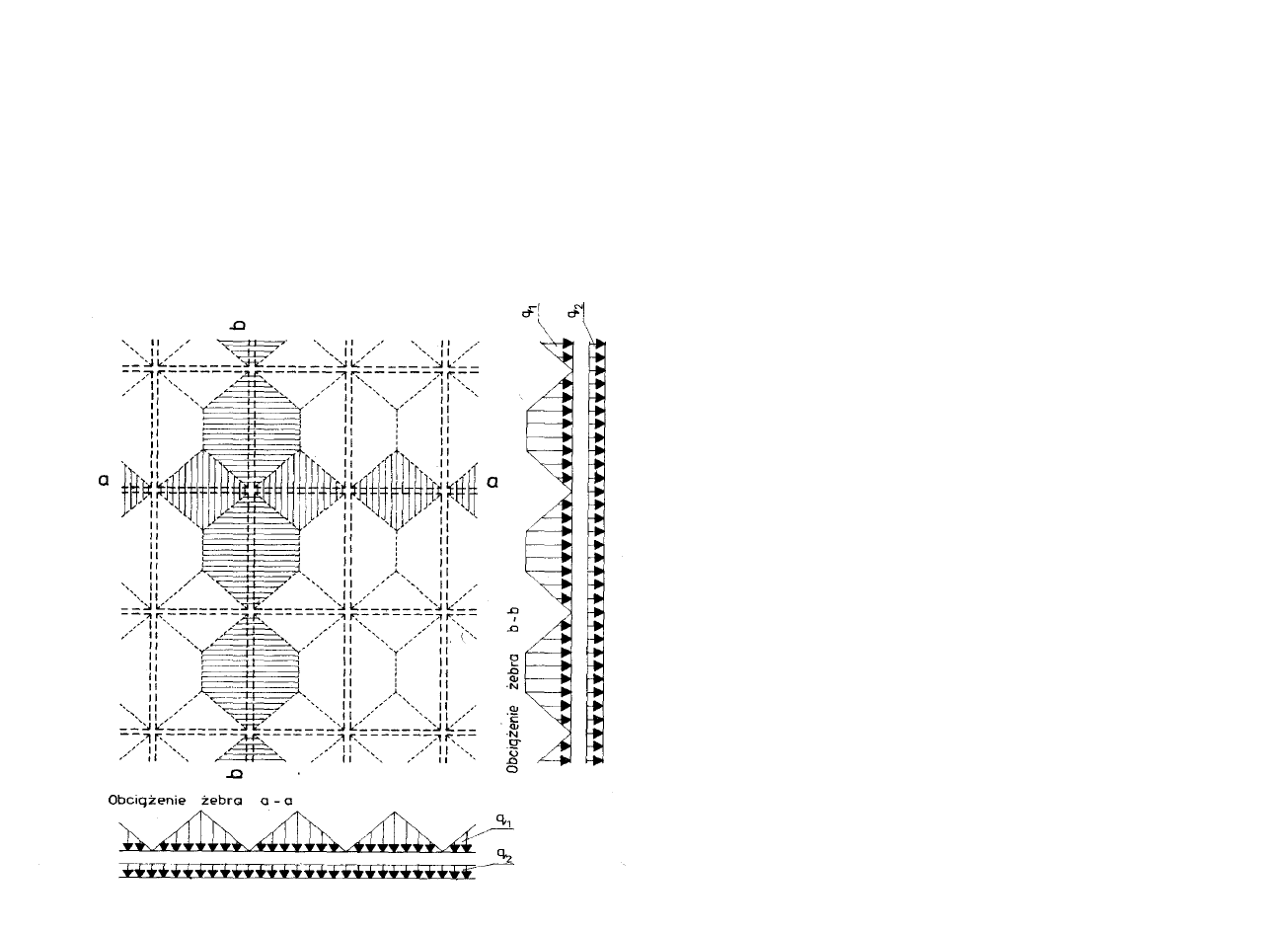
Do obliczeń żeber przyjmuje się obciążenie trapezowe (żebra
Do obliczeń żeber przyjmuje się obciążenie trapezowe (żebra
dłuższe) i trójkątne (żebra krótsze).
dłuższe) i trójkątne (żebra krótsze).
Obciążenie przenoszące się na
Obciążenie przenoszące się na
żebra
podpierające
płyty
żebra
podpierające
płyty
krzyżowo-zbrojone
krzyżowo-zbrojone
(
(
q
q
1
1
– obciążenie płyty,
– obciążenie płyty,
q
q
2
2
– ciężar
– ciężar
własny żebra)
własny żebra)
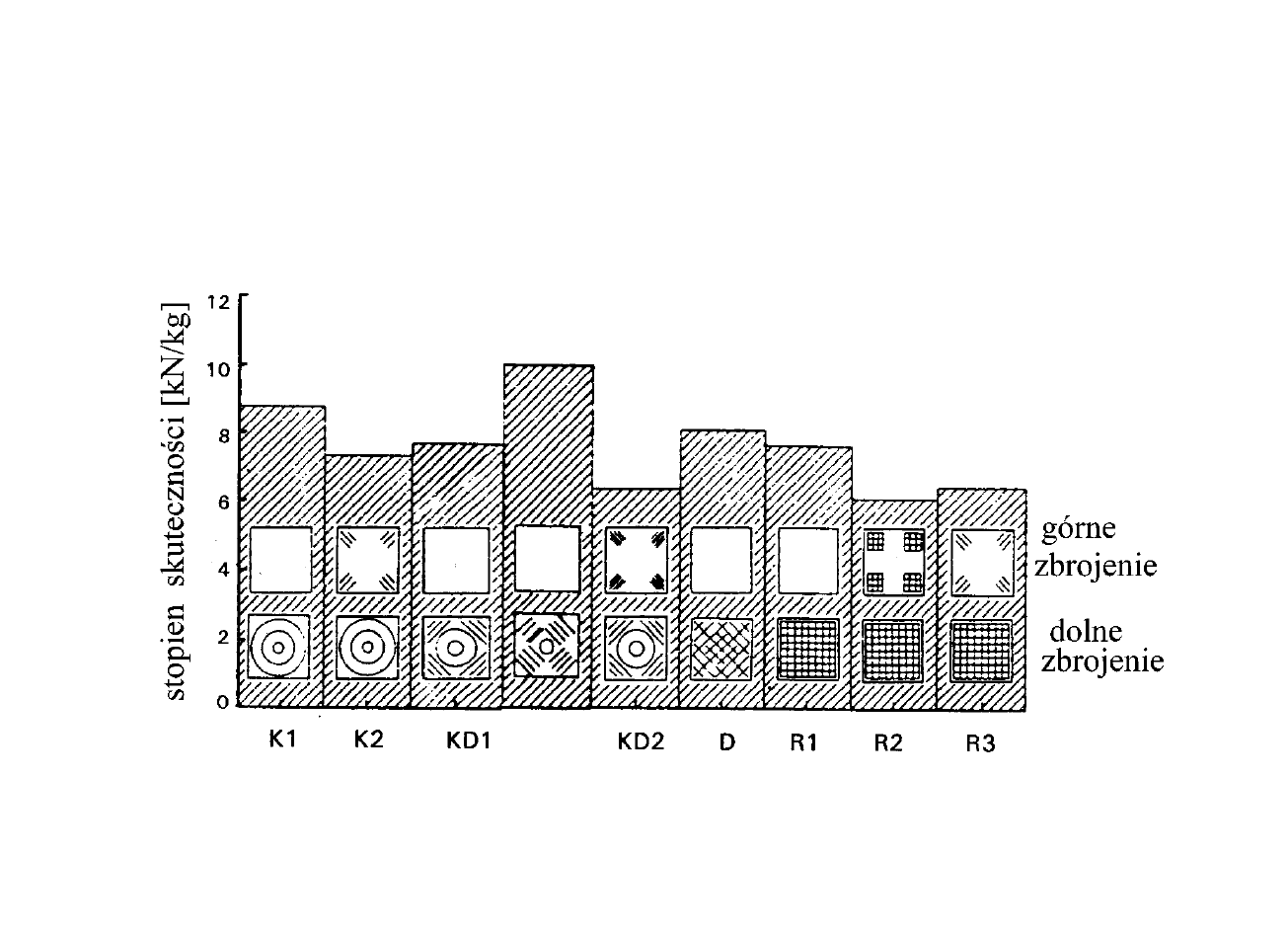
Stopień skuteczności rożnych typów zbrojenia dla płyty
Stopień skuteczności rożnych typów zbrojenia dla płyty
kwadratowej swobodnie podpartej
kwadratowej swobodnie podpartej
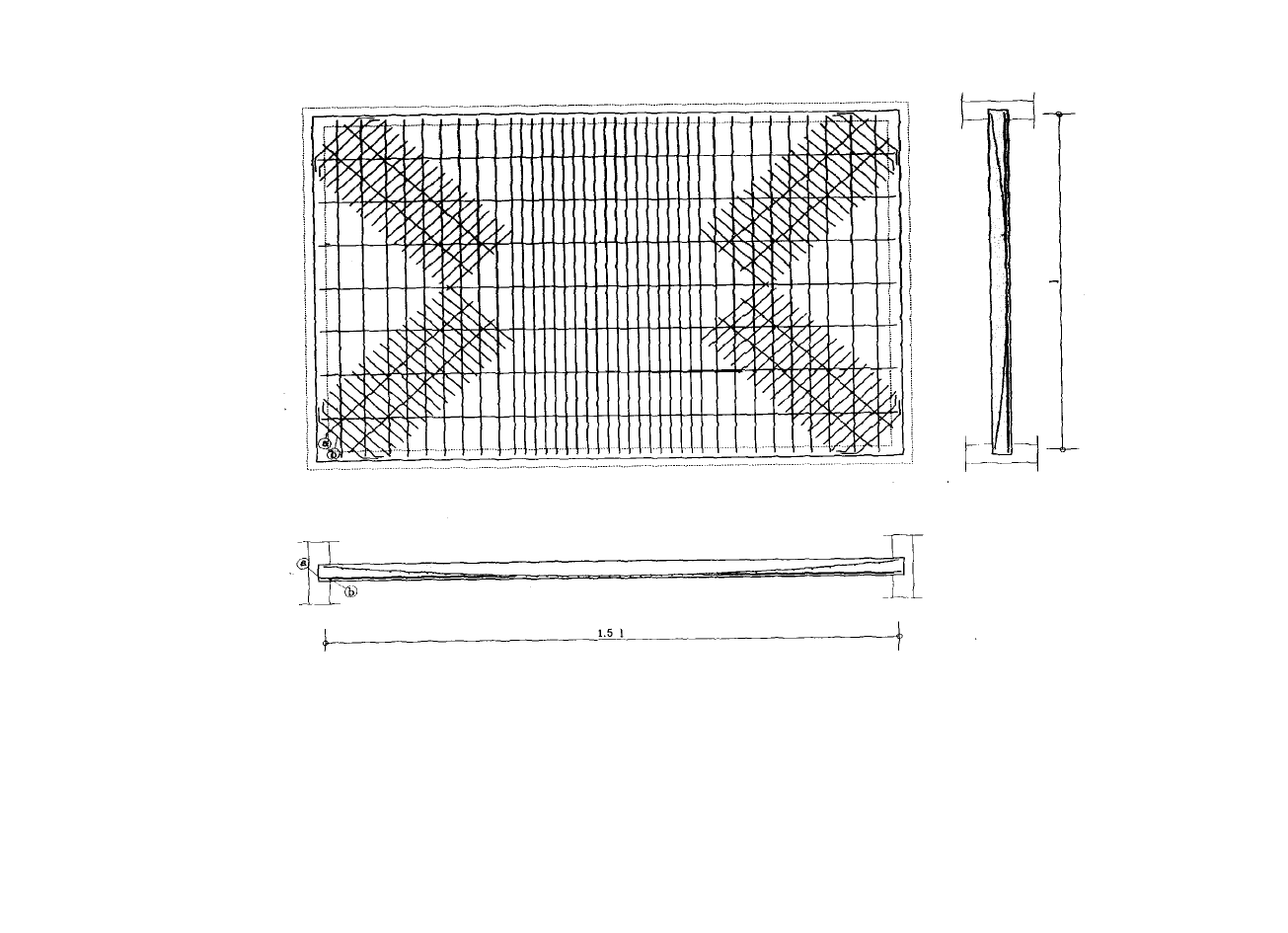
Efektywne zbrojenie płyty prostokątnej (Polonyi 1996)
Efektywne zbrojenie płyty prostokątnej (Polonyi 1996)
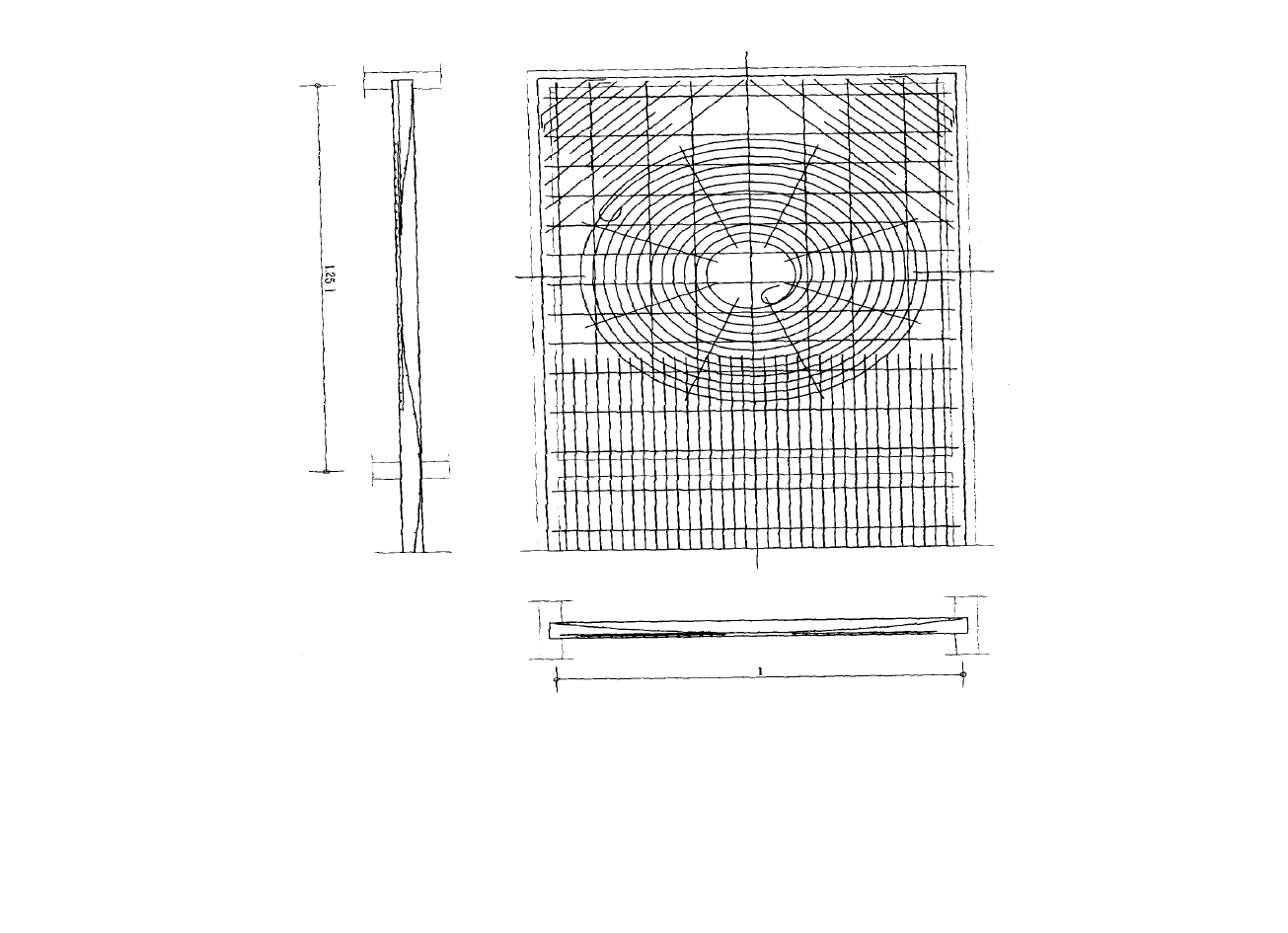
Efektywne zbrojenie płyty ciągłej (Polonyi 1996).
Efektywne zbrojenie płyty ciągłej (Polonyi 1996).
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
Wyszukiwarka
Podobne podstrony:
Modelowanie Section 7 kryt beton
Modelowanie Section 5 krat skzg Nieznany
modelowanie systemow
modelowanie procesˇw transportowych
Silosy section 3 6
Modelowanie biznesowe
MODELOWANIE DANYCH notatki
MWB 1 Wprowadzenie do modelowania wymagań w bezpieczeństwie
E nawigacja jako proces modelowania
i 9 0 Modelowanie i modele
13 Modelowanie form odziezy dla Nieznany (2)
,Modelowanie i symulacja system Nieznany (3)
Modelowanie w Robocie (płyta słup)(1)
cw1 modelowanie id 122786 Nieznany
więcej podobnych podstron