
Laboratorium Elektrokonstrukcji Pojazdów Trakcji Elektrycznej
Temat:
Badanie układu zasilania pojazdu trakcyjnego z silnikiem
asynchronicznym
Zakład Trakcji Elektrycznej
IME PW 2013

1
1.
Wstęp
Pierwsze wykorzystanie silników trójfazowych asynchronicznych do napędu pojazdów
trakcyjnych sięga początków historii trakcji elektrycznej, kiedy to firma BBC (później ABB i
Adtranz) w 1899 roku zbudowała w systemie trójfazowym zasilania pojazdy i całą linię
kolejową o długości 45 km z Burdorf do Thun w Szwajcarii. Wówczas elektryfikacja była
wyzwaniem wobec dominującej trakcji parowej. Firmy na własny koszt opracowały i
dostarczały lokomotywy elektryczne z różnymi systemami napędu elektrycznego, w których
silniki trójfazowe były jedna z możliwych alternatyw. W latach 1899-1903 firmy Siemens i
AEG (dziś Adtranz) prowadziły w Niemczech próby z lokomotywami i wagonami
napędzanymi silnikami trójfazowych na próbnym torze z prędkością 216 km/h. Była to
zawrotna prędkość, którą w owym czasie żaden inny pojazd nie mógł osiągnąć. W następnych
latach wprowadzono system trójfazowy na wielu liniach kolejowych na Węgrzech, we
Włoszech i Szwajcarii. Wraz ze wzrostem mocy lokomotyw, zwiększeniem wielkości
napięcia w sieci trakcyjnej rosły trudności techniczne tak, że zarówno technicy, jak i zarządy
kolejowe były bardziej zainteresowane rozwojem systemu prądu stałego i przemiennego
jednofazowego. Musiało upłynąć pół wieku zanim wyprodukowano półprzewodniki dużych
mocy, jak tyrystory GTO i tranzystory mocy, aby napęd trójfazowy jako najbardziej efektywny
pod względem ekonomicznym i parametrów technicznych stał się nowym standardem na
kolei. Dawne lokomotywy z silnikami trójfazowymi wymagały zasilania tylko z sieci
trakcyjnej trójfazowej. Zwykle prowadzono dwa równolegle izolowane między sobą
napowietrzne przewody trakcyjne stanowiące dwie fazy. Trzecia faza była podłączona do
szyn. Regulacja prędkości odbywała się poprzez przełączenia w silnikach gwiazda-trójkąt i
zmianę ilości biegunów oraz włączenia dodatkowych oporników.
2. Struktura obwodu głównego lokomotywy.
Obecne lokomotywy z napędem trójfazowym mogą być zasilane zarówno z trakcji
prądu stałego, jak i przemiennego jednofazowego, gdyż napięcie trójfazowo jest wytwarzane
wewnątrz lokomotywy. Trójfazowe silniki lokomotywy są zasilane z sieci trakcyjnej za
pośrednictwem urządzenia nazywanego falownikiem. Falownik przekształca stale napięcie
wejściowe na trójfazowe na wyjściu. W przypadku sieci trakcyjnej prądu przemiennego musi
być zastosowany dodatkowo prostownik wewnątrz pojazdu. W sieci prądu
stałego prostownik
jest niepotrzebny i dzięki temu pojazd może być tańszy i prostszy.
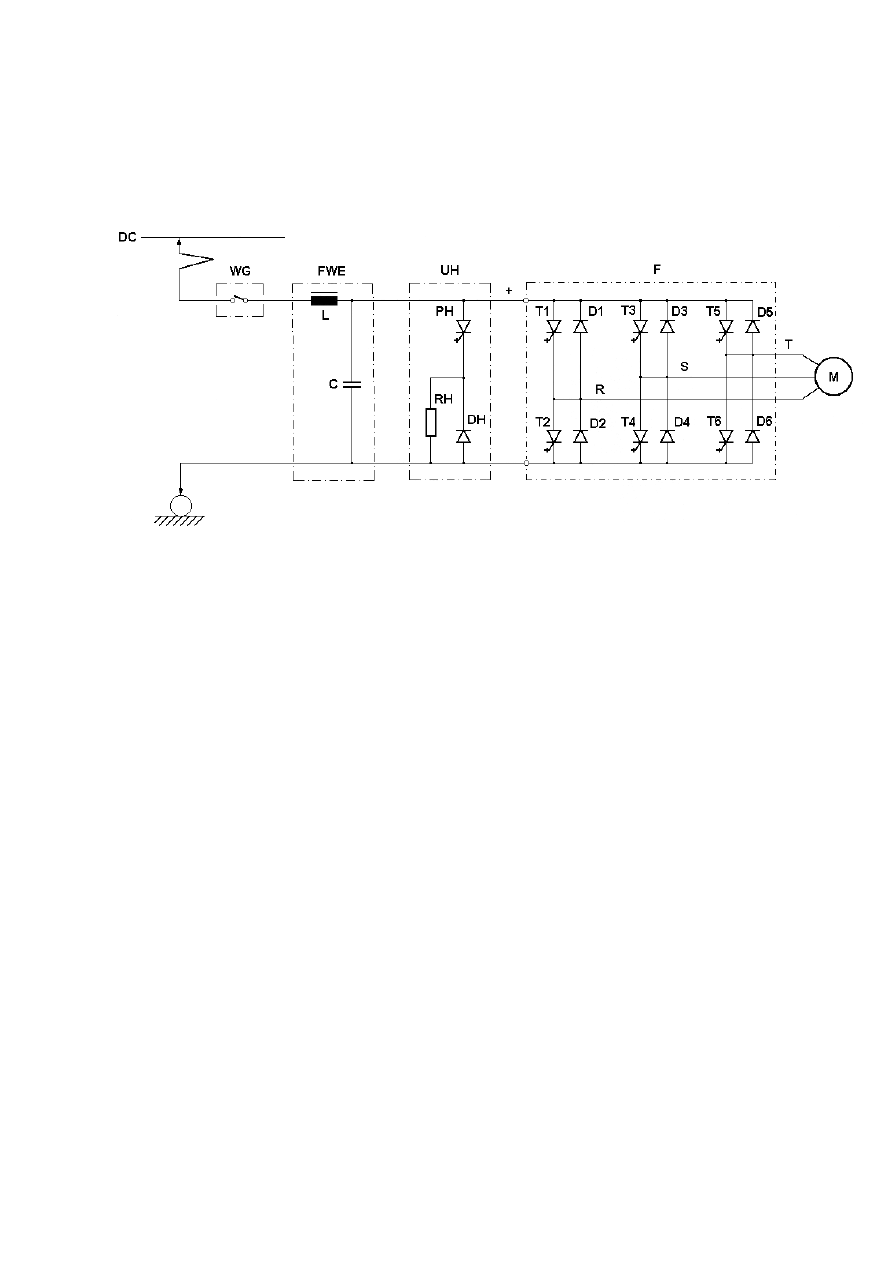
Na rys. 1 pokazano prosty
obwód główny pojazdu zasilanego z sieci prądu stałego z napędem trójfazowym
asynchronicznym. Filtr wejściowy FWE złożony z dławika L i baterii kondensatorów C
spełnia tę samą funkcję, jak w pojazdach z regulacją impulsową napędów z silnikami prądu
stałego. Falownik trójfazowy F stanowi podstawowy fragment obwodu głównego. Podczas
rozruchu zamienia napięcie stałe, doprowadzane z filtru wejściowego, na przemienne
trójfazowe na wyjściu zasilające silnik M. Wówczas przepływ mocy ma kierunek od filtru
2
FWE do silnika M.
W czasie hamowania przepływ mocy zostaje odwrócony i ma kierunek od
silnika M do filtru
FWE, zaś falownik zamienia trójfazowe napięcie na silniku na stale doprowadzane do filtru i
układu hamowania. Układ hamowania oporowego UH, złożony z przekształtnika hamowania
PH, diody DH i rezystora hamowania RH, jest impulsowo włączany, gdy podczas hamowania
elektrycznego sieć trakcyjna nie może odebrać wytworzonej energii.
Rys. 1. Schemat prostego obwodu głównego
WG - wyłącznik główny, WE - filtr wejściowy, LIC- indukcyjność i pojemność filtru
wejściowego , UH - układ hamowania oporowego, PH, DH, RH- odpowiednio przekształtnik,
dioda i rezystor hamowania oporowego, F - falownik trójfazowy, T1, D1,.... T6, D6 -
odpowiednio tyrystory i diody falownika, M - silnik trójfazowy asynchroniczny
Wówczas rezystor RH stanowi sztuczne obciążenie i nadmiar energii jest rozproszony w
postaci ciepła. Poprzez zmianę wysterowania przekształtnika PH można zmieniać ilość
energii oddawanej do sieci. Gdy wysterowanie
α
=0 (przekształtnik PH wyłączony), cała
energia przepływa do sieci i jest to pełne hamowanie odzyskowe. Jeśli wysforowanie
α
=1
(przekształtnik PH załączony) cała energia jest rozpraszana w rezystorze RH i jest to pełne
hamowanie oporowe. Dla pośrednich wartości wysterowania 0<
α
<1 jest hamowanie
mieszane, tzn. jednocześnie, choć w różnym stopniu, energia jest doprowadzana do sieci
trakcyjnej i opornika hamowania. Poprzez odpowiednie sekwencje załączania i wyłączania
sześciu tyrystorów w falowniku można wywołać postój, rozruch, wybieg i hamowanie
elektryczne bez żadnego przełączania styków. Falownik spełnia również funkcje nawrotnika.
Tylko 7 impulsów sterujących, tj. 6 do falownika i 1 do przerywacza PH z zachowaniem
odpowiedniej wzajemnej sekwencji, umożliwiają uzyskanie wszystkich stanów rozruchowych
pojazdu. Do wyjścia falownika podłączone jest trójfazowe uzwojenie pierwotne silnika M. W
przypadku użycia większej liczby silników można je łączyć równolegle do jednego wspólnego
falownika lub dla każdego silnika przewidzieć oddzielny falownik, natomiast wejście
falownika (od strony prądu stałego) łączyć równolegle. Silnik jest maszyną trójfazową
indukcyjną bezkomutatorową i ma dwa uzwojenia. Uzwojenie pierwotne jest nieruchome
umieszczone w stojanie i za pomocą zewnętrznych zacisków połączone ze źródłem zasilania
3
(falownik). Uzwojenie wtórne zaś jest ruchome umieszczone w wirniku i najczęściej
wykonane jako klatkowe ze spawanych prętów miedzianych, mosiężnych lub jako odlew w
całości z aluminium bądź jego stopów. W czasie normalnej pracy nie ma dostępu do
uzwojenia wtórnego. Wszystkie parametry i stany pracy silnika, takie jak: kierunek
wirowania, prędkość obrotowa, moment obrotowy, praca silnikowa lub prądnicowa wynikają
z częstotliwości i amplitudy trzech napięć doprowadzanych do trzech zacisków uzwojenia
pierwotnego. Silnik ma bardzo prostą konstrukcję, brak komutatora i wszelkich trących części
przewodzących prąd. W porównaniu z silnikiem prądu stałego jest on zdecydowanie tańszy,
lżejszy, łatwiejszy do zaprojektowania i wykonania, zaś w eksploatacji jest tańszy i trwalszy.
Prędkość obrotowa silnika praktycznie zależy tylko od częstotliwości napięcia zasilającego
podawanego z falownika i jest niemalże równa prędkości wirowania pola magnetycznego
wywołanego tym napięciem wewnątrz silnika. Tę niewielką różnicę prędkości charakteryzuje
parametr s - nazywany poślizgiem. Poślizg zwykle jest bardzo mały i stanowi ułamek procenta
prędkości znamionowej. Jest to ważna właściwość, która w przypadku utraty przyczepności
zestawu kołowego nie pozwala na rozbieganie się silnika w czasie rozruchu lub zablokowaniu
się zestawu kołowego podczas hamowania. Trójfazowy falownik składa się z trzech gałęzi
stanowiących 3 fazy. Każdą z gałęzi tworzą dwa jednakowe, górny i dolny. zawory
zbudowane z tyrystora GTO lub tranzystora mocy oraz z diody przeciwrównoległej. Zawory te
podczas normalnej pracy są naprzemienne załączane i wyłączane z częstotliwością równą w
najprostszym przypadku częstotliwości napięcia na wyjściu falownika. Wszystkie trzy fazy
pracują tak samo z tym, że chwile przełączenia zaworów w poszczególnych fazach RST są
przesunięte wzajemnie o 1/3 okresu, stąd na wyjściu falownika uzyskuje się trójfazowe
napięcie przemienne. Napięcie na zacisku wyjściowym R, S lub T w poszczególnych fazach
może przyjmować tylko dwie wartości, tj. gdy załączony jest dolny zawór - wartość w
przybliżeniu równa zeru, zaś gdy załączony jest górny zawór, wartość praktycznie równa się
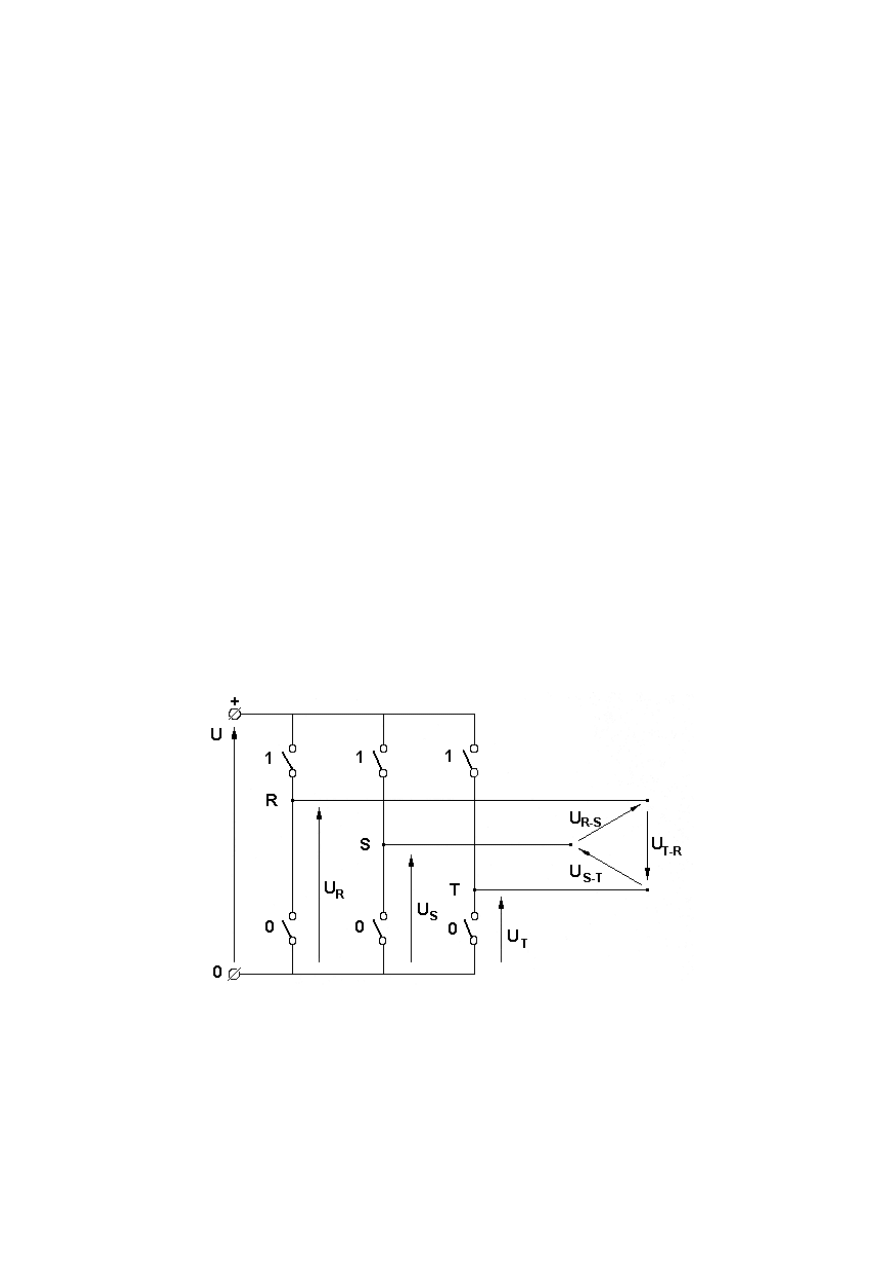
napięciu sieci trakcyjnej U. Dla uproszczenia analizy można zawory półprzewodnikowe
zastąpić idealnymi łącznikami i otrzymać uproszczony schemat falownika jak na rys. 2.
Rysunek 2. Uproszczony schemat falownika
Podczas pracy falowniku możliwych jest tylko 8 różnych stanów (tab. 1) i tyle jest różnych
kombinacji przy zaworach: 2
3
= 8, z tego tylko pierwszych sześć jest powtarza nych
cyklicznie. Stan 7 i 8 odpowiada wymuszeniu na wyjściu międzyfazowych napięć równych 0,
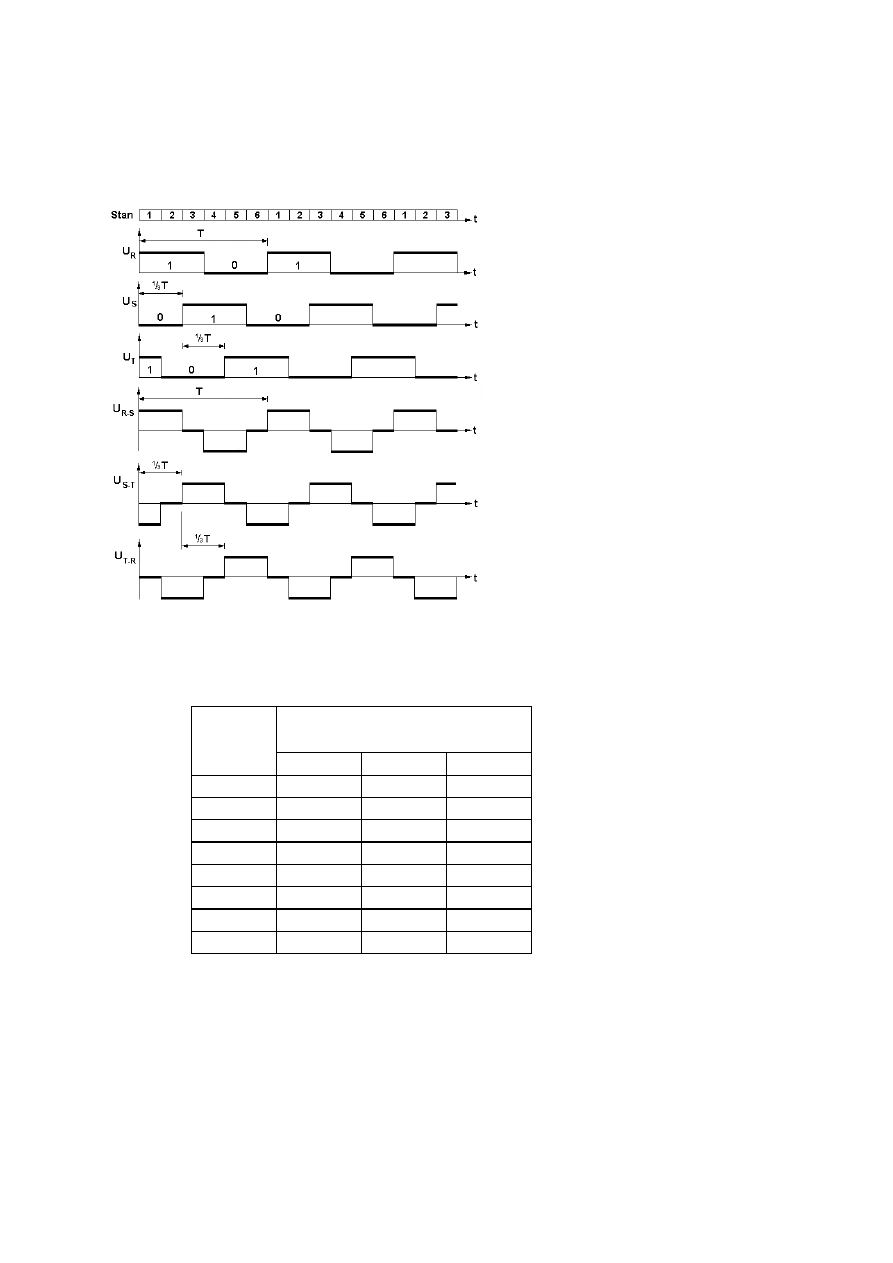
co jest wykorzystywane przy specjalnym sposobie sterowania. Przyjmijmy najprostszy sposób
pracy falownika, w którym górny i dolny zawór w każdej z faz załączane są naprzemiennie
4
dokładnie przez pół okresu, zaś przesunięcie czasowe między kolejnymi fazami wynosi 1/3
okresu. Wówczas przebiegi napięć oraz występowanie poszczególnych stanów będą jak na
rys. 3. Prostokątny kształt przebiegu wynika z impulsowej pracy zaworów i oznacza, że
oprócz podstawowej harmonicznej występują dodatkowe wyższe harmoniczne. Aby je
wyeliminować lub przynajmniej ograniczyć należy zastosować inny, bardziej korzystny
sposób sterowania praca zaworów falownika.
Rysunek 3. Przebiegi napięć w falowniku.
Tabela 1
FAZA
STAN
R
S
T
1
1
0
1
2
1
0
0
3
1
1
0
4
0
1
0
5
0
1
1
6
0
0
1
7
0
0
0
8
1
1
1
3. Sterowanie
Sterowanie napędem pojazdu zapewnia elektroniczny układ mikroprocesorowy, który
wypracowuje sygnały do przełączania zaworów. Do przesyłania sygnałów ze sterownika do
zaworów służą światłowody, które są odporne na zakłócenia elektromagnetyczne i zapewniają
dobra separację galwaniczna. Poprzez odpowiednie zaprogramowanie sterownika można
uzyskać minimalizację odkształceń napięć i prądów w silnikach trakcyjnych, podnieść
sprawność napędu. Program jest układany w oparciu o bardzo złożone zależności
5
matematyczne, te zaś wynikają z wybranej metody sterowania, np. metoda wektora
przestrzennego lub metoda bezpośredniego sterowania (ang. DSC - Direct Self Control).
Opracowanie właściwego programu jest bardzo trudnym zadaniem i wymaga współpracy
wykwalifikowanych specjalistów, min. programistów, energoelektroników, sieciowców,
projektantów silników i konstrukcji mechanicznych. Napęd silnikami trójfazowymi jest
obecnie powszechnie stosowany w taborze kolejowym, metrze i tramwaju. Charakterystyki
ruchowe pojazdu można kształtować praktycznie dowolnie poprzez zmianę funkcji w
sterowniku mikroprocesorowym. Pojazd nie ma żadnej aparatury manewrowej, tj. żadnych
styczników, ruchomych elementów załączających lub wyłączających prąd w obwodzie
głównym, z wyjątkiem jednego wyłącznika głównego. Silnik trakcyjny bezkomutatorowy nie
ma żadnych zużywających się elementów przewodzących prąd. Małe gabaryty i masa napędu
w stosunku do mocy pozwalają na budowę lokomotyw o większej mocy i lżejszych wózkach,
które mniej oddziałują na tor, natomiast w metrze i w tramwaju można wygospodarować
więcej miejsca dla pasażerów. Wyższa cena zakupu zostaje skompensowana niskimi kosztami
eksploatacyjnymi, wynikającymi z oszczędności na wymianie zużywających się części, na
robociźnie oraz podwyższenia zdolności przewozowej.
4. Układy z modulacją szerokości impulsów.
Regulacja prędkości obrotowej silnika indukcyjnego poniżej prędkości znamionowej
wymaga zasilania silnika napięciem o zmiennej częstotliwości i amplitudzie (dotyczy
amplitudy podstawowej harmonicznej napięcia). Wartość amplitudy podstawowej
harmonicznej napięcia powinna być dostosowana do częstotliwości synchronicznej zasilania
silnika. Najczęściej pomiędzy napięciem i częstotliwością zachodzi relacja:
U
1h
/f
s
=const.
gdzie: f
s
=częstotliwość synchroniczna zasilania silnika, U
1h
- amplituda podstawowej
harmonicznej napięcia zasilania silnika.
Warunek ten zapewnia zachowanie wartości znamionowej strumienia silnika i
przeciążalności. Jako układ zasilania silnika do regulacji prędkości obrotowej służy falownik
napięcia rysunek 4. Kształt napięcia na wyjściu falownika nie zależy od charakteru
obciążenia, dlatego jest on powszechnie stosowany. Przebiegi napięć wyjściowych falownika
trójfazowego mają kształt fali prostokątnej i są przesunięte wzajemnie o kąt
ω
t=120
o
el
(tj.2*
Π
/3). Napięcie na każdej z faz silnika ma kształt trójschodkowy. Regulację
Współczesny silnik asynchroniczny dużej mocy
6
częstotliwości i wartości napięcia (amplitudy podstawowej harmonicznej napięcia)
zasilającego silnik indukcyjny można uzyskać przez odpowiednie załączanie tyrystorów
falownika. Napięcie silnika o zadanej częstotliwości i wartości formuje się z ciągu impulsów
prostokątnych o dużej częstotliwości, zwanej częstotliwością nośną- modulacja szerokości
impulsów. Długość poszczególnych impulsów napięcia o częstotliwości nośnej zmienia się w
czasie proporcjonalnie do funkcji sinusoidalnej. Na rysunku 5 przedstawiono przebieg
napięcia fazowego i prądu silnika.
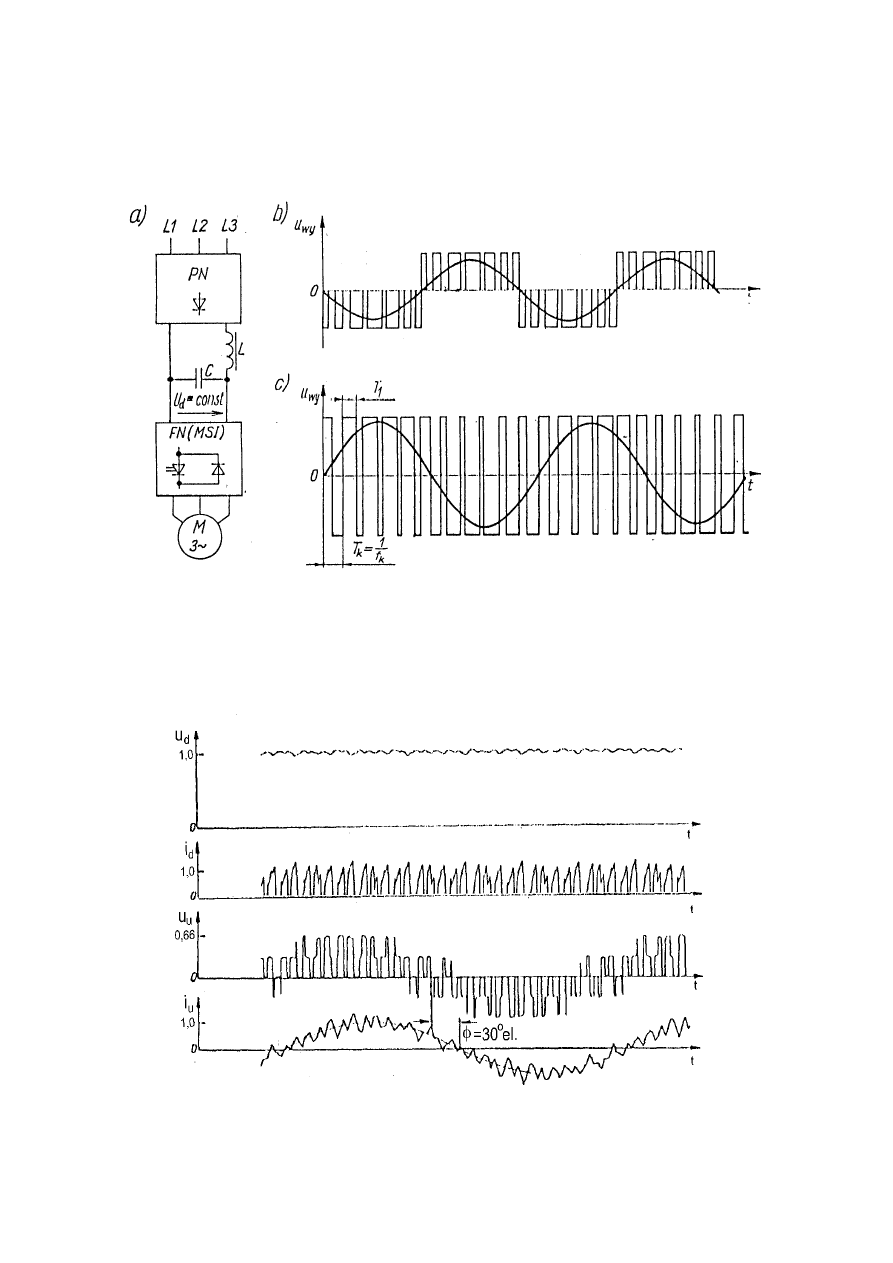
Rys. 4. Przemiennik częstotliwości z pośredniczącym obwodem napięcia stałego i
falownikiem z modulacją szerokości impulsów: a)schemat blokowy układu; b) modulacja
jednobiegunowa; c) modulacja dwubiegunowa.
7
Rys. 5 Przebiegi czasowe kolejno od góry u
d
- napięcia obwodu pośredniczącego; i
d
-prądu
obwodu pośredniczącego (prądu zasilającego falownik); u-napięcia fazowego; i- prądu silnika
przy modulacji szerokości impulsów.
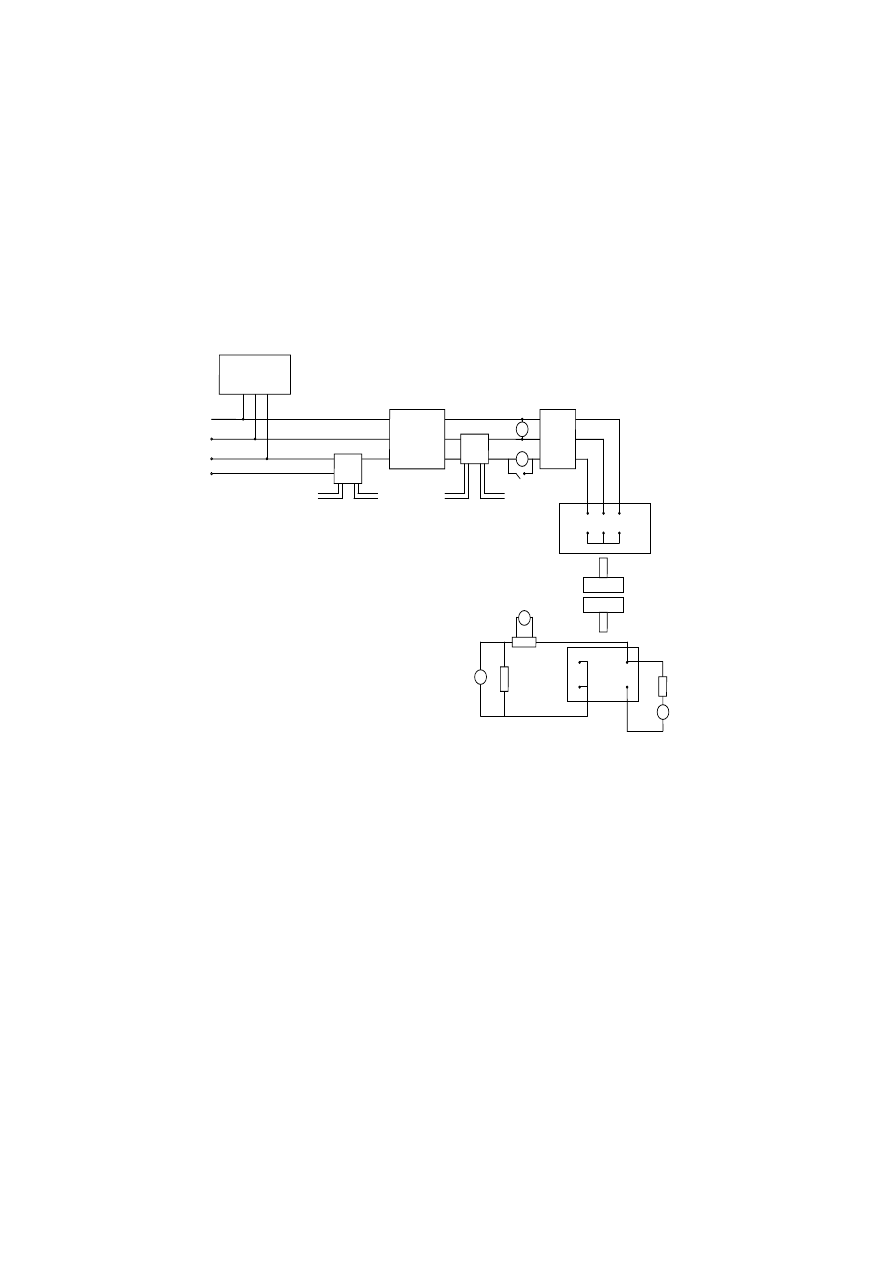
5. Opis stanowiska badawczego
Stanowisko laboratoryjne do badania silnika klatkowego składa się:
a) zespołu silnik asynchroniczny klatkowy - prądnica prądu stałego (obcowzbudna), b)
falownika napięcia (prostownik trójfazowy, kondensator pośredni, falownik napięcia), c)
zespołu oporów obciążenia prądnicy prądu stałego, d) obwodu regulacji wzbudzenia prądnicy,
c) części pomiarowej
VOLTECH
R
S
T
0
Lem
+
-
+
-
Osc
U
Osc
I
Osc
Lem
+
-
+
-
Osc
U
I
Falownik
V
A
W
sprz
ę
gło
U V W
y
x
z
silnik
V
A
A
H
A
F
E
R
ob
R
w
I
w
I
p
V
p
k
Rys. 6 Stanowisko laboratoryjne
Voltech - miernik napięć i prądów sieci energetycznej zasilającej układ prostownika z
falownikiem. Lem - układ pomiaru prądu z separacją galwaniczną pomiary dla oscyloskopu,
V – woltonierz - pomiar napięcia międzyfazowego silnika U
s
, A- amperomierz-pomiar prądu
fazowego silnika, W watomierz , pomiar mocy czynnej silnika.
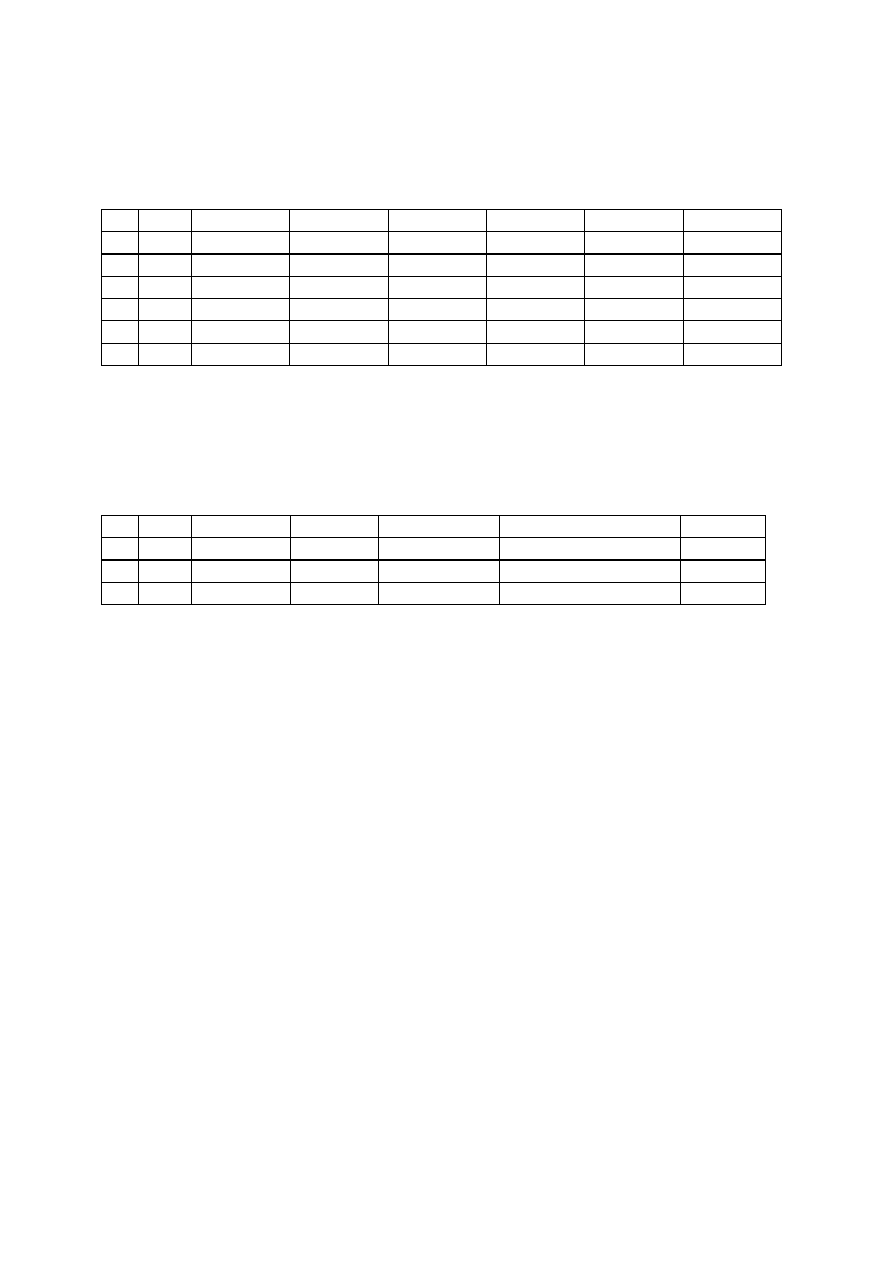
6. Przebieg ćwiczenia.
1. Wykonaj pomiary w funkcji częstotliwości synchronicznej zasilania silnika F
s
[Hz] .
Wyniki zanotuj w tabeli 2
P
wej
– moc wejściowa czynna układu [W], I
sil
– prąd zasilania silnika [A], I
sieć
– prąd sieciowy
(prąd zasilania podstacji ) [A], P
wej
[W] – moc wejściowa układu
8
Na wydruku zwróć uwagę na ilość przełączeń fali napięcia falownika dla małej i dużej
częstotliwości zasilania falownika.
Tabela 2
Lp F
s
U
sk_sil
[V]
I
sil
[A]
I
sieć
[A]
P
wej
[W]
10
Wydruk
20
30
40
50
Wydruk
55
2. Dla częstotliwości ........Hz dokonaj pomiarów. Wyniki zanotuj w tabeli 3
Tabela 3
Lp F
s
U
sk_sil
[V]
I
sil
[A]
P
wej
[W]
M
ob.
minimalne
wydruk
M
ob.
maksymalne
wydruk
Dotyczy wydruku dla tabeli 2 oraz 3.
A) Wydruk dotyczy napięcia fazowego silnika, prąd zasilania podstacji
B) Wydruk dotyczy napięcia międzyfazowego silnika, prądu silnika.
Zmierz za pomocą oscyloskopu amplitudę, częstotliwość prądu podstacji. Na rysunkach opisz
amplitudy, częstotliwość i inne Twoim zdaniem interesujące wielkości.
Pomiary analogowe: Woltomierz V1- pomiar napięcia wejściowego przerywacza ( U
we
).
Amperomierz. A2 –pomiar prądu zasilania silnika. Woltomierz V2- pomiar napięcia zasilania silnika A3 –pomiar
prądu obciążenia prądnicy. Woltomierz V3- pomiar napięcia obciążenia prądnicy, A4 –pomiar prądu wzbudzenia
prądnicy. Mierniki analogowe służą do odczytu zgrubnego, ich wskazania obarczone są dużym błędem.
Pomiary cyfrowe realizowane są za pomocą oscyloskopu cyfrowego. Sygnały
pomiarowe prądu i napięcia zasilania silnika separowane są galwaniczne od wejść
oscyloskopu poprzez separatory hallotronowe (układy HU
1
i HI
1
.) Wyjścia z układów HU
1
HI
1
połączone są z oscyloskopem. Współczynnik skali dla pomiaru prądu wynosi ....,
natomiast współczynnik skali dla pomiaru napięcia wynosi .........
Uwaga
: Odczyty wskazań z oscyloskopu z uwagi, że pomiar odbywa się za pomocą separatorów
galwanicznych należy pomnożyć przez współczynnik skali dla pomiaru napięcia i prądu. Współczynnik skali dla
prądu wynosi ....................... a dla napięcia ....................... W tabeli zapisujemy wartości rzeczywiste.
Kacprzak J., Podstawy napędu elektrycznych pojazdów trakcyjnych. WKŁ 1990
Tunia H, Winiarski B: Energoelektronika. WNT Warszawa 1994.
Tunia H, Winiarski B: Energoelektronika w pytaniach i odpowiedziach. WNT Warszawa
1996.
Wyszukiwarka
Podobne podstrony:
cw med 5 id 122239 Nieznany
cw excel3 id 166408 Nieznany
cw 6 podobienstwo id 122439 Nieznany
cw 13 id 121763 Nieznany
Cw mikrob 2 id 122249 Nieznany
CW K2 id 217375 Nieznany
cw mocz id 100534 Nieznany
cw med 2 id 122233 Nieznany
cw 11 id 122151 Nieznany
Instrukcja cw 3 PI id 216486 Nieznany
cw 1 ZL id 100327 Nieznany
CW 08 id 122562 Nieznany
cw 12 id 122179 Nieznany
cw excel2 id 122222 Nieznany
A ET cw 6 MRJ3A id 49207 Nieznany (2)
Fundamentowanie cw cz 2 id 181 Nieznany
MD cw 08 id 290129 Nieznany
MD cw 02 id 290123 Nieznany
cw 5 stokes id 121301 Nieznany
więcej podobnych podstron